ЭО-5124 () (ЭО-5124)- описание, характеристики, история.
Экскаватор ЭО-5124 и модификации предназначен для выполнения комплекса различных земляных работ в коммунальной, дорожно-строительной, добывающей и нефтегазовой отраслях, оптимально подходит для разработки не мёрзлых грунтов I-IV категорий, рыхления мёрзлых грунтов, погрузки в транспортные средства сыпучих материалов и предварительно разрыхлённых твёрдых пород кусками величиной не более 1/3 ширины ковша в температурном диапазоне от -40 до +40°С.
Основным рабочим оборудованием экскаватора является обратная лопата с ковшом. На экскаваторе предусмотрена возможность установки на обратную лопату зуба-рыхлителя для рыхления мёрзлых и прочных грунтов, а также установки грейферного оборудования с двухчелюстным грейфером капающего типа и еще 11 видов сменного рабочего оборудования. Рабочее оборудование прямая лопата оснащено основным ковшом. В зависимости от разрабатываемого грунта рабочее оборудование обратная и прямая лопата могут комплектоваться сменными ковшами как большей, так и меньшей вместимости.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
| Тип, марка двигателя | дизельный ЯМЗ-8484-10 |
|---|---|
| Мощность, кВТ(л.с.) | 125(170) |
| Расход топлива, г/мЗ разработанного грунта | 96,5 |
| Объем топливного бака, л | 400 |
| Объем гидросистемы, л | 570 |
| Габаритные размеры, мм: | |
| — длинна | 11 770 |
| — ширина без настила | 3 400 |
| — высота | 4 460 |
| Масса эксплуатационная, тн | 39 |
| Давление на грунт, КПа (кгс/см2) | 82(0,82) |
| Способ транспортировки: | |
| — ж/д транспорт | 1 платформа |
| — трейлер, грузоподъемность, тн | 40 |
Экскаватор ЭО-5124А фотографии и технические характеристики
Экскаватор ЭО-5124А фотографии и технические характеристикиПредназначен для
разработки грунтов I-IV категорий и погрузки предварительно разрыхленных
скальных и мерзлых грунтов с величиной кусков не более 600мм, а так
же разработки глубоких выемок под возведение сооружений способом «стена
в грунте» при температуре воздуха от -40С до +40С.
|

Технические характеристики | |
Тип, марка двигателя | дизельный ЯМЗ-8484-10 |
Мощность, кВТ(л.с.) | 125(170) |
Расход топлива, г/мЗ разработанного грунта | 96,5 |
Объём топливного бака, л | 400 |
Объём гидросистемы, л | 570 |
Габаритные размеры, мм | |
длинна | 11770 |
ширина без настила | 3400 |
| высота | 4460 |
Масса эксплуатационная, т | 39 |
Давление на грунт, КПа (кгс/см2) | 82(0,82) |
Способы транспортировки: | |
ж/д транспортом | 1 платформа |
трейлером грузоподъёмностью | 40тонн |
Возможна дополнительная комплектация: автономным отопителем кабины, кондиционером, расширенным комплектом ЗИП | |
Вал ( на ЭО-5124 ) 5124 11-09-001 на экскаваторы ЭО-5124, ЭО 5122, ЭО 5225 и аналоги
Компания «Кран-мастер» специализируется на продажах специальной дорожной и строительной техники, а так же на реализации комплектующих запчастей, модулей и дополнительного оборудования.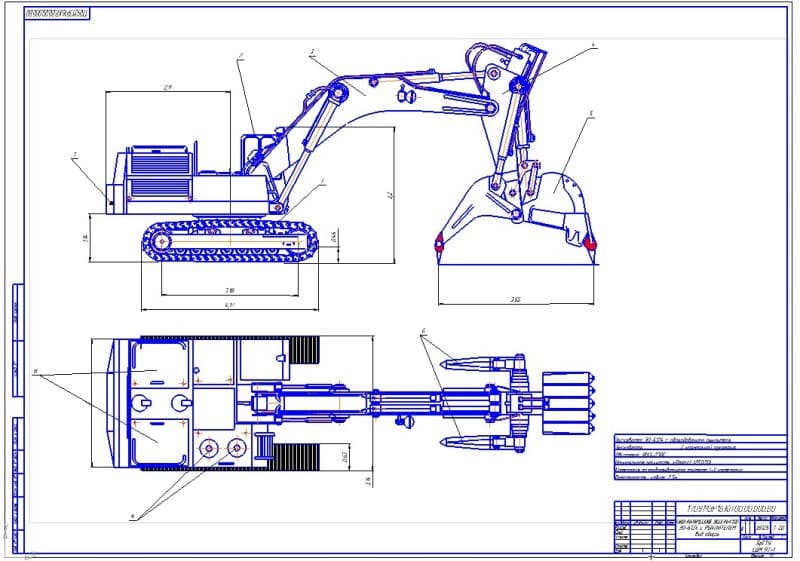
Наши клиенты предпочитают работу с нами не только из-за выгодных ценовых предложений и комфортных условий сотрудничества, а так же благодаря нашей сплочённой команде профессионалов, высококлассных специалистов в области стрелового, грузоподъемного, кранового, механического оборудования, а так же комплектации к этим механизмам. Стать клиентом компании «Кран-мастер» это не только получить надежного и выгодного поставщика, но и знать, что вы всегда можете довериться нашему опыту. Вас всегда проконсультируют ведущие специалисты, и помогут определится с выбором техники или специального модуля.
Наша компания гарантирует качество поставляемого товара, и бережное, дружеское отношение к каждому клиенту, вне зависимости от объемов и частоты ваших заказов.
Оперативный поиск и доставка серийных деталей и изготовленных по индивидуальному заказу, продажа спецмашин оптом и в розницу – вот конечная цель, ради которой мы работаем. Достичь ее позволяют годами отработанные связи с ведущими производителями грузоподъемной, дорожно-строительной и другой спецтехники.
Что мы предлагаем?
Компания «Кран-Мастер» специализируется одновременно в нескольких направлениях. Основным и предпочтительным видом деятельности для нас является продажа новых и б/у спецмашин и запчастей к ним. Однако, сотрудники предприятия также занимаются их дальнейшим обслуживанием и ремонтом. Это дает возможность более полно реализовывать потребности заказчиков, оперативно реагируя в случае возникновения непредвиденных ситуаций. Ведь мы не просто продаем спецтехнику. Мы четко представляем, какие запчасти потребуются клиенту, если она выйдет из строя, и, при необходимости, произведем ее профессиональный ремонт.
Своим заказчикам мы предлагаем следующие виды товаров и услуг:
Широкий ассортимент спецтехники и запчасти к ней
- Автомобильная спецтехника — трал полуприцеп, полуприцепы бортовые, тяжеловозы полуприцепы, контейнеровозы;
- Грузоподъемная спецтехника – краны (гусеничные, башенные, стреловые), автокраны;
- Строительная спецтехника – экскаваторы, сваебойные коперы, бульдозеры, болотоходы-бульдозеры, погрузчики;
- Дорожная спецтехника – автогрейдеры, ямобуры; мусоровозы, погрузчики, автогидроподъемники, коммунальные машины
Оборудование
- Системы защиты и управления, блоки управления, датчики, джойстики, приборные панели и указатели, преобразователи и реле.

- Грузоподъемное оборудование: блоки монтажные, лебедки, стропы, тали, канаты, такелажное оборудование.
- Стреловое оборудование: основание стрелы, секции стрелы, вставки, гусек
- Грузоподъемное оборудование: подвески крюковые, блоки полиспаста, канаты стальные, чалки, ванты.
- Гидрооборудование: гидроцилиндры, гидромоторы, гидронасосы, гидрораспределители, гидрозамки, гидроклапаны.
- Лебедки и крановые редукторы: одноступенчатые, двухступенчатые, вертикальные, специальные.
- Электрооборудование: контакторы, пускатели, выключатели, блоки резисторов, приборы безопасности, пускатели, токосъемники, вибраторы, предохранители, реле, предохранители, разрядники.
- Механические узлы: опорно-поворотные устройства, коробки отбора мощности, редуктора.
- Резинотехнические изделия: кольца, манжеты и фторопластовые изделия
Запасные части для спецтехники могут быть, по желанию заказчика, установлены на его технику, причем в большинстве случаев не обязательно приезжать в наш цех: в компании Кран-Мастер есть специальная техника, оснащенная оборудованием для монтажа и демонтажа, и бригады опытных мастеров. В сжатые сроки они выедут по указанному адресу и проведут необходимые работы.
Ремонт и обслуживание спецтехники
Высокий уровень подготовки персонала, собственный ремонтный цех, оснащенный современным оборудованием, и складские помещения, позволяющие вместить всю линейку необходимых для ремонта запчастей – гарантия оперативного и качественного ремонта вашей спецтехники. Квалифицированные сотрудники на профессиональном уровне проведут техническое обслуживание и ремонт вашей машины. А выездная ремонтная бригада приедет на ваш объект для первоначальной диагностики и установления причины возникновения неисправности.
| Адаптер 21.07.001 | Экскаваторы ЕК-14, ЕК-18, ЕТ-18 | По запросу |
Адаптер 23. 21.202 21.202 |
Экскаваторы ЕК-12 | По запросу |
| Адаптер 25.15.002 | Экскаваторы ЕТ-25 | По запросу |
| Адаптер 5124А 15-03-105 | Экскаваторы ЭО-5124А (после 99г.), ЭО-5225 | По запросу |
| Адаптер 5221 15-01-402 | Экскаваторы ЭО-5123, ЭО-5124, ЭО-5225, ЭО-5124А (до 99г.) | По запросу |
| Бак масляный 26.1802.000 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Блок золотников 5122А.04.23.000-1сб | Экскаваторы, ЭО-5126 | По запросу |
| Блок золотников 5122А.04.28.000-1сб | Экскаваторы, ЭО-5126 | По запросу |
| Блок клапанов 4225А.16.78.200 | Экскаваторы, ЭО-4124, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Блок клапанов 640.11 (с ПГА для ЭО-3322) | По запросу | |
| Блок клапанов переливных 520.70.00.000 | Экскаваторы, ЕТ-25 | По запросу |
| Блок управления 13.80.04.400 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Блок управления 13.80.04.450 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Блок управления 13.80.04.500 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Блок управления 13.80.04.600 | Экскаваторы | По запросу |
| Блок управления 13.80.04.700 | Экскаваторы | По запросу |
| Блок управления 13.80.04.750 | Экскаваторы | По запросу |
Боек 03. 41.001 41.001 |
Экскаваторы МГ-300А, СП-71 | По запросу |
| Болт карданный длинный М14х1,5х40 70.60.002 | Экскаваторы | По запросу |
| Болт карданный короткий М14х1,5х30 70.60.003 | Экскаваторы | По запросу |
| Болт М24х2 крепления вильчатого зуба | Экскаваторы | По запросу |
| Букса 03.41.500 | Экскаваторы МГ-300А, СП-71 | По запросу |
| Вал 4121.16.02.006 | Экскаваторы ЭО-4121 | По запросу |
| Вал 4124.16.32.005 | Экскаваторы ЭО-4124, ЭО-4224 | По запросу |
| Вал 4125.16.62.005 | Экскаваторы ЭО-4225 | По запросу |
| Вал 652.970.00.1 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Вал выходной Э4.03.01.008 | Экскаваторы, ЭО-5126 | По запросу |
| Вал механизма поворота ЭО-3322Б.03.30.006 | Экскаваторы, ЕК-18 | По запросу |
| Вал-шестерня 20.50.006 | Экскаваторы ЭО-3323А | По запросу |
| Венец зубчатый 5221.01.02.001 | Экскаваторы, ЭО-5126 | По запросу |
| Водило 20.40.005 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Водило 4225.16.72.009 | Экскаваторы ЭО-4225, ЭО-4225А | По запросу |
| Вращающее соединение 264.700 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Втулка 114-00.00.007 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
Втулка 4125. 16.62.007 16.62.007 |
Экскаваторы ЭО-4125 | По запросу |
| Втулка 4125.26.55.001 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Втулка В-41.18.013.047 | Экскаваторы ЭО-3323, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Втулка В-4125.02.03.002 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Втулка В-50.40х30.047 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Втулка В-50.40х40.047 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Втулка В-60.40х53.047 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Втулка В-60.50х53.047 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Втулка В-70.60х75.047 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Втулка В-77.60х27.047 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Втулка шкворня в сб. 20.30.100 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Гайка болта карданного М14х1,5х15,5 | Экскаваторы | По запросу |
| Гайка болта крепления вильчатого зуба М24 | Экскаваторы | По запросу |
| Гидрозамок 13.71.80.610 (620) | Экскаваторы, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Гидрозамок 13.71.80.670Е | Экскаваторы, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Гидрозамок 13.71.80.680Е | Экскаваторы, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
Гидрозамок 541. 12.10Е 12.10Е |
Экскаваторы, Манипуляторы, Трелёвщики, Буровые установки | По запросу |
| Гидроклапан давления БГ 54-34М | Экскаваторы ЭО-5122, ЭО-5123, ЭО-5124, ЭО-5221, ЭО-5124А, ЭО-5225 | По запросу |
| Гидромолот ГПМ-120 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Гидромолот МГ-300, НМ-230 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Гидромотор 210.12.01.03 | Катки ДУ-74, ДКМ-40, Экскаваторы ЭО-3323А, ЭО-5225 | 26019 |
| Гидромотор 310.12.01 | ДУ-74, ДКМ-40, МД-433, МД-511, КО-318, ЭО-4225А, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18, ЕТ-14, ЕТ-16, ЕТ-18, ЕТ-25, ЭО-5124, ЭО-5126, МЛ-119А | 26019 |
| Гидромотор 310.224А (210.32) | ЭО-3322, ЭО-3326, ЭО-6123 | 59000 |
| Гидромотор МГ 2.12/32.1.Б (210.12.01.03) | Катки ДУ-74, ДКМ-40, Экскаваторы ЭО-3323А, ЭО-5225 | 19990 |
| Гидромотор МГ 3.12/32.1.Б (310.12.01.03) | ДУ-74, ДКМ-40, МД-433, МД-511, КО-318, ЭО-4225А, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18, ЕТ-14, ЕТ-16, ЕТ-18, ЕТ-25, ЭО-5124, ЭО-5126, МЛ-119А | 19990 |
| Гидроцилиндр аутригера левый 114-45.23.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 23506 |
| Гидроцилиндр аутригера правый 114-45.23.000-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 23506 |
| Гидроцилиндр аутригера ЦГ-125.80х400.17 | Экскаваторы, E130W, E160W, E180R | 25369 |
| Гидроцилиндр аутригера, отвала ЦГ-125.80х430.11 (Э20.01.11.001сб-01) | Экскаваторы, ЭО-33211, ЭО-43211 | 50208 |
Гидроцилиндр грейфера ЦГ-60. 40х305.11 40х305.11 |
Экскаваторы, ЕК-18-40 | 16457 |
| Гидроцилиндр грейфера ЦГ-80.40х320.22-01 (ПЭК-36.000) | Экскаваторы, ПЭ-0.8Б, ПЭ-Ф-1А, ПЭ-Ф-1Б | По запросу |
| Гидроцилиндр изгиба стрелы ЦГ-100.60х500.22 (ПЭК-35.000) | Экскаваторы, ПЭ-0.8Б, ПЭ-Ф-1А, ПЭ-Ф-1Б | По запросу |
| Гидроцилиндр ковша (с подш.) ЦГ-160.100х1000.11 (5126 29-06-000) | Экскаваторы, ЭО-5126 (УВЗ) | 140206 |
| Гидроцилиндр ковша (с подш.) ЦГ-160.100х1120.11 (5126 29-06-000-1) | Экскаваторы, ЭО-5126 (ВЭКС) | 143420 |
| Гидроцилиндр ковша (с подш.) ЦГ-180.125х1250.11 (6123 13-05-000) | Экскаваторы, ЭО-6123, ЭО-5225 | 240044 |
| Гидроцилиндр ковша (с подш.) ЦГ-180.125х1600.11 (6123 17-13-000) | Экскаваторы, ЭО-6123 | 265350 |
| Гидроцилиндр ковша 114-45.19.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 24213 |
| Гидроцилиндр ковша ЦГ-100.63х900.11 | Экскаваторы, ЕК-12 | 29089 |
| Гидроцилиндр ковша ЦГ-100.63х900.11-01 | Экскаваторы, E130W, E125W | 37039 |
| Гидроцилиндр ковша ЦГ-110.70х900.11 | Экскаваторы, ЕК-14 | 33437 |
| Гидроцилиндр ковша ЦГ-125.80х710.11 | Экскаваторы, ЭО-3223 | 33806 |
| Гидроцилиндр ковша ЦГ-125.80х800.11-02 | Экскаваторы, E160W, E180R | 36013 |
| Гидроцилиндр ковша ЦГ-125.85х1100.11.000-01сб (12.212.0.000-2) | Экскаваторы, ЭО-33211, ЭО-43211 | 117055 |
Гидроцилиндр ковша ЦГ-140. 90х1000.11-02 (4224.23.20.999) 90х1000.11-02 (4224.23.20.999) |
Экскаваторы, ЭО-4121, ЭО-4124, ЭО-4224, МТП-71, EU-422, EU-423 | 67652 |
| Гидроцилиндр ковша ЦГ-140.90х500.11 | Экскаваторы, планировщики EW-25M1 | 32089 |
| Гидроцилиндр ковша ЦГ-140.90х800.11-01 | Экскаваторы, ЭО-3322Б,ЭО-3326 | 47521 |
| Гидроцилиндр ковша ЦГ-80.56х700.11 | Экскаваторы, ЭО-2628, ЭО-2201, ЭО-2203, Борэкс | По запросу |
| Гидроцилиндр натяж. гусениц 4125А.16.74.200 | Экскаваторы | 16500 |
| Гидроцилиндр натяжения 5122 01-10-200 | Экскаваторы ЭО-5122, ЭО-5123 | По запросу |
| Гидроцилиндр натяжения 5123 01-10-200-4 | Экскаваторы ЭО-5123, ЭО-5124 | По запросу |
| Гидроцилиндр натяжения 5221.01.10.600сб | Экскаваторы, ЭО-5126 | 28600 |
| Гидроцилиндр натяжения гусениц 4121.16.04.100 | Экскаваторы ЭО-4121 | По запросу |
| Гидроцилиндр натяжения гусениц 4125.16.64.200 | Экскаваторы | По запросу |
| Гидроцилиндр опор ЦГ-110.63х680.12 | Экскаваторы, планировщики EW-25M1 (КАМАЗ, МАЗ) | 19381 |
| Гидроцилиндр опор ЦГ-110.63х710.11 | Экскаваторы, планировщики EW-25M1 (МЗКТ) | 26623 |
| Гидроцилиндр опор ЦГ-110.63х866.12 | Экскаваторы, планировщики EW-25M1 (Урал) | 21113 |
| Гидроцилиндр опоры ЦГ-100.63х400.11 | Экскаваторы, ЭО-3323А, ЕК-12, ЕК-14 | 22707 |
| Гидроцилиндр опоры ЦГ-110.56х280.11 | Экскаваторы, ЭО-2621В-3, ЭО-2626, ЭО-2101, ТО-49 | 15040 |
Гидроцилиндр опоры ЦГ-125. 80х400.11 80х400.11 |
Экскаваторы, ЭО-3323А, ЕК-14, ЕК-18 | 28520 |
| Гидроцилиндр отвала ЦГ-100.63х250.11 | Экскаваторы, ЭО-3323А, ЕК-14, ЕК-18 | 16205 |
| Гидроцилиндр отвала ЦГ-100.63х280.11 | Экскаваторы, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | 16233 |
| Гидроцилиндр отвала ЦГ-100.63х310.17-02 | Экскаваторы, E130W, E160W | 20826 |
| Гидроцилиндр отвала ЦГ-80.56х280.11 | Экскаваторы, ЭО-2621А, ЭО-2621В-3, ЭО-2201, ЭО-2203, ЭО-2629 | По запросу |
| Гидроцилиндр открывания ковша ЦГ-80.56х160.11 | Экскаваторы, ЭО-2201, ЭО-2203, Борэкс | По запросу |
| Гидроцилиндр поворота (цепной) ЦГ-80.56х390.12 | Экскаваторы, ЭО-2621 | По запросу |
| Гидроцилиндр поворота 114-45.26.000 правый | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 24639 |
| Гидроцилиндр поворота 114-45.26.000-01 левый | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 24639 |
| Гидроцилиндр поворота ковша 103-45.16.000.1 левый | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Гидроцилиндр поворота ковша 103-45.16.000.1-01 правый | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Гидроцилиндр поворота стрелы ПЭ-048 (реечный) | Экскаваторы, ПЭ-0.8Б, ПЭ-Ф-1А, ПЭ-Ф-1Б | 19506 |
| Гидроцилиндр поворота ЦГ-110.56х140.41 | Экскаваторы, ЭО-2621В-3, ЭО-2626, ЭО-2629, ТО-49 | По запросу |
| Гидроцилиндр поворота ЦГ-110.56х225.41 | Экскаваторы, ЭО-2629, ЭО-2201, ЭО-2203, Борэкс | По запросу |
Гидроцилиндр поворота Э20. 80.022сб-1 80.022сб-1 |
Экскаваторы, ЭО-33211 | 59000 |
| Гидроцилиндр погрузчика ЦГ-80.56х630.11 | Экскаваторы, ЭО-2626, ЭО-2626А, ЭО-2627, ЭО-2628 | По запросу |
| Гидроцилиндр подъема ковша ЦГ-80.56х400.2100.11 | Погрузчики, ТО-49, ДЗ-133 | По запросу |
| Гидроцилиндр подъема рабочего органа ЦГ-110.56х340.41 | Экскаваторы, ЭТЦ-1609 | По запросу |
| Гидроцилиндр подъема рабочего органа ЦГ-110.56х640.41 | Экскаваторы, ЭТЦ-1609 | По запросу |
| Гидроцилиндр подъема рабочего органа ЦГ-110.56х750.41 | Экскаваторы, ЭТЦ-1609 | По запросу |
| Гидроцилиндр подъема стрелы 103-45.15.000 левый | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 18975 |
| Гидроцилиндр подъема стрелы 103-45.15.000-01 правый | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 18975 |
| Гидроцилиндр подъема стрелы ЦГ-100.63х1000.11-01 | Экскаваторы, E130W, E125W | 34265 |
| Гидроцилиндр подъема стрелы ЦГ-125.80х950.11-02 | Экскаваторы, E160W, E180R | 46057 |
| Гидроцилиндр подъема стрелы ЦГ-140.70х1000.11 | Экскаваторы, планировщики UDS-114 | 44559 |
| Гидроцилиндр подъема стрелы, опоры ЦГ-100.60х800.22 (ПЭК-34.000) | Экскаваторы, ПЭ-0.8Б, ПЭ-Ф-1А, ПЭ-Ф-1Б | 17075 |
| Гидроцилиндр рабочего оборудования ЦГ-110.56х1400.11 | Экскаваторы, ЭО-2621 | 19612 |
| Гидроцилиндр рукояти (с подш.) ЦГ-160.100х1250.11 (5221 29-06-000) | Экскаваторы, ЭО-5122, ЭО-5123, ЭО-5124, ЭО-5124А, ЭО-5221, ЭО-5225 | 145134 |
Гидроцилиндр рукояти (с подш. ) ЦГ-160.100х1600.11 (5126 29-08-000) ) ЦГ-160.100х1600.11 (5126 29-08-000) |
Экскаваторы, ЭО-5126 | 159492 |
| Гидроцилиндр рукояти (с подш.) ЦГ-180.125х1400.11 (6123 13-13-000) | Экскаваторы, ЭО-6123 | 250553 |
| Гидроцилиндр рукояти (с подш.) ЦГ-180.125х1700.11 (5124А 29-07-000) | Экскаваторы, ЭО-5124А, ЭО-5225 | 271356 |
| Гидроцилиндр рукояти 114-45.25.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 26904 |
| Гидроцилиндр рукояти 263.01.41.000 | Экскаваторы ЕТ-26 | 103818 |
| Гидроцилиндр рукояти и ковша ЦГ-80.56х900.11 | Экскаваторы, ЭО-2621В-3, ЭО-2626, ТО-49, Автовозы А956М-02, А956М-03 | По запросу |
| Гидроцилиндр рукояти ЦГ-110.80х1100.11 | Экскаваторы, ЕК-12, ЕК-18-40 | 38779 |
| Гидроцилиндр рукояти ЦГ-110.80х1185.11 | Экскаваторы, E130W, E125W | 40410 |
| Гидроцилиндр рукояти ЦГ-125.80х1400.11-02 | Экскаваторы, E160W, E180R | 49563 |
| Гидроцилиндр рукояти ЦГ-125.90х1400.11 | Экскаваторы, ЕК-18 | 49177 |
| Гидроцилиндр рукояти ЦГ-140.100х1392.11-02 (4225А.23.00.000) | Экскаваторы, ЭО-4121, ЭО-4124, ЭО-4224, ЭО-4225, ЭО-4225А | 72502 |
| Гидроцилиндр рукояти ЦГ-140.90х1250.11-01 | Экскаваторы, ЭО-3322Б,ЭО-3326 | 61280 |
| Гидроцилиндр рукояти ЦГ-140.90х1400.11-02 (4121А.23.00.000) | Экскаваторы, ЭО-4121, ЭО-4124, ЭО-4224, МТП-71, EU-422, EU-423 | 73350 |
| Гидроцилиндр рукояти ЦГ-145.100х1460.11 (12.208.0.000-1) | Экскаваторы, ЭО-33211, ЭО-43211 | 143956 |
Гидроцилиндр рукояти ЦГ-150. 105х1650.11 105х1650.11 |
Экскаваторы, ЕК-270 | 124702 |
| Гидроцилиндр рукояти ЦГ-160.110х1500.11 (263.01.41.000) | Экскаваторы, ЕТ-26 | 114227 |
| Гидроцилиндр рукояти, ковша ЦГ-125.80х1000.11 | Экскаваторы, ЭО-3323А, ЭО-3322Б, ЭО-3326 | 36890 |
| Гидроцилиндр рукояти, стрелы, ковша ЦГ-125.80х1100.11 | Экскаваторы, ЕК-14, ЕК-18, ЕТ-18 | 39389 |
| Гидроцилиндр рулевого управления ЦГ-60.30х203.11 (правый) | Экскаваторы, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Гидроцилиндр рулевого управления ЦГ-60.30х203.11-01 (левый) | Экскаваторы, ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Гидроцилиндр стрелы (с подш.) ЦГ-160.100х1250.11 (5221 29-06-000) | Экскаваторы, ЭО-5126 | 145134 |
| Гидроцилиндр стрелы (с подш.) ЦГ-160.100х1400.11 (5221 00-01-000) | Экскаваторы, ЭО-5122, ЭО-5123, ЭО-5124, ЭО-5124А, ЭО-5221, ЭО-5225 | 157990 |
| Гидроцилиндр стрелы (с подш.) ЦГ-180.125х1800.11 (6123 06-05-000) | Экскаваторы, ЭО-6123 | 277683 |
| Гидроцилиндр стрелы 114-45.24.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 36675 |
| Гидроцилиндр стрелы и ковша ЦГ-140.90х1120.11-02 (4225А.23.30.000) | Экскаваторы, ЭО-4125, ЭО-4225, ЭО-4225А | 68367 |
| Гидроцилиндр стрелы и рукояти ЦГ-110.56х900.11 | Экскаваторы, ЭО-2628, ЭО-2629, ЭО-2101, ЭО-2203, Борэкс | 19581 |
| Гидроцилиндр стрелы ЦГ-100.63х1000.11 | Экскаваторы, ЕК-12 | 30355 |
Гидроцилиндр стрелы ЦГ-110. 56х1120.11 56х1120.11 |
Экскаваторы, ЭО-2621В-3, ЭО-2626, ТО-49 | 21143 |
| Гидроцилиндр стрелы ЦГ-110.63х900.11 | Экскаваторы, ТО-49 | 23021 |
| Гидроцилиндр стрелы ЦГ-110.70х1100.11 | Экскаваторы, ЕК-14 | 36815 |
