Робот-манипулятор: описание и принцип работы
Робототехника является одной из ведущих отраслей технологического и экономического развития различных государств. Робототехнические комплексы содействуют ускорению производства, повышению качества продукции и самое главное помогают исключить человеческий фактор. Промышленные манипуляторы способствуют повышению безопасности на объекте, особенно при опасных условиях производства.
Впервые о практическом применении современных роботов начали говорить в эллинистический период. В то время проектировались небольшие статуи, которые могли издавать различные звуки, поворачиваться и выполнять другие функции. Первый человекоподобный робот был спроектирован примерно в 1490 году. Со временем появлялось все больше уникальных «умных» механизмов, которые могли в точности копировать действия человека. В XX веке стали повсеместно внедрять промышленный пневматический манипулятор с программным управлением.
В настоящее время робототехника развивается стремительными темпами.
Что такое роботы манипуляторы и как они устроены?
В области автоматизации современного производства важное место занимают робототехнические устройства. Их разработка и интеграция позволит производственным холдинговым предприятиям выйти на новый уровень за счет перераспределения обязанностей между техникой и работником.
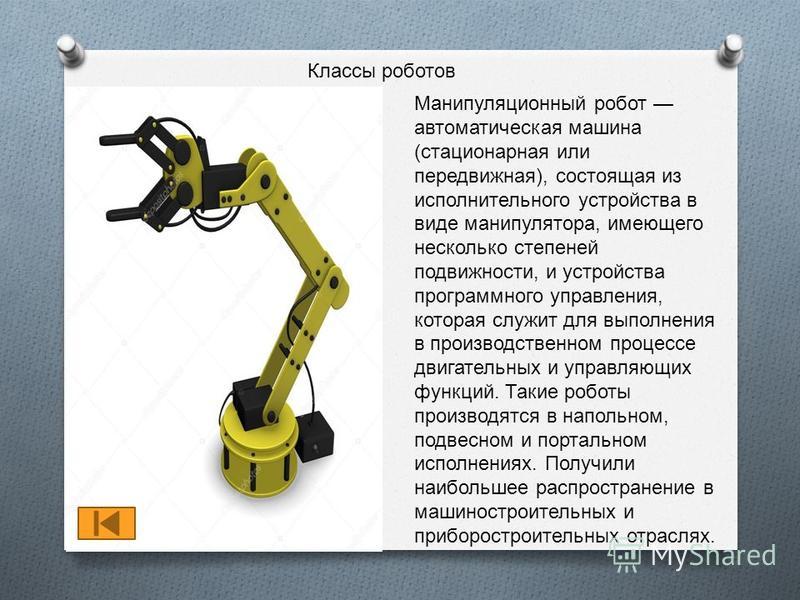
Робот-манипулятор представляет собой высокопроизводительную автоматизированную систему, которая функционирует за счет электронной платформы управления. Представленная техника может быть как четырехосевой, так и шестиосевой. Современные модели превосходно копируют движение человеческой руки, в частности, перемещение, вращение, сжатие, наклоны и так далее.
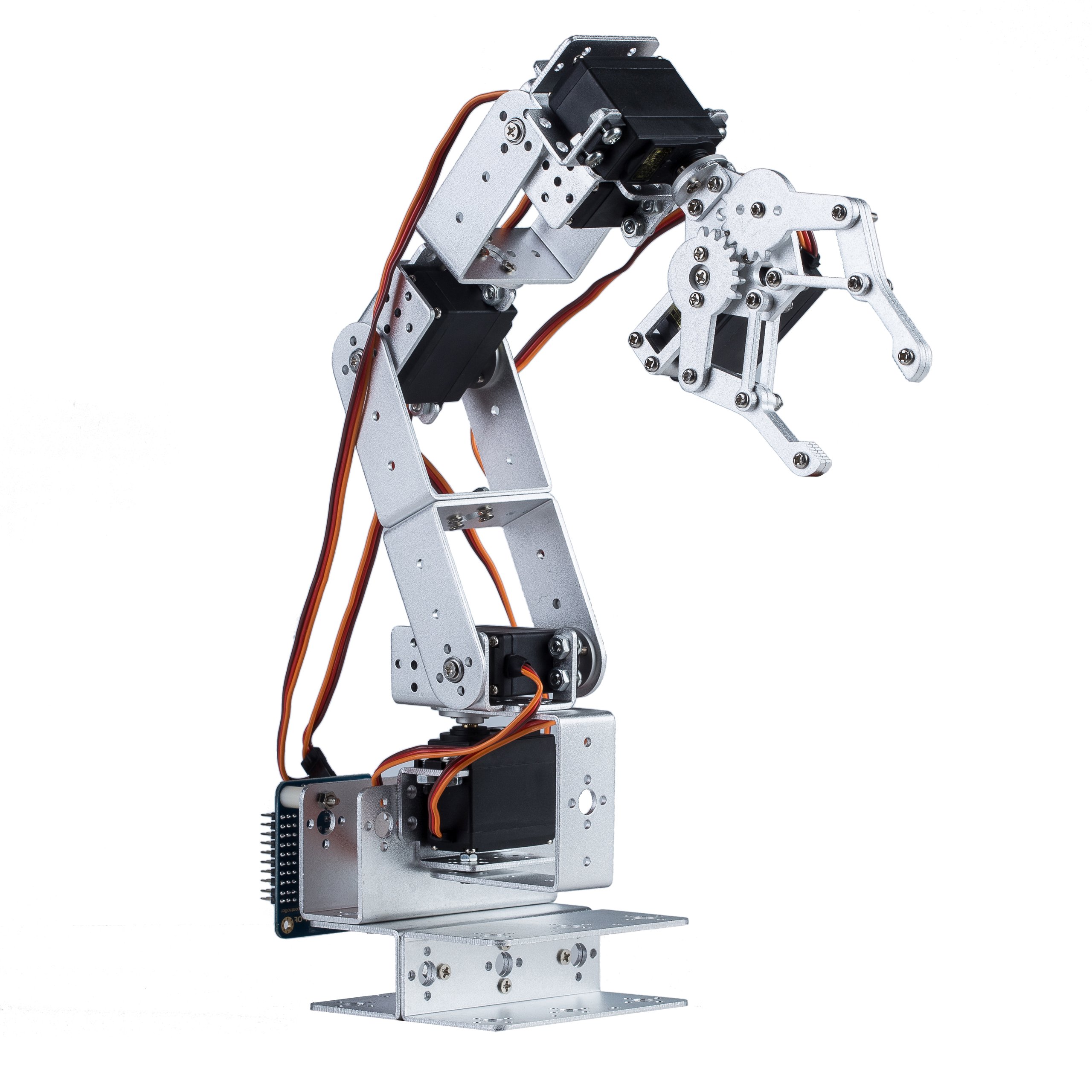
Устройство робота-манипулятора
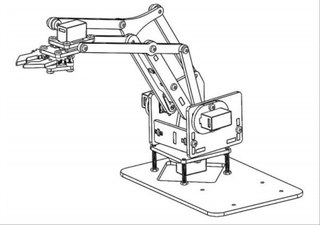
Робототехническое устройство выполнено из нескольких металлических элементов – шарниров. Именно они обеспечивают возможность вращательного и линейного движения. К основному элементу можно отнести рабочий орган, то есть базовую систему манипулятора, которая может выполнять различные функции, например, сверление, регулировку, обхват, поворот, перенос. Среди остальных элементов также выделяются приводы, которые бывают пневматическими, гидравлическими и электрическими. Все они отличаются по мощности и производительности.
К остальным не менее важным комплектующим элементам манипулятора робота относится электронная начинка. Она представляет собой специальный программный продукт, который необходим для автоматизированного управления роботом-манипулятором. Благодаря функциональным возможностям микроконтроллера и специальному программному обеспечению процесс управления становится легкодоступным для работников производственных предприятий и холдинговых объединений.
Мы рассмотрели базовые элементы оборудования и то, как устроен робот-манипулятор. Дополнительно они могут быть оснащены другими комплектующими в зависимости от назначения и пожелания заказчика. Сегодня наиболее популярны модели, которые могут управляться дистанционно на расстоянии.
В чем отличие между манипулятором и роботом?
Роботы представляют собой современные автоматизированные устройства для выполнения технологических операций в процессе промышленного производства. Манипуляторы же являют собой систему приводов и различных рычажных механизмов, которые приводятся в действие за счет программируемой системы. Получается, что манипулятор – это базовая составляющая, которая необходима для приведения робототехники в движение.
Преимущества программируемых роботов-манипуляторов
- Многофункциональность. Профессиональные «умные» устройства незаменимы при укладке коробок в паллеты, автоматизированном паллетировании, решении различных логистических задач, транспортировке товаров или материалов на производстве.
- Повышение качества. Интеграция роботов манипуляторов на производстве позволяет максимально точно выполнять задачи без каких-либо неточностей и ошибок. Внедрение усовершенствованных технологий помогает полностью исключить человеческий фактор.
- Ускорение производственных процессов. Роботизированные системы оперативно выполняют задачи по сборке и упаковке. В отличие от обычных работников специализированная техника помогает выполнять работу без остановки на высокой скорости.
Дополнительно можно отметить, что использование «умной» роботизированной техники содействует сокращению рабочих площадей и высвобождению специалистов для выполнения иных производственных операций.
Среди минусов данной системы можно выделить высокую цену промышленного манипулятора. Однако оборудование обладает быстрой окупаемостью. В течение двух лет можно полностью окупить роботизацию на предприятии.
На многих европейских предприятиях широко используется роботизированная техника и различные манипуляторы для роботов. Автоматизированная система незаменима в легкой и пищевой промышленности, хирургии, фармацевтике. В каждом конкретном случае можно подобрать подходящий манипулятор, который будет соответствовать функциональным требованиям данного предприятия. Современные модели отличаются производительностью и функциональностью, оснащены системой технического зрения, программируемыми контроллерами.
Автоматизированная система незаменима в легкой и пищевой промышленности, хирургии, фармацевтике. В каждом конкретном случае можно подобрать подходящий манипулятор, который будет соответствовать функциональным требованиям данного предприятия. Современные модели отличаются производительностью и функциональностью, оснащены системой технического зрения, программируемыми контроллерами.
Обеспечьте увеличение объемов производства и ускорение производственных процессов за счет современных роботов-манипуляторов!
Принцип работы | ROBOMATIC Промышленные роботы и автоматизация производства
В стандартной конфигурации промышленного робота обязательно присутствуют механическая часть (рука) и система управления этой механической частью (контроллер), которая в свою очередь получает сигналы от сенсорной части. Механическая часть робота делится на манипуляционную систему с захватным устройством или технологическим инструментом (запястье) и систему перемещения (плечо и суставы руки).
Манипулятор включает в себя подвижные звенья двух типов:
- звенья, обеспечивающие поступательные движения
- звенья, обеспечивающие вращательные перемещения
Сочетание и взаимное расположение звеньев определяет степень подвижности, а также область действия манипуляционной системы робота.
Для обеспечения движения в звеньях могут использоваться электрические, гидравлические или пневматические приводы.
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные захватные устройства аналогичны руке человека — захват осуществляется при помощи механических «пальцев». Для захвата плоских предметов используются захватные устройства с пневматическими присосками. Для захвата же множества однотипных деталей (что обычно и происходит при применении роботов в промышленности) применяют специализированные конструкции с множеством захватных приспособлений.
Вместо захватных устройств манипулятор может быть оснащен рабочим инструментом. Это может быть сварочная горелка или клещи, лазерная головка, пульверизатор и т. д.
Это может быть сварочная горелка или клещи, лазерная головка, пульверизатор и т. д.
Система управления манипулятором, как правило, включает в себя несколько уровней:
- Программное управление — управление роботом осуществляется при помощи предварительно написанной управляющей программы, аналогично станкам с ЧПУ.
- Адаптивное управление — роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются, и в зависимости от результатов измерений принимается решение о дальнейших действиях.
- Управление, основанное на методах искусственного интеллекта – может включать в себя алгоритмы технического зрения, алгоритмы поиска и т.п.
- Управление человеком (например, дистанционное управление при помощи специального пульта).
Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом. Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её.
В процессе работы робот также может взаимодействовать и обмениваться сигналами с другим оборудованием и средствами автоматизации: сенсорными системами, системами технического зрения, программируемыми контроллерами, транспортными системами, оборудованием для сварки и резки и др.
Манипуляторы, автооператоры и промышленные роботы.
 Термины и определения – РТС-тендер
Термины и определения – РТС-тендер
ГОСТ 25686-85*
Группа Г00
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
ОКП 38 7500
Постановлением Государственного комитета СССР по стандартам от 28 июня 1985 г. N 2077 срок действия установлен с 01.01.86 до 01.01.91**
________________
** Ограничение срока действия снято постановлением Госстандарта СССР от 30.05.90 N 1349 (ИУС N 8, 1990 год). — Примечание изготовителя базы данных.