| Гидроцилиндр стрелы ЦГ-125.85х1250.11.000-01сб (12.213.0.000-2) | Экскаваторы, ЭО-33211, ЭО-43211 | 126167 |
| Гидроцилиндр стрелы ЦГ-140.90х1000.11-01 | Экскаваторы, ЭО-3323А | 54971 |
| Гидроцилиндр стрелы ЦГ-140.90х1250.11-02 (4224.23.10.999) | Экскаваторы, ЭО-4121, ЭО-4124, ЭО-4224, МТП-71, EU-422, EU-423, ЕК-270 | 71936 |
| Гидроцилиндр стрелы ЦГ-140.90х920.11-01 | Экскаваторы, ЭО-3323А | 63615 |
| Гидроцилиндр стрелы, ковша 263.01.42.000 | Экскаваторы ЕТ-26 | 97441 |
| Гидроцилиндр стрелы, ковша ЦГ-125.80х1100.11 | Экскаваторы, ЕК-18, ЕТ-18 | 39389 |
| Гидроцилиндр стрелы, ковша ЦГ-125.80х1100.11-01 | Экскаваторы, E160W, E180R | 44084 |
| Гидроцилиндр стрелы, ковша ЦГ-140.100х1245.11 (263.01.42.000) | Экскаваторы, ЕТ-26 | 110759 |
| Гидроцилиндр стрелы, опоры ЦГ-125.80х1000.11 | Экскаваторы, ЭО-3322Б,ЭО-3326,EW-25M1 | 36890 |
| Гидроцилиндр челюстного захвата 103-45.14.000-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Гусеница EU-423.28.06.000 (49*600) | Экскаваторы ЕК-270, EU-423 | По запросу |
| Диск 4225.16.72.002 | Экскаваторы ЭО-4225, ЭО-4225А | По запросу |
Диск 4225. 16.72.011 16.72.011 |
Экскаваторы ЭО-4225, ЭО-4225А | По запросу |
| Дышло 13.1310.000 | Экскаваторы ЭО-2621В-3 | По запросу |
| Зап. части к КПП и мостам вилки, шестерни, фланцы, валы, полумуфты, водило, полуоси, шкворни, цапфа | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Звездочка ЕU-423.27.03.001 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Звездочка ЕU-423.28.01.004 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Звездочка ЕК-270.86.01.001 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Звездочка У60.04.00.003 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Золотник дифференциальный 07.06.400 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Зуб ковша 113-5А-12Б | Экскаваторы ЭО-5122, ЭО-5123, ЭО-5124 | По запросу |
| Зуб ковша 26.5801.405 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Зуб ковша вильчатый 68.01.602 | Экскаваторы ЭО-3323А | По запросу |
| Зуб ковша вставной 40.30.001 | Экскаваторы ЭО-3322, ЭО-3323А | По запросу |
| Зуб ковша кованый 4125.57.60.003 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Карданный вал в ассортименте | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14 | По запросу |
| Карданный вал в ассортименте | Экскаваторы ЕК-18 | По запросу |
Каток опорный 4121. 16.05.000 16.05.000 |
Экскаваторы ЭО-4121 | По запросу |
| Каток опорный 4125.16.66.000 | Экскаваторы ЭО-4124, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Каток опорный 5122 01-13-000-6 | Экскаваторы ЭО-5122, ЭО-5123 | По запросу |
| Каток опорный 5123 01-13-000-1 | Экскаваторы ЭО-5123, ЭО-5124 | По запросу |
| Каток опорный 5225 01-23-000-1 | Экскаваторы ЭО-5126, ЭО-5124 (после 94г.), ЭО-5221, ЭО-5124А | По запросу |
| Каток опорный ЕU-423.28.05.000 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Каток опорный МТП-74.25.05.000 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Каток опорный Э4.01.23.000-1сб | Экскаваторы ЭО-5126 | По запросу |
| Каток поддерживающий 5122 01-14-000 | Экскаваторы ЭО-5122, ЭО-5123 | По запросу |
| Каток поддерживающий 5123 01-14-000 | Экскаваторы ЭО-5123, ЭО-5124, ЭО-5221 (до 94г.) | По запросу |
| Каток поддерживающий 5126 01-14-000 | Экскаваторы ЭО-5126 | По запросу |
| Каток поддерживающий ДУ1-6 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Каток поддерживающий ЕU-423.28.11.000 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Каток поддерживающий Э4.01.14.002сб | Экскаваторы ЭО-5126 | По запросу |
| Клапан А040351.08.01Е.00 | Манипуляторы Инман | По запросу |
| Клапан КПП32Е 00 (КПП 32-250-40 ОСР) | Экскаваторы, ЭО-3323, ЕК-12, ЕК-14, ЕК-18, погрузчик ВП-05 | По запросу |
Клапан обратный 4121. 20.90.000 20.90.000 |
Экскаваторы | По запросу |
| Клапан обратный 5122.09.14.000-1 | Экскаваторы, ЭО-5122, ЭО-5123, ЭО-5124, ЭО-5221, ЭО-5124А, ЭО-5225 | По запросу |
| Клапан перепускной 26.6771.000 | Экскаваторы, ЭО-2621, ЭО-2626, ЭО-2629, ТО-49, ЮМЗ | По запросу |
| Клапан пневмогидравлический 60.05.000 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Клапан предохранительный Е510.20.00 (КП-20-250-40РС) | Экскаваторы | По запросу |
| Клапан предохранительный Е510.20.10 (КП-20-250-400РС) | Экскаваторы, ЭО-3323, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Клапан предохранительный Е510.20.10М (КП-20-250-40 ОСМ) | Строительно-дорожная техника | По запросу |
| Клапан предохранительный Е510.32.00 (КП-32-400-40РС) | Экскаваторы | По запросу |
| Клапан предохранительный Е510.32.10 (КП-32-400-400РС) | Экскаваторы | По запросу |
| Клапан разгрузочный 2202.07.020Е | Экскаваторы, ЭО-2621, ЭО-2626, ЭО-2629, ТО-49 | По запросу |
| Клапан разгрузочный 26.6796.100 | Экскаваторы, ЭО-2621, ЭО-2626, ЭО-2629, ТО-49 | По запросу |
| Клин пика к ГПМ-120 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Клин для гидромолота 11.00.101 | Экскаваторы МГ-300А, СП-71 | По запросу |
| Ковш 0,7 м3 15.10210.000 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Ковш 0.25 м3 13.0801.000 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
Ковш 1. 25, 1.40, 1.50, 1.60, 2.00, 2.50 м 3 25, 1.40, 1.50, 1.60, 2.00, 2.50 м 3 |
Экскаваторы ЭО-5122, ЭО-5123, ЭО-5124, ЭО-5221, ЭО-5124А, ЭО-5225 | По запросу |
| Ковш 114-43.00.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 35825 |
| Ковш 114-43.00.000-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 37383 |
| Ковш 114-43.00.000-02 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 35825 |
| Ковш 114-43.00.000-03 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 37383 |
| Ковш 114-43.50.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 27896 |
| Ковш 114-43.50.000-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 27896 |
| Ковш обратной лопаты 0.65м 3 4225А.57.78.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225 | По запросу |
| Ковш обратной лопаты 1.00м 3 4225А.57.75.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Ковш основной 1.45м 3 5126.15.01.000сб | Экскаваторы ЭО-5126 | По запросу |
| Ковш узкий 0.15 м3 13.3800.000 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Колесо 5122.01.17.014 | Экскаваторы ЭО-5122 | По запросу |
| Колесо ведущее 4124.16.32.006 | Экскаваторы ЭО-4124, ЭО-4224 | По запросу |
| Колесо ведущее 4125.16.62.008 | Экскаваторы ЭО-4225 | По запросу |
| Колесо ведущее 4225.16.72.013 | Экскаваторы ЭО-4225А | По запросу |
| Колесо ведущее 5123 01-02-035 | Экскаваторы ЭО-5123, ЭО-5124 | По запросу |
Колесо ЕU-423. 28.03.130 28.03.130 |
Экскаваторы ЕК-270, EU-423 | По запросу |
| Колесо зубчатое 4121.12.00.006 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225 | По запросу |
| Колесо зубчатое 4124.12.00.061 | Экскаваторы ЭО-4124 | По запросу |
| Колесо зубчатое 4225.12.02.017 | Экскаваторы ЭО-4225А | По запросу |
| Колесо зубчатое 4225.12.02.017-01 (17 зубьев) | Экскаваторы ЭО-4225А | По запросу |
| Колесо зубчатое ЕU-423.56.01.009 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Колесо зубчатое У60.01.00.102 | Экскаваторы МТП-71 | По запросу |
| Колесо зубчатое У60.01.00.151 | Экскаваторы МТП-71 | По запросу |
| Колесо зубчатое У60.01.01.016 | Экскаваторы МТП-71 | По запросу |
| Колесо направляющее 5122 01-10-100 | Экскаваторы ЭО-5122, ЭО-5123 | По запросу |
| Колесо направляющее 5123 01-10-100-6 | Экскаваторы ЭО-5123, ЭО-5124 | По запросу |
| Колесо направляющее 5126 01-10-100 | Экскаваторы ЭО-5126, ЭО-5124А, ЭО-5225 | По запросу |
| Колесо направляющее 5221 01-10-100 | Экскаваторы ЭО-5221 | По запросу |
| Колесо натяжения с механизмом сдавания 5126.01.10.000сб | Экскаваторы ЭО-5126 | По запросу |
| Колесо натяжн. с мех. сдавания Э4.01.10.000сб | Экскаваторы, ЭО-5126 | По запросу |
| Колесо натяжное в сб. Э4.01.10.009сб | Экскаваторы, ЭО-5126 | По запросу |
Колесо натяжное в сборе 4125. 16.64.100 16.64.100 |
Экскаваторы ЭО-4124, ЭО-4224, ЭО-4225 | По запросу |
| Колесо натяжное в сборе 4227.16.24.100 | Экскаваторы ЭО-4225А | По запросу |
| Колесо натяжное ЕU-423.28.03.000 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Коллектор ЕU-423.28.21.100 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Коллектор центральный Э20.01.06.001сб | Экскаваторы ЭО-33211 | По запросу |
| Колодка тормозная 70.20.200 | Экскаваторы, ЭО-3323 | По запросу |
| Комплект втулок 26.21 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Комплект карданных болтов (12+4) | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Комплект литых траков EU-422.00.04.000-01 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Комплект ножей (3 шт.) 03.5501.013 | Экскаваторы ЭО-2621В-3 | По запросу |
| Комплект пальцев ЭО-2621, ЭО-2626 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Комплект сварных траков EU-422.00.00.910 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Комплект уплотнений для гидроцилиндра 103-45.14.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Комплект уплотнений для гидроцилиндра 103-45.15.000(-01) | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Комплект уплотнений для гидроцилиндра 103-45.16.000(-01) | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
Комплект уплотнений для гидроцилиндра 114-45.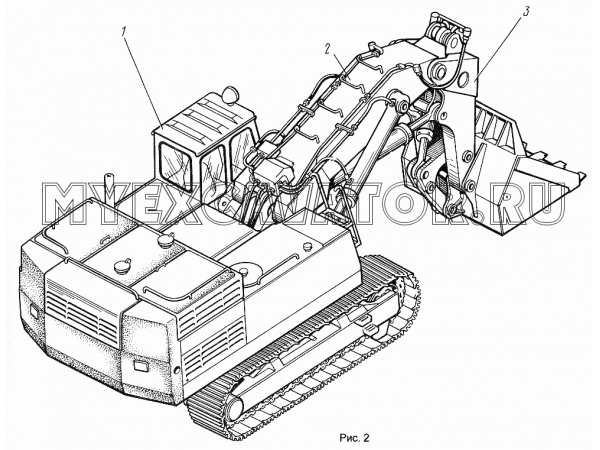 10.000(-01, 02,-03) 10.000(-01, 02,-03) |
Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Комплект уплотнений для гидроцилиндра 114-45.17.000(-01) | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Комплект уплотнений для гидроцилиндра 114-45.18.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Комплект уплотнений для гидроцилиндра 114-45.19.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Комплект уплотнений для гидроцилиндра 114-45.20.000(-01) | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Комплект уплотнений для гидроцилиндра 114-45.21.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Коронка 23.21.001 | Экскаваторы ЕК-14, ЕК-18, ЕТ-18 | По запросу |
| Коронка 23.21.201 | Экскаваторы ЕК-12 | По запросу |
| Коронка 25.15.001 | Экскаваторы ЕТ-25 | По запросу |
| Коронка 5124А 15-03-003 | Экскаваторы ЭО-5124А (после 99г.), ЭО-5225 | По запросу |
| Коронка 5221 15-01-011 | Экскаваторы ЭО-5123, ЭО-5124, ЭО-5225, ЭО-5124А (до 99г.) | По запросу |
| Коронка 5221.15.01.011 | Экскаваторы, ЭО-5126 | По запросу |
| Корпус 20.50.012 | Экскаваторы ЭО-3323А | По запросу |
| Корпус 72.51.008 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
Корпус в сборе 20. 50.800р 50.800р |
Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Корпус в сборе 72.51.200 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| КПП без гидромотора 20.50.000 | Экскаваторы ЭО-3323А | По запросу |
| КПП без гидромотора 72.51.000 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14 | По запросу |
| Крышка 4111А.10.01.01.006 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Крышка 4111Г.10.51.00.011 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Лента гусеничная 4121.16.06.000 | Экскаваторы ЭО-4121 | По запросу |
| Лента гусеничная 4124.16.37.000 | Экскаваторы ЭО-4124, ЭО-4224 | По запросу |
| Лента гусеничная 4124.16.37.000-003 | Экскаваторы ЭО-4225, ЭО-4225А | По запросу |
| Маслоохладитель Э4.11.25.001сб | Экскаваторы, ЭО-5126 | По запросу |
| Механизм натяжения ЕК-270.86.19.000 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Механизм передвижения EU-423.00.00.920 (без гидромотора) | Экскаваторы ЕК-270, EU-423 | По запросу |
| Механизм передвижения EU-423.00.00.920-02 (без гидромотора) | Экскаваторы ЕК-270, EU-423 | По запросу |
| Механизм передвижения EU-423.28.01.000 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Механизм передвижения EU-423.28.01.000-02 | Экскаваторы ЕК-270, EU-423 | По запросу |
Механизм передвижения ЕК-270. 86.01.000-01 86.01.000-01 |
Экскаваторы ЕК-270, EU-423 | По запросу |
| Механизм передвижения У60.01.00.000-02 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Механизм передвижения У60.01.00.000-03 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Механизм поворота 4125.85.00.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225 | По запросу |
| Механизм поворота 4225.12.02.000 | Экскаваторы ЭО-4225А | По запросу |
| Механизм поворота EU-423.56.00.000 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Механизм поворота без гидромотора 03.30.000 | Экскаваторы ЭО-3322, ЭО-3323А, ЕК-18 | По запросу |
| Механизм поворота без гидромотора 07.00.000 | Экскаваторы ЭО-3323А, ЕК-12 | По запросу |
| Механизм поворота ЕК-270.56.00.000-011 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Механизм сдавания 5123 01-10-500 | Экскаваторы ЭО-5123, ЭО-5124 | По запросу |
| Механизм сдавания 5221 01-10-500 | Экскаваторы ЭО-5221 | По запросу |
| Моноблочная стрела 4125.26.50.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Мост передний Э20.01.04.001сб | Экскаваторы ЭО-33211 | По запросу |
| Муфта 26.5430.014 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Муфта 4125.11.00.800 | Экскаваторы ЭО-4124, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
Муфта EU-423. 28.01.008 28.01.008 |
Экскаваторы ЕК-270, EU-423 | По запросу |
| Муфта кулачковая 652.071.00.13 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Муфта кулачковая 652Б.072.004 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Навесное оборудование ДЗ-133 (бульдозер-погр.) | Экскаваторы ковш 0,40м3 | По запросу |
| Навесное оборудование УМТ-80 (плужно-щеточн.) | Экскаваторы | По запросу |
| Навесное оборудование ЭО-2621В-3 (экскаватор) | Экскаваторы ковш 0,25м3 | По запросу |
| Навесное оборудование ЭО-2626 (экскаватор-погр.) | Экскаваторы ковш 0,25 0,50м3 | По запросу |
| Наконечник в сборе 71.40.400 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Наконечник в сборе для гидроцилиндра поворота колес 20.40.303 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Натяжное устройство У60.04.00.000 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Нож 655х12х150 | Трактора, Экскаваторы, МТЗ, ЮМЗ | По запросу |
| Нож 655х12х180 квадратные болты | Трактора, Экскаваторы, ЭО-2621 | По запросу |
| Нож 655х12х180 профиль | Трактора, Экскаваторы, ЭО-2621 | По запросу |
| Нож 655х12х180 прямой | Трактора, Экскаваторы, ЭО-2621 | По запросу |
| Нож 655х14х180 | Трактора, Экскаваторы, ЭО-2621 | По запросу |
| Нож 655х16х180 | Трактора, Экскаваторы, ЭО-2621 | По запросу |
| Нож 655х16х180 квадратные болты | Трактора, Экскаваторы, ЭО-2621 | По запросу |
| Нож 655х20х180 | Трактора, Экскаваторы, ЭО-2621 | По запросу |
Опора поворотная Э4. 03.02.001сб 03.02.001сб |
Экскаваторы, ЭО-5126 | По запросу |
| Опора шкворня ДЗ-122.557.02.00.004 | Автогрейдеры, ДЗ-122 | По запросу |
| Опорно-поворотное устройство ОПРУ-1400 | Экскаваторы, ЕК-18 | По запросу |
| Опорно-поворотное устройство ОПУ-1250.01.02.400 | Экскаваторы, ЕК-12, ЕК-14 | По запросу |
| Ось 114-00.00.001 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.002 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.003 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.100 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.100-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.200 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.300-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.300-02 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.300-03 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.300-04 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось 114-00.00.300-05 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
Ось 114-00. 00.320 00.320 |
Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Ось в сборе 4125.01.00.150 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Ось О-50х400 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Ось О-65х134 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Отвал 26.5551.000 | Экскаваторы ЭО-2621В-3 | По запросу |
| Палец 21.50.020 | Экскаваторы ЭО-3323, ЕК-12, ЕК-14 | По запросу |
| Палец 21.50.110 | Экскаваторы ЕК-18 | По запросу |
| Палец 23.50.010.000 | Экскаваторы ЭО-3323 | По запросу |
| Палец 23.50.020.000 | Экскаваторы ЭО-3323 | По запросу |
| Палец 23.50.030.000 | Экскаваторы ЭО-3323 | По запросу |
| Палец 23.50.050 | Экскаваторы ЭО-3323 | По запросу |
| Палец 23.50.060 | Экскаваторы ЭО-3323 | По запросу |
| Палец 23.50.080.000 | Экскаваторы ЭО-3323 | По запросу |
| Палец 23.50.090.000 | Экскаваторы ЭО-3323 | По запросу |
| Палец 25.50.020 | Экскаваторы ЕТ-25 | По запросу |
| Палец 25.50.030.000 | Экскаваторы ЕТ-25 | По запросу |
| Палец 25.50.070.000 | Экскаваторы ЕК-18 | По запросу |
| Палец 4125.01.00.100.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
Палец 4125. 02.00.100 02.00.100 |
Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец 4125.02.00.150.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец 4125.02.00.200 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец 4125.02.00.250 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец 4125.02.00.300.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец 4125.02.00.350 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец 4125.02.00.400 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец 4125.02.00.450 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Палец П-23.50.040 | Экскаваторы ЭО-3323 | По запросу |
| Палец П-30х183 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-40х125 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-40х153 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-40х227 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-40х325-01 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-40х65 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х135 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х137 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х193 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х206 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х260 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х292 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х353 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-50х478 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-60х192 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
| Палец П-70х167 | Экскаваторы ЭО-2621, ЭО-2626 | По запросу |
Передача главная 20. 31.000 31.000 |
Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Пневмогидроаккумулятор 640.01 (ПГА с гидроклапанами) | Экскаваторы ЭО-3323А | По запросу |
| Пневмогидроаккумулятор 640.021 (ПГА с гидроклапанами) | Экскаваторы ЕК-12, ЕК-14, ЕК-18, ЕТ-14, ЕТ-16, ЕТ-18 | По запросу |
| Поворотная колонка 13.0310.001 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Подогреватель Э4.11.18.001сб-1 | Экскаваторы, ЭО-5126 | По запросу |
| Подшипник 10-404440 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Подшипник 10-455050 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Подшипник 10-505550 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Подшипник 10-657060 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Подшипник PRMF 404440 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Подшипник PRMF 455045 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Подшипник PRMF 505550 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Подшипник PRMF 606530 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Полумуфта 20.50.015 | Экскаваторы ЭО-3323А | По запросу |
| Полумуфта 26.5430.002 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
Полумуфта 72. 51.012 51.012 |
Экскаваторы ЭО-3323А | По запросу |
| Полумуфта EU-423.18.02.003 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Полумуфта ЕК-270.20.12.001 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Привод насоса 26.5430.000 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Проушина гидроцилиндра Д-110 (М42х2) | Экскаваторы ЕК-14 | По запросу |
| Пружина Э4.09.06.003 | Экскаваторы, ЭО-5126 | По запросу |
| Пружина Э4.09.06.004 | Экскаваторы, ЭО-5126 | По запросу |
| Радиатор водяной Э4.11.22.001сб-1 | Экскаваторы, ЭО-5126 | По запросу |
| Радиатор масляный Э4.11.22.017сб-1 | Экскаваторы, ЭО-5126 | По запросу |
| Рама (трактор МТЗ ЮМЗ) 13.0120.000 | Экскаваторы ЭО-2621В-3 | По запросу |
| Рама 14.0201.000 | Экскаваторы ЭО-2626 | По запросу |
| РВД 8 комплект (28шт.) | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Регулятор потока жидкости 14.1100.200 | Экскаваторы ЭО-2626 | По запросу |
| Редуктор 5122 01-17(18)-000-2 | Экскаваторы ЭО-5122, ЭО-5123, ЭО-5124 | По запросу |
| Редуктор 5126 11-08-000 (без насоса) | Экскаваторы ЭО-5126, ЭО-5124А (до 99г.) | По запросу |
| Редуктор 5225 11-08-000 | Экскаваторы ЭО-5124А (после 99г.), ЭО-5225 | По запросу |
Редуктор EU-423. 56.01.000 56.01.000 |
Экскаваторы ЕК-270, EU-423 | По запросу |
| Редуктор поворота 5225 03-01-000 | Экскаваторы ЭО-5221, ЭО-5124А, ЭО-5225 | По запросу |
| Редуктор поворота 5225 03-02-000 | Экскаваторы ЭО-5221, ЭО-5124А, ЭО-5225 | По запросу |
| Редуктор поворота EU-423.00.00.910-01 (без гидромотора) | Экскаваторы ЕК-270, EU-423 | По запросу |
| Редуктор поворота платформы Э4.03.01.100сб-1 | Экскаваторы, ЭО-5126 | По запросу |
| Редуктор раздаточный Э4.11.08.000сб-1 (без насоса) | Экскаваторы, ЭО-5126 | По запросу |
| Редуктор хода 4125.16.62.000 левый | Экскаваторы ЭО-4124, ЭО-4224, ЭО-4225 | По запросу |
| Редуктор хода 4125.16.63.000 правый | Экскаваторы ЭО-4124, ЭО-4224, ЭО-4225 | По запросу |
| Редуктор хода 4225.16.72.000 | Экскаваторы ЭО-4225А | По запросу |
| Редуктор хода без гидромотора Э4.01.17.100сб-1 | Экскаваторы ЭО-5126 | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-110.70/1-ЕП | Ковш, стрела На гц 110/70 производства Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-110.70/1-СП | Ковш На гц 110/70 производства Спецгидравлика (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-110.70/1а-ТП | Ковш, стрела На гц 110/70 производства Твэкс (до 02г) (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-110.70/1б-ТП | Ковш, стрела На гц 110/70 производства Твэкс (02-03гг) (полный) | По запросу |
Ремкомплект РК-ЕК/ЕТ14-110.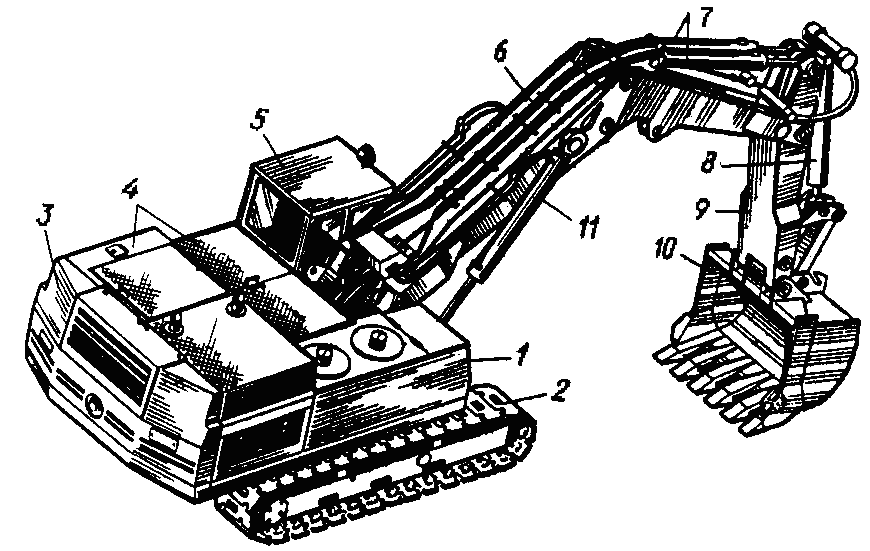 70/1в-ТП 70/1в-ТП |
Ковш, стрела На гц 110/70 производства Твэкс (с 07г) (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-110.70/2-ЕП | Ковш, стрела На гц 110/70 производства Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-110.70/2-ТП | Ковш, стрела На гц 110/70 производства Твэкс (04-06гг) (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-125.90/1-ЕП | Рукоять На гц 125/90 производства Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-125.90/1а-ТП | Рукоять На гц 125/90 производства Твэкс (до 02г) (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-125.90/1б-ТП | Рукоять На гц 125/90 производства Твэкс (02-03гг) (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-125.90/1в-ТП | Рукоять На гц 125/90 производства Твэкс (с 07г) (полный) | По запросу |
| Ремкомплект РК-ЕК/ЕТ14-125.90/2-ТП | Рукоять На гц 125/90 производства Твэкс (04-06гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1-СП | Отвал, опоры На гц 100/63 производства Спецгидравлика (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1,2б-ТП | Ковш, стрела, отвал (Универс-ый с 07г) На гц 100/63 производства Твэкс (с 07г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1,2у-ТП | Ковш, стрела, отвал (Универс-ый с 04г) На гц 100/63 производства Твэкс (с 04г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1а-ЕП | Опоры, ковш, стрела На гц 100/63 производства Елецгидроагрегат (полный) | По запросу |
Ремкомплект РК-ЕК12-100. 63/1а-ТП 63/1а-ТП |
ЕК-12. Гидроцилиндр опоры (до 2002 г), ковша, стрелы производства Твэкс (до 02г) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1б-ЕП | Отвал На гц 100/63 производства Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1б-ТП | ЕК-12. Гидроцилиндр ковша, стрелы производства Твэкс (02-03гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1в-ТП | Ковш, стрела, отвал На гц 100/63 производства Твэкс (07-08гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1г-ТП | Отвал На гц 100/63 производства Твэкс (до 04г) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/1у-ЕП | Ковш, стрела, отвал, опоры (Универс.) На гц 100/63 производства Елецгидроагрегат (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/2а-ТП | ЕК-12. Гидроцилиндр ковша, стрелы,отвала (пр-ва Твэкс (04-06гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-100.63/2б-ТП | Ковш, стрела, отвал На гц 100/63 производства Твэкс (с 09г) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/1-ЕП | ЕК-12-20. Гидроцилиндр рукояти. производства Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/1,2б-ТП | ЕК-12-20. Гидроцилиндр рукояти. (пр-ва Твэкс (с 07г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/1,2у-ТП | ЕК-12-20. Гидроцилиндр рукояти. производства Твэкс (с 04г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/1а-ТП | ЕК-12-20. Гидроцилиндр рукояти. (пр-ва Твэкс (до 02г) (полный) (пр-ва Твэкс (до 02г) (полный) |
По запросу |
| Ремкомплект РК-ЕК12-110.70/1б-ТП | ЕК-12-20. Гидроцилиндр рукояти. (пр-ва Твэкс (02-03гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/1в-ТП | ЕК-12-20. Гидроцилиндр рукояти. (пр-ва Твэкс (07-08гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/2-ЕП | ЕК-12-20. Гидроцилиндр рукояти. производства Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/2а-ТП | ЕК-12-20. Гидроцилиндр рукояти. (пр-ва Твэкс (04-06гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.70/2б-ТП | ЕК-12-20. Гидроцилиндр рукояти. (пр-ва Твэкс с 2009 года) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.80/1-ЕП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.80/1,2б-ТП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Твэкс (с 07г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.80/1,2у-ТП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Твэкс (с 04г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.80/1а-ТП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Твэкс (до 02г) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.80/1б-ТП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Твэкс (02-03гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.80/1в-ТП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Твэкс (07-08гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-110.80/2-ЕП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Елецгидроагрегат (полный) (пр-ва Елецгидроагрегат (полный) |
По запросу |
| Ремкомплект РК-ЕК12-110.80/2а-ТП | ЕК-12. Гидроцилиндр рукояти. (пр-ва Твэкс (04-06гг) (полный) | По запросу |
| Ремкомплект РК-ЕК12-125.80/1-ЕП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК12-125.80/1-СП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва Спецгидравлика (полный) | По запросу |
| Ремкомплект РК-ЕК12-125.80/1,2б-ТП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва Твэкс (с 07г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-125.80/1,2у-ТП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва Твэкс (с 04г) (Универсальный) (полный) | По запросу |
| Ремкомплект РК-ЕК12-125.80/1а-ТП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва ТВЭКС до 2002 года) | По запросу |
| Ремкомплект РК-ЕК12-125.80/1б-ТП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва ТВЭКС 2002-2003 гг) | По запросу |
| Ремкомплект РК-ЕК12-125.80/1в-ТП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва ТВЭКС 2007-2008 гг) | По запросу |
| Ремкомплект РК-ЕК12-125.80/2а-ТП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва ТВЭКС 2004-2006 гг) | По запросу |
| Ремкомплект РК-ЕК12-125.80/2б-ТП | ЕК-12-20. Гидроцилиндр стрелы, складывания (пр-ва ТВЭКС с 2009 г) | По запросу |
| Ремкомплект РК-ЕК12-60.30/1-ТП | Поворот колёс На гц 60/30 производства Твэкс (полный) | По запросу |
| Ремкомплект РК-ЕК12-БУ/3-ТП | Блок управления 13. 80.04.400…940 На блок управления производства Твэкс 80.04.400…940 На блок управления производства Твэкс |
По запросу |
| Ремкомплект РК-ЕК12-Г/3-ТП | Гидрораспред-ль 520 На гидрораспределитель производства Твэкс | По запросу |
| Ремкомплект РК-ЕК12-К/3-ТП | Коллектор (7 каналов) На центральный коллектор производства Твэкс | По запросу |
| Ремкомплект РК-ЕК12-ПГА/3-ТП | Пневмогидроаккумулятор На пневмогидроаккумулятор с гидроклапанами производства Твэкс | По запросу |
| Ремкомплект РК-ЕК14-100.63/1а-ТП | Опоры (до 02г) На гц 100/63 производства Твэкс (до 02г) (полный) | По запросу |
| Ремкомплект РК-ЕК14-100.63/1в-ТП | Отвал На гц 100/63 производства Твэкс (с 07г) (полный) | По запросу |
| Ремкомплект РК-ЕК14-100.63/1г-ТП | Отвал На гц 100/63 производства Твэкс (до 04г) (полный) | По запросу |
| Ремкомплект РК-ЕК14-100.63/2-ТП | Отвал На гц 100/63 производства Твэкс (04-06гг) (полный) | По запросу |
| Ремкомплект РК-ЕК14-125.80/1-ЕП | Стрела, опоры На гц 125/80 производства Елецгидроагрегат (полный) | По запросу |
| Ремкомплект РК-ЕК14-125.80/1-СП | Опоры На гц 125/80 производства Спецгидравлика (полный) | По запросу |
| Ремкомплект РК-ЕК14-125.80/1а-ТП | Опоры На гц 125/80 производства Твэкс (до 02г) (полный) | По запросу |
| Ремкомплект РК-ЕК14-125.80/1б-ТП | Опоры На гц 125/80 производства Твэкс (02-03гг) (полный) | По запросу |
| Ремкомплект РК-ЕК14-125.80/1в-ТП | Опоры На гц 125/80 производства Твэкс (с 07г) (полный) | По запросу |
Ремкомплект РК-ЕК14-125. 80/2-ТП 80/2-ТП |
Опоры На гц 125/80 производства Твэкс (04-06гг) (полный) | По запросу |
| Ремкомплект РК-ЕК8-100.63/1б-ТП | ЕК-8. Гидроцилиндр ковша, рукояти (пр-ва ТВЭКС) | По запросу |
| Ремкомплект РК-ЕК8-110.70/1б-ТП | ЕК-8. Гидроцилиндр стрелы, складывания (пр-ва ТВЭКС) | По запросу |
| Ремкомплект РК-ЕК8-63.63/1-ТП | ЕК-8. Гидростабилизатор на гидрораспределитель (пр-ва ТВЭКС) | По запросу |
| Ремкомплект РК-ЕК8-80.40/1б-ТП | ЕК-8. Гидроцилиндр отвала (пр-ва ТВЭКС) | По запросу |
| Ремкомплект РК-ЕК8-80.50/1б-ТП | ЕК-8. Гидроцилиндр поворота колес (пр-ва ТВЭКС) | По запросу |
| РК-ЕК/ЕТ14-Г/3-ТП ремкомплект | Гидрораспределитель ГР-520.00 производства Твэкс | По запросу |
| РК-ЕК/ЕТ14-К/3-ТП ремкомплект | Коллектор (7 каналов) На центральный коллектор производства Твэкс | По запросу |
| РК-ЕК14-100.100/1-ТП | Ремкомплект колес на ЕК-14 | По запросу |
| РК-ЕК14-100.63/1-СП ремкомплект | Отвал, опоры На гц 100/63 производства Спецгидравлика (полный) | По запросу |
| РК-ЕК14-100.63/1а-ЕП ремкомплект | Опоры На гц 100/63 производства Елецгидроагрегат (полный) | По запросу |
| РК-ЕК14-100.63/1б-ЕП ремкомплект | Отвал На гц 100/63 производства Елецгидроагрегат (полный) | По запросу |
| РК-ЕК14-60.30/1-ТП ремкомплект | Поворот колёс ЕК-14 На гц 60/30 производства Твэкс (полный) | По запросу |
| РК-ЕК14-БУ/3-ТП ремкомплект | Блок управления 13. 80.04.400…940 На блок управления производства Твэкс 80.04.400…940 На блок управления производства Твэкс |
По запросу |
| РК-ЕК14-ПГА/3-ТП ремкомплект | Пневмогидроаккумулятор На пневмогидроаккумулятор с гидроклапанами производства Твэкс | По запросу |
| РК-ЕК18-100.63/1-ЕП ремкомплект | Отвал На гц 100/63 производства Елецгидроагрегат (полный) | По запросу |
| РК-ЕК18-100.63/1-СП ремкомплект | Отвал, опоры На гц 100/63 производства Спецгидравлика (полный) | По запросу |
| РК-ЕК18-100.63/1в-ТП ремкомплект | Отвал На гц 100/63 производства Твэкс (с 07г) (полный) | По запросу |
| РК-ЕК18-100.63/1г-ТП ремкомплект | Отвал На гц 100/63 производства Твэкс (до 04г) (полный) | По запросу |
| РК-ЕК18-100.63/2-ТП ремкомплект | Отвал На гц 100/63 производства Твэкс (04-06гг) (полный) | По запросу |
| РК-ЕК18-125.80/1-ЕП ремкомплект | Ковш, стрела, опоры На гц 125/80 производства Елецгидроагрегат (полный) | По запросу |
| РК-ЕК18-125.80/1-СП ремкомплект | Опоры На гц 125/80 производства Спецгидравлика (полный) | По запросу |
| РК-ЕК18-125.80/1а-ТП ремкомплект | Ковш, стрела, опоры На гц 125/80 производства Твэкс (до 02г) (полный) | По запросу |
| РК-ЕК18-125.80/1б-ТП ремкомплект | Ковш, стрела, опоры На гц 125/80 производства Твэкс (02-03гг) (полный) | По запросу |
| РК-ЕК18-125.80/1в-ТП ремкомплект | Ковш, стрела, опоры На гц 125/80 производства Твэкс (с 07г) (полный) | По запросу |
| РК-ЕК18-125.80/2-ТП ремкомплект | Ковш, стрела, опоры На гц 125/80 производства Твэкс (04-06гг) (полный) | По запросу |
РК-ЕК18-125.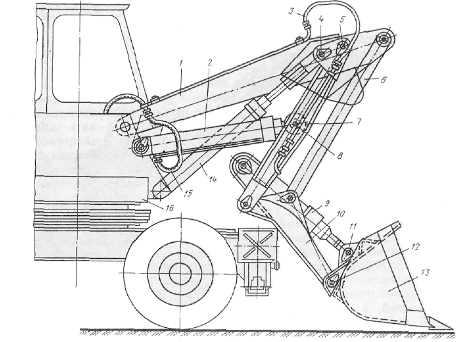 90/1-ЕП ремкомплект 90/1-ЕП ремкомплект |
Рукоять На гц 125/90 производства Елецгидроагрегат (полный) | По запросу |
| РК-ЕК18-125.90/1а-ТП ремкомплект | Рукоять На гц 125/90 производства Твэкс (до 02г) (полный) | По запросу |
| РК-ЕК18-125.90/1б-ТП ремкомплект | Рукоять На гц 125/90 производства Твэкс (02-03гг) (полный) | По запросу |
| РК-ЕК18-125.90/1в-ТП ремкомплект | Рукоять На гц 125/90 производства Твэкс (с 07г) (полный) | По запросу |
| РК-ЕК18-125.90/2-ТП ремкомплект | Рукоять На гц 125/90 производства Твэкс (04-06гг) (полный) | По запросу |
| РК-ЕК18-60.30/1-ТП ремкомплект | Поворот колёс ЕК-18 На гц 60/30 производства Твэкс (полный) | По запросу |
| РК-ЕК18-БУ/3-ТП ремкомплект | Блок управления 13.80.04.400…920-20 На блок управления производства Твэкс | По запросу |
| РК-ЕК18-Г/3-ТП ремкомплект | Гидрораспред-ль 520 На гидрораспределитель производства Твэкс | По запросу |
| РК-ЕК18-К/3-ТП ремкомплект | Коллектор (7 каналов) На центральный коллектор производства Твэкс | По запросу |
| РК-ЕК18-ПГА/3-ТП ремкомплект | Пневмогидроаккумулятор На пневмогидроаккумулятор с гидроклапанами производства Твэкс | По запросу |
| РК-ЕТ14-100.100/1-ТП ремкомплект | Колесо ЕТ-14, ЕК-16, ЕК-18 На гц натяжения гусеницы производства Твэкс (до 08г) (полный) | По запросу |
| Рукав высокого давления (РВД 12.LF М22х1,5 -24.610-0-90) | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
Рукоять 13. 0701.000 0701.000 |
Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Рукоять 4225А.30.65.000 | Экскаваторы ЭО-4121, ЭО-4224, ЭО-4225, ЭО-4225А | По запросу |
| Рычаг 114-46.60.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Рычаг 114-46.60.000-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Рычаг регулировочный 20.30.500 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Скоба 114-00.00.012 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Стойка опорного башмака 37.0211.000А | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Стопор коронки 23.21.040 | Экскаваторы ЕК-14-18 | По запросу |
| Стопор коронки 23.21.260 | Экскаваторы ЕК-12 | По запросу |
| Стрела 13.0601.000 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Стрела ЕК-270.02.04.000 | Экскаваторы ЕК-270, EU-423 | По запросу |
| Стяжка для гидромолота 03.31.038 | Экскаваторы МГ-300А, СП-71 | По запросу |
| Суппорт 20.30.800 (левый) | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Суппорт 20.30.900 (правый) | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Сухарь для гидромолота 11.00.002 | Экскаваторы МГ-300А, СП-71 | По запросу |
| Трак литой МТП-74.00.04.001 | Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
Трак сварной EU-422. 27.07.020 27.07.020 |
Экскаваторы МТП-71, EU-421, EU-422 | По запросу |
| Тяга 114-46.50.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 15293 |
| Тяга 114-46.50.000-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | 16426 |
| Тяга верхняя в сборе 71.40.200 | Экскаваторы ЭО-3323А, ЕК-12 | По запросу |
| Тяга поперечная 71.40.300 (буксировочная в сборе) | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Тяга поперечная в сборе 20.40.300 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Тяга поперечная Э20.80.002сб | Экскаваторы ЭО-33211 | По запросу |
| Угольник Э4.09.17.094сб | Экскаваторы, ЭО-5126 | По запросу |
| Фильтр сетчатый Э4.05.31.006сб | Экскаваторы, ЭО-5126 | По запросу |
| Фильтр Э4.05.31.010сб | Экскаваторы, ЭО-5126 | По запросу |
| Фильтроэлемент R130 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Фильтроэлемент МF 0060D010BN3HC | Экскаваторы, Экскаватор «КранЭкс» ЕК-270 | По запросу |
| Фильтроэлемент МF 0850R010BN3HC | Экскаваторы, Экскаватор «КранЭкс» | По запросу |
| Фильтроэлемент МF CDM 101 CD1 | Экскаваторы, Экскаватор «ТВЭКС», «Ковровец», Автокраны, Автокран «Ивановская марка», Daewoo 170 5ser | По запросу |
| Фильтроэлемент МF CRC 410 FV1 | Экскаваторы, Экскаватор Ковровец | По запросу |
| Фильтроэлемент МF CRE 030 CD1 | Экскаваторы, Экскаватор «Интер-Дон», Погрузчики, Погрузчик «Амкодор» | По запросу |
| Фильтроэлемент МF MSZ303BMNB | Экскаваторы, ЕК-12, ЕК-14, ЕК-18, MANITOU (ML, MT), Liebherr (LTM) | По запросу |
| Фильтроэлемент МF MSZ403BMNB | Экскаваторы, ЕК-12, ЕК-14, ЕК-18 | По запросу |
Центральный коллектор 4225А. 16.78.400 16.78.400 |
Экскаваторы ЭО-4225, ЭО-4225А | По запросу |
| Центральный коллектор 6 и 7 канальный | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Цилиндр тормозной 114-45.10.000 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Цилиндр тормозной 114-45.10.000-01 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Цилиндр тормозной 114-45.10.000-02 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Цилиндр тормозной 114-45.10.000-03 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Шарнир 114-45.03.400 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Шарнир угловой 1387 VI | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Шестерня 03.00.013 (12 зуб.) | Экскаваторы ЭО-3323А | По запросу |
| Шестерня 03.30.033 (18 зуб.) | Экскаваторы ЭО-3323А | По запросу |
| Шестерня 114-21.00.003 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Шестерня 114-21.00.004 | Коммунальная техника, Экскаватор-погрузчик ДЭМ-114 | По запросу |
| Шестерня 20.50.003 | Экскаваторы ЭО-3323А | По запросу |
| Шестерня 20.50.004 | Экскаваторы ЭО-3323А | По запросу |
| Шестерня 20.50.005 | Экскаваторы ЭО-3323А | По запросу |
Шестерня 20. 50.025 50.025 |
Экскаваторы ЭО-3323А | По запросу |
| Шестерня 20.50.034 | Экскаваторы ЭО-3323А | По запросу |
| Шестерня 225.01.07.00.008 | Экскаваторы | По запросу |
| Шестерня 26.5430.003 | Экскаваторы ЭО-2621В-3, ЭО-2626 | По запросу |
| Шестерня 5122 03-02-005 | Экскаваторы ЭО-5122, ЭО-5123, ЭО-5124, ЭО-5221, ЭО-5124А, ЭО-5225 | По запросу |
| Шестерня 652.033.001 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Шестерня 652.071.01.2 | Экскаваторы, Донэкс, ЭО-4111 | По запросу |
| Шестерня 72.51.037 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14 | По запросу |
| Шестерня 72.51.038 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14 | По запросу |
| Шестерня 72.51.039 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14 | По запросу |
| Шестерня 72.51.040 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14 | По запросу |
| Шестерня ведущая (хвостовик) 20.31.100 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Шестерня Э4.03.01.017 | Экскаваторы, ЭО-5126 | По запросу |
| Шестерня Э4.11.08.025 | Экскаваторы, ЭО-5126 | По запросу |
| Шкворень 20.30.039 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Шкворень 20.30.040 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Шкив тормозной 70.20.023 | Экскаваторы ЭО-3323А, ЕК-12, ЕК-14, ЕК-18 | По запросу |
| Наименование | Индекс | Масса | Цена |
| Каталог | Гидроцилиндры, гидрорули, РВД производства ОАО «Елецгидроагрегат» | 0.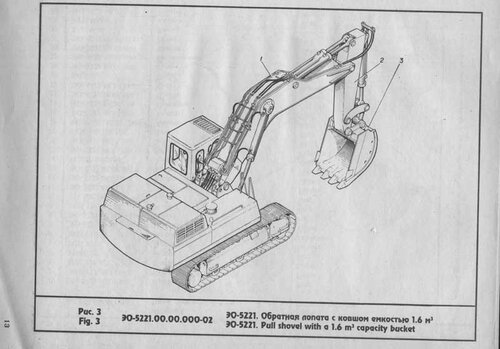 350 350 | |
| Каталог | Насосы шестеренные, насосы подпитки, гидрораспределители производства ЗАО «Гидропривод» (Кореновск) | 0.070 | |
| Каталог | Экскаваторы ЭО-5124 (ВЭКС) | 0.350 | |
| Каталог | Экскаваторы ЭО-5126 (УВЗ) | 0.350 | |
| Каталог | Экскаваторы ЭО-4121, ЭО-4124 («Ковровец») | 0.350 | |
| ТО и инструкция по эксплуатации | Экскаваторы ЭО-4124 («Ковровец») | 0.300 | |
| Каталог | Экскаваторы ЭО-4225 («Ковровец») | 0.350 | |
| ТО и инструкция по эксплуатации | Экскаваторы ЭО-4225 («Ковровец») | 0.300 | |
| ТО и инструкция по эксплуатации | Экскаваторы ЭО-4225А («Ковровец») | 0.300 | |
| Каталог | Экскаваторы ЭО-4225А-07 («Ковровец») | 0.350 | |
| Каталог | Экскаваторы EU-423 («Кранэкс») | 0.060 | |
| Каталог | Экскаваторы ЭО-3323А (ТВЭКС) | 0.150 | |
| ТО и инструкция по эксплуатации | Экскаваторы ЭО-3323А (ТВЭКС) | 0.200 | |
| Каталог | Экскаваторы ЭО-2621В-3 («Сарэкс») | 0.120 | |
| Каталог | Тракторы К-700А, К-701 («Кировец») | 0.450 | |
| Каталог | Тракторы Т-170 (ЧТЗ) | 0.300 | |
| Каталог | Бульдозеры Т-10 (ЧТЗ) | 0.700 | |
| Каталог | Бульдозеры ДЭТ-250, ДЭТ-250М2 (ЧТЗ) | 0.600 | |
| Каталог | Автогрейдеры ДЗ-98 («Завод Колющенко») | 0.600 | |
| Каталог | Погрузчики ТО-18Б, ТО-28 («Амкодор») | 0. 400 400 | |
| Каталог | Погрузчики ТО-18А («Амкодор») | 0.200 | |
| Каталог | Погрузчики ТО-18Д («Амкодор») | 0.200 | |
| Каталог | Погрузчики ТО-28А («Амкодор») | 0.200 | |
| Каталог | Погрузчики ТО-18Б3 («Амкодор») | 0.200 | |
| Каталог | Погрузчики ТО-49 («Амкодор») | 0.200 | |
| Каталог | Погрузчики ТО-30, ПК-2202, ПК-2703 (ОАО «Погрузчик» (Орел)) | 0.350 | |
| Каталог | Гидравлика производства ОАО «Пневмостроймашина» (полноцветный, мелованная бумага) | 0.350 | |
| Описание | Гидравлика производства ОАО «Пневмостроймашина» (черно-белый вариант каталога) | 0.300 | |
| Каталог | «Строительные и дорожные машины» (полноцветное издание РИА «Россбизнес» («ОэС-1»)) | 0.500 | |
| Каталог | «Коммунальная и дорожная техника» (полноцветное издание РИА «Россбизнес» («ОэС-1»)) | 0.700 | |
| Каталог | «Грузовик.RU» (полноцветное издание РИА «Россбизнес» («ОэС-1»)) | 0.350 | |
| Каталог | «Нефть + газ техника» (полноцветное издание РИА «Россбизнес» («ОэС-1»)) | 0.350 | |
| Каталог | «Горная + шахтная техника» (полноцветное издание РИА «Россбизнес» («ОэС-1»)) | 0.350 | |
| Каталог | «Коммунальная техника — 2001» («ОэС-1») | 0.150 |
Дистанционное зондирование | Бесплатный полнотекстовый | Создание одного экскаватора как препятствия в C-пространстве для предотвращения столкновений при дистанционном управлении двумя экскаваторами с использованием датчиков положения
1.