ВЗАМЕН ГОСТ 25686-83; ГОСТ 21024-75
* ПЕРЕИЗДАНИЕ (декабрь 1987 г.) с Изменением N 1, утвержденным в декабре 1985 г. (ИУС N 3-86).
Настоящий стандарт устанавливает применяемые в науке, технике и производстве термины и определения основных понятий в области манипуляторов, автооператоров и промышленных роботов.
Термины, установленные стандартом, обязательны для применения в документации всех видов, научно-технической, учебной и справочной литературе.
Настоящий стандарт следует применять совместно с ГОСТ 23887-79.
(Измененная редакция, Изм. N 1).
Для каждого понятия установлен один стандартизованный термин. Применение терминов-синонимов стандартизованного термина запрещается.
Для стандартизованных терминов в стандарте приведены в качестве справочных краткие формы, которые разрешается применять, когда исключена возможность их различного толкования.
Установленные определения можно, при необходимости, изменять по форме изложения, не допуская нарушения границ понятий.
В стандарте приведен алфавитный указатель содержащихся в нем терминов.
Стандартизованные термины набраны полужирным шрифтом, их краткие формы — светлым.
Термин | Определение |
1. | Управляемые устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом |
2. Манипулятор с ручным управлением | Манипулятор, управление которым осуществляет оператор |
3. Сбалансированный манипулятор | Манипулятор с ручным управлением, содержащий систему уравновешивания устройства рабочего органа |
4. Автооператор | Автоматическая машина, состоящая из исполнительного устройства в виде манипулятора или совокупности манипулятора и устройства передвижения и неперепрограммируемого устройства управления |
 Манипулятор
Манипулятор2. ПРОМЫШЛЕННЫЕ РОБОТЫ
Термин | Определение |
5. | Автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций. Примечание. Перепрограммируемость — свойство промышленного робота заменять управляющую программу автоматически или при помощи человека-оператора. К перепрограммированию относится изменение последовательности и (или) значений перемещений по степеням подвижности и управляющих функций с помощью средств управления на пульте устройства управления |
6. Промышленный робот с цикловым программным управлением ПРЦПУ | — |
7. ПРЧПУ | Промышленный робот, управляемый устройством ЧПУ с позиционным и (или) контурным программным управлением |
8. Адаптивный промышленный робот | Промышленный робот, управляемый устройством адаптивного управления |
8а. Агрегатный промышленный робот | Промышленный робот, в котором по крайней мере исполнительное устройство изготовлено путем агрегатирования из деталей, узлов и агрегатов, входящих в унифицированный набор для построения определенных модификаций промышленных роботов. Примечания: 1. Унифицированный набор — совокупность унифицированных составных частей для сборки путем их выбора и различной компановки установленной группы изделий различного назначения. 2. В состав исполнительного устройства промышленного робота, изготовленного путем агрегатирования, дополнительно входят цепи энергопитания и управления, если они не предусмотрены в конструкции узлов и агрегатов, входящих в унифицированный набор |
8б. Агрегатно-модульный промышленный робот | Агрегатный промышленный робот, в котором используют исполнительные модули |
УПРАВЛЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ | |
9. Управляющая программа | По ГОСТ 19781-83* |
______________ * На территории Российской Федерации действует ГОСТ 19781-90. — Примечание изготовителя базы данных. | |
10. | Автоматическое управление исполнительным устройством промышленного робота по заранее введенной управляющей программе |
11. Цикловое управление промышленным роботом | Управление исполнительным устройством промышленного робота, при котором осуществляется программирование последовательности выполнения его движения |
12. Позиционное управление промышленным роботом | Управление исполнительным устройством промышленного робота, при котором движение его рабочего органа происходит по заданным точкам позиционирования без контроля траектории движения между ними |
13. Контурное управление промышленным роботом | Управление исполнительным устройством промышленного робота, при котором движение его рабочего органа происходит по заданной траектории с установленным распределением во времени значений скорости |
14. | Управление исполнительным устройством промышленного робота с автоматическим изменением управляющей программы в функции от контролируемых параметров состояния внешней среды |
15. Программирование промышленного робота | Составление, ввод и отладка управляющей программы промышленного робота |
16. Аналитическое программирование промышленного робота | Программирование промышленного робота, при котором управляющую программу составляют на основе расчета и затем заносят в устройство управления |
17. Обучение промышленного робота | Программирование промышленного робота, при котором составление и ввод управляющей программы осуществляет человек-оператор при помощи предварительного движения рабочего органа с занесением в устройство управления значений параметров этого движения в виде управляющей программы |
18. | Функционирование исполнительного устройства промышленного робота в соответствии с заданной управляющей программой |
 Промышленный робот
Промышленный робот Промышленный робот с числовым программным управлением
Промышленный робот с числовым программным управлением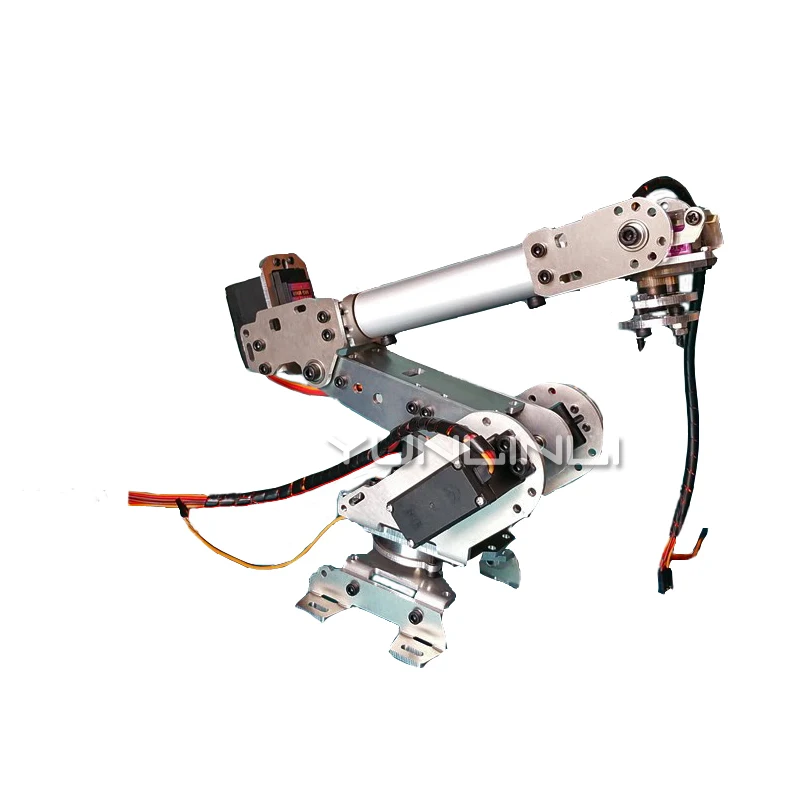
 Программное управление промышленным роботом
Программное управление промышленным роботом Адаптивное управление промышленным роботом
Адаптивное управление промышленным роботом3. СОСТАВНЫЕ ЧАСТИ ПРОМЫШЛЕННЫХ РОБОТОВ, АВТООПЕРАТОРОВ
Термин | Определение |
19. Исполнительное устройство промышленного робота (автооператора) | Устройство промышленного робота (автооператора), выполняющее все его двигательные функции |
19а. Исполнительный модуль промышленного робота Исполнительный модуль | Агрегат, входящий в унифицированный набор, или образуемый из деталей и узлов этого набора, способный самостоятельно выполнять функцию реализации движений по одной или нескольким степеням подвижности промышленного робота. Примечания: 1. В исполнительном модуле промышленного робота движения реализуются при подключении его к внешним цепям энергопитания и управления. В общем случае в исполнительном модуле допускается использование автономного источника энергопитания. 2. Исполнительный модуль промышленного робота, реализующий движения по нескольким степеням подвижности, выполняют в единой конструкции и не разделяют на отдельные исполнительные модули |
20. Рабочий орган промышленного робота (автооператора) | Составная часть исполнительного устройства промышленного робота (автооператора) для непосредственного выполнения технологических операций и (или) вспомогательных переходов. Примечание. Примерами рабочего органа служат сварочные клещи, окрасочный пистолет, сборочный инструмент, захватное устройство |
21. | Устройство промышленного робота (автооператора) для формирования и выдачи управляющих воздействий исполнительному устройству в соответствии с управляющей программой |
 Устройство управления промышленного робота (автооператора)
Устройство управления промышленного робота (автооператора)4. ХАРАКТЕРИСТИКИ МАНИПУЛЯТОРОВ, АВТООПЕРАТОРОВ
И ПРОМЫШЛЕННЫХ РОБОТОВ
Термин | Определение |
22. Номинальная грузоподъемность манипулятора (автооператора, промышленного робота) | Наибольшее значение массы предметов производства или технологической оснастки, включая массу захватного устройства, при которой гарантируется их удержание и обеспечение установленных значений эксплуатационных характеристик |
23. Рабочее пространство манипулятора (автооператора, промышленного робота) | Пространство, в котором может находиться исполнительное устройство при функционировании манипулятора (автооператора, промышленного робота) |
24. | Пространство, в котором может находиться рабочий орган при функционировании манипулятора (автооператора, промышленного робота) |
25. Зона обслуживания манипулятора (автооператора, промышленного робота) | Пространство, в котором рабочий орган выполняет свои функции в соответствии с назначением манипулятора (автооператора, промышленного робота) и установленными значениями их характеристик |
26. Число степеней подвижности манипулятора (автооператора, промышленного робота) | — |
27. Скорость перемещения по степени подвижности | — |
28. | Отклонение положения рабочего органа манипулятора (автооператора, промышленного робота) от заданного управляющей программой |
29. Погрешность отработки траектории рабочего органа промышленного робота | Отклонение траектории рабочего органа промышленного робота от заданной управляющей программой |
 Рабочая зона манипулятора (автооператора, промышленного робота)
Рабочая зона манипулятора (автооператора, промышленного робота)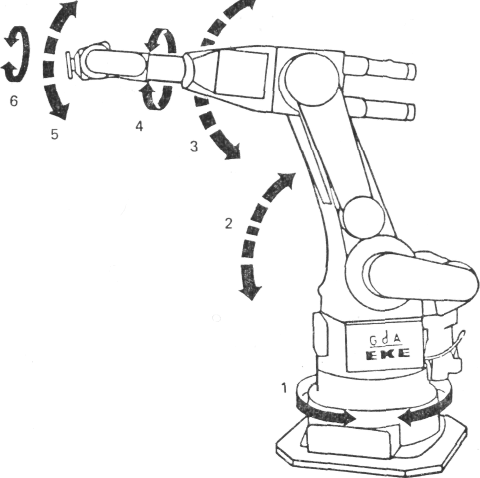 Погрешность позиционирования рабочего органа манипулятора (автооператора, промышленного робота)
Погрешность позиционирования рабочего органа манипулятора (автооператора, промышленного робота)(Измененная редакция, Изм. N 1).
Автооператор | 4 |
АПР | 8 |
Грузоподъемность манипулятора (автооператора, промышленного робота) номинальная | 22 |
Зона манипулятора (автооператора, промышленного робота) обслуживания | 25 |
Зона манипулятора (автооператора, промышленного робота) рабочая | 24 |
Исполнение управляющей программы промышленного робота | 18 |
Манипулятор | 1 |
Манипулятор сбалансированный | 3 |
Манипулятор с ручным управлением | 2 |
Модуль исполнительный | (19а) |
Модуль промышленного робота исполнительный | (19а) |
Обучение промышленного робота | 17 |
Орган промышленного робота (автооператора) рабочий | 20 |
Погрешность отработки траектории рабочего органа промышленного робота | 29 |
Погрешность позиционирования, рабочего органа манипулятора (автооператора, промышленного робота) | 28 |
Программа управляющая | 9 |
Программирование промышленного робота | 15 |
Программирование промышленного робота аналитическое | 16 |
Пространство манипулятора (автооператора, промышленного робота) рабочее | 23 |
ПРЦПУ | 6 |
ПРЧПУ | 7 |
Робот промышленный | 5 |
Робот промышленный агрегатный | (8а) |
Робот промышленный агрегатно-модульный | (8б) |
Робот промышленный адаптивный | 8 |
Робот с цикловым программным управлением промышленный | 6 |
Робот с числовым программным управлением промышленный | 7 |
Скорость перемещения по степени подвижности | 27 |
Управление промышленным роботом адаптивное | 14 |
Управление промышленным роботом контурное | 13 |
Управление промышленным роботом позиционное | 12 |
Управление промышленным роботом программное | 10 |
Управление промышленным роботом цикловое | 11 |
Устройство промышленного робота (автооператора) исполнительное | 19 |
Устройство управления промышленного робота (автооператора) | 21 |
Число степеней подвижности манипулятора (автооператора, промышленного робота) | 26 |
Промышленные роботы.
 Виды и устройство. Работа и применение
Виды и устройство. Работа и применениеПромышленные роботы все чаще применяются на заводах и предприятиях. Их используют для осуществления функций управления, перемещения и движения в различных производственных процессах. Главная их особенность в том, что они не устают. Роботы могут работать круглосуточно без какого-либо участия человека, ведь для их функционирования нужна только заложенная программа, по которой они будут действовать. Они могут выполнять только определенные действия, но чаще всего их используют в автоматизированных производственных системах.
Благодаря использованию роботов удается создать полный цикл производства, который обеспечивает производительность и точность на весьма высоком уровне. Кроме того, практически полностью исключаются ошибки в производстве, которые так свойственны людям. Промышленная робототехника заявила о себе в 1961 году. Именно тогда был получен первый патент на робота. Однако первое серийное производство роботов началось в далеком в 1956 году.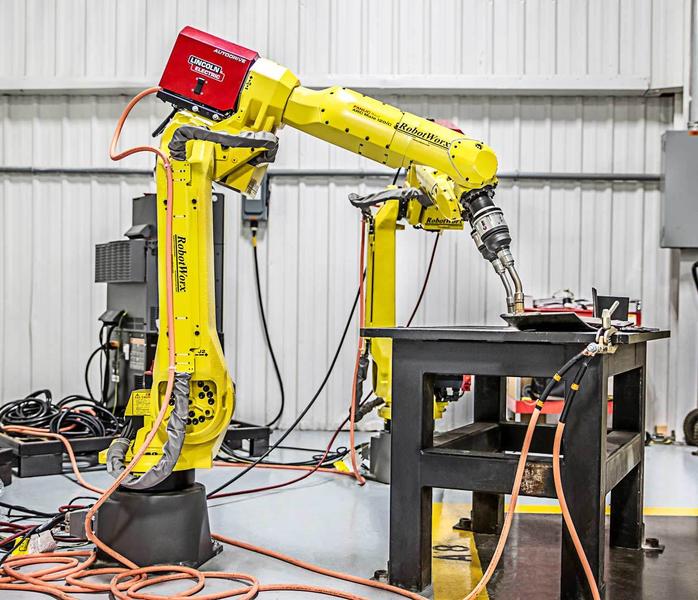 Основное развитие роботы для промышленности получили в 60-70-ых годах двадцатого века. Именно в этот период был создан прототип современного робота, который напоминал человеческую руку и имел шесть степеней свободы.
Основное развитие роботы для промышленности получили в 60-70-ых годах двадцатого века. Именно в этот период был создан прототип современного робота, который напоминал человеческую руку и имел шесть степеней свободы.
Виды
На текущий момент промышленные роботы условно можно поделить на три категории, в которых также можно выделить свои подвиды:
- Автоматические устройства. В эту категорию входят программные, адаптивные и биотехнические роботы:
— Программные представляют самую простейшую разновидность роботов, которые управляются автоматически. Эта разновидность широко применяется вследствие их не дороговизны. Они находят широкое применение на предприятиях для совершения простых операций по запланированной технологии. В большей части случаев у таких устройств нет сенсоров. При этом все действия производятся по циклической программе, которая заранее закладывается в блок памяти.
— Адаптивные.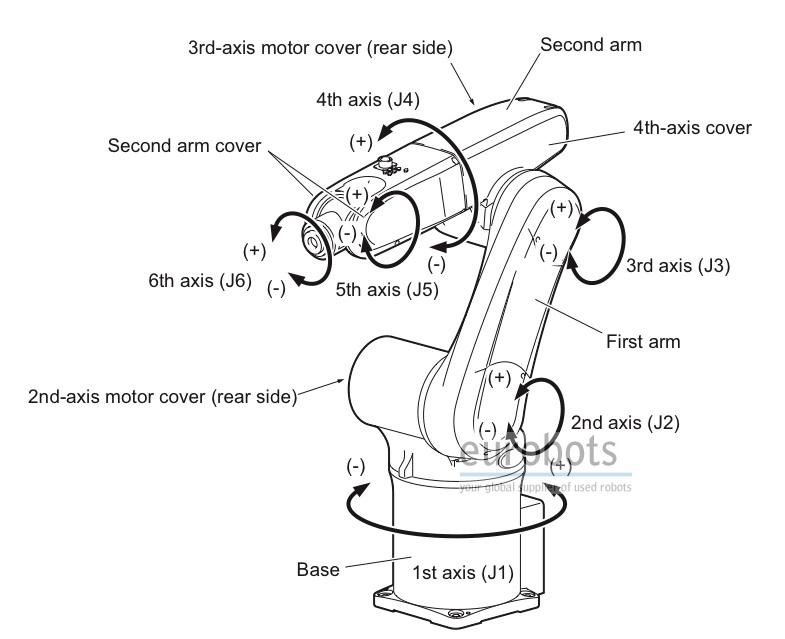 В отличие от первой разновидности такие роботы имеют сенсоры, а также ряд сопутствующих программ. Благодаря сигналам, которые идут к управляющей системе от всевозможных датчиков, происходит анализ окружающей обстановки. В результате полученных данных, робот может принимать решение, как ему действовать дальше. К примеру, он может начать выполнять другую операцию, если невозможно выполнить первую.
В отличие от первой разновидности такие роботы имеют сенсоры, а также ряд сопутствующих программ. Благодаря сигналам, которые идут к управляющей системе от всевозможных датчиков, происходит анализ окружающей обстановки. В результате полученных данных, робот может принимать решение, как ему действовать дальше. К примеру, он может начать выполнять другую операцию, если невозможно выполнить первую.
— Обучаемые. Подобные роботы способны учиться, то есть они выполняют действия согласно предыдущему обучению. К примеру, люди создают порядок действий, которые закладываются в блок управления робота.
— Интеллектуальные. Данные роботы имеют зачатки искусственного интеллекта, то есть они при помощи сенсорных датчиков могут без помощи людей воспринимать окружающую обстановку. То есть они создают виртуальное пространство, в котором могут ориентироваться и принимать решения о последующих действиях. То есть они могут обучаться по мере поступления опыта.
- Биотехнические устройства.
 В эту категорию входят командные, копирующие и полуавтоматические роботы.
В эту категорию входят командные, копирующие и полуавтоматические роботы.
— Командные. Это своего рода манипуляторы, которые дистанционно управляются оператором. Оператор подает команды на движение каждому его сочленению. Если говорить прямо, то это роботы только наполовину.
— Копирующие. Это манипуляторы, которые производят копирование действия, совершаемые оператором в заданный момент времени. К примеру, человек надевает перчатку и двигает пальцами, то и копирующий робот также будет двигать своими железными пальцами.
— Полуавтоматические. Для их управления оператору необходимо лишь задавать перемещение органа манипулятора. При этом система управления устройства сама согласует все необходимые движения и при необходимости выполнит их корректировку.
- Интерактивные промышленные роботы. В эту категорию входят автоматизированные, супервизорные и диалоговые роботы.
— Автоматизированные. Это роботы, где чередуются режимы автоматического управленческого процесса с биотехническими.
Это роботы, где чередуются режимы автоматического управленческого процесса с биотехническими.
— Супервизорные. Это роботы, которые выполняют работу автоматически по заданному циклу, однако перемещение от одного этапа к следующему осуществляется по командам оператора.
— Диалоговые. Это автоматические роботы различного действия, которые могут взаимодействовать с оператором, применяя язык определенного уровня. К примеру, с помощью команд голосом.
Промышленные роботы могут иметь различное устройство, что во многом определяется задачами, которые стоят перед ними. Однако на данный момент наиболее распространенными видами подобных устройств являются роботизированные манипуляторы.
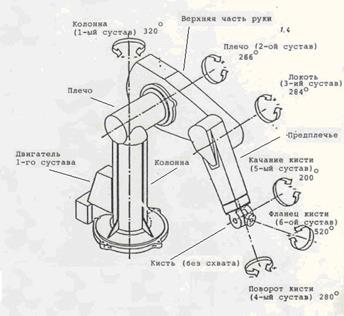
Стандартный манипулятор выполнен из семи сегментов, которые соединяются с помощью шести суставов. Каждый сегмент выполнен из металлического корпуса и проводов. В каждом сегменте присутствуют шаговые двигатели, которые заставляют суставы двигаться. Управление суставами и роботом в целом осуществляется с помощью компьютера, который заставляет вращаться конкретные шаговые двигатели. В некоторых манипуляторах вместо двигателей могут применяться пневматические или гидравлические элементы.
Главная особенность шаговых двигателей в том, что они могут обеспечивать очень точные движения. Если компьютер даст команду суставу передвинуться ровно на 15 мм, то двигатель сделает то, что от него попросят. При этом движение будет точным каждый раз при совершении одного и того же действия.
Чтобы контролировать, правильно ли робот выполняет необходимые действия, применяются датчики движения. Если происходит малейшее отклонение от заданной программы, то происходит корреляция движения. Если же наблюдается значительное отклонение и невозможность его исправления, то сигнал подается на главный компьютер. В результате робот может быть остановлен, чтобы его можно было отремонтировать.
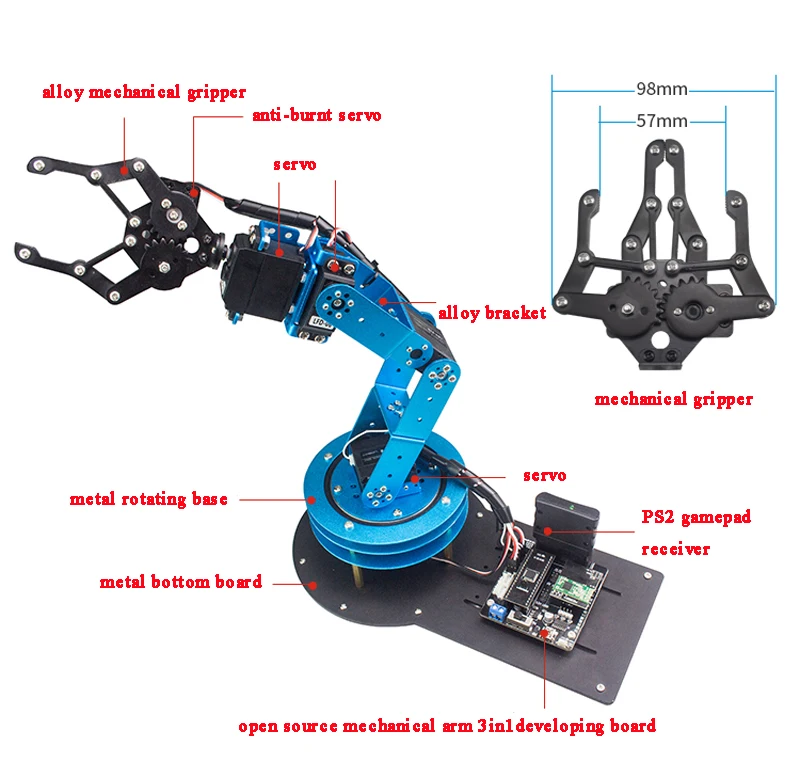
Манипулятор также имеет устройства захвата, которые выполнены в виде человеческой руки с механическими пальцами. При необходимости захвата плоского предмета вместо механических пальцев может применяться пневматическая присоска. В случае необходимости захвата множества деталей может быть задействована конструкция в виде приспособления, специально разработанная для этого. К тому же вместо захватного устройства могут применяться и иные рабочие инструменты, к примеру, пульверизатор, отвертка и так далее.
Промышленные роботы также могут перемещаться по колее, выполненной на полу в виде монорельсов. В случае необходимости движения по неровной поверхности, используются другие конструкции, к примеру, пневматические присоски и тому подобное. Для питания роботов может использоваться аккумулятор, но чаще всего применяется промышленная электрическая сеть. Для управления используется компьютер, который командует роботом через провода или беспроводную связь. Также в самих роботах может быть установлен блок памяти, куда записывается необходимая программа.
Принцип действияПромышленные роботы, которые имеют 6 суставов, внешне напоминают человеческую руку (плечо, локоть и запястье). В большинстве случаев плечо монтируется на неподвижной основе. В результате такой робот может иметь 6 степеней свободы, а это значит, что он способен двигаться по 6 различным направлениям.
Подобно человеческой руке манипулятор также перемещает концевой эффектор с одного места на другое. При оснащении концевого эффектора различными устройствами, у робота появляется возможность выполнять определенные технологические операции. Одним из наиболее распространенных вариантов является подобие руки, которая позволяет роботу хватать и перемещать объекты с места на место.