 Введение
ВведениеВ типичном экскаваторе используется гидравлический привод и регулируемое навесное оборудование, поэтому возможности его применения безграничны. По этой причине его можно широко использовать во многих областях, таких как строительство, горнодобывающая промышленность и сельское хозяйство, а также в более опасных местах для спасательных и восстановительных работ. Обратите внимание, что экскаватор часто используется в областях, где требуется совместная работа нескольких экскаваторов.Иногда может потребоваться сотрудничество, например, поднятие предмета или перемещение предмета. Однако эти факторы могут создать некоторые опасные ситуации, такие как непредсказуемое столкновение с каждым экскаватором, что является одной из самых распространенных аварий со смертельным исходом. Чтобы предотвратить такие типы несчастных случаев, операторы, пешеходы и менеджеры должны поддерживать визуальную осведомленность, чтобы избежать столкновений и предупреждать об опасности во время вождения и манипулирования экскаватором. Поэтому в последние годы растет спрос на системное управление для управления безопасностью.Кроме того, фактор безопасности постепенно стал важным моментом, поскольку в последнее время появилась тенденция к разработке беспилотных роботизированных экскаваторов.
Было много способов уменьшить вероятность столкновения в таких опасных ситуациях. К сожалению, в условиях плохой работы сенсорных систем в существующих решениях были обнаружены некоторые локальные проблемы. Точность этих проблем могла бы быть снижена, если бы окружающие условия были плохими, такими как помехи от установки многих устройств или слишком много непредсказуемых частиц.В отличие от прошлого, сегодня существует множество крупных разработок систем предупреждения и предупреждения. Более того, по сравнению с предлагаемым методом в этих системах есть некоторые существенные отличия. Почти все из них в первую очередь ориентированы на сторону рабочих-пеших и экскаваторов-одиночек.
Предлагаемый метод подробно описывает, как один типичный экскаватор может быть численно выражен как препятствие в C-пространстве по отношению к стороне другого экскаватора. Он будет ориентирован не только на рабочих, но и на самих экскаваторов.Препятствия создаются в трех определенных типах C-пространства в виде изображений, чтобы их можно было использовать в качестве дополнительного индекса для рабочих или нескольких роботизированных экскаваторов, позволяющих более точно избежать столкновения.
Он будет ориентирован не только на рабочих, но и на самих экскаваторов.Препятствия создаются в трех определенных типах C-пространства в виде изображений, чтобы их можно было использовать в качестве дополнительного индекса для рабочих или нескольких роботизированных экскаваторов, позволяющих более точно избежать столкновения.
Прежде всего, этот метод основан на кинематической информации, которую можно измерить и дать. Следовательно, в случае роли индекса предлагаемый метод может использоваться независимо или в сочетании с существующими решениями по предупреждению и обнаружению с использованием широко используемых сенсорных устройств.Это причина, по которой в данной статье был разработан метод, основанный на кинематике, для достижения цели. Поскольку совместимость и универсальность применения будут выше, многие решения и устройства, основанные на кинематике, были разработаны и широко используются.
В настоящее время широко используются датчики GPS и инерциального измерительного блока (IMU) для управления машиной и управления ею. Поэтому для сбора кинематической информации и демонстрации предлагаемого метода использовались устройства GPS и IMU.Решение в реальном времени зависит от технических характеристик датчиков и системы связи. В документ также будут включены параметры, относящиеся к временной области.
Кроме того, в течение некоторого времени изучались многие решения для дистанционного управления беспилотными роботизированными экскаваторами. Тривиально, было бы лучше, если бы предложенный метод применялся к системе дистанционного управления, когда задействовано несколько экскаваторов.
Краткое содержание этой статьи выглядит следующим образом. В разделе 2 будет описан анализ предыдущих работ.В Разделе 2 будет подробно описана значимость основного вклада этой статьи. Математические выводы предлагаемого метода будут объяснены в Разделе 3, и он будет проверен с помощью моделирования в Разделе 4. Раздел 5 покажет фактические тесты и результаты, а эта статья закончится обсуждением и заключением в последнем разделе. .
.2. Обзор литературы
Предотвращение столкновений — очень важный фактор в сотрудничестве строительных машин, а также совместных роботизированных систем.В робототехнике многие методы планирования движения или траектории для предотвращения столкновений нескольких роботов-манипуляторов уже изучены в течение некоторого времени. Например, эти работы в [1,2,3,4,5,6,7,8,9,10] объясняют методы планирования траектории и движения для предотвращения столкновений. В этих статьях есть два основных момента. Во-первых, создание препятствий в C-пространстве является необходимым условием для предотвращения столкновений. Другой — то, что препятствия должны быть созданы в C-пространстве для движения или планирования пути.Таким образом, также был изучен способ эффективного создания препятствий. Ge вывел уравнения границ совместных препятствий для плоских роботов [11]. Дули также описал препятствия в суставном пространстве для робота с замкнутой цепью 5R [12]. Браницки изучил метод быстрого вычисления препятствий конфигурационного пространства [13]. В интерактивной методологии Ньюман разработал преобразование пространства конфигурации в реальном времени [14]. В настоящее время Пан [15] разработал метод построения оптимальной конфигурации.Конечно, было проведено много исследований о системах предупреждения о сближении и предотвращении столкновений для планирования пути совместных тяжелых машин. Другие статьи по применению в строительстве будут рассмотрены в следующем абзаце.
GPS используется в горнодобывающей промышленности для повышения безопасности за счет предотвращения столкновений. Антонио и Руфф разработали систему безопасности на основе GPS [16,17,18,19]. Рафф также изучил основанную на радаре систему предупреждения о сближении для внедорожных самосвалов [20].Камат представил исследование, в котором изучалась реализация быстрого интерактивного метода обнаружения столкновений [21]. Определение приближения с помощью радиочастотного модуля было разработано Марксом [22,23]. Эта система экономична и имеет широкий спектр применения. В случае использования магнитных материалов компания Teizer разработала технологию обнаружения приближения магнитного поля и оповещения для безопасной работы [24]. Головина разработала метод предотвращения столкновений пешеходов со строительной техникой путем создания тепловых карт [25].Ван представил новый подход к уменьшению количества ложных тревог за счет использования четырехмерного пространства [26]. Был разработан метод без использования сенсорных устройств. Сивакумар и Али изучали планирование пути без столкновений совместных манипуляторов крана, используя кинематическую информацию с помощью эвристического или генетического алгоритма [27,28]. Сивакумар и Али использовали конфигурационное пространство, чтобы избежать столкновений. Примечательно также, что C-Space является одним из важных элементов предотвращения столкновений на строительных площадках. Использование C-пространства в области построения можно найти в следующих статьях [29,30].Также легко найти системы безопасности, применяемые в экскаваторах. Технология RFID использовалась для предотвращения столкновений [31,32]. Teizer в основном использовал радиочастоты (RF), обнаружение света и дальность (LIDAR) и данные о местоположении для реализации автономной проактивной системы реального времени [33]. Проект визуализации осведомленности о рисковых ситуациях с использованием дополненной реальности (AR) был предложен Су [34]. Вахдатихаки предложил создать карту рисков с учетом видимости и близости опасностей с использованием информации позы и моделирования в режиме, близком к реальному времени [35].Шен спроектировал опасную зону вокруг строительного оборудования, в которой не должен находиться персонал во время работы [36]. Гонон применил метод потенциального поля, чтобы избежать столкновений при управлении экскаватором [37]. Однако рассмотренный метод оставлял желать лучшего. Прежде всего, нет методологии предотвращения столкновений, которые касаются нескольких экскаваторов во время совместной работы.
Эта система экономична и имеет широкий спектр применения. В случае использования магнитных материалов компания Teizer разработала технологию обнаружения приближения магнитного поля и оповещения для безопасной работы [24]. Головина разработала метод предотвращения столкновений пешеходов со строительной техникой путем создания тепловых карт [25].Ван представил новый подход к уменьшению количества ложных тревог за счет использования четырехмерного пространства [26]. Был разработан метод без использования сенсорных устройств. Сивакумар и Али изучали планирование пути без столкновений совместных манипуляторов крана, используя кинематическую информацию с помощью эвристического или генетического алгоритма [27,28]. Сивакумар и Али использовали конфигурационное пространство, чтобы избежать столкновений. Примечательно также, что C-Space является одним из важных элементов предотвращения столкновений на строительных площадках. Использование C-пространства в области построения можно найти в следующих статьях [29,30].Также легко найти системы безопасности, применяемые в экскаваторах. Технология RFID использовалась для предотвращения столкновений [31,32]. Teizer в основном использовал радиочастоты (RF), обнаружение света и дальность (LIDAR) и данные о местоположении для реализации автономной проактивной системы реального времени [33]. Проект визуализации осведомленности о рисковых ситуациях с использованием дополненной реальности (AR) был предложен Су [34]. Вахдатихаки предложил создать карту рисков с учетом видимости и близости опасностей с использованием информации позы и моделирования в режиме, близком к реальному времени [35].Шен спроектировал опасную зону вокруг строительного оборудования, в которой не должен находиться персонал во время работы [36]. Гонон применил метод потенциального поля, чтобы избежать столкновений при управлении экскаватором [37]. Однако рассмотренный метод оставлял желать лучшего. Прежде всего, нет методологии предотвращения столкновений, которые касаются нескольких экскаваторов во время совместной работы. В первую очередь речь идет о случаях, которые могут возникнуть между экскаваторами и рабочими или другими транспортными средствами, а не с каждым экскаватором.Кроме того, многие решения были основаны в первую очередь на системах технического зрения. Статьи Масталли и Вахдатихаки являются примерами [38,39]. Тем не менее, некоторые вычислительные процессы должны быть включены для генерации точных и необходимых данных в совместное пространство для реализации планирования.
В первую очередь речь идет о случаях, которые могут возникнуть между экскаваторами и рабочими или другими транспортными средствами, а не с каждым экскаватором.Кроме того, многие решения были основаны в первую очередь на системах технического зрения. Статьи Масталли и Вахдатихаки являются примерами [38,39]. Тем не менее, некоторые вычислительные процессы должны быть включены для генерации точных и необходимых данных в совместное пространство для реализации планирования.Предлагаемый метод посвящен вещам, которые можно использовать для предотвращения столкновений при совместной работе нескольких экскаваторов. Другими словами, как описано ранее, его можно использовать для индекса систем наведения при предотвращении столкновений.Это также большой потенциал в качестве дополнительного инструмента, если он используется с существующими решениями.
3. Методология
Каждый экскаватор должен распознавать другие как препятствия для предотвращения столкновений во время совместной работы, чтобы обеспечить безопасность в широком рабочем пространстве. Поскольку этот метод предназначен только для нескольких экскаваторов, в этом разделе подробно описывается, как один экскаватор может быть численно выражен как препятствие по отношению к стороне другого экскаватора. Для создания препятствий было выбрано разнообразное C-пространство, включая пространство суставов, с учетом применения роботов.Численные вычисления, основанные на геометрическом подходе с кинематикой, будут использоваться на протяжении всей фазы вывода.
Предлагаемый метод будет объяснен на основе следующих условий и допущений.
Цель, которая должна быть выражена как препятствие, — это просто обычный экскаватор. Остальные, такие как неизвестный мусор, исключаются, потому что он становится бессмысленным объектом в вычислениях.
Два экскаватора распознают друг друга как препятствия.Однако с этого момента целевой экскаватор, который будет препятствием, будет называться «A», так что «B» распознает экскаватор A как препятствие.

Будет использоваться только кинематическая информация. Следовательно, положение двух экскаваторов должно быть известным, заданным и измеримым.
Методика разделена на две части: при движении и при манипулировании стрелой, рукоятью, ковшом и поворотом.
Все ссылки и тело обрабатываются как сегменты для вычислений.
3.1. Создание препятствий для управления движением
Два экскаватора произвольно расположены на земле на рисунке 1. Когда один экскаватор работает далеко от другого, тривиально, им не нужно учитывать положение другого. В противном случае оператор должен управлять экскаватором для предотвращения столкновения, учитывая положение другого экскаватора. Во время движения один экскаватор «B» должен знать точную зону расположения другого экскаватора «A», который может быть вовлечен в столкновение. ситуация.Следовательно, R2 выбран для выражения сгенерированного препятствия в C. C означает C-пространство. Система координат Универсальной поперечной проекции Меркатора (UTM) особенно используется для отражения условий строительства и наблюдения за состоянием экскаваторов с высоты птичьего полета. C задается следующим образом:R2 = {(x, y) | x∈ [0, inf) × y∈ [0, inf)}
.(1)
где × означает декартово произведение.Изображение препятствия в R2 предназначено для управления движением, что означает заданное положение, при котором другой экскаватор может вызвать столкновение, если его центр расположен без каких-либо манипуляций со стрелой, рукоятью и ковшом.
Восемь параметров необходимы для создания препятствия. Они следующие.
Положение центра кабины.
Длина от центра кабины до конечной точки экскаватора, когда все звенья ортогонально проецируются на R2.
Искусственный полигон вокруг звена для обеспечения запаса прочности.
Угол рыскания звеньев относительно системы координат UTM, включая кабину (кузов).

EBT = cϕA0sϕAxA0100 − sϕA0cϕAzA0001
(2)
где ϕA = θpitch, A + θboom, A + θstick, A + θbucket, A и cϕA = cos (ϕA), sϕA = sin (ϕA),xA = l1, Acos (θpitch, A) + l2, Acos ( θpitch, A + θboom, A) + l3, Acos (θpitch, A + θboom, A + θstick, A) + l4, Acos (θpitch, A + θboom, A + θstick, A + θbucket, A)
zA = l1, Asin (θpitch, A) + l2, Asin (θpitch, A + θboom, A) + l3, Asin (θpitch, A + θboom, A + θstick, A) + l4, Asin (θpitch, A + θboom, A + θstick, A + θbucket, A)
Длина от центра кабины до конечной точки экскаватора A, которая ортогонально проецируется на R2, может быть получена следующим образом: где dA связано с экскаватором A, а l1, A, l2, A, l3, A и l4, A могут быть показаны на рисунке 2.Во-вторых, необходимо определить еще один параметр, касающийся угла рыскания звеньев, включая кабину, чтобы можно было построить все диапазоны. Уравнение (4) рассматривает определенный параметр следующим образом (это также описано на рисунке 1):θA, i = {2π (i − 1m) | i = 1,2,… m − 1, m, m + 1}
(4)
Например, если m равно 10, то θA, 1 = 0, θA, 6 = πrad и θA, 11 = 2πrad. Уравнение (3) необходимо определить снова, как и уравнение (4) для создания препятствий. Это делается в следующем уравнении (оно также описано на рисунке 1).dA, j = {dA (j − 1n) | j = 1,2,… n − 1, n, n + 1}
(5)
Например, если n равно 10, то dA, 1 = 0, dA, 6 = dA2 и dA, 11 = dA. Буква «A» в уравнениях (2–5) относится к экскаватору A. Следующий шаг доступен при предположении, что заданы все параметры, которые будут использоваться для создания экскаватора A в качестве препятствия в R2, которые взяты из уравнений (2). — (5). Экскаватор А стационарный. Математический набор положений n-точек на звене под определенным углом рыскания может быть выражен как R2, уравнение (6).
— (5). Экскаватор А стационарный. Математический набор положений n-точек на звене под определенным углом рыскания может быть выражен как R2, уравнение (6).(xA, j, yA, j) = xA, 0 + dA, jcos (θA, k), yA, 0 + dA, jsin (θA, k) | j = 1,2,… n − 1, n, n +1
(6)
где k ∈ m — конкретное значение угла рыскания, а (xA, 0, yA, 0) ∈R2 — положение центра кабины, показанное на рисунке 1. Для создания экскаватора A в качестве препятствия относительно для экскаватора B для лучшего предотвращения столкновений был учтен дополнительный параметр «η». Скаляр «η» связан с параметром длины, который может зависеть от ширины ковша или кабины. Таким образом, чтобы преобразовать «η» в вектор для включения его в декартово пространство, ηA, j переопределяется как переведенные точки, которые являются результатом сдвига точек (xA, n, yA, n).Рисунок 3 сделан для ясного понимания. «Η» относится только к ширине. Применяя матрицу вращения, ηA, j можно получить следующим образом:ηA, j: = (xs, j, ys, j) = Rz (θA, k) [xA, j, yA, j ± ηA, 0] T
(7)
(xs, j, ys, j) = {xA, jcos (θA, k) — (yA, j ± ηA) sin (θA, k), xA, jsin (θA, k) + (yA, j ± ηA) cos (θA, k) | j = 1,2,… n − 1, n, n + 1}
(8)
где R — матрица вращения, а + означает, что переведенная точка находится слева от ссылки. Знак — обозначает, когда переведенная точка находится справа.Следовательно, конечная точка другого экскаватора B не должна быть близко к точке (xs, j, ys, j), чтобы избежать столкновения с A.
Уравнения (1) — (6) также могут применяться к экскаватору B, который распознает экскаватор A как препятствие. Точка контакта между конечной точкой экскаватора B и точкой (xs, j, ys, j) экскаватора A может быть получена с помощью уравнения (9).(xA, 0 + xs, j = xB, 0 + дБ, jcosθA, k ′, yA, 0 + ys, j = yB, 0 + дБ, jsinθB, k ′)
(9)
Чтобы получить более четкое представление о концепциях, на Рисунке 4 это показано визуально.Точка (xB, 0, yB, 0), вычисленная по уравнению (9), представляет собой положение, в котором произойдет столкновение между B и A в определенной позиции, где находится центр кабины экскаватора B. Учитывая все доступные позы B, которые можно было принять, 𝒞𝒪x, y∈R2 определяется как уравнение (10). CO означает сгенерированное препятствие в C-пространстве.
Учитывая все доступные позы B, которые можно было принять, 𝒞𝒪x, y∈R2 определяется как уравнение (10). CO означает сгенерированное препятствие в C-пространстве.𝒞𝒪x, y = {(xA, 0 + xs, j − dB, jcosθB, i) × (yA, 0 + ys, j − dB, jsinθB, i) | i = 1,2,… m − 1, m, m + 1 и j = 1,2,… n − 1, n, n + 1}
(10)
Следовательно, зона, свободная от столкновений, в C-пространстве становится уравнением (11).Cfree = C − 𝒞𝒪x, y = R2 − 𝒞𝒪x, y
(11)
3.2. Создание препятствий для навигации при манипулировании стрелой экскаватора
В этом разделе будет объяснен другой метод создания препятствия для предотвращения столкновений во время работы стрелы, рукояти, ковша и поворота во время простоя.
Обычно оператор напрямую управляет четырьмя гидравлическими приводами экскаватора, управляя двумя джойстиками двумя руками. Следовательно, для оператора будет лучше безопасно управлять экскаватором, если СО находится ближе к стыковому пространству.В отличие от Раздела 3.1, другой CO, описанный в Разделе 3.2, означает, что диапазон каждого угла сочленения, которого должен избегать экскаватор, включает стрелу, рукоять, ковш и поворотные сочленения.Во-первых, этап определения диапазона угла поворота, которого следует избегать, выглядит следующим образом.
- Вернитесь к уравнению (10) для конкретного угла рыскания экскаватора A.
дБ, ncosθB, i = {xA, 0 − xB, 0 + xs, j | j = 1,2,… n− 1, n, n + 1} и
дБ, nsinθB, i = {yA, 0 − yB, 0 + ys, j | j = 1,2,… n − 1, n, n + 1}
дБ, nsinθB, idB, ncosθB, i = tanθB, i = {yA, 0 − yB, 0 + ys, jxA, 0 − xB, 0 + xs, j | j = 1,2,…, n − 1, n, n + 1}
𝒞𝒪i = j (θB) = atan {yA, 0 − yB, 0 + ys, jxA, 0 − xB, 0 + xs, j | i = j = 1,2,… n − 1, n, n + 1}
(12)
Затем набор ортогонально проецируемых длин на R2 экскаватора B, вызывающих столкновение с экскаватором A, может быть получен путем подстановки уравнения (12) в дБ, ncosθB, i или дБ, nsinθB, i. Результат выражается как 𝒞𝒪j (дБ) следующим образом.
Результат выражается как 𝒞𝒪j (дБ) следующим образом.𝒞𝒪j (дБ) = {xA, 0 − xB, 0 + xs, jcos (COi = j (θB)) | i = j = 1,2,… n − 1, n, n + 1} или 𝒞𝒪j (дБ) = {yA, 0 − yB, 0 + ys, jsin (COi = j (θB)) | i = j = 1,2,… n − 1, n, n + 1}
(13)
На этом этапе изображение препятствия, нарисованное уравнениями (12) и (13), может быть индексом, который оператор может использовать для справки.Например, если оператор управляет сочленением экскаватора B для удовлетворения требований в дБ, j <𝒞𝒪j (дБ), он доступен для предотвращения столкновений. В этом случае, когда используются только два набора, 𝒞𝒪i = j (θB) и 𝒞𝒪j (дБ), C для создания препятствия может быть определено уравнением (14).S2 = [0,2π) × [0, дБ) = {(θ, d) | θ∈ [0,2π), d∈ [0, дБ)}
(14)
Следовательно, первый СО, связанный с манипуляцией стрелой экскаватора, — это уравнение (15).𝒞𝒪θ, d = {COi = j (θB), COj (дБ) | i = j = 1,2,… n − 1, n, n + 1}
(15)
где 𝒞𝒪θ, d∈S2 Чтобы создать препятствие по отношению к пространству шарнира стрелы, рукояти и ковша для его детального распознавания, в S3 необходимо представить 𝒞𝒪j (дБ).S3 определяется как уравнение (16).S3 = [- π, π) × [−π, π) × [−π, π) = {(θ1, θ2, θ3) | θ1, θ2, θ3∈ [−π, π)}
(16)
Чтобы создать изображение препятствия в S3, необходимо вычислить обратную кинематику относительно 𝒞𝒪j (дБ). Это начинается с определенного значения координаты конечной точки экскаватора.