Довольно часто манипуляторы имеют встроенные датчики давления, благодаря чему они могут контролировать силу захвата и не ломать все подряд. К примеру, в задачу робота может входить перемещение лампочки с одного места на другое, чтобы проверить работает ли она. Если сила будет высока, то лампочка просто лопнет. Контролирование силы сжатия гарантирует, что лампочка не пострадает. При помощи других конечных эффекторов могут использоваться распылители порошка, различные дрели и так далее.
Управление такими роботами может быть выполнено:
- С помощью программы.
- Адаптивного управления. В этом случае используются сенсорные устройства. Получаемые сигналы анализируются, после чего уже выполняется необходимое действие.
- Управление осуществляется людьми, но на расстоянии.
- Своеобразным искусственным интеллектом.
Промышленные роботы могут применяться практически повсеместно. Уровень автоматизации сегодня достиг таких высот, что они могут полностью заменить человека. При этом один робот способен заменить усилия нескольких и даже десятков специалистов. Робот не будет знать отдыха и покоя, ему не нужна зарплата и отчисления в многочисленные социальные фонды, ему не нужно спать и есть. Ему не знакомы человеческие ошибки, приводящие к браку или поломке дорогостоящего инструмента и оборудования. Именно поэтому сегодня многие производства стараются автоматизировать.
Промышленные роботы часто используют для:
- Контактной сварки.
- Плазменной резки.
- Покраски.
- Литья металлов.
- Нанесения лака.
- Дуговой сварки.
- Загрузочно-погрузочных работ.
- Бесконтактной обработки.
- Транспортирования изделий.
- Обработки резанием.
- Упаковки.
- Фрезерных операций.
- Раскроя материалов.
- Контрольно-измерительных операций.
- Обработки крупногабаритных деталей.
- Раскладки уложенной продукции.
- Изготовления объемных конструкций и тому подобное.
- Если решили оснастить свое производство роботами, то нужно понимать для чего их покупаете. Одни типы роботов предназначены только для выполнения определенной технологической операции, другие – могут выполнять сразу несколько. В тоже время стоимость последних может быть на порядок выше, чем первых.
- Промышленные роботы – это технически сложные устройства, которые требуют грамотного программирования, настройки и обслуживания. Поэтому важно обращаться за покупкой в компанию, которая сможет не только продать, но и обеспечить полноценное его обслуживание.
- Если не хотите думать, как вклинить промышленного робота в технологическую операцию, как его подключить и использовать, то стоит покупать робота с услугой под ключ. Специалисты продающей компании сами подберут робота под Ваши требования, привезут, установят, наладят технологический процесс, проведут обучение и обеспечат его обслуживание.
Похожие темы:
Промышленный робот — разновидности и их внедрение на производство
Чтобы заменить человека на производстве, нужна его усовершенствованная копия – к такому выводу пришли инженеры, впервые создавшие робототехнику. Однажды это открытие стало настоящим техническим прорывом, а сегодня используется предприятиями едва ли не во всех отраслях производства.
Промышленный манипулятор – это тип робота, который по внешнему исполнению, функционалу подобен человеческой руке. Он может работать как самостоятельное устройство или являться составным элементом роботизированного комплекса. Он управляется дистанционно, сводя к минимуму вовлеченность специалистов в физически сложную, монотонную механическую работу.
ДС-РОБОТИКС предлагает широкий выбор производственных роботов манипуляторов? с которым можно ознакомиться в каталоге.
Устройство робота-манипулятораРоботизированная рука управляется при помощи программного обеспечения. Конструкция не подразумевает наличия гидравлики или пневматики – все процессы построены на электромеханике.
В структуру входит ряд компонентов.
- Рабочий орган – устройство, выполняющее технологические операции, воздействующее на объект манипулирования. Это инструмент (фреза, сварочная головка, лазерный сканер) или захватное устройство.
- Опорные конструкции – элементы, обеспечивающие прочность, жесткость фиксации. В зависимости от специфики робота, несущие конструкции могут представлять собой стойки, колонны или другие решения.
- Манипуляционная система – это сложный механизм с разомкнутой кинематической цепью, состоящий из большого количества звеньев. Служит для пространственной ориентации рабочего органа, его переноса к точке работы.
- Привод – компонент, который преобразует энергию в механическое движение. Действует согласно параметрам, заданным при помощи программного обеспечения. Привод, в свою очередь, состоит из энергоустановки, двигателей, передаточных механизмов.
- Система программного управления – это «ядро» автоматизированного помощника, позволяющее машине самостоятельно выполнять задачи без непосредственного участия человека. При помощи программирования оператор формирует управляющие сигналы, которые запускают выполнение операций.
Система состоит из следующих элементов:
- пульта управления;
- запоминающего устройства; вычислительного устройства;
- блоков управления приводами манипулятора;
- технологического оборудования.
Разновидности роботов-манипуляторов
Классифицируют их по широкому диапазону признаков. Приведем основные из них.
- По количеству осей:
- 4-осевые – применяются для фасовки и укладки продукции;
- 6-осевые – используются для прочих операций.
2. По степени подвижности: от 2 до 6 уровня. Чем выше параметр, тем более точно робот-манипулятор производит наклоны, сжатие, вращение – другими словами, имитирует движение человеческой руки.
3. По типу операций:
- универсальные – выполняют основные, а также вспомогательные задачи, робота можно быстро переориентировать на новый вид работы;
- подъемно-транспортные – перемещают объекты в пространстве;
- производственные – выполняют конкретные технологические задачи: покраску, сварку, резку, сортировку, сверление, гибку.
- По грузоподъемности:
- легкие – до 10 кг;
- средней грузоподъемности – до 200 кг;
- тяжелые – до 1 тонны;
- сверхтяжелые – более 1 тонны.
Автоматизированные устройства помогают повысить эффективность предприятий в различных сферах: металлургии, автомобилестроении, химической, пищевой, легкой промышленности – это далеко не все направления.
На мировом рынке существует большой выбор роботизированных комплексов. Новые технологии становятся все более доступными также для малого и среднего бизнеса. Приобретение промышленного манипулятора – это не расход, а инвестиция! Сферы применения в производстве разнообразны.
Почему стоит купить робота-манипулятора
Внедрение роботизированного манипулятора позволяет тысячам предприятий решать несколько важнейших задач:
- увеличивать объем выпуска продукции;
- повышать качество выпускаемых изделий, продуктов;
- сокращать производственный цикл за счет способности работать круглосуточно;
- освобождать сотрудников от выполнения физически обременительных и опасных для здоровья операций;
- автоматизировать монотонную работу.
ДС-РОБОТИКС уже много лет сотрудничает с лучшими компаниями, которые занимаются проектированием – это европейские производители KUKA, ABB. Купить манипулятор, подходящий для производства — легко, оставьте заявку, и мы свяжемся с вами.
Современные роботокомплексы, с одной стороны, представляют собой сложные высокотехнологичные системы, а с другой, они просты в эксплуатации. Не нужно быть программистом, чтобы научиться ставить перед машиной производственные задачи. Более того, многие управляются голосом! Всю самую сложную работу берем на себя: наши инженеры полностью подготовят машины к использованию, так что вашим сотрудникам останется задавать простые алгоритмы и контролировать качество работы.
Каждый клиент задается вопросом сколько стоит промышленный робот с установкой и обучением сотрудников, ответить сразу на этот вопрос невозможно. Необходимо учесть, что цена уникальна для каждого производства. Просто сообщите ДС-РОБОТИКС, какое оборудование вам необходимо, и мы подскажем выгодное решение. Наши специалисты сопровождают каждый проект от поступления заявки до внедрения оборудования в работу производственного комплекса. Мы научим ваших сотрудников работать с новой техникой и обеспечим сервисное обслуживание.
Уникальный робот-манипулятор от «Атомэнергоремонта» поможет ремонтировать парогенераторы АЭС
Цех опытно-конструкторских работ «АСК» «Уралатомэнергоремонта» (особое подразделение филиала АО «Атомэнергоремонт», специализирующееся на изготовлении роботизированных систем) создал уникального робота-манипулятора для глушения дефектных труб парогенераторов. Он уже прошел испытания в присутствии представителей АО «Концерн Росэнергоатом» и АО ОКБ «Гидропресс», которые подтвердили, что робот соответствует требованиям технического задания и может быть применен при ремонтах АЭС уже этим летом.
Робот-манипулятор АСК 565.00, на создание которого ушло два года работ, глушит трубы по результатам автоматизированного вихретокового контроля труб, полученного роботом АСК 183. За час устройство может обработать до 40 заглушек, при средних затратах времени на одну трубку в 2 минуты. Робот обладает высокой точностью наводки – до 0,1 мм. Кроме того, манипулятор «Атомэнергоремонта» в своей программе видит сразу всю сетку трубок внутри парогенератора, а не отдельные сектора, так что не требует дополнительной переустановки.
Еще одно достоинство робота — небольшие размеры: его можно перенести в двух чемоданах. На месте проведения работ три специалиста занимаются его установкой в парогенератор, а далее оператор удаленно взаимодействует с ним при помощи пульта управления.
Манипулятор готов для работы на атомных электростанциях российского типа с реакторами ВВЭР-1200 и ВВЭР-1000. В перспективе будет разработана программа и усовершенствована конструкция для работы с реакторами типа ВВЭР-ТОИ. «На сегодня манипулятор возможно эксплуатировать на строящихся и действующих АЭС, если при выполнении контроля будут выявлены дефекты. Сейчас мы работаем над получением патента, и хотим в дальнейшем продвинуть технологию за рамки атомной отрасли. Например, в нефтехимию — для работы с оборудованием теплообменников», — поделился Максим Горбов, начальник цеха опытно-конструкторских работ «АСК» «Уралатомэнергоремонт».
Для справки:
В процессе работы парогенератора теплообменные трубки, толщина стенки которых составляет 1,5 мм, находятся в экстремальных условиях работы под давлением – 160 атмосфер и температуре 300 градусов Цельсия. Вследствие этого, на трубках могут образовываться дефекты. Если теплообменные трубки парогенератора имеют недопустимый дефект, они требуют глушения. Глушение – это процесс, в ходе которого специалисты по ремонту вставляют пробку в неисправную трубку и затем приваривают ее, чтобы блокировать выход воды. Раньше для глушения труб специалисты ремонтной компании самостоятельно залезали внутрь парогенератора и вручную выполняли сварку.
Суставная часть: разработана механическая рука для людей с ограниченными возможностями | Статьи
Новый робот-манипулятор, созданный в МФТИ, поможет людям с ограниченными возможностями. Он представляет собой механическую руку с семью суставами и кистью, которая способна брать предметы, налить лекарство, напоить и накормить человека. В перспективе такие установки могут пригодиться и на производстве — там, где работникам буквально нужна «третья рука». Управляется уникальный робот взглядом. Изобретение российских ученых появится на рынке в ближайшие три года.
В Московском физико-техническом институте (МФТИ) сконструировали уникальную роботическую систему, предназначенную для помощи маломобильным людям. Уже создан прототип устройства, состоящий из робота-манипулятора, специального захвата и системы технического зрения, рассказал «Известиям» руководитель лаборатории волновых процессов и систем управления МФТИ Роман Горбачев.
— Комплекс будет предназначен для людей, у которых нарушена функция рук в результате травм или болезни, — говорит он. — Робот должен дать возможность человеку переместить предметы, открыть бутылку, подать яблоко. Манипулятор сможет его напоить и накормить, помочь принять лекарство.
Роботизированная стойка снабжена для маневренности семью суставами, которые выполняют наклоны и вращаются вокруг своей оси. Управление машиной не потребует от человека никаких двигательных усилий — достаточно будет лишь посмотреть на нужный объект.
— Робот сам распознает, на какой объект направлен взгляд, чтобы выполнить ту или иную операцию. Поступившая от пользователя команда фиксируется айтрекером и передается в систему управления, — пояснил Роман Горбачев. — В самом роботе есть также устройства для реализации технического зрения, с помощью которых он также видит, что нужно взять или переместить.
Система зрения формирует образ нужного предмета в виде стереопары, то есть пары плоских изображений одного и того же объекта или сюжета, у которых есть различия между изображениями. Они призваны создать эффект объема. Затем система управления фиксирует пространственные координаты того, что нужно подать или переместить, и передает команду манипулятору. По этим данным робот рассчитывает, на сколько градусов и под каким углом нужно повернуть тот или иной сустав манипулятора, чтобы эффективно совершить захват объекта.
Фото: пресс-служба МФТИ
Робот-помощник может быть установлен у кровати больного или же на инвалидную коляску. Его можно будет использовать не только дома, но и за его пределами — к примеру, сейчас ученые настраивают аппаратуру для того, чтобы обучить машину брать те или иные продукты с полок магазина.
Предполагается, что в дальнейшем манипулятор сможет управляться не только через айтрекер, но и голосом и даже силой мысли. Специально для этого в МФТИ разрабатывается инновационная нейрогарнитура.
— Это такая шапочка с контактами, на которой размещено шесть электродов. Они фиксируют намерения человека. Наши программисты разработали специальные алгоритмы, которые позволяют устройству распознавать команды. Пользователю нужно будет только послать мысленный сигнал, например «хочу», — пояснил ведущий инженер лаборатории волновых процессов и систем управления МФТИ Михаил Зарипов.
Сама разработка и применяемая технология взаимодействия «мозг–механизм» крайне интересна и находится на передовом крае науки, уверен директор научно-исследовательского центра спортивной науки ЮУрГУ Виталий Епишев. Но использовать ее нужно «с умом».
— Зачастую человек не может сидеть, ходить, двигать рукой или ногой не потому, что не может, а потому, что забыл как. Именно для этого необходима двигательная реабилитация, которая зачастую бывает агрессивной, — человека специально заставляют двигаться, для того чтобы поесть, сходить в туалет, — уверен он. — Следовательно, нельзя рассчитывать, что применение данной технологии резко повысит число «восстановившихся», скорее будет наоборот. Этот робот необходим для тех пациентов, которые уже не могут восстановиться.
Ученые предполагают, что такие установки также могут пригодиться и на производстве — там, где работникам буквально нужна «третья рука»: взять телефон, подать инструмент, что-то подержать. По прогнозам разработчиков, робот-сиделка появится на рынке в ближайшие три года.
ЧИТАЙТЕ ТАКЖЕ
границ | Reachy, напечатанная на 3D-принтере роботизированная рука, похожая на человека, в качестве испытательного стенда для стратегий управления человеком и роботом
1. Введение
В то время как роботизированные системы продолжают улучшаться с точки зрения двигательных способностей благодаря прогрессу в мехатронике, разработка стратегий управления и интерфейсов, позволяющих человеку использовать весь потенциал усовершенствованной роботизированной руки, оказывается ключевой задачей в области робототехники гуманоидов и, в частности, , реабилитационная техника. Действительно, опросы и обзоры пользователей (Biddiss and Chau, 2007; Cordella et al., 2016) уже показали, что основными причинами отказа от протезирования верхних конечностей были недостаточная функциональность и необходимость длительного и сложного обучения. В качестве примеров взяты из некоторых из самых передовых устройств, представленных в настоящее время на рынке протезов, руки Michelangelo (Ottobock) и i-limb Quantum (Touch Bionics) включают слишком много исполнительных механизмов, чтобы человек с ампутированной конечностью мог управлять ими независимо, и их управление во многом зависит от предварительной подготовки. -программируемые схемы захвата. Даже в случае здорового человека разрыв между сложностью роботизированных устройств и доступными командными сигналами подчеркивает необходимость эффективных и удобных интерфейсов и стратегий управления.
Чтобы восполнить этот пробел, исследователи исследовали методы получения дополнительных входных данных от человека. Одним из таких решений является метод объединения датчиков, который предполагает объединение измерений от нескольких датчиков, работающих одновременно. Этот подход может использоваться с различными устройствами и модальностями зондирования (Novak and Riener, 2015), будь то визуальные, кинематические или физиологические. В частности, поскольку распознавание объектов из эгоцентрических видеороликов может помочь улавливанию действий при нейропротезах (de San Roman et al., 2017), в недавних работах исследовалось, как роботизированной системой можно управлять путем объединения отслеживания взгляда с ЭМГ (Corbett et al., 2013, 2014; Markovic et al., 2015; Gigli et al., 2017) или электроэнцефалографии (ЭЭГ). сигналов (McMullen et al., 2014; Wang et al., 2015). В других работах также исследовалось, как можно использовать дополненную реальность (AR) для обеспечения соответствующей визуальной обратной связи о состоянии роботизированной руки (Markovic et al., 2014, 2017) с целью улучшения контура управления.
Другой подход к преодолению этого ограничения — снизить потребность в командных сигналах, заставив роботизированную систему взять на себя часть своей собственной сложности.Таким образом, разрабатываются методы, позволяющие человеку управлять роботом с помощью высокоуровневых команд, относящихся к задаче, вместо того, чтобы управлять роботом непосредственно в пространстве исполнительных механизмов. Распространенной реализацией этого подхода является выполнение управления конечной точкой через обратную кинематику (IK), которая преобразует командные сигналы из трехмерного рабочего пространства в пространство исполнительного механизма. Решение IK — ключевая тема исследований во всей области робототехники, включая автономную гуманоидную робототехнику (Bae et al., 2015; Rakita et al., 2018), но также может использоваться для управления кинематической избыточностью роботов, управляемых человеком (Zucker et al., 2015; Rakita et al., 2017; Meeker et al., 2018).
Для оценки эффективности методов управления уже более десяти лет используется виртуальная реальность (VR) (Hauschild et al., 2007; Kaliki et al., 2013; Phelan et al., 2015; Blana et al., 2016). ). В последнее время этот подход также извлекает выгоду из растущей доступности на рынке наборов для разработки VR, например Oculus (Facebook Technologies, LLC) и VIVE (HTC Corporation), что упрощает для исследователей интеграцию виртуальной тестовой среды в их экспериментальную установку.Однако роботизированная система, смоделированная в виртуальной среде, не будет вести себя так же, как физическое устройство, по своей сути подверженное механическим ограничениям и недостаткам. В самом деле, VR-установки обычно реализуют упрощенное устройство (например, идеальные приводы без трения) в упрощенном контексте (например, игнорируя гравитацию). В результате выводы, сделанные на основе оценок, выполненных в виртуальной тестовой среде, могут быть неприменимы напрямую к реальному роботу.
С другой стороны, некоторые исследователи используют настоящие роботизированные руки, чтобы получить более реалистичные данные на этапе тестирования.В литературных работах используются как коммерчески доступные устройства (Rakita et al., 2017; Meeker et al., 2018), так и системы-прототипы (McMullen et al., 2014; Bae et al., 2015). В частности, в области протезирования многие устройства с несколькими степенями свободы были разработаны как экспериментальные прототипы, такие как рука UNB (Losier et al., 2011), рука Йеля (Belter and Dollar, 2013) и SmartHand ( Cipriani et al., 2011).
Среди таких исследовательских устройств были разработаны Dawson et al.(2014) и Krausz et al. (2016) были разработаны с целью быть недорогими и легкодоступными для других исследователей как системы с открытым исходным кодом, включая детали, напечатанные на 3D-принтере. Действительно, поскольку 3D-печать позволяет изготавливать сложные и нестандартные формы небольшими партиями с низкими затратами, этот производственный метод полезен при разработке продуктов на стадии прототипа. Кроме того, тот факт, что одни и те же детали могут быть изготовлены на многих различных 3D-принтерах, в значительной степени способствует совместному использованию этих конструкций.
В этой статье мы представляем Reachy, тестовую платформу в натуральную величину, которая будет использоваться исследователями для изучения, разработки и тестирования стратегий управления и интерфейсов для управляемой человеком робототехники. Опираясь на технические решения, взятые из аналогичных работ, мы стремились разработать робота, который был бы доступным на , доступным для совместного использования и « взламываемым » по сравнению с высококлассными прототипами или коммерчески доступными роботизированными манипуляторами; но также более человекоподобных , чем роботов промышленного уровня. Действительно, Reachy выигрывает от близости к человеческой руке с точки зрения размера и формы, а также двигательных функций и строения суставов.Кроме того, несмотря на то, что варианты использования не ограничиваются этой областью, эта роботизированная платформа в первую очередь предназначена для применения в протезировании и реабилитационной инженерии.
2. Дизайн роботов
2.1. Принципы дизайна
Reachy был создан с целью предоставить исследователям роботизированную платформу для тестирования интерфейсов управления и стратегий, которые будут использоваться для управления роботизированной рукой. Чтобы робот стал актуальным инструментом в области реабилитационных технологий, в его конструкции делается упор на подобие человека.Действительно, Ричи предназначен для имитации поведения верхней конечности человека в натуральную величину, при этом он фиксируется на уровне плеч на неподвижной опоре.
Кроме того, еще одним важным требованием к конструкции Reachy было обеспечение того, чтобы робот был пригоден для множества применений, начиная от нейропротезов и заканчивая дистанционно управляемыми манипуляторами. Таким образом, чтобы Reachy была универсальной платформой, мы намеревались сделать ее широко настраиваемой, а также легко и широко подключаемой. Обеспечение обширной экспериментальной воспроизводимости в этом контексте требует, чтобы платформа позволяла проводить тщательные модификации оборудования, а также делиться упомянутыми модификациями в научном сообществе.Поэтому мы решили разработать дизайн Reachy на следующих принципах и технических решениях: напечатаны на 3D-принтере пластмассовых каркасных деталей; стандартные приводы , механические компоненты и электроника; бесплатно и с открытым исходным кодом, совместно использующие программных и аппаратных ресурсов.
Reachy был разработан создателями проекта Poppy (Lapeyre et al., 2014), семейства роботов для исследований, искусства и образования, которые полагаются на общую архитектуру программного и аппаратного обеспечения, но отображают различные формы, функции и цели. .В частности, первый робот этого семейства, Poppy Humanoid, изначально был разработан для исследования роли морфологии в двуногом передвижении (Lapeyre et al., 2013), что вызвало необходимость в платформе, части которой можно было бы легко перепроектировать, а затем произвести. собран. Вышеупомянутые принципы дизайна напрямую вытекают из философии и технических решений, которые лежали в основе разработки Poppy.
2.2. Оборудование
Reachy изначально разрабатывался как «полноразмерная» рука, то есть прототип, состоящий из трех сегментов верхней конечности человека от плеча до кисти.В этой «стандартной» версии Reachy весит 1,4 кг и имеет размеры 60 см от плеча до запястья, с размерами и пропорциями, аналогичными правой руке взрослого человека. Эти прототипы были оснащены и протестированы с различными конечными эффекторами (см. Рис. 1B): базовой сферой, антропоморфной рукой без суставов или зажимом с двумя зубцами, обеспечивающим минимальную захватывающую способность. Кроме того, поскольку робот предназначен для настройки и «взлома», пользователи Reachy могут адаптировать его дистальный конец к существующей роботизированной руке, выбранной среди доступных исследовательских прототипов (Losier et al., 2011; Белтер и Доллар, 2013; Krausz et al., 2016). Например, новый прототип с изображением руки Брунеля (OpenBionics) в качестве рабочего органа был разработан с целью расширения функций и возможностей робота.
Рисунок 1 . Reachy в стандартной версии. (A) Архитектурная схема, описывающая программный стек, от высокоуровневого программного интерфейса до двигателей. Пунктирными линиями обозначены оси вращения шарниров. (B) Доступные в настоящее время конечные эффекторы.Сверху вниз: сферический, конический, ручной и шарнирный зажим.
В стандартной версии робот состоит из семи независимых степеней свободы, каждая из которых приводится в действие отдельным двигателем. Первые три мотора управляют плечево-лопаточно-плечевым суставом упрощенным способом, выполняя три последовательных вращения: сгибание-разгибание плеча, отведение-приведение плеча и латерально-медиальное вращение плечевой кости. Оси вращения трех двигателей пересекаются в одной точке, расположенной в центре вала второго двигателя (см. Рисунок 1A).Узел заплечика также содержит два роликовых подшипника для облегчения работы первого и третьего степеней свободы. Чтобы робот оставался достаточно простым для моделирования и сборки, эта сборка не воспроизводит систему взаимозависимых вращений и перемещений, образующих суставно-лопаточно-плечевой комплекс, но все же допускает широкий диапазон движений. Четвертый и пятый двигатели приводят в действие соответственно сгибание-разгибание в локтевом суставе и пронацию-супинацию предплечья, причем последний установлен на шарикоподшипнике.Наконец, два последних двигателя управляют лучезапястным суставом, последовательно выполняя радиально-локтевое отклонение и сгибание-разгибание. Их соответствующие оси вращения ортогональны, но не пересекаются; вместо этого два двигателя связаны короткой деталью, соединяющей предплечье и рабочий орган. Этот интервал между осями вращения имеет некоторое сходство с интервалом, который разделяет оси суставов запястья человека, хотя он немного слишком велик из-за размера привода.
Мы решили использовать серводвигатели Robotis Dynamixel для приведения в действие семи степеней свободы Reachy.Эти двигатели представляют собой универсальные модули, обеспечивающие хороший компромисс между точностью, скоростью и надежностью с механической точки зрения, а также встроенные датчики, контролирующие угловую скорость и положение. Они также позволяют индивидуально настраивать внутренний пропорционально-интегрально-производный (ПИД) регулятор, максимальный крутящий момент и механическую податливость. Благодаря этим характеристикам серводвигатели Dynamixel обеспечивают высокий уровень модульности, в то же время обеспечивая богатое поведение двигателя. В этом отношении приводы этой серии обычно используются в области робототехники, включая роботов-гуманоидов (Ha et al., 2011; Ly et al., 2011; Hild et al., 2012; Schwarz et al., 2013; Dawson et al., 2014). Помимо приводов, для сборки шарниров Reachy необходимо всего несколько дополнительных механических компонентов, а именно: три вышеупомянутых подшипника и трансмиссионные колеса, которые нужно вставить на вал каждого серводвигателя. В частности, поскольку все эти приводы включают в себя индивидуальную коробку передач, сборка Reachy не требует дополнительных редукционных механизмов для совместного приведения в действие.