Применяя уравнение (3), дБ становится xB. Обычно оператор сосредотачивается на манипулировании стрелой, рукоятью и звеньями ковша для выемки грунта, а не на движении. Следовательно, в обратной кинематике следует исключить наклон корпуса и звено кузова.Поскольку эти параметры влияют на дБ, модифицированная общая длина, ортогонально проецируемая на S2, определяется как уравнение (17).дБ ′ = xB ′ = xB − l1, Bcos (θpitch, B) = l2, Bcos (θpitch, B + θboom, B) + l3, Bcos (θpitch, B + θboom, B + θstick, B) + l4, Bcos (θpitch, B + θboom, B + θstick, B + θbucket, B)
(17)
Далее, для применения общего данного решения об обратной кинематике простого плоского трехзвенного манипулятора, необходимо еще раз изменить dB ′ [40]. Уравнение (18) касается модифицированного параметра.где xB ″ = l2, Bcos (θpitch, B + θboom, B) + l3, Bcos (θpitch, B + θboom, B + θstick, B) В предположении, что задана конкретная точка (xB ″, zB ″), результаты обратной кинематики для экскаватора B представлены в следующих уравнениях:
Уравнение (18) касается модифицированного параметра.где xB ″ = l2, Bcos (θpitch, B + θboom, B) + l3, Bcos (θpitch, B + θboom, B + θstick, B) В предположении, что задана конкретная точка (xB ″, zB ″), результаты обратной кинематики для экскаватора B представлены в следующих уравнениях:θBoom, B = β ± ψ − θpitch, B
(19)
где β = Atan2 (zB ″ xB ″), 0 <ψ = arccos (xB ″ 2 + zB ″ 2 + l2, B2 − l3, B22l2, BxB ″ 2 + zB ″ 2) <π2. Знак минус горит, когда θpitch, B> 0.θstick, B = Атан2 (s2c2)
(20)
где c2 = xB ″ 2 + zB ″ 2 − l2, B2 − l3, B22l2, Bl3, B и s2 = ± 1 − c22.θbucket, B = −θboom, B − θstick, B
(21)
Ориентация ϕB устанавливается равной нулю. Β и ψ отмечены на рисунке 4. Наконец, уравнения (19) — (21) должны применяться к 𝒞𝒪j (дБ). Однако получить обратную кинематику непросто, поскольку 𝒞𝒪j (дБ) — это не заданное значение координаты, а набор ортогонально проецируемой длины. Следовательно, если все возможные точки координат могут быть преобразованы в j (дБ) с помощью ортогональной проекции, будет получена вся обратная кинематика относительно данного 𝒞𝒪j (дБ).Значение β ограничено путем определения его, как в уравнении (23).βB, i = {π2 (i − 1m) | i = 1,2,… m − 1, m, m + 1}
(22)
Следовательно, уставка, которая должна быть подставлена в уравнения (19) и (20), может быть определена как уравнение (23).(xB ″, ij, zB ″, ij) = {(xB, 0 + COj (дБ ″) cosβB, i) × (zB, 0 + COj (дБ ″) sinβB, i) | i = 1,2,… m − 1, m, m + 1 и j = 1,2,… n − 1, n, n + 1}
(23)
Для более ясного понимания, (xB ″, ij, zB ″, ij) также проиллюстрировано на рисунке 5. Наборы, с которыми экскаватор B должен избегать угла сочленения, вызывающего столкновение с экскаватором A, выражены следующими уравнениями:𝒞𝒪ij (θboom, B) = {βB, i ± ψB, ij − θpitch, B}
(24)
где c2, ij = arccos (xB ″, ij2 + zB ″, ij2 + l2, B2 − l3, B22l2, BxB ″, ij2 + zB ″, ij2)𝒞𝒪ij (θstick, B) = Atan2 (s2, ijc2, ij)
(25)
где c2, ij = xB ″, ij2 + zB ″, ij2 − l2, B2 − l3, B22l2, Bl3, B и s2, ij = ± 1 − c2, ij2𝒞𝒪ij (θbucket, B) = — 𝒞𝒪ij (θboom, B) −𝒞𝒪ij (θstick, B)
(26)
Множества, состоящие из ij (θbucket, B), 𝒞𝒪ij (θboom, B) и 𝒞𝒪ij (θstick, B), могут быть сгенерированы на S3. Изображение препятствия, созданное на C вокруг суставного пространства, определяется как Уравнение (27):
Изображение препятствия, созданное на C вокруг суставного пространства, определяется как Уравнение (27):𝒞𝒪θ3 = {COij (θboom, B), COij (θstick, B), COij (θbucket, B) | ij = i × j}
(27)
где 𝒞𝒪θ3∈S3 Если включено качание, 𝒞𝒪i = j (θB), 𝒞𝒪θ3∈S3 может быть изменено, как в уравнении (28).𝒞𝒪θ4 = {COi = j (θB), COθ3 | ij = i × j}
(28)
Значение i в 𝒞𝒪i = j (θB) должно быть меньше или равно, чем в 𝒞𝒪θ3.
4. Моделирование
Моделирование проводилось с использованием графического пользовательского интерфейса (GUI) MATLAB.Пользовательский интерфейс включает в себя то, что одно — это графическое выражение, а другое — матрицы для отображения числовых выражений. Результаты моделирования разделены на две части: управление стрелой экскаватора и манипулирование ею. Код можно найти в [41].Случай столкновения нескольких экскаваторов будет включен в раздел моделирования для проверки математической модели. Потому что на самом деле экспериментировать с физическими столкновениями непросто.
4.1. Результаты моделирования создания препятствий для управления автомобилем с целью предотвращения столкновения
Параметры моделирования для создания препятствий для управления движением описаны в Таблице 1 и Таблице 2. Параметр η был установлен равным 0,1 (м). Показано созданное препятствие в R2 на рисунке 6. Тяги корпуса, стрелы, ковша и рукояти отображаются разными цветами, а внешние и внутренние пунктирные круги указывают максимальное рабочее пространство и текущее рабочее пространство соответственно. Метки dA, dB и 𝒞𝒪x, y отмечены в Рисунок 6.Метка зоны предупреждения указывает 𝒞𝒪x, y, которые точка (xB, 0, yB, 0) экскаватора B не должна занимать. Правое изображение на Рисунке 6 показывает, когда экскаватор «B» находится в зоне предупреждения. Если бы «B» совершил поворот против часовой стрелки без регулировки длины, столкновение, очевидно, произошло бы. Форма зоны предупреждения, которая образуется вокруг экскаватора А, состоит из множества точек. На рисунках 7 и 8 показаны матрицы размером 100 на 100, примерно равные 𝒞𝒪x, y из значений m и n, выбранных равными 100. В обоих отмечены два красных блока.Эти записи указывают значение координаты положения тела «B», которое (xB, 0, yB, 0) отмечено на левом изображении рисунка 6.
На рисунках 7 и 8 показаны матрицы размером 100 на 100, примерно равные 𝒞𝒪x, y из значений m и n, выбранных равными 100. В обоих отмечены два красных блока.Эти записи указывают значение координаты положения тела «B», которое (xB, 0, yB, 0) отмечено на левом изображении рисунка 6.4.2. B. Результаты моделирования создания препятствий для управления манипуляцией стрелой для предотвращения столкновения
Параметры настройки для моделирования создания препятствий при манипулировании стрелой экскаватора описаны в таблице 3. Параметры положения экскаватора такие же, как в таблице 1, однако xB, 0 и yB, 0 различны. Рисунок 9 представляет собой результирующую диаграмму с созданным изображением препятствия в S2.Есть три случая. Во-первых, если угол рыскания экскаватора B больше 180 °, а дБ равен 3,91, произойдет столкновение. Во-вторых, напротив, дБ равен 3,22. Таким образом, во втором случае экскаватор может вращаться в любом месте без столкновения. В-третьих, столкновение произошло. дБ составляет 4,01, а угол рыскания — 162 °. Звездная точка находится на изображении препятствия. Изображение препятствия на рисунке 9 получается из следующих условных множеств: {(x, y) | x <{𝒞𝒪i = j (θB)} ∩y> {𝒞𝒪j (dB)}}, где (x, y) ⊂S2 Рисунок 10 содержит две матрицы 29 на 1 о 𝒞𝒪i = j (θB) и 𝒞𝒪j (дБ) от m и n, выбранных равными 29.На рисунке 11 показан результирующий график сгенерированного изображения препятствия в (x, y, z) ∈S3, который состоит из множества точек. Стрела θ, B, θstick, B и θbucket, B не должны использоваться во избежание столкновения. В частности, звездочка на изображении препятствия сделана значимо для проверки. Это произошло из-за третьего столкновения. Все сочленения находятся в зоне, в которой их не должно быть. Рисунки 12, 13 и 14 представляют собой матрицы размером 29 на 29 вокруг ij (θboom, B), 𝒞𝒪ij (θstick, B) и 𝒞𝒪ij (θbucket, B) соответственно, из m и n выбраны равными 29.Более подробные объяснения относительно 𝒞𝒪θ3 будут описаны в разделе экспериментов и результатов.
5. Эксперименты и результаты
5.1. Экспериментальная установка: датчики, система связи, экскаваторы
Для демонстрации была разработана выделенная станция удаленной кабины для дистанционного управления несколькими экскаваторами. Эта система позволяет одному оператору одновременно управлять несколькими экскаваторами. Используя эту систему, можно оценить предложенный метод с точки зрения практической полезности.Оператор может ссылаться на создаваемые препятствия через пользовательский интерфейс на этой станции, управляя несколькими экскаваторами.
Эта станция может отправлять командный сигнал через модули беспроводной связи, а также контролировать целевой объект через беспроводную IP-камеру. Если оператор посылает командный сигнал, манипулятор, прикрепленный к экскаватору, будет работать для выполнения выемки грунта. Прежде всего, все данные, измеренные IMU и глобальными навигационными спутниковыми системами (GNSS), всегда передаются на станцию кабины пилота в каждом цикле настройки.В этом случае весь период процесса был установлен на 100 мс, включая задержку, синхронизацию и протоколы связи. Более того, графический интерфейс пользователя (GUI) использует собранные данные для создания препятствий.
На самом деле экскаватор — это не скоростной автомобиль. Хорошо известная средняя скорость движения типичного экскаватора составляет 2 ~ 3 км / ч, или 0,6 ~ 0,8 м / с, и угловые скорости каждого угла также измерялись для отражения в пользовательском интерфейсе. Результат усреднения угловой скорости равен 0.35рад / с. Следовательно, достаточно быть в режиме онлайн, допустив цикл передачи между системами датчиков равным 100 мс. Временное и пространственное разрешение для представления в пользовательском интерфейсе может быть получено в замкнутой форме с учетом перемещения и угловой скорости сустава. Как уже упоминалось, поскольку весь период процесса был установлен равным 100 мс, 10 точек будут генерироваться каждую единицу секунды. Если бы скорость перемещения и угловые скорости были определены как Vxym / s и qjrad / s, соответственно, разрешение точек, которые должны быть созданы в C-пространстве, было бы 10Vxypoints / m или 10qjpoints / rad.Другими словами, если скорость выше, количество точек на единицу, которая будет создана в C-пространстве, будет меньше. В случае средней скорости экскаватора разрешение может составлять около 17 точек / м и 28 точек / рад.
Если бы скорость перемещения и угловые скорости были определены как Vxym / s и qjrad / s, соответственно, разрешение точек, которые должны быть созданы в C-пространстве, было бы 10Vxypoints / m или 10qjpoints / rad.Другими словами, если скорость выше, количество точек на единицу, которая будет создана в C-пространстве, будет меньше. В случае средней скорости экскаватора разрешение может составлять около 17 точек / м и 28 точек / рад.
 Характеристики сенсорной системы для измерения положения машины очень похожи на те, которые использовались в экспериментах в этой статье. Два экскаватора были размещены на асфальтовом покрытии. Причина, по которой был выбран рисунок 16, заключается в том, что такая близость может продемонстрировать замечательную силу предлагаемого метода. Для регистрации данных была установлена система связи Controller Area Network (CAN).Наконец, параметр η был установлен равным 0,1 (м) во всех случаях. Дополнительный полный процесс временной шкалы, построенный в этой статье, подробно описан в Приложении A.
Характеристики сенсорной системы для измерения положения машины очень похожи на те, которые использовались в экспериментах в этой статье. Два экскаватора были размещены на асфальтовом покрытии. Причина, по которой был выбран рисунок 16, заключается в том, что такая близость может продемонстрировать замечательную силу предлагаемого метода. Для регистрации данных была установлена система связи Controller Area Network (CAN).Наконец, параметр η был установлен равным 0,1 (м) во всех случаях. Дополнительный полный процесс временной шкалы, построенный в этой статье, подробно описан в Приложении A.5.2. Результаты экспериментов по созданию препятствий для управления движением, чтобы избежать столкновения.
Таблица 4 и рисунок 17 предоставляют первые экспериментальные параметры для управления движением и результирующее изображение препятствия, созданное графическим интерфейсом MATLAB путем получения измеренных данных. Правое изображение на Рисунке 17 показывает состояние после того, как экскаватор B приближается к A.Левое изображение препятствия на Рисунке 17 было создано виртуальным копированием справа. Это сделано для ясного понимания. Измеренные данные, которые будут использоваться в пользовательском интерфейсе, также записаны в Таблице 4. Пунктирный кружок представляет собой вид сверху на рабочее пространство. Фактически, кабина не находится в зоне предупреждения с надписью 𝒞𝒪x, y. Следовательно, экскаватор B не подвергся столкновениям. Математически (xB, 0, yB, 0) ∉𝒞𝒪x, y. Рисунки 18 и 19 были результатами 100 на 100 матриц вычисленных 𝒞𝒪x, y. Значения m и n были выбраны равными 100.Эксперимент по манипулированию стрелой без столкновения, когда экскаватор B находится ближе к A, будет описан в следующем разделе.5.3. Результаты экспериментов по созданию препятствий для управления манипуляциями с рукоятью для предотвращения столкновения
Экспериментальная установка экскаватора A была такой же, как и в предыдущем разделе. Экскаватор A оставался неподвижным, а экскаватор B находился рядом с A, что в настоящее время выражается как (xB, 0, yB, 0) ∈𝒞𝒪x, y. Однако на рисунке 20 показано отсутствие столкновения, поскольку длина стрелы экскаватора B контролировалась, чтобы избежать столкновения.В таблице 5 примерно те же параметры, что и в таблице 4, которая дана еще на один для ясного понимания. В таблице 6 представлены измеренные параметры положения, когда экскаватор B находится ближе к экскаватору A. С этого момента будет объяснено, как оператор может избежать столкновения при управлении стрелой экскаватора. Точные результаты, указывающие на предотвращение столкновений, показаны на графике на Рисунке 21. Изображение препятствия было сгенерировано в S2. Текущий дБ равен 2,94, поэтому столкновение не может произойти ни при каком угле рыскания.Изображение препятствия на рисунке 21 получается из следующих наборов: {(x, y) | x <{𝒞𝒪i = j (θB)} ∩y> {𝒞𝒪j (dB)}}, где (x, y) ⊂S2. 22 показаны две матрицы 50 на 1 о 𝒞𝒪i = j (θB) и 𝒞𝒪j (дБ) из m и n, выбранных равными 50. На рисунке 23 показан результирующий график сгенерированного изображения препятствия, (θ3, в (x, y, z) ⊂S3. Θboom, B, θstick, B и θbucket, B были бы вне 𝒞𝒪θ3. Звездочка на графике представляет текущее значение шарниров экскаватора B. Похоже, что есть небольшой запас между звездочкой и 𝒞𝒪θ3, что указывает на то, что столкновение несколько близко.Когда дело доходит до графика x-z (стрела-ковш), кажется, что если значение угла стрелы или ковша больше, столкновение произойдет. Однако, когда дело доходит до остальных графиков x-y и y-z (рукоять стрелы и рукоять-ковш), существует слишком большой запас при столкновении, так что этот статус в некоторой степени свободен от столкновений. Необходимым условием столкновения друг с другом является то, что все соединения должны иметь подмножество 𝒞𝒪θ3. Если угол ручки больше, то условие столкновения будет выполнено. Вкратце можно сказать, что это изображение препятствия очень хорошо отражает текущую ситуацию.
Экскаватор A оставался неподвижным, а экскаватор B находился рядом с A, что в настоящее время выражается как (xB, 0, yB, 0) ∈𝒞𝒪x, y. Однако на рисунке 20 показано отсутствие столкновения, поскольку длина стрелы экскаватора B контролировалась, чтобы избежать столкновения.В таблице 5 примерно те же параметры, что и в таблице 4, которая дана еще на один для ясного понимания. В таблице 6 представлены измеренные параметры положения, когда экскаватор B находится ближе к экскаватору A. С этого момента будет объяснено, как оператор может избежать столкновения при управлении стрелой экскаватора. Точные результаты, указывающие на предотвращение столкновений, показаны на графике на Рисунке 21. Изображение препятствия было сгенерировано в S2. Текущий дБ равен 2,94, поэтому столкновение не может произойти ни при каком угле рыскания.Изображение препятствия на рисунке 21 получается из следующих наборов: {(x, y) | x <{𝒞𝒪i = j (θB)} ∩y> {𝒞𝒪j (dB)}}, где (x, y) ⊂S2. 22 показаны две матрицы 50 на 1 о 𝒞𝒪i = j (θB) и 𝒞𝒪j (дБ) из m и n, выбранных равными 50. На рисунке 23 показан результирующий график сгенерированного изображения препятствия, (θ3, в (x, y, z) ⊂S3. Θboom, B, θstick, B и θbucket, B были бы вне 𝒞𝒪θ3. Звездочка на графике представляет текущее значение шарниров экскаватора B. Похоже, что есть небольшой запас между звездочкой и 𝒞𝒪θ3, что указывает на то, что столкновение несколько близко.Когда дело доходит до графика x-z (стрела-ковш), кажется, что если значение угла стрелы или ковша больше, столкновение произойдет. Однако, когда дело доходит до остальных графиков x-y и y-z (рукоять стрелы и рукоять-ковш), существует слишком большой запас при столкновении, так что этот статус в некоторой степени свободен от столкновений. Необходимым условием столкновения друг с другом является то, что все соединения должны иметь подмножество 𝒞𝒪θ3. Если угол ручки больше, то условие столкновения будет выполнено. Вкратце можно сказать, что это изображение препятствия очень хорошо отражает текущую ситуацию. На Рис. 24, Рис. 25 и Рис. 26 представлены матрицы 33 на 33 о 𝒞𝒪ij (θboom, B), 𝒞𝒪ij (θstick, B) и 𝒞𝒪ij (θbucket, B), соответственно, из m и n, выбранных равными 33.
На Рис. 24, Рис. 25 и Рис. 26 представлены матрицы 33 на 33 о 𝒞𝒪ij (θboom, B), 𝒞𝒪ij (θstick, B) и 𝒞𝒪ij (θbucket, B), соответственно, из m и n, выбранных равными 33.6. Обсуждение
Многие решения, связанные с системой предупреждения для предотвращения столкновений, были разработаны с использованием различных типов датчиков. Сканер обнаружения и определения дальности (LIDAR), лазерный датчик, магнитный, RFID, GPS, IMU и т. Д. Были применены на строительной площадке. Для этой статьи была описана методология математического вывода, а аппаратная система для эксперимента была реализована с использованием датчиков GNSS и IMU.Используя эти датчики и разработанную аппаратную систему, полученное моделирование было проверено экспериментально.
Полезность предлагаемого метода зависит от характеристик и технических характеристик аппаратной системы в аспекте практического использования. Таким образом, независимо от того, насколько хороша производительность аппаратной системы, ложные срабатывания сигнализации могут возникать непредсказуемо. Неисправность может быть вызвана потерей связи, ошибкой датчика, непредсказуемыми помехами и т. Д. Другими словами, если вы использовали только этот метод, вы не сможете избежать ложных срабатываний хотя бы один раз.По этой причине предлагаемый метод должен дополняться другой системой мониторинга, чтобы сделать его более безопасным.
В разделе обзора литературы были кратко рассмотрены многие решения. В цитированных статьях можно найти множество сильных сторон. Все решения этих бумаг обеспечивают безопасность с более высокой точностью в заданных условиях. Таким образом, предлагаемый метод кажется дополнительным средством предотвращения столкновения, если он используется с рассмотренным решением. Несмотря на то, что работы в [44] и [25] были сосредоточены на взаимодействии между строительной техникой и пешеходом, они явно очень полезны для предотвращения столкновений с точки зрения видимости, если они были применены к нескольким экскаваторам. Кроме того, метод оценки оптимальной позы, разработанный Вахдатихаки с использованием систем определения местоположения в реальном времени, имеет очень широкий диапазон охвата [35]. Поскольку предлагаемый метод основан на измеримой и предоставленной кинематике, применение оптимальной оценки позы, разработанной Вахдатихаки, может быть хорошей альтернативой в практическом подходе.
Кроме того, метод оценки оптимальной позы, разработанный Вахдатихаки с использованием систем определения местоположения в реальном времени, имеет очень широкий диапазон охвата [35]. Поскольку предлагаемый метод основан на измеримой и предоставленной кинематике, применение оптимальной оценки позы, разработанной Вахдатихаки, может быть хорошей альтернативой в практическом подходе.Кроме того, вне рамок данной статьи, сгенерированное препятствие можно использовать непосредственно в рамках планирования пути без столкновений с учетом взаимодействия нескольких экскаваторов.Обычно планирование пути робота начинается с созданных препятствий.
Наконец, в этой статье был представлен метод, посвященный двум экскаваторам. Однако этот метод можно распространить на большее количество экскаваторов, изменив математический вывод до его общего вида. В настоящее время при выводе математического моделирования использовались некоторые ограничения и несколько параметров. Чтобы получить общее моделирование при развертывании большего количества экскаваторов, следует принять больше параметров и дополнительных ситуаций с ограничениями.Этот вопрос стоит решить в будущем, потому что многие экскаваторы фактически используются на строительной площадке.
7. Выводы
В этой статье предложен численный метод построения одного экскаватора в качестве препятствия в C-пространстве для предотвращения столкновений во время взаимодействия двух экскаваторов. Это применимо к любым экскаваторам, если положение известно и его можно измерить.
Подробно описан этап математического вывода наборов препятствий. Затем эти уравнения были проверены моделированием с использованием графического интерфейса пользователя MATLAB.
В разделе моделирования были введены заданные параметры настройки, а результаты показаны на прилагаемых рисунках и в таблицах. Сгенерированные изображения препятствий и матрицы вычисленных данных были представлены как для вождения, так и для манипуляции. Более того, добавлением дополнительного случая о столкновении была подтверждена и разработанная математическая модель.
Более того, добавлением дополнительного случая о столкновении была подтверждена и разработанная математическая модель.
В разделе экспериментов было описано фактическое использование двух экскаваторов. Эта экспериментальная установка была крайним случаем, в котором конец одного экскаватора был расположен очень близко к звену другого экскаватора.Данные измерялись и регистрировались для ввода в инструмент моделирования с графическим интерфейсом пользователя в каждый заданный период. Путем сравнения изображений с камер, графиков результатов и данных пользовательского интерфейса, эффективность предложенного метода была оценена как достаточная для использования в качестве указателя или системы наведения, позволяющей операторам избегать столкновений с другими экскаваторами. Несмотря на то, что экспериментальная установка была крайним случаем, предложенный метод обнаружил близость и точно обнаружил зону, свободную от столкновений. Кроме того, поскольку вычислительная система знала точное значение, такое как зона предупреждения и обнаружения, и положение, которого экскаватор должен избегать, оценка проходила гладко.
Ожидается, что этот метод будет особенно эффективен при взаимодействии нескольких экскаваторов с любой другой системой дистанционного управления. Экскаватор можно эффективно использовать для спасательных и восстановительных работ на опасных участках, если доступно дистанционное управление. Таким образом, совместная работа нескольких экскаваторов с дистанционным управлением имеет широкий спектр применения. Когда операторы находятся на борту экскаватора, столкновения можно предотвратить с помощью визуального сканирования и бдительности. Однако когда операторы сталкиваются с дистанционным управлением экскаваторами, им нелегко управлять этим безопасно.Предлагаемая система может быть успешно применена к системам дистанционного управления, которые особенно полезны и полезны для операторов.
Как уже упоминалось, если есть роботизированные беспилотные экскаваторы для автономных систем, предлагаемая система может быть полезной частью этой автоматизации. Для реализации автономной системы роботизированного экскаватора необходимо соблюдать два шага: первый — это планирование, а второй — управление. Оба они основаны на точных числовых параметрах. Этот предложенный метод может охватывать как планирование пути, так и контроль совместной работы нескольких экскаваторов без столкновений одновременно.Поскольку препятствие, выраженное в пространстве конфигурации по отношению к конфигурации робота, является наиболее важным параметром при формировании траектории и управлении ею, два экскаватора должны распознавать друг друга как препятствия, чтобы автоматически выполнять заданную работу без столкновения. Вначале каждый экскаватор должен найти безопасный путь, чтобы избежать столкновения с другим экскаватором. После этого робот-экскаватор должен проследить сформированный путь согласно алгоритму управления. В результате создание препятствий в области создания пути и управления является наиболее важным элементом при реализации автономной системы.Это также стоит проблемных вопросов в будущем, поскольку разработка системы автоматизации нескольких беспилотных роботизированных экскаваторов для спасательных работ будет полезна.
Для реализации автономной системы роботизированного экскаватора необходимо соблюдать два шага: первый — это планирование, а второй — управление. Оба они основаны на точных числовых параметрах. Этот предложенный метод может охватывать как планирование пути, так и контроль совместной работы нескольких экскаваторов без столкновений одновременно.Поскольку препятствие, выраженное в пространстве конфигурации по отношению к конфигурации робота, является наиболее важным параметром при формировании траектории и управлении ею, два экскаватора должны распознавать друг друга как препятствия, чтобы автоматически выполнять заданную работу без столкновения. Вначале каждый экскаватор должен найти безопасный путь, чтобы избежать столкновения с другим экскаватором. После этого робот-экскаватор должен проследить сформированный путь согласно алгоритму управления. В результате создание препятствий в области создания пути и управления является наиболее важным элементом при реализации автономной системы.Это также стоит проблемных вопросов в будущем, поскольку разработка системы автоматизации нескольких беспилотных роботизированных экскаваторов для спасательных работ будет полезна.
БЕЗОПАСНЫХ ЧАСТЕЙ, ПРОИЗВОДИМЫХ ОАО «ЧАЗ», ИСПОЛЬЗУЮТСЯ ВО МНОГИХ СТРАНАХ ЗА РУБЕЖОМ, ТАКИМ ОБРАЗОМ, КАК ИНДИЯ, ЮГО-ВОСТОК, АЗИЯ, ЛАТИНСКАЯ АМЕРИКА, АФРИКА, ЕВРОПА И Т.Д.
1
2
3 О ЗАВОДЕ Уважаемые партнеры! ООО «ЦППК» на протяжении многих лет занимает лидирующие позиции на рынке ходовых запчастей к тяжелой технике российского и зарубежного производства. Многие клиенты из разных уголков России и стран СНГ на личном опыте убедились, что наша продукция соответствует ведущим стандартам международного машиностроения. Благодаря надежности и качеству комплектующих, производимых ЧАЗом, наши партнеры смогли выстроить долгосрочные и продуктивные отношения с горнодобывающими, строительными и сельскохозяйственными предприятиями. Мы делаем все возможное, чтобы условия нашего сотрудничества были удобными для Вас как сегодня, так и в будущем. С уважением, Исполнительный директор ООО «ЧНПК» Владимир Баков ООО «ЦППК» является эксклюзивным поставщиком запасных частей и комплектующих для ходовой части производства ОАО «ЧАЗ» ( ОАО «Чебоксарский агрегатный завод») на промышленные гусеничные экскаваторы, бульдозеры, трубоукладчики (дорожно-строительная техника), сельскохозяйственные тракторы, комбайны и других отечественных и зарубежных производителей.ООО «CSPC» входит в состав Machinery & Industrial Group N.V. как специализированная торговая компания, обладающая исключительным правом на реализацию продукции ОАО «ЧАЗ». Важнейшими конкурентными преимуществами продукции ООО «ЦППК» являются: высокое качество и надежность: только качественные материалы, строгий контроль производства на всех этапах; конкурентоспособные цены на все запчасти ходовой части; широкий ассортимент: более 3000 наименований надежных оригинальных запчастей и комплектующих. НЕЗАВИСИМЫЕ ДЕТАЛИ, ПРОИЗВОДИМЫЕ АО «ЧАЗ», ИСПОЛЬЗУЮТСЯ ВО МНОГИХ СТРАНАХ ЗА РУБЕЖОМ, ТАКИМ, КАК ИНДИЯ, ЮГО-ВОСТОК, АЗИЯ, ЛАТИНСКАЯ АМЕРИКА, АФРИКА, ЕВРОПА И Т.Широко развитая дилерская сеть включает более 150 дилерских центров в России и за рубежом. Это позволяет оперативно решать все вопросы клиентов. 3
Многие клиенты из разных уголков России и стран СНГ на личном опыте убедились, что наша продукция соответствует ведущим стандартам международного машиностроения. Благодаря надежности и качеству комплектующих, производимых ЧАЗом, наши партнеры смогли выстроить долгосрочные и продуктивные отношения с горнодобывающими, строительными и сельскохозяйственными предприятиями. Мы делаем все возможное, чтобы условия нашего сотрудничества были удобными для Вас как сегодня, так и в будущем. С уважением, Исполнительный директор ООО «ЧНПК» Владимир Баков ООО «ЦППК» является эксклюзивным поставщиком запасных частей и комплектующих для ходовой части производства ОАО «ЧАЗ» ( ОАО «Чебоксарский агрегатный завод») на промышленные гусеничные экскаваторы, бульдозеры, трубоукладчики (дорожно-строительная техника), сельскохозяйственные тракторы, комбайны и других отечественных и зарубежных производителей.ООО «CSPC» входит в состав Machinery & Industrial Group N.V. как специализированная торговая компания, обладающая исключительным правом на реализацию продукции ОАО «ЧАЗ». Важнейшими конкурентными преимуществами продукции ООО «ЦППК» являются: высокое качество и надежность: только качественные материалы, строгий контроль производства на всех этапах; конкурентоспособные цены на все запчасти ходовой части; широкий ассортимент: более 3000 наименований надежных оригинальных запчастей и комплектующих. НЕЗАВИСИМЫЕ ДЕТАЛИ, ПРОИЗВОДИМЫЕ АО «ЧАЗ», ИСПОЛЬЗУЮТСЯ ВО МНОГИХ СТРАНАХ ЗА РУБЕЖОМ, ТАКИМ, КАК ИНДИЯ, ЮГО-ВОСТОК, АЗИЯ, ЛАТИНСКАЯ АМЕРИКА, АФРИКА, ЕВРОПА И Т.Широко развитая дилерская сеть включает более 150 дилерских центров в России и за рубежом. Это позволяет оперативно решать все вопросы клиентов. 3
4 О ЗАВОДЕ Чебоксарский агрегатный завод расположен в Чебоксарах, столице Чувашской Республики, которая входит в состав Российской Федерации. МНОГОЛЕТНИЙ ЧЕБОКСАРСКИЙ АГРЕГАТНЫЙ ЗАВОД ЯВЛЯЕТСЯ ПОСТОЯННЫМ ЛИДЕРОМ ПО ПРОИЗВОДСТВУ БЕЗНАРУЖНЫХ ЗАПЧАСТЕЙ ДЛЯ ГУСЕНИЧНЫХ МАШИН И ВСЕГДА УЛУЧШАЕТ КАЧЕСТВО ПРОДУКЦИИ. Завод производит гусеничные узлы для всех типов промышленных тракторов российского и зарубежного производства. Важнейшее направление — разработка и производство импортозамещающих запасных частей ходовой части к зарубежным бульдозерам и экскаваторам. Рабочая площадь завода составляет 80 га, на нем работает более 3100 человек. Сегодня для обеспечения качества продукции и удовлетворения требований наших потребителей мы применяем системный подход. Для ее реализации на предприятии действует система менеджмента качества.4
Завод производит гусеничные узлы для всех типов промышленных тракторов российского и зарубежного производства. Важнейшее направление — разработка и производство импортозамещающих запасных частей ходовой части к зарубежным бульдозерам и экскаваторам. Рабочая площадь завода составляет 80 га, на нем работает более 3100 человек. Сегодня для обеспечения качества продукции и удовлетворения требований наших потребителей мы применяем системный подход. Для ее реализации на предприятии действует система менеджмента качества.4
5 О ЗАВОДЕ Знаки качества платины, золота и серебра 21 века на выставке-конкурсе «Всероссийская марка (III тысячелетие)» подтверждают достоинства продукции ЧАЗ, как и многочисленные награды различных престижных выставок. Гусеничные гусеницы и другие компоненты ходовой части к промышленным и сельскохозяйственным машинам, узлы замков и другие детали были награждены за высокое качество и конкурентоспособность.ЗАВОД ПРОИЗВОДИТ ПРОДУКЦИЮ ДЛЯ РАЗЛИЧНЫХ ОТРАСЛЕЙ ЭКОНОМИКИ: добыча золота / алмазов; добыча нефти и газа; добыча угля; сельское хозяйство; дорожно-строительная промышленность; распиловка древесины; железнодорожное сообщение. ЗАВОД СПЕЦИАЛИЗИРУЕТСЯ НА ПРОИЗВОДСТВЕ ПО СЛЕДУЮЩИМ НАПРАВЛЕНИЯМ: Гусеничные гусеницы и детали ходовой части к промышленным машинам: — российского производства: ОАО «ПРОМТРАКТОР», ВЭКС, ТВЭКС и др. — импортозамещающие запчасти для гусеничных узлов и ходовой части KOMATSU, CATERPILLAR. комплектующие к сельскохозяйственным и лесозаготовительным тракторам.Гусеничные гусеницы и детали ходовой части к экскаваторам российского и зарубежного производства HITACHI, HYUNDAI, CATERPILLAR, KOMATSU, KATO, LIEBHERR Узлы сцепления и ведомые диски к тракторам, автомобилям и комбайнам. Комплектующие для ОАО «РЖД». Запчасти для автопрома. 5
6 Кузнечно-прессовый цех Кузнечно-прессовый цех производит весь необходимый ассортимент поковок для узлов гусеницы и производства опорных катков.На автоматической прессовой линии усилием 4000 тн мы производим грубые гусеничные звенья с шагом 190 мм и 203 мм без дополнительной механической обработки рабочей поверхности гусеничного звена.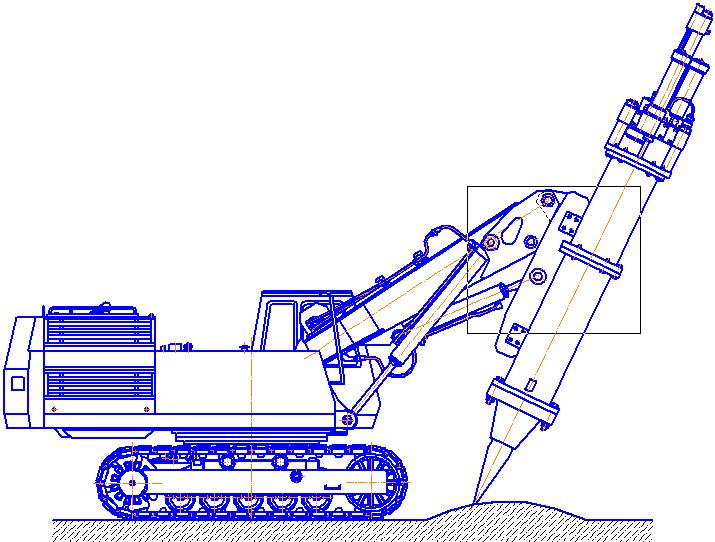 Впервые в России на нашем заводе внедрен стан поперечно-клиновой прокатки СП5000 для изготовления осей опорных катков. Перенос кузнечного производства топоров с молота на эту технологию позволил значительно повысить извлечение металла и снизить объем изготовления. 6
Впервые в России на нашем заводе внедрен стан поперечно-клиновой прокатки СП5000 для изготовления осей опорных катков. Перенос кузнечного производства топоров с молота на эту технологию позволил значительно повысить извлечение металла и снизить объем изготовления. 6
7 МЕХАНИЧЕСКОЕ СБОРНОЕ ПРОИЗВОДСТВО 1 На обрабатывающем центре «Mazak» достигаются высокая точность и качественная обработка осей роликов.Изготовление деталей наиболее массового катка для бульдозеров KOMATSU 375, CATERPILLAR D9R, D6 и T-170 (к оборудованию ЧТЗ) осуществляется по инновационной технологии горячей накатки катков с последующей закалкой и остаточным теплом. Это позволяет получить товар с минимальными производственными затратами. С этой же целью на производительном протяжном станке обрабатываются отверстия в роликах тракторов Т-170 (к оборудованию ЧТЗ) и KOMATSU 375, CATERPILLAR D9R, D6. На токарном обрабатывающем центре тандемной компоновки «Doosan» выполняем окончательную шлифовку опорных катков и направляющих роликов.Операция по упрочнению поверхности осей ролика производится на высокочастотном станке собственной разработки. В оснащение линии сборки роликов и роликов входит испытательный стенд для проверки герметичности и работоспособности. 7
8 МЕХАНИЧЕСКОЕ СБОРНОЕ ПРОИЗВОДСТВО 2 ОАО «ЧАЗ» имеет большой опыт изготовления узлов сцепления для тракторов и сельхозтехники.Производство данной продукции расположено в механосборочном цехе 2. Также имеются втулки и пальцы для тракторов легкого и среднего классов, а также башмаки для всего ассортимента гусеничных узлов производства ОАО «ЧАЗ». Изготовление пальцев и втулок начинается с операции вырубки, то есть резки на высокоэффективном ленточнопильном станке с последующей механической и термической обработкой на специальных линиях. 8
9 МЕХАНИЧЕСКОЕ СБОРНОЕ ПРОИЗВОДСТВО 3 В сборочном цехе механосборочного производства 3 производится сборка гусениц и звеньев гусеницы с различными типами соединения и шагом звеньев от 125 мм до 280 мм. При сборке контролируем усилие прижима деталей звена гусеницы, герметичность уплотненных и смазанных стыков, а также момент фиксации башмаков. Внедрение современного оборудования «Mazak» и «Doosan» для обработки звеньев гусениц и половинок к промышленным бульдозерам позволило повысить точность прессования и качество звеньев гусениц. Переход на это оборудование позволил заводу минимизировать затраты на разработку нового ассортимента по сравнению с ранее применявшейся технологией. Звенья и полузвенья гусеничной группы тракторов легкого и среднего класса обрабатываются на обрабатывающих центрах «Mitsubishi».9
При сборке контролируем усилие прижима деталей звена гусеницы, герметичность уплотненных и смазанных стыков, а также момент фиксации башмаков. Внедрение современного оборудования «Mazak» и «Doosan» для обработки звеньев гусениц и половинок к промышленным бульдозерам позволило повысить точность прессования и качество звеньев гусениц. Переход на это оборудование позволил заводу минимизировать затраты на разработку нового ассортимента по сравнению с ранее применявшейся технологией. Звенья и полузвенья гусеничной группы тракторов легкого и среднего класса обрабатываются на обрабатывающих центрах «Mitsubishi».9
10 ПЛОЩАДЬ ХРАНЕНИЯ ГОТОВОЙ ПРОДУКЦИИ Готовая продукция поступает на специализированные склады ОАО «ЧАЗ» и ООО «ЧНПК» в г. Чебоксары. Условия хранения изнашиваемых элементов и запасных частей к ходовой части тяжелых гусеничных машин соответствуют требованиям Госстандарта, группа 2 (С).Кроме склада в Чебоксарах ООО «ЧНПК» имеет широкую сеть складских площадей по всей России. Часть готовой продукции перемещается на склады в Уральском, Сибирском и Дальневосточном федеральных округах. Реализуемые ООО «ЦСПК» товары экспортируются в 38 стран мира, включая Европу, Азию, Африку, Америку и страны СНГ. Развитая дилерская сеть компании всегда готова оперативно помочь своим клиентам. Благодаря тесному контакту с конечным заказчиком и обратной связи производители систем учитывают все замечания и пожелания при дальнейшем проектировании.10
11 НАЗНАЧЕНИЕ Оборудование для сельскохозяйственных работ и лесного хозяйства. (АГРОМАШ, JOHN DEER, ОНЕЖЕЦ, СИЛВАТЭК) Дорожно-строительная техника и землеройные машины. (Экскаваторы и тракторы ЧЕТРА, ЧТЗ, КАТ, JOHN DEER, HITACHI, HYUNDAI, VOLVO, KOMATSU) Оборудование для угольной, нефтегазовой промышленности.(CHETRA, CAT, JOHN DEER, KOMATSU) Горное оборудование. (CHETRA, CAT, HITACHI, KOMATSU) 11
12 наименований Марка Модель БАЗОВЫЕ ДЕТАЛИ ДЛЯ БУЛЬДОЗЕРОВ ИНОСТРАННОГО ПРОИЗВОДСТВА Гусеницы в сборе CASE 1850K, 2050M и звено гусеницы CATERPILLAR D4C / D / E, D6D / E / G, D6H / R, D8N / R / T / L / H / K, D9N / R / T / G / H, D10N / R / T сборки CNH D180, D350 DADI MD16, MD23, MD32 DRESSTA TD-15C JOHN DEERE 850 / B, JD850 / J / K KOMATSU D60A / F, D63E, D65A / E / EX / Р / PX, D80P, D85A / E / P, D155A / AX, D275A / AX, D355A, D375A LIEBHERR PR712 / BL / BM / L / M, PR731B / C, PR732, PR734 / L, PR751, PR752, PR754, PR764 PENG PU PD165, PD220Y, PD320Y POWER PLUS D65EX, D85EX, D155B, D355B SHANTUI SD16 / C / E / L / T / TL, SD22 / E / D / S, SD23 / E / S, SD32 SHEHWA (HBXG) TY165, TYS165, SD6 G, SD8B, SD9 XGMA XG4161L, XG4181L, XG4220D, LXG4221L, XG4220S, XG4321L, ZOOML3, ZOOMLK, CAT220, ZOOM, ZOOML, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM201, ZOOM, ZOOM, ZOOM, ZOOM, ZOOM 20, ZOOM, ZOOM, ZOOM, ZOOM201, гусеничный каток 20, ZOOM, ZOOML, ZOOM, ZOOM, ZD20160, ZOOM, ZOOML.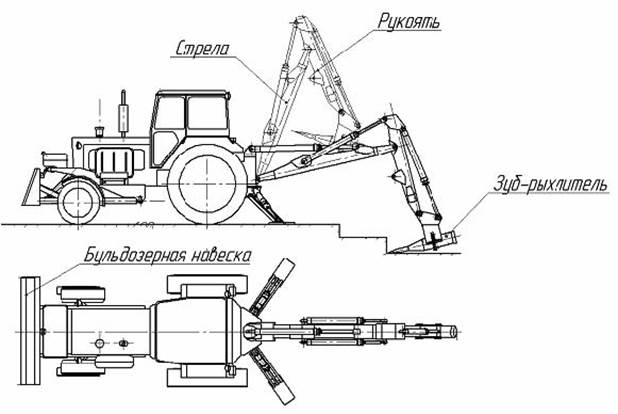 D6D / E / G, D6H / R, D9N / R / T / G / H CNH D180 DADI MD16, MD32 JOHN DEERE 850 / B, JD850 / J / K KOMATSU D60A / F, D63E, D65A / E / EX / Р / PX, D155A / AX, D275A / AX, D355A LI EBHERR PR731B / C, PR732, PR734 / L, PR764 PENG PU PD165, PD320Y POWER PLUS D65EX, D355B SHANTUI SD16 / C / E / L / T / TL, SD32 SHEHWA (HBXG) TY165, TYS165, SD6 G, SD9 XGLMA XG , XG4181L, XG4321L ZOOMLION ZD160, ZD320 Сегмент звездочки KOMATSU D60A / F, D63E, D65A / E / EX / Р / PX, D355A PENG PU PD165 POWER PLUS D65EX, D355B SHANTUI SD16 / C / EERC / L / T / T ДЛЯ БУЛЬДОЗЕРОВ ПРОИЗВОДСТВА СТРАН РОССИИ И СНГ Гусеничные и гусеничные узлы ДМ (Дормаш, В-100 / -120 / -150 г. Орел) ДСТ-Урал ТМ10Е ГСТ, ТМ-10.00Б, ТМ-10.00ГСТ, ТМ-10.10 / Б / Е, ТМ10.11 / Е ЧЕТРА Т6, Т9 / Л / М Т11 / Л / М / С, Т15 / Л / М, Т20 / Л / М, Т25 / М, Т35 / Л / М, Т40 ЧСДМ ТС10 ЧТЗ Б-140, Т-130, Т-170 / М, Б-170М / МБ, Б-10 / Б / М, Б-11 / Б / М, Т- 10 / М / МБ, Б- 12 / Б, Б13 / Б, Б-14 / Б, Б-15, ДЭТ-250 / -320 / -400 ХТЗ ТS10 12
D6D / E / G, D6H / R, D9N / R / T / G / H CNH D180 DADI MD16, MD32 JOHN DEERE 850 / B, JD850 / J / K KOMATSU D60A / F, D63E, D65A / E / EX / Р / PX, D155A / AX, D275A / AX, D355A LI EBHERR PR731B / C, PR732, PR734 / L, PR764 PENG PU PD165, PD320Y POWER PLUS D65EX, D355B SHANTUI SD16 / C / E / L / T / TL, SD32 SHEHWA (HBXG) TY165, TYS165, SD6 G, SD9 XGLMA XG , XG4181L, XG4321L ZOOMLION ZD160, ZD320 Сегмент звездочки KOMATSU D60A / F, D63E, D65A / E / EX / Р / PX, D355A PENG PU PD165 POWER PLUS D65EX, D355B SHANTUI SD16 / C / EERC / L / T / T ДЛЯ БУЛЬДОЗЕРОВ ПРОИЗВОДСТВА СТРАН РОССИИ И СНГ Гусеничные и гусеничные узлы ДМ (Дормаш, В-100 / -120 / -150 г. Орел) ДСТ-Урал ТМ10Е ГСТ, ТМ-10.00Б, ТМ-10.00ГСТ, ТМ-10.10 / Б / Е, ТМ10.11 / Е ЧЕТРА Т6, Т9 / Л / М Т11 / Л / М / С, Т15 / Л / М, Т20 / Л / М, Т25 / М, Т35 / Л / М, Т40 ЧСДМ ТС10 ЧТЗ Б-140, Т-130, Т-170 / М, Б-170М / МБ, Б-10 / Б / М, Б-11 / Б / М, Т- 10 / М / МБ, Б- 12 / Б, Б13 / Б, Б-14 / Б, Б-15, ДЭТ-250 / -320 / -400 ХТЗ ТS10 12