В стандартную версию Reachy входят три разные модели двигателей Dynamixel.Самый мощный из них — это MX-106, и он управляет самой проксимальной глубиной резкости робота, сгибанием-разгибанием плеча, в то время как оставшаяся глубина резкости плеча и локтевой сустав приводится в действие MX-64. Поскольку эти четыре шарнира выдерживают самые тяжелые нагрузки во время движения робота, соответствующие двигатели были выбраны соответственно. Суставы предплечья и запястья, которые не требуют такой большой мощности, приводятся в действие AX-18, который легче и меньше серводвигателей MX, так что распределение веса робота смещено в сторону проксимального конца.
Что касается скелета робота, то конструкция конечностей основана на решетчатой конструкции, что позволяет снизить вес и упростить сборку, обеспечивая легкий доступ к отверстиям для винтов. Эта открытая структура с низкой плотностью также улучшает теплоотвод двигателя благодаря более свободной циркуляции воздуха. Прототипы и текущие версии Reachy были напечатаны из полиамида или полимолочной кислоты (PLA), двух материалов, обычно используемых в индустрии аддитивного производства. Их низкая стоимость, доступность и совместимость с большинством настольных 3D-принтеров делают их идеальными для создания прототипов, а их долговечность и разрешение печати делают их подходящими для готовой продукции с высокими стандартами качества.
2.3. Электроника и программное обеспечение
ДвигателиReachy соединены друг с другом последовательно с помощью трехконтактных разъемов и питаются от пары блоков питания 12 В × 5 А общей мощностью 120 Вт. На одном конце серии адаптер USB позволяет для подключения к компьютеру. Затем робот управляется через последовательный порт с программным интерфейсом под названием Pypot, который обеспечивает связь с серводвигателями Dynamixel для управления роботом, например, отправка команд двигателя, получение данных со встроенных датчиков.Эта архитектура проиллюстрирована на рисунке 1A.
Разработанная в рамках проекта Poppy, эта программная база является общей для всего семейства роботов Poppy-Reachy на базе Dynamixel. Следуя подходу с открытым исходным кодом, Pypot был полностью написан на Python, чтобы обеспечить кроссплатформенное развертывание, поскольку этот язык совместим с большинством настольных операционных систем, а также с некоторыми встроенными системами для одноплатных компьютеров. Программирование на Python также обеспечивает быструю разработку, уделяя особое внимание удобочитаемости и лаконичности кода, чтобы разработчики могли эффективно создавать четкие программы, независимо от того, является ли их проект малым или большим.Кроме того, пользователи Reachy могут воспользоваться многочисленными библиотеками Python, предназначенными для научных вычислений и уже используемыми в научном сообществе. Это позволяет им сочетать функции Reachy с такими методами, как обработка сигналов или машинное обучение, без необходимости прибегать к другим языкам или программному обеспечению.
Хотя его природа с открытым исходным кодом предоставляет опытным программистам широкую свободу в работе с системой, Pypot также предназначен для доступа новичков. В частности, он обеспечивает высокоуровневые моторные команды над угловым положением суставов и механической податливостью, так что любой пользователь может запрограммировать траекторию и привести робота в движение с помощью всего нескольких строк кода (см. Дополнительный материал).Кроме того, пользователям Reachy предоставляются учебные пособия в виде записных книжек Jupyter (Kluyver et al., 2016), которые представляют собой интерактивную разработку, поддерживающую объединение исходного кода, форматированного текста, графиков и графических виджетов ввода / вывода. Блокноты Jupyter могут быть созданы с помощью веб-навигатора и не требуют специального редактора кода. В результате эта программная среда достаточно доступна, чтобы позволить использовать роботов Poppy в качестве образовательных платформ в нескольких средних и старших школах.
Pypot также включает функции для управления виртуальным роботом в симуляторе V-REP (Freese, 2015), как показано на рисунке 2.Таким образом, пользователи могут экспериментировать и проверять свои разработки на смоделированном Reachy перед их развертыванием на реальном роботе в физической установке. Переход от моделируемого робота к реальному и наоборот не требует каких-либо изменений исходного кода, кроме одного ключевого слова при настройке соединения с роботом.
Рисунок 2 . Настоящий робот Reachy (A) и его смоделированный аналог (B) , сидящие в той же позе.
2.4. Характеристики
2.4.1. Характеристики двигателя
ДвигателиReachy могут поддерживать до 10 минут непрерывной работы и могут работать в течение целого дня при выполнении коротких, разряженных движений, чередующихся с короткими периодами отдыха. Они обеспечивают полезную нагрузку около 500 г на уровне конечной точки, с которой робот может справиться в течение нескольких минут. Их встроенные датчики нагрузки и температуры также позволяют автоматически запускать фазы покоя, чтобы предотвратить перегрев во время длительной работы или после того, как робот подвергается значительной нагрузке.В результате Reachy можно запрограммировать на автономную работу в течение продолжительных периодов времени, не подвергая приводы риску.
Без заряда двигатели Dynamixel могут развивать максимальную скорость 500 ° / с и максимальное ускорение 10 000 ° / с. 2 . Когда они работают в своем номинальном диапазоне угловых скоростей, их характеристики позволяют суставу робота достигать целевого положения с задержкой от 50 до 100 мс. Такая отзывчивость, таким образом, позволяет разрабатывать схемы управления в реальном времени, в которых человек постоянно управляет роботом.Как следствие, робот может безопасно перемещать свою конечную точку со скоростью до 2 м / с с ускорением 10 м / с 2 .
Благодаря трем степеням свободы на уровне плеч, полноразмерная версия Reachy может выполнять сложные движения и позы в широком диапазоне действий в трехмерном пространстве. В результате Reachy имеет рабочее пространство, аналогичное рабочему пространству руки взрослого человека, в пределах сферы радиусом 65 см с центром на его плече.
2.4.2. Применение в протезировании
Благодаря своей форме и суставам, напоминающим человеческий, Reachy подходит для применения в области инженерии реабилитации верхних конечностей в качестве испытательной платформы в натуральную величину.Действительно, Reachy может имитировать поведение протеза руки, чтобы протестировать и проверить схемы управления, прежде чем применять их на настоящем протезе. В этом контексте он также выигрывает в том, что он значительно дешевле, чем большинство имеющихся в продаже протезов верхних конечностей, благодаря своей аппаратной архитектуре.
Действительно, технология 3D-печати уже использовалась для создания многочисленных прототипов протезов руки, конструкции которых разрабатываются разработчиками, начиная от энтузиастов и любителей DIY до исследователей и инженеров, как подробно описано в статье 10 Kate et al.(2017). Тот факт, что более половины проектов этих устройств, напечатанных на 3D-принтере, размещены в Интернете и доступны бесплатно, показывает, как эти создатели используют преимущества взаимодействия большинства настольных принтеров. В этом обзоре также подчеркивается, что стоимость производства этих устройств является одним из решающих аспектов, вызвавших рост этой категории протезных устройств, настолько, что некоторые напечатанные на 3D-принтере протезы недавно вышли из стадии прототипа и вышли на рынок. такие как Hero Arm (OpenBionics).
По сравнению с устройствами, перечисленными в этом обзоре, Reachy является одной из немногих моделей, предназначенных для решения проблемы ампутации выше локтя. Кроме того, несмотря на то, что преобладание трансрадиальных ампутаций среди нарушений верхних конечностей объясняет редкость этого типа протезов, Reachy предназначен для проведения исследований на нескольких уровнях ампутации. Действительно, робот может использоваться в качестве макета устройства для любого уровня ампутации верхней конечности при обучении пациента мышечной активности перед установкой миоэлектрического протеза.Это позволяет пациенту начать тренировку еще до того, как он сможет носить протез, например, когда культя все еще зарубается. Очевидно, что такая тренировка не может заменить опыт работы с реальным протезом, особенно из-за различий с точки зрения точки зрения, воплощения и восприятия веса и инерции. Тем не менее, это может происходить при реабилитации пациента в качестве дополнительной или предварительной тренировки с целью ознакомления с миоэлектрическим контролем, а также с реактивностью и точностью двигателей.
В этом контексте потерянные двигательные функции пациента эмулируются соответствующими суставами Ричи, в то время как более проксимальные приводы робота фиксируются в заданной позе. Таким образом, пациент может практиковаться в выполнении соответствующих мышечных сокращений и получать соответствующую обратную связь от робота, который движется соответствующим образом, следуя заданной схеме управления протезом. В более продвинутой установке эти двигатели могут даже отслеживать и воспроизводить остаточные движения конечностей пациента, а не блокировать их.Такая установка может оказаться полезной также для тестирования стратегий управления с использованием остаточного движения конечности в качестве входного сигнала для управления протезом (Kaliki et al., 2013; Merad et al., 2016).
Что касается конечного эффектора в отношении захвата протезом руки, фиксированное запястье часто требует от пациента выполнения дополнительных движений плечом и локтем, чтобы компенсировать недостаточную подвижность дистального отдела. Таким образом, включение движения запястья оказывается весьма полезным для пациента (Kanitz et al., 2018), поскольку оно обеспечивает более естественное и удобное использование.Таким образом, запястье Reachy с 2 степенями свободы делает его подходящим для решения этого аспекта управления протезом. В сочетании с вращением предплечья эти двигательные функции на уровне запястья позволяют роботу устанавливать свою конечную точку в самых разных трехмерных ориентациях, обеспечивая различные типы захвата в зависимости от интересующего предмета.
Наконец, настраиваемая архитектура Reachy позволяет пользователям проектировать, печатать и собирать индивидуальные крепления, так что часть робота может быть установлена на настоящем протезном гнезде или ремне безопасности и носить ее с ампутированными конечностями (см. Рисунок 3).Будь то трансрадиальный или трансгумеральный уровень, части скелета робота могут быть изменены таким образом, чтобы его размеры соответствовали морфологии пользователя, чтобы лучше соответствовать анатомии культи, а также пропорциям здоровой конечности. Очевидно, что Reachy не предназначен для замены протеза для повседневного использования, но версия Reachy, устанавливаемая на розетку, также может быть использована для обучения пациентов с миоэлектрическим контролем.
Рисунок 3 . Виртуальная иллюстрация возможной эволюции Reachy: версия с креплением на розетку, которую носит чрез плечевой человек с ампутированной конечностью.
2,5. Сравнение с существующими роботизированными манипуляторами
Чтобы сравнить характеристики и возможности Reachy с существующими роботизированными устройствами, мы сравнили его с несколькими родственными роботизированными манипуляторами, рассматривая различные аспекты и особенности.
Рука Бенто (Доусон и др., 2014) — роботизированная рука, используемая в исследованиях и реабилитации верхних конечностей для имитации миоэлектрического протеза. Он включает пять суставов от плечевой кости до конечного эффектора, каждый из которых приводится в действие двигателем Dynamixel.Его механическая структура повторяет человеческие формы и пропорции и в основном основана на пластиковых деталях, напечатанных на 3D-принтере. В этом смысле этот робот очень похож на Ричи, хотя верхняя часть руки включает только одну глубину резкости на уровне плечевой кости и ни одной степени свободы на уровне плеча. Как следствие, его рабочее пространство ограничено круглой областью шириной 22 см с центром на изгибе, что обеспечивает грузоподъемность всего 300 г. Этот узкий диапазон движений и ограниченное срабатывание плеча делают Bento Arm непригодным для исследования движений всей руки, если он не установлен на гнезде протеза.В качестве реабилитационного устройства он нацелен на имитацию трансрадиального протеза, но, по-видимому, не подходит для более высоких уровней ампутации. В частности, его нельзя использовать для изучения или воспроизведения координации между суставами плеча.
GummiArm (Stoelen et al., 2016) — экспериментальная роботизированная рука, созданная на основе биологических материалов, состоящая из 10 суставов, приводимых в движение сухожилиями и приводимых в действие 19 двигателями Dynamixel. Благодаря восьми суставам, обеспечивающим переменную жесткость, этот робот может выполнять движения в рабочем пространстве, аналогичном движению руки человека, при этом физически взаимодействовать с ним безопасно.Подобно Reachy, его части скелета, напечатанные на 3D-принтере, и подход с открытым исходным кодом позволяют пользователям реплицировать и изменять. Тем не менее, большее количество приводов и механика на основе сухожилий делают его более дорогим (более 5000 долларов в запасных частях, более 11500 долларов в комплекте), а также более подходящим для исследований биоиндуцированного срабатывания и совместимого управления двигателем, чем для реабилитации. инженерное дело. Действительно, большинство протезов плеча, локтя и предплечья приводятся в действие одним двигателем на сустав, что не соответствует требованиям, вместо имитации биомеханических структур человека.
Модульный протез конечности (MPL) (Johannes et al., 2011) — экспериментальный роботизированный протез верхней конечности, состоящий из 26 суставов, приводимых в действие 17 двигателями. Его высококачественные компоненты и антропоморфный дизайн позволяют ему достигать человеческой силы в широком диапазоне движений, предлагаемых его суставами. По сравнению с Reachy, этот робот предлагает гораздо лучшие моторные характеристики, такие как грузоподъемность 15 кг и общая скорость 120 ° / с. Однако эти возможности также имеют более высокое энергопотребление (24 vs.5 В для Reachy) и больший вес (4,7 против 1,2 кг для Reachy).
DLR Hand Arm System (Grebenstein et al., 2011) — это экспериментальная роботизированная рука, созданная на основе биологических материалов, теперь интегрированная в гуманоидного робота Дэвида в качестве его верхней конечности. Он включает в себя шесть степеней свободы в руке и 19 в руке, приводимых в действие в общей сложности 52 двигателями. Его механическая структура с приводом от сухожилий позволяет роботу ловко работать со скоростью и в рабочем пространстве, сопоставимом с человеческим, что делает его явно более способным, чем Reachy, с точки зрения двигательных характеристик.Однако его двунаправленные соединения-антагонисты требуют множества двигателей и механических компонентов, специальной архитектуры передачи и плотной электронной сети, управляющей как срабатыванием, так и считыванием.
Из-за их цены и сложности с точки зрения электроники и механики эти передовые роботизированные устройства намного сложнее воспроизвести или детально настроить. В этом смысле их пользователи в значительной степени зависят от конструкторов и производителей роботов, которые собирают, модифицируют и ремонтируют его, тогда как дизайн Reachy позволяет пользователям обрабатывать каждый этап процесса изготовления.Его архитектура достаточно проста, чтобы позволить неспециалистам построить его и подключить к компьютеру. Что касается управления и взаимодействия, оба этих робота полагаются на сложные архитектуры управления (Bridges et al., 2011; Grebenstein et al., 2011), работающие в Simulink, проприетарном программном обеспечении, принадлежащем MathWorks, Inc. эти устройства менее открыты, и пользователю труднее модифицировать или адаптироваться к конкретному варианту использования. И наоборот, Reachy извлекает выгоду из своей программной архитектуры с открытым исходным кодом, предоставляющей множество вариантов взаимодействия с различными командными сигналами и внешними программными инструментами.
Хотя Reachy не сравнится с этими продвинутыми роботами с точки зрения производительности, его возможность подключения и легко модифицируемая структура делают его подходящей платформой для исследований. В этом смысле мы хотим продвигать Reachy как законченную платформу, сочетающую в себе характеристики аппаратного и программного обеспечения, способствующие репликации, настройке и универсальности. Нам неизвестна подобная роботизированная система, которая предлагала бы столько возможностей, исходя из сравнения, подробно описанного в этом разделе.
2.6. Обмен философией
Reachy разработан в партнерстве с Pollen Robotics и распространяется как проект с полностью открытым исходным кодом. Кроме того, пользователи, желающие собрать робота самостоятельно, могут купить все оборудование в запасных частях по общей цене ниже 4000 долларов за стандартную версию. Любая лаборатория может создать свой собственный Reachy, модифицировать его компоненты и настроить его по своему желанию как с аппаратной, так и с программной стороны. Это позволяет исследователям адаптировать робота к своим конкретным потребностям и связывать его со своими собственными устройствами и инструментами.
Исходные файлы моделей автоматизированного проектирования (САПР) различных печатаемых частей совместно используются по лицензии Creative Commons BY-SA и доступны в Интернете. Список материалов и программных компонентов, относящихся к Reachy, распространяется на условиях Стандартной общественной лицензии ограниченного применения GNU и доступен онлайн в репозитории проекта. Библиотека Pypot распространяется под Стандартной общественной лицензией GNU и доступна онлайн в специальном репозитории.
Поскольку Reachy использует ту же программную и аппаратную архитектуру, что и роботы Poppy, стоит отметить, что его пользователи могут извлечь выгоду из помощи и вклада сообщества проекта Poppy в его репозиторий.Действительно, этот центр сообщества дает доступ ко многим советам, касающимся различных аспектов робота, от настройки и сборки серводвигателей до настройки программных инструментов и устранения неполадок.
3. Подтверждения концепции
Чтобы проиллюстрировать возможности взаимодействия Reachy, мы разработали несколько доказательств концепции, в которых функции робота объединяются или расширяются с помощью различных внешних устройств и программных инструментов. Все доказательства концепции, описанные ниже, были разработаны на Python, чтобы дополнительно продемонстрировать интерфейсный потенциал, предоставляемый этим языком.
3.1. Обратная кинематика для управления положением конечной точки
Определение набора углов двигателя, которые помещают конечную точку робота в целевую позицию в его рабочем пространстве, является распространенной проблемой в области роботизированных манипуляторов и обычно называется проблемой Inverse Kinematics (IK). Поскольку он состоит из семи независимых степеней свободы, Reachy обычно отображает кинематическую избыточность , подразумевая, что существует бесконечное количество различных решений этой проблемы для каждой достижимой целевой позиции.Таким образом, чтобы привести положение конечной точки робота к заданной цели, необходимо определить, какой набор углов применять среди бесконечного количества возможных наборов. Однако численное выражение этой геометрической задачи с недостаточными ограничениями является нелинейным, что делает аналитическое решение непрактичным и дорогостоящим с точки зрения вычислений.
3.1.1. Локальная оптимизация
Вместо этого широко распространенным методом, используемым робототехниками для решения проблем IK, является использование локальной оптимизации. Этот метод основан на функции стоимости, приписывающей скалярное значение любому набору углов для количественной оценки того, насколько это хорошее решение по отношению к проблеме IK: более низкая стоимость означает лучшее решение.Обычно эта функция стоимости основана на расстоянии между целью и положением конечной точки, которое может быть определено аналитически с помощью геометрической модели робота. Затем, посредством пошагового процесса, оптимизация находит и возвращает локальный минимум этой функции стоимости, который должен соответствовать одному из наборов углов, помещающих конечную точку в требуемое положение.
Мы использовали библиотеку Python IKPy (Manceron, 2015), универсальный решатель IK, чтобы применить этот метод в Reachy.Ресурсы программного обеспечения робота включают файл универсального формата описания робота (URDF), описывающий механические свойства Reachy, такие как относительное положение и ориентация каждого сустава и части скелета. Затем эти геометрические данные могут быть импортированы с помощью IKPy для построения соответствующей кинематической цепочки путем прохождения последовательности соединений от основания робота до его конечной точки. Таким образом, это взаимодействие между IKPy и программным интерфейсом Reachy может быть выполнено прямо из коробки и работает как автономно, без каких-либо внешних устройств или специального оборудования.В результате объединение функций IKPy с параметрами команд двигателей обеспечивает новый и простой способ управления Reachy, отправляя трехмерные координаты в виде команд вместо углов сочленения. Пример кода, показывающий, как использовать IKPy с Reachy, доступен в Интернете.
IKPy позволяет задавать параметры процесса оптимизации (например, максимальное количество итераций, допуск сходимости) при его вызове из другой программы. Благодаря этим параметрам, доступным в коде, пользователи могут точно настроить процесс в соответствии с предполагаемым вариантом использования и доступной вычислительной мощностью.Например, после точной настройки нашей установки методом проб и ошибок модель смогла достичь субсантиметровой точности при времени вычисления менее 100 мс на настольном компьютере. Однако кинематическая цепь, используемая в этом методе, представляет собой теоретическую модель робота и не учитывает вес робота и механический люфт суставов. На физическом роботе, поскольку фактические двигатели не могут достичь точных угловых положений , определенных IKPy, конечная точка имеет тенденцию к недолету при использовании этого метода.Чтобы оценить точность конечной точки, расстояние между фактическим положением конечной точки и ее целью было измерено для восьмидесяти положений, распределенных в диапазоне действия робота; каждое измерение выполнялось после того, как робот двигался в течение 1,5 с, затем его просили удерживать позу в течение 3,5 с. Мы получили среднее расстояние до цели 87 мм (стандартное отклонение 23 мм), а также заметили, что конечная точка обычно достигает положений, расположенных под целью. Действительно, ошибки позиционирования по двум декартовым горизонтальным осям примерно центрированы на нуле (среднее значение <5 мм), тогда как по вертикальной оси эта ошибка подвержена заметному смещению (среднее значение = 84 мм).
Тем не менее, этот недостаток не будет явно заметен, если никакой видимый объект не материализует целевую позицию в рабочем пространстве. Кроме того, вертикальное смещение оказывается довольно постоянным во времени и в доступном пространстве. Следовательно, в контексте непрерывного управления положением конечной точки с этим можно иметь дело во время фазы калибровки, выполняемой перед фазой управления. Таким образом, этот интерфейс между IKPy и Reachy может быть удобно использован в приложениях, где нет большой потребности в точности конечных точек в рабочем пространстве.
Для оценки повторяемости роботу было поручено несколько раз выполнить одно и то же движение, в то время как положение конечной точки регистрировалось с помощью системы отслеживания движения (Optitrack V120 Trio, Natural Point Inc.). Во-первых, роботу была поставлена задача пройти во фронтальной плоскости круг шириной 40 см за 3,5 с. Сравнение записанных траекторий показало, что на ключевых кадрах, распределенных вдоль движения, для данного набора двигательных целей результирующие положения конечных точек робота были распределены в пределах сферы радиусом 12 мм.Затем роботу было поручено достичь заданного положения и удерживать его в течение нескольких секунд, прежде чем его конечная точка будет записана. После десяти повторений этого движения позиции были распределены внутри сферы радиусом 5 мм. Эти результаты иллюстрируют способность Ричи достигать одной и той же точки в пространстве в ответ на одни и те же моторные команды как в статическом, так и в динамическом контексте.
3.1.2. Обучение с учителем с помощью искусственной нейронной сети
С другой стороны, этот разрыв между теоретической моделью и фактическим функционированием Ричи можно уменьшить, используя методы моделирования, которые не предназначены для имитации идеального поведения робота .Один из них состоит в записи фактических движений, выполняемых роботом, и использовании их в качестве «реальных» примеров для выполнения контролируемого обучения. Цель состоит в том, чтобы создать набор движений, в котором синхронно записываются как углы двигателя, так и координаты конечной точки, чтобы алгоритм обучения с учителем мог имитировать фактическую взаимосвязь между этими двумя величинами.
Чтобы применить эту технику с Reachy, мы сначала определили набор положений робота посредством физической демонстрации: с его двигателями, установленными в соответствии с требованиями, робот был вручную помещен в различные конфигурации, в то время как встроенные датчики регистрировали углы суставов.Затем, на основе записанных углов, робот выполнял движения, переходя от одного из таких продемонстрированных положений к другому, в то время как Optitrack V120 записывал фактическое положение конечной точки. Мы использовали искусственную нейронную сеть (ИНС) для выполнения контролируемого обучения на захваченных данных соединения и конечных точек. ИНС — это вычислительные инструменты, основанные на элементарных логических единицах, называемых «нейронами», которые связаны между собой взвешенными связями, как правило, в соответствии с определенной сетевой архитектурой (Reed and Marks, 1998).В течение нескольких десятилетий эти инструменты использовались для выполнения контролируемого обучения путем настройки весов этих ссылок на основе данных обучения. В области робототехники ИНС обычно используются для измерения окружающей среды или эффекторного управления, включая решение ИК (Bouganis and Shanahan, 2010; Duka, 2014; Almusawi et al., 2016).
Наши результаты были получены с использованием многослойного персептрона с прямой связью, включающего два полностью связанных скрытых слоя из 64 и 128 нейронов соответственно.Мы использовали бэкэнд TensorFlow (Abadi et al., 2015) и Keras (Chollet, 2015), программный интерфейс Python для ИНС, чтобы реализовать и обучить эту сеть для выполнения решения IK, то есть: принимать координаты конечной точки в качестве входных данных и возвращать соответствующие углы сочленения на выходе.
По сравнению с использованием IKPy, реализация этого метода более требовательна и требует выполнения ранее описанного двухфазного процесса сбора данных с использованием оборудования захвата движения. Однако, поскольку этот метод основан на движениях, выполняемых физическим роботом, а не на механически совершенной модели, ИНС неявно учитывает отклонения между командами двигателя, отправляемыми роботу, и углами, фактически достигаемыми двигателями.В результате этот метод оказался более точным, чем метод локальной оптимизации с реальным роботом (среднее расстояние до цели = 25 мм, стандартное отклонение 11 мм). В частности, он не страдает от вышеупомянутого вертикального смещения, поскольку ошибка положения по вертикальной оси не более смещена от центра, чем по горизонтальным осям (в среднем <14 мм для всех трех осей). С другой стороны, время вычислений, необходимое для выполнения одного решения IK с помощью этого метода, неизменно оставалось менее 1 мс, что доказывает, что это намного быстрее, чем локальная оптимизация.