13 Наименование Марка Модель Каток опорный ДМ (Дормаш, В (Б) -100 / -120 / -150 г. Орел) ДСТ-Урал ТМ10Е ГСТ, ТМ-10.00Б, ТМ-10.00ГСТ, ТМ-10.10 / Б / Е, ТМ10.11 / Е ЧЕТРА Т6, Т9 / Л / М Т11 / Л / М / С, Т15 / Л / М, Т20 / Л / М, Т25 / М, Т35 / Л / М, Т40 ЧСДМ ТС10 ЧТЗ Б-140, Т-130, Т-170 / М, Б-170М / МБ, Б-10 / Б / М, Б-11 / Б / М, Т-10 / М / МБ, Б-12 / Б, Б13 / Б, Б-14 / Б, Б-15 ХТЗ ТС10 Звездочка сегментная ДМ (Дормаш, В (Б) -100 / -120 / -150 г. Орел) ДСТ-Урал ТМ10Е ГСТ, ТМ-10.00Б, ТМ-10.00ГСТ, ТМ-10.10 / Б / Е, ТМ10.11 / Е ЧЕТРА Т6, Т9 / Л / М Т11 / Л / М / С, Т15 / Л / М, Т20 / Л / М, Т25 / М, Т35 / Л / М, Т40 ЧСДМ ТС10 ЧТЗ Б-140, Т-130, Т-170 / М, Б-170М / МБ, Б-10 / Б / М, Б-11 / Б / М, Т- 10 / М / МБ, B-12 / B, B13 / B, B-14 / B, B-15 ХТЗ ТS10 Опорный каток ЧЕТРА Т6, Т9 / L / М Т11 / L / М / С, Т15 / L / М , Т20 / Л / М, Т25 / М, Т35 / Л / М, Т40 Ролик ЧЕТРА Т6, Т9 / Л / М Т11 / Л / М / С, Т15 / Л / М, Т20 / Л / М, Т25 / М , Т35 / L / М, Т40 ПОДЪЕМНИКИ ДЛЯ ПОГРУЗЧИКОВ ЗАРУБЕЖНОГО ПРОИЗВОДСТВА Гусеничные гусеницы CATERPILLAR 941B, 955L, 963 / B / C / D и гусеничные тяги в сборе KOMATSU D95S Гусеничный каток CATERPILLAR 955L, 963 / B / C / D UNDERCARRIAGE ДЕТАЛИ ДЛЯ ТРУБОПРОВОДОВ ЗАРУБЕЖНОГО ПРОИЗВОДСТВА Гусеницы в сборе CATERPILLAR 578, 594 и гусеницы DAI-FENG DGY-90 KOMATSU D85C, D155C, D355C LIEBHERR RL754, RL451 PLANTUI SP25Y / L, SP70845Y / SV роликовый узел DAI-FENG DGY-90 KOMATSU D155C, D355C SHANTUI SP25Y / L, SP70Y Сегмент звездочки KOMATSU D355C БЕЗКАРЯДНЫЕ ДЕТАЛИ ДЛЯ ТРУБОПРОКАТОВ РОССИЙСКОГО ПРОИЗВОДСТВА N Гусеничные гусеницы БРМЗ ТБГ-16, ТБГ-20, ТБГ-90 и гусеницы ДСТ-Урал ТГ20, ТГ30, ТО12 МРМЗ ТГ-124А, УРМ-4 ЧЕТРА ТГ-121, ТГ-122, ТГ-221, ТГ301 , ТГ-302, ТГ-321, ТГ-502, ТГ-503, ТГ511, ТТ-330 ЧТЗ ТР, ТР ДСТ-Урал ТГ20, ТГ30, ТО12 13
14 Наименование Марка Модель Ролик опорный в сборе БРМЗ ТБГ-16, ТБГ -20, ТБГ-90 ДСТ-Урал ТГ20, ТГ30, ТО12 МРМЗ ТГ-124А, УРМ-4 ЧЕТРА ТГ-121, ТГ-122, ТГ-221, ТГ301, ТГ-302, ТГ-321, ТГ-502, ТГ -503, TG511 ЧТЗ ТР, ТР Сегмент звездочки БРМЗ ТБГ-16, ТБГ-20, ТБГ-90 ДСТ-Урал ТГ20, ТГ30, ТО12 МРМЗ ТГ-124А, УРМ-4 ЧЕТРА ТГ-121, ТГ-122, ТГ-221 , ТГ301, ТГ-302, ТГ-321, ТГ-502, ТГ-503, ТГ511 ЧТЗ ТР, ТР Ролик опорный МРМЗ ТГ-124А, УРМ-4 ЧЕТРА ТГ-121, ТГ-122, ТГ-221, ТГ301, ТГ -302, ТГ-321, ТГ-502, ТГ-503, ТГ511 Ролик МРМЗ ТГ-124А, УРМ-4 ЧЕТРА ТГ-121, ТГ-122, ТГ-221, ТГ301, ТГ-302, ТГ-321, ТГ- 502, ТГ-503, ТГ511 ПОДГАРЮЗНЫЕ ЧАСТИ ЭКСКАВАТОРОВ ЗАРУБЕЖНОГО ПРОИЗВОДСТВА Гусеничные узлы и гусеницы звено в сборе ATLAS-TEREX BUMAR WARYNSKI CASE CATERPILLAR DOOSAN (DAEWOO) HIDROMEC HITACHI HYUNDAI JCB JOHN DEERE KATO KOBELCO KOMATSU 1304HD, 1404HD, 1604LC-2, 1704LC К-606 / К B, 9030 B / C B, B 9030 / B NLC / NLC, CX225 / SR, CX230, CX240 / B / LR, CX250 / C, CX350 / B / C, CX800 / B E200B, E240 / B / C, EL200B, EL240 / B / C, 315 / C / L, 317 / N / BL / BLN / BN / C, 318BN / C / BL / CL / CLN, 320 / B / C / N / BN / BL / BLL / CL / L / DL / DLN, 321C / LC , 322 / B / L / N / BL / BLN / CL / DL / L / LN, 323DL / DLN, 324D / DL / DLN, 345BL / CL / DL Dh270, Dh320LC, Solar 170, Solar 175, СОЛНЕЧНЫЙ 220LC, СОЛНЕЧНЫЙ 220LC, СОЛНЕЧНЫЙ 225LC, DX225LC / NLC / LR, Солнечный 250LC, Солнечный 255LC, DX255LC, DX300LC, DX340LC, 400LC, LC / LR UH09 / LC, Uh203, EX100M, EX165 / LC, EX160LC, ZX160LC, EX200 / LC, EX210H, EX215 / E / LC, EX220 / LC, EX255 / EC / EL, EX300 / LC, EX330LC, EX400 / LC / LCH, EX450LCH, EX700 / BE / H, EX750, ZX180LC / LCN, ZX200 / H / K / LC / LCH / LCK, ZX210 // H / K / LC / LCH / LCK, ZX225 / LC, ZX230LC, ZX240 / HD / LC, ZX250 / H / K / LC / LCK, ZX270 / LC, ZX280LC, ZX330 / LC, ZX350 / H / K / LC / LCH / LCK / LCN, ZX450LCH, ZX460LCH, ZX470LCH, ZX670LCH R200, R210 / LC / NLC, R220LC, R235LCR, R250 / LC / NLC, R260LC, R290LC / LCN, R305LC, R320LC, R320NLC, R360LC, R420, R450LC JS160L / NL, JS180L / NLC, JS200 / LC, JS210N / S / LC / LR, JS240SC / S / NLC, JS260SC / LC / NLC 160LC / CLC / DLC, 225LC / D LC, 230C / D / LC, 240D LC, 245G LC, 250G LC, 270C / D LC, 290G LC, 330 / C LC, 350D / G LC, 380G LC, 690ELC, 790 / D / LC / E LC HD820 / LC К909 / A / LC, SK150LC, SK160LC, SK170LC, SK200 / LC, SK210 / LC, SK220LC, SK235SR / LC, SK250 / LC, SK260, SK400LC PF55L / -1, PC100L, PC150 / LC / HD / NHD, PC160, PC180 / LC / NLC / LLC, PC190LC / NLC, PC200 / EL / LC / NLC, P210 / LC / NLC, PC220 / LC / LCH, PC228US / LC, PC230 / LC, PC240 / LC / NLC, PC290LC / NLC, PC300 / LC, PC340LC / NLC, PC350 / LC, PC360, PC650, PC710 / SE, PC750 / LC, PC800 / SE / LC 14
15 Наименование Марка Модель Опорный каток в сборе LIEBHERR Terex O&K VOLVO BUMAR WARYNSKI DOOSAN (DAEWOO) HIDROMEC HITACHI JOHN DEERE Terex O&K R902HD / HDSL / HDLC, R14904 / HDSTD9, R14904 / HDSL, R14904 / HDSL, , R922HD- SL, R924, R932HDSL, R934HD / HDSL, R9 52 / HD, R954 / HD, R961BLC, R962LC, R965 / B R6-22, RH6 / LC / NLC, RH6-20 / LC, RH6-22LC, Rh22.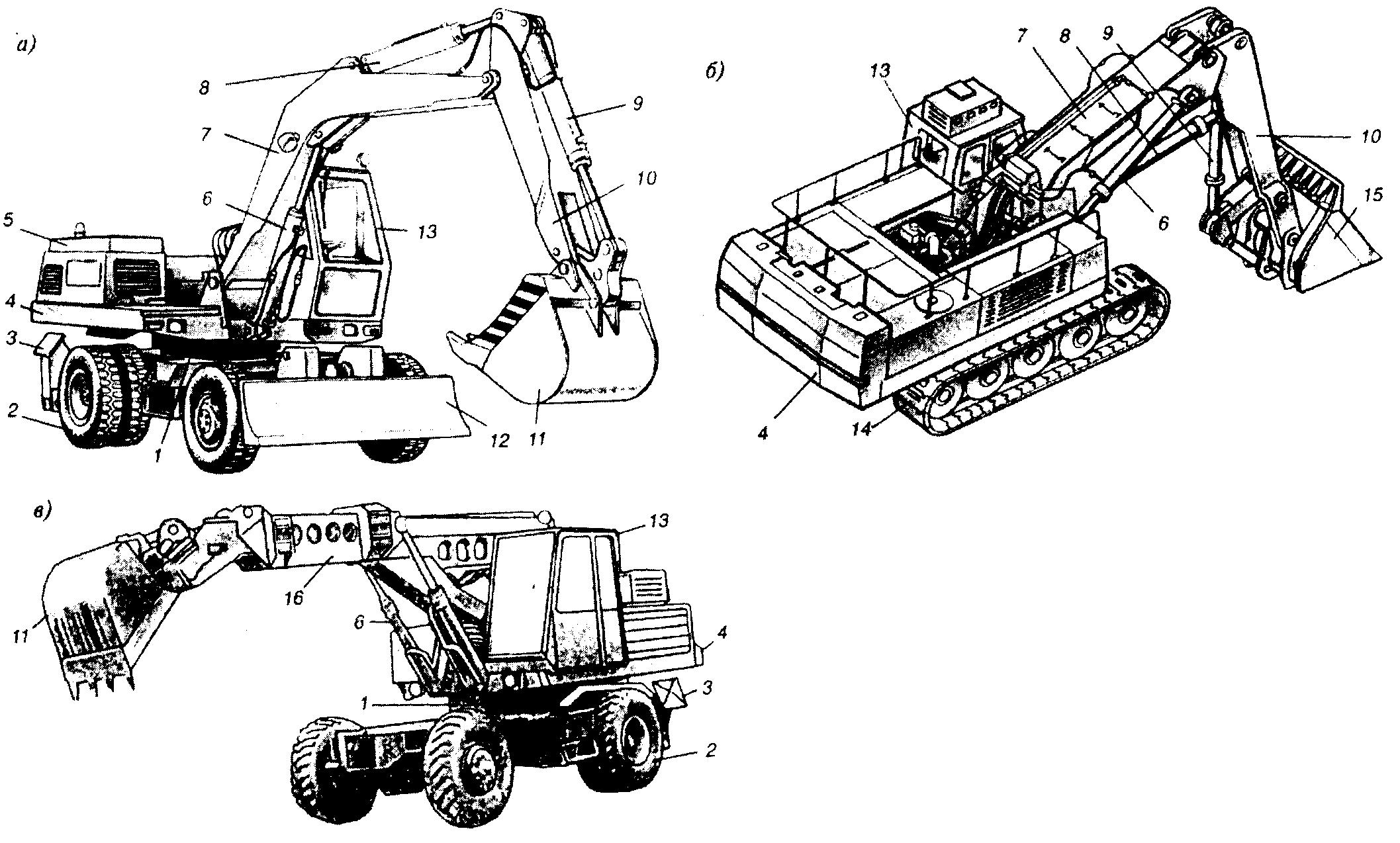 5LC h20BLC-2, h22BLC-2, h26DLC, EC180BLC, EC200, EC210NLC, EC230-1, EC240 / B / N LC, EC360 / B LC, EC420, EC460 / B LC К-606, К-612 Dh270, Dh320LC, Solar 170, Solar 175, SOLAR 220LC, SOLAR 220LC, SOLAR 225LC, DX225LC / NLC / LR, Solar 250LC, Solar 255LC, DX255LC, DX300LC, DX340LC 220LC / LR Uh203, EX100M, EX165 / LC, EX160LC, ZX160LC, EX200 / LC , EX210H, EX215 / E / LC, EX220 / LC, EX255 / EC / EL, EX300 / LC, EX330LC, ZX180LC / LCN, ZX200 / H / K / LC / LCH / LCK, ZX210 // H / K / LC / LCH / LCK, ZX225 / LC, ZX230LC, ZX240 / HD / LC, ZX250 / H / K / LC / LCK, ZX270 / LC, ZX280LC, ZX330 / LC, ZX350 / H / K / LC / LCH / LCK / LCN 160LC / CLC / DLC, 225LC / D LC, 230C / D / LC, 240D LC, 245G LC, 250G LC, 690ELC, 790LC / E LC Rh22.ПОДГРУЗОЧНЫЕ ДЕТАЛИ 5LC ДЛЯ ЭКСКАВАТОРОВ ПРОИЗВОДСТВА СТРАН РОССИИ И СНГ Гусеничные и гусеничные узлы ВЗЭ (ВЭКС) ДОНЭКС Ковровез Кохановский экскаваторный завод КРАНЭКС ТВЭКС Уралвагонзавод ВЭКС-30Л, ЭО-5124, ЭО-41211, ЭО-41211, ЭО-41211 -3123 / -4124 / -4125 / -4224 / -4225 / 4226, ЕТ-14 / -16 / -18 / 20, КИТ-26 EO-3223 ЕК-270 / LC ЕТ-14 / -16 / -18 / -20 / -26, 140LC, 180LC ЭО-5124, ЭО-5126 ЧЕТРА ЭГП 200, 230, ЭГП 270, ЭГП 450 ЧТЗ ЭО112М.01 Ролик опорный в сборе Ковровез ЭО-3123 / -4124 / -4125 / -4224 / -4225 / 4226, ЕТ-14 / -16 / -18 / 20, КИТ-26 Кохановский экскаваторный завод ТВЭКС ЭО-3223 ЕТ-14 / -16 / -18 / -20 / -26, 140LC, 180LC ЧЕТРА ЭГП 200, 230, EGP 270, EGP 450 Звездочка CHETRA EGP 200, 230, EGP 270, EGP 450 Опорный ролик CHETRA EGP 200, 230, EGP 270, EGP 450 Ролик CHETRA EGP 200, 230, EGP 270, EGP
5LC h20BLC-2, h22BLC-2, h26DLC, EC180BLC, EC200, EC210NLC, EC230-1, EC240 / B / N LC, EC360 / B LC, EC420, EC460 / B LC К-606, К-612 Dh270, Dh320LC, Solar 170, Solar 175, SOLAR 220LC, SOLAR 220LC, SOLAR 225LC, DX225LC / NLC / LR, Solar 250LC, Solar 255LC, DX255LC, DX300LC, DX340LC 220LC / LR Uh203, EX100M, EX165 / LC, EX160LC, ZX160LC, EX200 / LC , EX210H, EX215 / E / LC, EX220 / LC, EX255 / EC / EL, EX300 / LC, EX330LC, ZX180LC / LCN, ZX200 / H / K / LC / LCH / LCK, ZX210 // H / K / LC / LCH / LCK, ZX225 / LC, ZX230LC, ZX240 / HD / LC, ZX250 / H / K / LC / LCK, ZX270 / LC, ZX280LC, ZX330 / LC, ZX350 / H / K / LC / LCH / LCK / LCN 160LC / CLC / DLC, 225LC / D LC, 230C / D / LC, 240D LC, 245G LC, 250G LC, 690ELC, 790LC / E LC Rh22.ПОДГРУЗОЧНЫЕ ДЕТАЛИ 5LC ДЛЯ ЭКСКАВАТОРОВ ПРОИЗВОДСТВА СТРАН РОССИИ И СНГ Гусеничные и гусеничные узлы ВЗЭ (ВЭКС) ДОНЭКС Ковровез Кохановский экскаваторный завод КРАНЭКС ТВЭКС Уралвагонзавод ВЭКС-30Л, ЭО-5124, ЭО-41211, ЭО-41211, ЭО-41211 -3123 / -4124 / -4125 / -4224 / -4225 / 4226, ЕТ-14 / -16 / -18 / 20, КИТ-26 EO-3223 ЕК-270 / LC ЕТ-14 / -16 / -18 / -20 / -26, 140LC, 180LC ЭО-5124, ЭО-5126 ЧЕТРА ЭГП 200, 230, ЭГП 270, ЭГП 450 ЧТЗ ЭО112М.01 Ролик опорный в сборе Ковровез ЭО-3123 / -4124 / -4125 / -4224 / -4225 / 4226, ЕТ-14 / -16 / -18 / 20, КИТ-26 Кохановский экскаваторный завод ТВЭКС ЭО-3223 ЕТ-14 / -16 / -18 / -20 / -26, 140LC, 180LC ЧЕТРА ЭГП 200, 230, EGP 270, EGP 450 Звездочка CHETRA EGP 200, 230, EGP 270, EGP 450 Опорный ролик CHETRA EGP 200, 230, EGP 270, EGP 450 Ролик CHETRA EGP 200, 230, EGP 270, EGP
16 ГЛАВНЫЙ ОФИС CSPC LLC, CHEBOKSARY Марпосадское шоссе, пр.Мира Автовокзал ул. Егерская Ул. Хевешская Пр. Яковлевой в Москву в Казань Адрес:, Россия, Чувашская Республика, г. Чебоксары, пр. Мира, 1 Тел .: +7 (8352), Факс: +7 (8352) Наталья Романова Тел .: +7 (8352) доб. 323 Тел .: +7 (8352) Яна Николаева Тел .: +7 (8352) доб. 320 Тел: +7 (8352) Оксана Трифонова Тел .: +7 (8352) доб. 312 Тел: +7 (8352) Евгений Романов Тел .: +7 (8352) доб. 316 Тел .: +7 (8352)
316 Тел .: +7 (8352)
Конгресс.gov | Библиотека Конгресса
Секция записи Конгресса Ежедневный дайджест Сенат жилой дом Расширения замечаний
Замечания участников
Автор: Any House Member Адамс, Альма С.[D-NC] Адерхольт, Роберт Б. [R-AL] Агилар, Пит [D-CA] Аллен, Рик В. [R-GA] Оллред, Колин З. [D-TX] Амодеи, Марк Э. [R -NV] Армстронг, Келли [R-ND] Аррингтон, Джоди К. [R-TX] Auchincloss, Jake [D-MA] Axne, Cynthia [D-IA] Бабин, Брайан [R-TX] Бэкон, Дон [R -NE] Бэрд, Джеймс Р. [R-IN] Балдерсон, Трой [R-OH] Бэнкс, Джим [R-IN] Барр, Энди [R-KY] Барраган, Нанетт Диас [D-CA] Басс, Карен [ D-CA] Битти, Джойс [D-OH] Бенц, Клифф [R-OR] Бера, Ами [D-CA] Бергман, Джек [R-MI] Бейер, Дональд С., младший [D-VA] Байс , Стефани И. [R-OK] Биггс, Энди [R-AZ] Билиракис, Гас М.[R-FL] Бишоп, Дэн [R-NC] Бишоп, Сэнфорд Д., младший [D-GA] Блуменауэр, Эрл [D-OR] Блант Рочестер, Лиза [D-DE] Боберт, Лорен [R-CO ] Бонамичи, Сюзанна [D-OR] Бост, Майк [R-IL] Bourdeaux, Carolyn [D-GA] Bowman, Jamaal [D-NY] Бойл, Брендан Ф. [D-PA] Брэди, Кевин [R-TX ] Брукс, Мо [R-AL] Браун, Энтони Г. [D-MD] Браунли, Джулия [D-CA] Бьюкенен, Верн [R-FL] Бак, Кен [R-CO] Бакшон, Ларри [R-IN ] Бадд, Тед [R-NC] Берчетт, Тим [R-TN] Берджесс, Майкл С. [R-TX] Буш, Кори [D-MO] Бустос, Cheri [D-IL] Баттерфилд, GK [D-NC ] Калверт, Кен [R-CA] Каммак, Кэт [R-FL] Карбаджал, Салуд О.[D-CA] Карденас, Тони [D-CA] Карл, Джерри Л. [R-AL] Карсон, Андре [D-IN] Картер, Эрл Л. «Бадди» [R-GA] Картер, Джон Р. [ R-TX] Картрайт, Мэтт [D-PA] Кейс, Эд [D-HI] Кастен, Шон [D-IL] Кастор, Кэти [D-FL] Кастро, Хоакин [D-TX] Коуторн, Мэдисон [R- NC] Шабо, Стив [R-OH] Чейни, Лиз [R-WY] Чу, Джуди [D-CA] Cicilline, Дэвид Н. [D-RI] Кларк, Кэтрин М. [D-MA] Кларк, Иветт Д. . [D-NY] Кливер, Эмануэль [D-MO] Клайн, Бен [R-VA] Клауд, Майкл [R-TX] Клайберн, Джеймс Э. [D-SC] Клайд, Эндрю С. [R-GA] Коэн, Стив [D-TN] Коул, Том [R-OK] Комер, Джеймс [R-KY] Коннолли, Джеральд Э.[D-VA] Купер, Джим [D-TN] Корреа, Дж. Луис [D-CA] Коста, Джим [D-CA] Кортни, Джо [D-CT] Крейг, Энджи [D-MN] Кроуфорд, Эрик А. «Рик» [R-AR] Креншоу, Дэн [R-TX] Крист, Чарли [D-FL] Кроу, Джейсон [D-CO] Куэльяр, Генри [D-TX] Кертис, Джон Р. [R- UT] Дэвидс, Шарис [D-KS] Дэвидсон, Уоррен [R-OH] Дэвис, Дэнни К. [D-IL] Дэвис, Родни [R-IL] Дин, Мадлен [D-PA] ДеФазио, Питер А. [ D-OR] DeGette, Diana [D-CO] DeLauro, Rosa L. [D-CT] DelBene, Suzan K. [D-WA] Delgado, Antonio [D-NY] Demings, Val Butler [D-FL] DeSaulnier , Марк [D-CA] ДеДжарле, Скотт [R-TN] Дойч, Теодор Э.[D-FL] Диас-Баларт, Марио [R-FL] Дингелл, Дебби [D-MI] Доггетт, Ллойд [D-TX] Дональдс, Байрон [R-FL] Дойл, Майкл Ф. [D-PA] Дункан , Джефф [R-SC] Данн, Нил П. [R-FL] Эммер, Том [R-MN] Эскобар, Вероника [D-TX] Эшу, Анна Г. [D-CA] Эспайлат, Адриано [D-NY ] Эстес, Рон [R-KS] Эванс, Дуайт [D-PA] Фаллон, Пэт [R-TX] Feenstra, Рэнди [R-IA] Фергюсон, А. Дрю, IV [R-GA] Фишбах, Мишель [R -MN] Фицджеральд, Скотт [R-WI] Фитцпатрик, Брайан К. [R-PA] Флейшманн, Чарльз Дж. «Чак» [R-TN] Флетчер, Лиззи [D-TX] Фортенберри, Джефф [R-NE] Фостер, Билл [D-IL] Фокс, Вирджиния [R-NC] Франкель, Лоис [D-FL] Франклин, К.Скотт [R-FL] Фадж, Марсия Л. [D-OH] Фулчер, Расс [R-ID] Gaetz, Мэтт [R-FL] Галлахер, Майк [R-WI] Галлего, Рубен [D-AZ] Гараменди, Джон [D-CA] Гарбарино, Эндрю Р. [R-NY] Гарсия, Хесус Дж. «Чуй» [D-IL] Гарсия, Майк [R-CA] Гарсия, Сильвия Р. [D-TX] Гиббс, Боб [R-OH] Хименес, Карлос А. [R-FL] Гомерт, Луи [R-TX] Голден, Джаред Ф. [D-ME] Гомес, Джимми [D-CA] Гонсалес, Тони [R-TX] Гонсалес , Энтони [R-OH] Гонсалес, Висенте [D-TX] Гонсалес-Колон, Дженниффер [R-PR] Гуд, Боб [R-VA] Гуден, Лэнс [R-TX] Госар, Пол А. [R-AZ ] Gottheimer, Джош [D-NJ] Granger, Kay [R-TX] Graves, Garret [R-LA] Graves, Sam [R-MO] Green, Al [D-TX] Green, Mark E.
[D-RI] Кларк, Кэтрин М. [D-MA] Кларк, Иветт Д. . [D-NY] Кливер, Эмануэль [D-MO] Клайн, Бен [R-VA] Клауд, Майкл [R-TX] Клайберн, Джеймс Э. [D-SC] Клайд, Эндрю С. [R-GA] Коэн, Стив [D-TN] Коул, Том [R-OK] Комер, Джеймс [R-KY] Коннолли, Джеральд Э.[D-VA] Купер, Джим [D-TN] Корреа, Дж. Луис [D-CA] Коста, Джим [D-CA] Кортни, Джо [D-CT] Крейг, Энджи [D-MN] Кроуфорд, Эрик А. «Рик» [R-AR] Креншоу, Дэн [R-TX] Крист, Чарли [D-FL] Кроу, Джейсон [D-CO] Куэльяр, Генри [D-TX] Кертис, Джон Р. [R- UT] Дэвидс, Шарис [D-KS] Дэвидсон, Уоррен [R-OH] Дэвис, Дэнни К. [D-IL] Дэвис, Родни [R-IL] Дин, Мадлен [D-PA] ДеФазио, Питер А. [ D-OR] DeGette, Diana [D-CO] DeLauro, Rosa L. [D-CT] DelBene, Suzan K. [D-WA] Delgado, Antonio [D-NY] Demings, Val Butler [D-FL] DeSaulnier , Марк [D-CA] ДеДжарле, Скотт [R-TN] Дойч, Теодор Э.[D-FL] Диас-Баларт, Марио [R-FL] Дингелл, Дебби [D-MI] Доггетт, Ллойд [D-TX] Дональдс, Байрон [R-FL] Дойл, Майкл Ф. [D-PA] Дункан , Джефф [R-SC] Данн, Нил П. [R-FL] Эммер, Том [R-MN] Эскобар, Вероника [D-TX] Эшу, Анна Г. [D-CA] Эспайлат, Адриано [D-NY ] Эстес, Рон [R-KS] Эванс, Дуайт [D-PA] Фаллон, Пэт [R-TX] Feenstra, Рэнди [R-IA] Фергюсон, А. Дрю, IV [R-GA] Фишбах, Мишель [R -MN] Фицджеральд, Скотт [R-WI] Фитцпатрик, Брайан К. [R-PA] Флейшманн, Чарльз Дж. «Чак» [R-TN] Флетчер, Лиззи [D-TX] Фортенберри, Джефф [R-NE] Фостер, Билл [D-IL] Фокс, Вирджиния [R-NC] Франкель, Лоис [D-FL] Франклин, К.Скотт [R-FL] Фадж, Марсия Л. [D-OH] Фулчер, Расс [R-ID] Gaetz, Мэтт [R-FL] Галлахер, Майк [R-WI] Галлего, Рубен [D-AZ] Гараменди, Джон [D-CA] Гарбарино, Эндрю Р. [R-NY] Гарсия, Хесус Дж. «Чуй» [D-IL] Гарсия, Майк [R-CA] Гарсия, Сильвия Р. [D-TX] Гиббс, Боб [R-OH] Хименес, Карлос А. [R-FL] Гомерт, Луи [R-TX] Голден, Джаред Ф. [D-ME] Гомес, Джимми [D-CA] Гонсалес, Тони [R-TX] Гонсалес , Энтони [R-OH] Гонсалес, Висенте [D-TX] Гонсалес-Колон, Дженниффер [R-PR] Гуд, Боб [R-VA] Гуден, Лэнс [R-TX] Госар, Пол А. [R-AZ ] Gottheimer, Джош [D-NJ] Granger, Kay [R-TX] Graves, Garret [R-LA] Graves, Sam [R-MO] Green, Al [D-TX] Green, Mark E. [R-TN] Грин, Марджори Тейлор [R-GA] Гриффит, Х. Морган [R-VA] Гриджалва, Рауль М. [D-AZ] Гротман, Гленн [R-WI] Гость, Майкл [R-MS] Гатри, Бретт [R-KY] Хааланд, Дебра А. [D-NM] Хагедорн, Джим [R-MN] Хардер, Джош [D-CA] Харрис, Энди [R-MD] Харшбаргер, Диана [R-TN] Хартцлер, Вики [R-MO] Гастингс, Элси Л. [D-FL] Хейс, Джахана [D-CT] Херн, Кевин [R-OK] Херрелл, Иветт [R-NM] Эррера Бейтлер, Хайме [R-WA ] Хайс, Джоди Б. [R-GA] Хиггинс, Брайан [D-NY] Хиггинс, Клэй [R-LA] Хилл, Дж. Френч [R-AR] Хаймс, Джеймс А. [D-CT] Хинсон, Эшли [R-IA] Hollingsworth, Trey [R-IN] Horsford, Steven [D-NV] Houlahan, Chrissy [D-PA] Hoyer, Steny H.[D-MD] Хадсон, Ричард [R-NC] Хаффман, Джаред [D-CA] Хьюизенга, Билл [R-MI] Исса, Даррелл Э. [R-CA] Джексон, Ронни [R-TX] Джексон Ли, Шейла [D-TX] Джейкобс, Крис [R-NY] Джейкобс, Сара [D-CA] Jayapal, Pramila [D-WA] Джеффрис, Хаким С. [D-NY] Джонсон, Билл [R-OH] Джонсон, Дасти [R-SD] Джонсон, Эдди Бернис [D-TX] Джонсон, Генри К. «Хэнк» младший [D-GA] Джонсон, Майк [R-LA] Джонс, Mondaire [D-NY] Джордан, Джим [R-OH] Джойс, Дэвид П. [R-OH] Джойс, Джон [R-PA] Кахеле, Кайали [D-HI] Каптур, Марси [D-OH] Катко, Джон [R-NY] Китинг , Уильям Р.[D-MA] Келлер, Фред [R-PA] Келли, Майк [R-PA] Келли, Робин Л. [D-IL] Келли, Трент [R-MS] Кханна, Ро [D-CA] Килди, Дэниел Т. [D-MI] Килмер, Дерек [D-WA] Ким, Энди [D-NJ] Ким, Янг [R-CA] Kind, Рон [D-WI] Кинзингер, Адам [R-IL] Киркпатрик, Энн [D-AZ] Кришнамурти, Раджа [D-IL] Кустер, Энн М. [D-NH] Кустофф, Дэвид [R-TN] Лахуд, Дарин [R-IL] Ламальфа, Дуг [R-CA] Лэмб, Конор [D-PA] Лэмборн, Дуг [R-CO] Ланжевен, Джеймс Р. [D-RI] Ларсен, Рик [D-WA] Ларсон, Джон Б. [D-CT] Латта, Роберт Э. [R-OH ] Латернер, Джейк [R-KS] Лоуренс, Бренда Л.[D-MI] Лоусон, Эл, младший [D-FL] Ли, Барбара [D-CA] Ли, Сьюзи [D-NV] Леже Фернандес, Тереза [D-NM] Леско, Дебби [R-AZ] Летлоу , Джулия [R-LA] Левин, Энди [D-MI] Левин, Майк [D-CA] Лиу, Тед [D-CA] Лофгрен, Зои [D-CA] Лонг, Билли [R-MO] Лоудермилк, Барри [R-GA] Ловенталь, Алан С. [D-CA] Лукас, Фрэнк Д.
[R-TN] Грин, Марджори Тейлор [R-GA] Гриффит, Х. Морган [R-VA] Гриджалва, Рауль М. [D-AZ] Гротман, Гленн [R-WI] Гость, Майкл [R-MS] Гатри, Бретт [R-KY] Хааланд, Дебра А. [D-NM] Хагедорн, Джим [R-MN] Хардер, Джош [D-CA] Харрис, Энди [R-MD] Харшбаргер, Диана [R-TN] Хартцлер, Вики [R-MO] Гастингс, Элси Л. [D-FL] Хейс, Джахана [D-CT] Херн, Кевин [R-OK] Херрелл, Иветт [R-NM] Эррера Бейтлер, Хайме [R-WA ] Хайс, Джоди Б. [R-GA] Хиггинс, Брайан [D-NY] Хиггинс, Клэй [R-LA] Хилл, Дж. Френч [R-AR] Хаймс, Джеймс А. [D-CT] Хинсон, Эшли [R-IA] Hollingsworth, Trey [R-IN] Horsford, Steven [D-NV] Houlahan, Chrissy [D-PA] Hoyer, Steny H.[D-MD] Хадсон, Ричард [R-NC] Хаффман, Джаред [D-CA] Хьюизенга, Билл [R-MI] Исса, Даррелл Э. [R-CA] Джексон, Ронни [R-TX] Джексон Ли, Шейла [D-TX] Джейкобс, Крис [R-NY] Джейкобс, Сара [D-CA] Jayapal, Pramila [D-WA] Джеффрис, Хаким С. [D-NY] Джонсон, Билл [R-OH] Джонсон, Дасти [R-SD] Джонсон, Эдди Бернис [D-TX] Джонсон, Генри К. «Хэнк» младший [D-GA] Джонсон, Майк [R-LA] Джонс, Mondaire [D-NY] Джордан, Джим [R-OH] Джойс, Дэвид П. [R-OH] Джойс, Джон [R-PA] Кахеле, Кайали [D-HI] Каптур, Марси [D-OH] Катко, Джон [R-NY] Китинг , Уильям Р.[D-MA] Келлер, Фред [R-PA] Келли, Майк [R-PA] Келли, Робин Л. [D-IL] Келли, Трент [R-MS] Кханна, Ро [D-CA] Килди, Дэниел Т. [D-MI] Килмер, Дерек [D-WA] Ким, Энди [D-NJ] Ким, Янг [R-CA] Kind, Рон [D-WI] Кинзингер, Адам [R-IL] Киркпатрик, Энн [D-AZ] Кришнамурти, Раджа [D-IL] Кустер, Энн М. [D-NH] Кустофф, Дэвид [R-TN] Лахуд, Дарин [R-IL] Ламальфа, Дуг [R-CA] Лэмб, Конор [D-PA] Лэмборн, Дуг [R-CO] Ланжевен, Джеймс Р. [D-RI] Ларсен, Рик [D-WA] Ларсон, Джон Б. [D-CT] Латта, Роберт Э. [R-OH ] Латернер, Джейк [R-KS] Лоуренс, Бренда Л.[D-MI] Лоусон, Эл, младший [D-FL] Ли, Барбара [D-CA] Ли, Сьюзи [D-NV] Леже Фернандес, Тереза [D-NM] Леско, Дебби [R-AZ] Летлоу , Джулия [R-LA] Левин, Энди [D-MI] Левин, Майк [D-CA] Лиу, Тед [D-CA] Лофгрен, Зои [D-CA] Лонг, Билли [R-MO] Лоудермилк, Барри [R-GA] Ловенталь, Алан С. [D-CA] Лукас, Фрэнк Д. [R-OK] Люткемейер, Блейн [R-MO] Лурия, Элейн Г. [D-VA] Линч, Стивен Ф. [D -MA] Мейс, Нэнси [R-SC] Малиновски, Том [D-NJ] Маллиотакис, Николь [R-NY] Мэлони, Кэролин Б. [D-NY] Мэлони, Шон Патрик [D-NY] Манн, Трейси [ R-KS] Мэннинг, Кэти Э.[D-NC] Мэсси, Томас [R-KY] Маст, Брайан Дж. [R-FL] Мацуи, Дорис О. [D-CA] МакБэт, Люси [D-GA] Маккарти, Кевин [R-CA] МакКол , Майкл Т. [R-TX] Макклейн, Лиза К. [R-MI] МакКлинток, Том [R-CA] МакКоллум, Бетти [D-MN] МакИчин, А. Дональд [D-VA] Макговерн, Джеймс П. [D-MA] МакГенри, Патрик Т. [R-NC] МакКинли, Дэвид Б. [R-WV] МакМоррис Роджерс, Кэти [R-WA] Макнерни, Джерри [D-CA] Микс, Грегори В. [D- NY] Мейер, Питер [R-MI] Мэн, Грейс [D-NY] Meuser, Daniel [R-PA] Mfume, Kweisi [D-MD] Миллер, Кэрол Д. [R-WV] Миллер, Мэри Э. [ R-IL] Миллер-Микс, Марианнетт [R-IA] Мооленаар, Джон Р.[R-MI] Муни, Александр X. [R-WV] Мур, Барри [R-AL] Мур, Блейк Д. [R-UT] Мур, Гвен [D-WI] Морелл, Джозеф Д. [D-NY ] Моултон, Сет [D-MA] Мрван, Фрэнк Дж. [D-IN] Маллин, Маркуэйн [R-OK] Мерфи, Грегори [R-NC] Мерфи, Стефани Н. [D-FL] Надлер, Джерролд [D -NY] Наполитано, Грейс Ф. [D-CA] Нил, Ричард Э. [D-MA] Негусе, Джо [D-CO] Нелс, Трой Э. [R-TX] Ньюхаус, Дэн [R-WA] Ньюман , Мари [D-IL] Норкросс, Дональд [D-NJ] Норман, Ральф [R-SC] Нортон, Элеонора Холмс [D-DC] Нуньес, Девин [R-CA] О’Халлеран, Том [D-AZ] Обернолти, Джей [R-CA] Окасио-Кортес, Александрия [D-NY] Омар, Ильхан [D-MN] Оуэнс, Берджесс [R-UT] Палаццо, Стивен М.[R-MS] Паллоне, Фрэнк, младший [D-NJ] Палмер, Гэри Дж. [R-AL] Панетта, Джимми [D-CA] Паппас, Крис [D-NH] Паскрелл, Билл, мл. [D -NJ] Пейн, Дональд М., младший [D-NJ] Пелоси, Нэнси [D-CA] Пенс, Грег [R-IN] Перлмуттер, Эд [D-CO] Перри, Скотт [R-PA] Питерс, Скотт Х. [D-CA] Пфлюгер, Август [R-TX] Филлипс, Дин [D-MN] Пингри, Челли [D-ME] Пласкетт, Стейси Э. [D-VI] Покан, Марк [D-WI] Портер, Кэти [D-CA] Поузи, Билл [R-FL] Прессли, Аянна [D-MA] Прайс, Дэвид Э. [D-NC] Куигли, Майк [D-IL] Радваген, Аумуа Амата Коулман [R- AS] Раскин, Джейми [D-MD] Рид, Том [R-NY] Решенталер, Гай [R-PA] Райс, Кэтлин М.
[R-OK] Люткемейер, Блейн [R-MO] Лурия, Элейн Г. [D-VA] Линч, Стивен Ф. [D -MA] Мейс, Нэнси [R-SC] Малиновски, Том [D-NJ] Маллиотакис, Николь [R-NY] Мэлони, Кэролин Б. [D-NY] Мэлони, Шон Патрик [D-NY] Манн, Трейси [ R-KS] Мэннинг, Кэти Э.[D-NC] Мэсси, Томас [R-KY] Маст, Брайан Дж. [R-FL] Мацуи, Дорис О. [D-CA] МакБэт, Люси [D-GA] Маккарти, Кевин [R-CA] МакКол , Майкл Т. [R-TX] Макклейн, Лиза К. [R-MI] МакКлинток, Том [R-CA] МакКоллум, Бетти [D-MN] МакИчин, А. Дональд [D-VA] Макговерн, Джеймс П. [D-MA] МакГенри, Патрик Т. [R-NC] МакКинли, Дэвид Б. [R-WV] МакМоррис Роджерс, Кэти [R-WA] Макнерни, Джерри [D-CA] Микс, Грегори В. [D- NY] Мейер, Питер [R-MI] Мэн, Грейс [D-NY] Meuser, Daniel [R-PA] Mfume, Kweisi [D-MD] Миллер, Кэрол Д. [R-WV] Миллер, Мэри Э. [ R-IL] Миллер-Микс, Марианнетт [R-IA] Мооленаар, Джон Р.[R-MI] Муни, Александр X. [R-WV] Мур, Барри [R-AL] Мур, Блейк Д. [R-UT] Мур, Гвен [D-WI] Морелл, Джозеф Д. [D-NY ] Моултон, Сет [D-MA] Мрван, Фрэнк Дж. [D-IN] Маллин, Маркуэйн [R-OK] Мерфи, Грегори [R-NC] Мерфи, Стефани Н. [D-FL] Надлер, Джерролд [D -NY] Наполитано, Грейс Ф. [D-CA] Нил, Ричард Э. [D-MA] Негусе, Джо [D-CO] Нелс, Трой Э. [R-TX] Ньюхаус, Дэн [R-WA] Ньюман , Мари [D-IL] Норкросс, Дональд [D-NJ] Норман, Ральф [R-SC] Нортон, Элеонора Холмс [D-DC] Нуньес, Девин [R-CA] О’Халлеран, Том [D-AZ] Обернолти, Джей [R-CA] Окасио-Кортес, Александрия [D-NY] Омар, Ильхан [D-MN] Оуэнс, Берджесс [R-UT] Палаццо, Стивен М.[R-MS] Паллоне, Фрэнк, младший [D-NJ] Палмер, Гэри Дж. [R-AL] Панетта, Джимми [D-CA] Паппас, Крис [D-NH] Паскрелл, Билл, мл. [D -NJ] Пейн, Дональд М., младший [D-NJ] Пелоси, Нэнси [D-CA] Пенс, Грег [R-IN] Перлмуттер, Эд [D-CO] Перри, Скотт [R-PA] Питерс, Скотт Х. [D-CA] Пфлюгер, Август [R-TX] Филлипс, Дин [D-MN] Пингри, Челли [D-ME] Пласкетт, Стейси Э. [D-VI] Покан, Марк [D-WI] Портер, Кэти [D-CA] Поузи, Билл [R-FL] Прессли, Аянна [D-MA] Прайс, Дэвид Э. [D-NC] Куигли, Майк [D-IL] Радваген, Аумуа Амата Коулман [R- AS] Раскин, Джейми [D-MD] Рид, Том [R-NY] Решенталер, Гай [R-PA] Райс, Кэтлин М. [D-NY] Райс, Том [R-SC] Ричмонд, Седрик Л. [D-LA] Роджерс, Гарольд [R-KY] Роджерс, Майк Д. [R-AL] Роуз, Джон В. [R-TN ] Розендейл старший, Мэтью М. [R-MT] Росс, Дебора К. [D-NC] Роузер, Дэвид [R-NC] Рой, Чип [R-TX] Ройбал-Аллард, Люсиль [D-CA] Руис , Рауль [D-CA] Рупперсбергер, Калифорния Датч [D-MD] Раш, Бобби Л. [D-IL] Резерфорд, Джон Х. [R-FL] Райан, Тим [D-OH] Саблан, Грегорио Килили Камачо [ D-MP] Салазар, Мария Эльвира [R-FL] Санчес, Линда Т. [D-CA] Сан-Николас, Майкл FQ [D-GU] Сарбейнс, Джон П. [D-MD] Скализ, Стив [R-LA ] Скэнлон, Мэри Гей [D-PA] Шаковски, Дженис Д.[D-IL] Шифф, Адам Б. [D-CA] Шнайдер, Брэдли Скотт [D-IL] Шрейдер, Курт [D-OR] Шрайер, Ким [D-WA] Швейкерт, Дэвид [R-AZ] Скотт, Остин [R-GA] Скотт, Дэвид [D-GA] Скотт, Роберт С. «Бобби» [D-VA] Сешнс, Пит [R-TX] Сьюэлл, Терри А. [D-AL] Шерман, Брэд [D -CA] Шерилл, Мики [D-NJ] Симпсон, Майкл К. [R-ID] Sires, Альбио [D-NJ] Slotkin, Элисса [D-MI] Смит, Адам [D-WA] Смит, Адриан [R -NE] Смит, Кристофер Х. [R-NJ] Смит, Джейсон [R-MO] Смакер, Ллойд [R-PA] Сото, Даррен [D-FL] Спанбергер, Эбигейл Дэвис [D-VA] Спарц, Виктория [ R-IN] Шпейер, Джеки [D-CA] Стэнтон, Грег [D-AZ] Стаубер, Пит [R-MN] Стил, Мишель [R-CA] Стефаник, Элиза М.[R-NY] Стейл, Брайан [R-WI] Steube, В. Грегори [R-FL] Стивенс, Хейли М. [D-MI] Стюарт, Крис [R-UT] Стиверс, Стив [R-OH] Стрикленд , Мэрилин [D-WA] Суоззи, Томас Р. [D-NY] Swalwell, Эрик [D-CA] Такано, Марк [D-CA] Тейлор, Ван [R-TX] Тенни, Клаудия [R-NY] Томпсон , Бенни Г. [D-MS] Томпсон, Гленн [R-PA] Томпсон, Майк [D-CA] Тиффани, Томас П. [R-WI] Тиммонс, Уильям Р. IV [R-SC] Титус, Дина [ D-NV] Тлайб, Рашида [D-MI] Тонко, Пол [D-NY] Торрес, Норма Дж. [D-CA] Торрес, Ричи [D-NY] Трахан, Лори [D-MA] Трон, Дэвид Дж. .[D-MD] Тернер, Майкл Р. [R-OH] Андервуд, Лорен [D-IL] Аптон, Фред [R-MI] Валадао, Дэвид Г. [R-CA] Ван Дрю, Джефферсон [R-NJ] Ван Дайн, Бет [R-TX] Варгас, Хуан [D-CA] Визи, Марк А. [D-TX] Вела, Филемон [D-TX] Веласкес, Нидия М. [D-NY] Вагнер, Ann [R -MO] Уолберг, Тим [R-MI] Валорски, Джеки [R-IN] Вальс, Майкл [R-FL] Вассерман Шульц, Дебби [D-FL] Уотерс, Максин [D-CA] Уотсон Коулман, Бонни [D -NJ] Вебер, Рэнди К.
 , старший [R-TX] Вебстер, Дэниел [R-FL] Велч, Питер [D-VT] Венструп, Брэд Р. [R-OH] Вестерман, Брюс [R-AR] Векстон, Дженнифер [D-VA] Уайлд, Сьюзан [D-PA] Уильямс, Nikema [D-GA] Уильямс, Роджер [R-TX] Уилсон, Фредерика С.[D-FL] Уилсон, Джо [R-SC] Виттман, Роберт Дж. [R-VA] Womack, Стив [R-AR] Райт, Рон [R-TX] Ярмут, Джон А. [D-KY] Янг , Дон [R-AK] Зельдин, Ли М. [R-NY] Любой член Сената Болдуин, Тэмми [D-WI] Баррассо, Джон [R-WY] Беннет, Майкл Ф. [D-CO] Блэкберн, Марша [ R-TN] Блюменталь, Ричард [D-CT] Блант, Рой [R-MO] Букер, Кори А. [D-NJ] Бузман, Джон [R-AR] Браун, Майк [R-IN] Браун, Шеррод [ D-OH] Берр, Ричард [R-NC] Кантуэлл, Мария [D-WA] Капито, Шелли Мур [R-WV] Кардин, Бенджамин Л. [D-MD] Карпер, Томас Р. [D-DE] Кейси , Роберт П., Младший [D-PA] Кэссиди, Билл [R-LA] Коллинз, Сьюзан М. [R-ME] Кунс, Кристофер А. [D-DE] Корнин, Джон [R-TX] Кортес Масто, Кэтрин [D -NV] Коттон, Том [R-AR] Крамер, Кевин [R-ND] Крапо, Майк [R-ID] Круз, Тед [R-TX] Дейнс, Стив [R-MT] Дакворт, Тэмми [D-IL ] Дурбин, Ричард Дж. [D-IL] Эрнст, Джони [R-IA] Файнштейн, Dianne [D-CA] Фишер, Деб [R-NE] Гиллибранд, Кирстен Э. [D-NY] Грэм, Линдси [R -SC] Грассли, Чак [R-IA] Хагерти, Билл [R-TN] Харрис, Камала Д. [D-CA] Хассан, Маргарет Вуд [D-NH] Хоули, Джош [R-MO] Генрих, Мартин [ D-NM] Гикенлупер, Джон В.[D-CO] Хироно, Мази К. [D-HI] Хувен, Джон [R-ND] Хайд-Смит, Синди [R-MS] Инхоф, Джеймс М. [R-OK] Джонсон, Рон [R-WI ] Кейн, Тим [D-VA] Келли, Марк [D-AZ] Кеннеди, Джон [R-LA] Кинг, Ангус С., младший [I-ME] Klobuchar, Amy [D-MN] Ланкфорд, Джеймс [ R-OK] Лихи, Патрик Дж. [D-VT] Ли, Майк [R-UT] Леффлер, Келли [R-GA] Лухан, Бен Рэй [D-NM] Ламмис, Синтия М. [R-WY] Манчин , Джо, III [D-WV] Марки, Эдвард Дж. [D-MA] Маршалл, Роджер В. [R-KS] МакКоннелл, Митч [R-KY] Менендес, Роберт [D-NJ] Меркли, Джефф [D -ИЛИ] Моран, Джерри [R-KS] Мурковски, Лиза [R-AK] Мерфи, Кристофер [D-CT] Мюррей, Пэтти [D-WA] Оссофф, Джон [D-GA] Падилья, Алекс [D-CA ] Пол, Рэнд [R-KY] Питерс, Гэри К.[D-MI] Портман, Роб [R-OH] Рид, Джек [D-RI] Риш, Джеймс Э.
, старший [R-TX] Вебстер, Дэниел [R-FL] Велч, Питер [D-VT] Венструп, Брэд Р. [R-OH] Вестерман, Брюс [R-AR] Векстон, Дженнифер [D-VA] Уайлд, Сьюзан [D-PA] Уильямс, Nikema [D-GA] Уильямс, Роджер [R-TX] Уилсон, Фредерика С.[D-FL] Уилсон, Джо [R-SC] Виттман, Роберт Дж. [R-VA] Womack, Стив [R-AR] Райт, Рон [R-TX] Ярмут, Джон А. [D-KY] Янг , Дон [R-AK] Зельдин, Ли М. [R-NY] Любой член Сената Болдуин, Тэмми [D-WI] Баррассо, Джон [R-WY] Беннет, Майкл Ф. [D-CO] Блэкберн, Марша [ R-TN] Блюменталь, Ричард [D-CT] Блант, Рой [R-MO] Букер, Кори А. [D-NJ] Бузман, Джон [R-AR] Браун, Майк [R-IN] Браун, Шеррод [ D-OH] Берр, Ричард [R-NC] Кантуэлл, Мария [D-WA] Капито, Шелли Мур [R-WV] Кардин, Бенджамин Л. [D-MD] Карпер, Томас Р. [D-DE] Кейси , Роберт П., Младший [D-PA] Кэссиди, Билл [R-LA] Коллинз, Сьюзан М. [R-ME] Кунс, Кристофер А. [D-DE] Корнин, Джон [R-TX] Кортес Масто, Кэтрин [D -NV] Коттон, Том [R-AR] Крамер, Кевин [R-ND] Крапо, Майк [R-ID] Круз, Тед [R-TX] Дейнс, Стив [R-MT] Дакворт, Тэмми [D-IL ] Дурбин, Ричард Дж. [D-IL] Эрнст, Джони [R-IA] Файнштейн, Dianne [D-CA] Фишер, Деб [R-NE] Гиллибранд, Кирстен Э. [D-NY] Грэм, Линдси [R -SC] Грассли, Чак [R-IA] Хагерти, Билл [R-TN] Харрис, Камала Д. [D-CA] Хассан, Маргарет Вуд [D-NH] Хоули, Джош [R-MO] Генрих, Мартин [ D-NM] Гикенлупер, Джон В.[D-CO] Хироно, Мази К. [D-HI] Хувен, Джон [R-ND] Хайд-Смит, Синди [R-MS] Инхоф, Джеймс М. [R-OK] Джонсон, Рон [R-WI ] Кейн, Тим [D-VA] Келли, Марк [D-AZ] Кеннеди, Джон [R-LA] Кинг, Ангус С., младший [I-ME] Klobuchar, Amy [D-MN] Ланкфорд, Джеймс [ R-OK] Лихи, Патрик Дж. [D-VT] Ли, Майк [R-UT] Леффлер, Келли [R-GA] Лухан, Бен Рэй [D-NM] Ламмис, Синтия М. [R-WY] Манчин , Джо, III [D-WV] Марки, Эдвард Дж. [D-MA] Маршалл, Роджер В. [R-KS] МакКоннелл, Митч [R-KY] Менендес, Роберт [D-NJ] Меркли, Джефф [D -ИЛИ] Моран, Джерри [R-KS] Мурковски, Лиза [R-AK] Мерфи, Кристофер [D-CT] Мюррей, Пэтти [D-WA] Оссофф, Джон [D-GA] Падилья, Алекс [D-CA ] Пол, Рэнд [R-KY] Питерс, Гэри К.[D-MI] Портман, Роб [R-OH] Рид, Джек [D-RI] Риш, Джеймс Э.