Кроме того, построение тренировочного набора посредством демонстрации поз вручную позволяет пользователям сознательно вносить предвзятость в пользу определенного типа позы. Таким образом, такая предвзятость будет неявно изучаться и эмулироваться сетью, поскольку ее выходные данные будут по замыслу аналогичны позам обучающей выборки. Например, если записываются только позы с горизонтальной рукой и ладонью, обращенными вниз, практически все углы суставов, возвращаемые сетью, должны соответствовать позам, отображающим ту же характеристику.
Что касается структуры сети, мы заметили, что добавление большего количества скрытых слоев или увеличение их размера не дает значительных преимуществ и даже может привести к тому, что сеть переоборудует примеры, при этом заметно увеличивая время, необходимое для ее обучения. Основываясь на этих наблюдениях, мы предполагаем, что более сложные сетевые архитектуры, такие как сверточные или рекуррентные сети, могут не подходить для решения этой проблемы IK.
В заключение по теме решения ИК для Reachy мы представили здесь два метода с заметными различиями в точности, практичности или удобстве.Эти методы также демонстрируют, как Reachy выигрывает от возможности подключения и настройки, поскольку можно использовать различные решения для предоставления аналогичных функций, чтобы пользователи могли выбрать решение, соответствующее их потребностям. Для выполнения управления положением конечной точки могут использоваться другие подходы, основанные либо на существующих методах из литературы, либо на разработанном ad hoc с более конкретными требованиями.
3.2. Дистанционное управление
На основе функции управления положением конечной точки, доступной с помощью этих методов решения IK, мы разработали второе доказательство концепции, которое мы называем «дистанционное управление».«Цель этого доказательства концепции — предоставить пользователям интуитивно понятный и прозрачный способ управления роботом в реальном времени, который не требует от них отправки явных количественных команд, таких как углы сочленений или координаты конечных точек. С этой целью дистанционный режим вождения работает, непрерывно отслеживая траекторию движения руки объекта и одновременно отображая ее на руке робота, считая ее конечной точкой.
Наша реализация этого режима вождения использует Optitrack V120 Trio в качестве системы отслеживания движения для определения трехмерного положения маркера, помещенного на руку.Мы связали устройство с программой Python с помощью OptiRX (Астанин, 2016) для получения данных маркеров в реальном времени с частотой 120 Гц. Перед фазой управления выполняется калибровка, чтобы установить связь между системой отсчета объекта, в которой выражены данные маркера, и системой отсчета робота, в которой должны быть выражены координаты конечной точки. Затем руки робота и испытуемого принимают одинаковое исходное положение: плечевая кость вдоль тела, а локоть согнут на 90 ° (см. Рисунок 4).В этой позе положения рук объекта и робота сохраняются, чтобы работать как исходные точки в соответствующих кадрах. В каждый момент цикла управления с частотой 10 Гц первый используется для вычисления мгновенного вектора смещения руки испытуемого, затем последний используется для вычисления целевого положения руки робота путем отображения этого вектора в кадре робота. Наконец, используя метод решения IK, Reachy приводится в движение, так что его конечная точка направляется к этой мгновенной цели.
Рисунок 4 .Настройка дистанционного управления, показанная на этапе калибровки. Субъект и робот принимают одну и ту же позу, в то время как система Optitrack (слева) записывает координаты отражающего маркера, помещенного на руку субъекта. См. Этот режим вождения в действии на https://www.youtube.com/watch?v=Oa9mHMoDtYI.
В результате субъект может управлять роботом, выполняя естественные движения рук, наблюдая, как Ричи их отражает, и используя эту визуальную обратную связь для регулировки движения робота.Очевидно, время обработки, а также тот факт, что двигатели не могут мгновенно достичь целевых углов, отправленных в виде команд, вносят задержку между движением конечной точки и траекторией руки объекта. В текущих настройках эта задержка обычно составляет от 350 до 450 мс. Это доказательство концепции иллюстрирует, как можно реализовать стратегию управления с помощью Reachy, то есть: способ привести ее в действие на основе данных, полученных с внешних устройств. Он также демонстрирует, как можно управлять Reachy в режиме реального времени, выполняя плавные и устойчивые движения.
Видеоклип, показывающий, как субъект управляет роботом в дистанционном режиме, доступен в Интернете.
3.3. Контроль взгляда
Следуя за вспомогательными устройствами на основе зрения, мы разработали второе доказательство концепции, чтобы исследовать, как движения глаз и поведение взгляда могут быть использованы в качестве источника команд для приведения Ричи в движение. С этой целью мы попытались связать робота с инструментами отслеживания взгляда и обработки изображений, чтобы позволить субъекту управлять Ричи, двигая только глазами, а не конечностями.Отслеживание взгляда — это категория методов, направленных на измерение движений глаз или направления взгляда, будь то для целей наблюдения или в качестве входных данных в интерактивной установке (Духовски, 2003). В области робототехники недавно были применены методы слежения за глазами для управления роботизированными руками, особенно с приложениями в реабилитации и вспомогательных технологиях (Frisoli et al., 2012; McMullen et al., 2014; Hortal et al., 2015).
Полученная установка основана на камере, снимающей сцену перед роботом, и на экране компьютера, отображающем его видеопоток для объекта.Камера размещается так, чтобы сцена соответствовала доступному пространству робота, а объекты размером с ладонь различных цветов и форм располагались в пределах ее досягаемости. Они размещены таким образом, чтобы не происходило визуального перекрытия с точки зрения камеры, и не возникало никаких физических препятствий, когда робот перемещал свою конечную точку к объекту. В этой настройке экран действует как двумерный прокси между рабочим пространством робота и полем обзора объекта, чтобы использовать технологию отслеживания взгляда в более простом контексте, чем трехмерное пространство.Мы использовали айтрекер GP3 HD (Gazepoint), чтобы определить местонахождение фокуса взгляда объекта на плоскости экрана и идентифицировать соответствующий объект в пространстве, в котором находится робот (см. Рисунок 5). Затем робот может быть приведен в движение к положению этого объекта либо с использованием предварительно записанных поз, либо с помощью комбинации обратной кинематики и компьютерного зрения в сцене перед роботом.
Рисунок 5 . Настройка управления взглядом. Справа перед левосторонней версией Ричи расположены различные объекты, и полученная сцена снимается камерой, размещенной над плечом робота.Его видеопоток отображается на экране слева, под которым размещен айтрекер. Субъект носит повязку Myo на правом предплечье, чтобы робот запускал движение. См. Этот режим вождения в действии на https://www.youtube.com/watch?v=qloR67AaqQ4.
Наконец, используя повязку Myo (Thalmic Labs Inc.), мы также интегрировали в эту установку базовую форму миоэлектрического контроля. Это измерительное устройство позволяет обнаруживать определенный паттерн активации мышц, который можно интерпретировать как командный сигнал.Таким образом, субъект может, например, произвольно сокращать мышцы предплечья, чтобы вызвать движение робота. Каждый раз, когда обнаруживается такой сигнал, объект, на котором сфокусирован взгляд субъекта, идентифицируется системой слежения за глазами, и Ричи соответственно приводится в движение.
Стоит отметить, что обработка данных взгляда, выполняемая для идентификации интересующего объекта, остается очень простой в этой упрощенной настройке. В повседневной жизни поза субъекта будет неограниченной.Более того, среда, в которой субъект действует, выполняя свою инструментальную повседневную деятельность, загромождена. Отвлекающие факторы и смена сцены провоцируют саккады. При удерживании взгляда на целевом объекте геометрия в динамической сцене также нестабильна из-за микросаккад. Вот почему необходима фильтрация сигнала фиксации взгляда по времени (González-Díaz et al., 2019). Более того, сегодня локализация объектов в области, предсказываемой взглядом, может быть решена вместе с задачей распознавания объектов с использованием мощных глубоких классификаторов CNN.Это позволяет более точно локализовать объект, а также адаптироваться к динамике сцены из-за неограниченного движения объекта.
Исходный код, использованный в этом доказательстве концепции, доступен в Интернете. Видеоклип, показывающий, как объект выполняет управление взглядом, доступен в Интернете.
4. Заключение и перспективы
Reachy, роботизированная рука с семью степенями свободы, похожая на человека, была разработана в качестве испытательной платформы для исследований роботизированных рук, управляемых людьми. Следуя подходу с открытым исходным кодом, его дизайн был разработан, чтобы обеспечить простой обмен и низкую стоимость изготовления, с целью обеспечения возможности обширной настройки в широком спектре приложений.Программные и аппаратные ресурсы были доступны в Интернете, чтобы исследователи и непрофессионалы могли создать робота Reachy и интегрировать его в свои собственные эксперименты и проекты.
В краткосрочной перспективе непосредственные применения Reachy включают исследование, разработку и тестирование стратегий управления и интерфейсов для роботизированного оружия. Таким образом, было создано несколько прототипов и разработаны доказательства концепций, чтобы проиллюстрировать возможные варианты использования в различных областях, связанных с робототехникой, управляемой человеком.В качестве платформы с широким охватом он позволяет исследовать гибридные стратегии управления, комбинируя биомеханические сигналы с инструментами отслеживания движения или взгляда и методами компьютерного зрения (de San Roman et al., 2017; González-Díaz et al., 2019). Reachy также может помочь изучить, как стратегии контроля на основе зрения могут помочь в управлении реабилитационными устройствами, такими как вспомогательная рука, прикрепленная к инвалидному креслу, для использования пациентами с травмой спинного мозга (SCI) (Corbett et al., 2013, 2014).
В долгосрочной перспективе Reachy можно использовать в качестве макета устройства для исследований и тренировок с нейропротезами верхних конечностей.В частности, это может помочь пациентам познакомиться с производством мышечных сигналов и миоэлектрическим контролем до того, как им будет соответствовать реальный протез руки. Кроме того, благодаря опциям управления двигателями Reachy подходит для лечения различных уровней ампутации, используя отдельные режимы управления для управления проксимальными и дистальными суставами. Например, как способ имитации чрескожной ампутации, Reachy можно контролировать с помощью «гибридного» режима телеоперации, в котором плечевые суставы воспроизводят реальное движение плеча пациента, в то время как другие двигатели управляются с помощью отдельной стратегии искусственного управления.Подобные подходы были исследованы в недавних работах (Kaliki et al., 2013; Merad et al., 2016), где естественное движение плеча (выполняемое субъектом) используется для вывода искусственного движения локтя и / или запястья (выполняемого виртуальным аватаром). или носимый протез). В общем, Reachy может оказаться универсальным устройством, подходящим для приложений с несколькими подходами для управления нейропротезом верхней конечности.
Доступность данных
Все наборы данных, созданные для этого исследования, включены в рукопись и / или дополнительные файлы.
Авторские взносы
SM участвовал в разработке доказательств концепции под руководством P-YO и AR и написал статью. ML и PR разработали робота и участвовали в разработке доказательств концепции. CH участвовал в разработке доказательств концепции. JB-P, FP и DC предоставили входы для написания бумаги. Все авторы одобрили окончательную версию.
Финансирование
Эта работа финансировалась двумя грантами PEPS CNRS / IdEx Bordeaux (2014 и 2015) и грантом CNRS Osez l’interdisciplinarité (2017–2019).
Заявление о конфликте интересов
ML и PR связаны с Pollen Robotics, компанией, имеющей финансовые интересы в системе, представленной в этой работе, в качестве ее основного поставщика.
Остальные авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы хотели бы поблагодарить Лайонела Парра-Иглесиаса за разработку и печать деталей скелета, Филиппа Шове за разработку и сборку опоры робота и Лукаса Дюре за создание рисунка 4.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/fnbot.2019.00065/full#supplementary-material
Сноски
Список литературы
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z., Citro, C., et al. (2015). TensorFlow: крупномасштабное машинное обучение в гетерогенных системах .
Google Scholar
Альмусави, А. Р., Дюльгер, Л. К., и Капуцу, С. (2016). Новый подход искусственной нейронной сети к решению обратной кинематики манипулятора робота (Denso VP6242). Comput. Intell. Neurosci . 2016: 5720163. DOI: 10.1155 / 2016/5720163
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Астанин, С. (2016). Библиотека на чистом Python для получения данных захвата движения от движка потоковой передачи OptiTrack .
Google Scholar
Bae, J.-H., Park, J.-H., Oh, Y., Ким, Д., Чой, Ю., и Ян, В. (2015). Управление пространством задач с учетом жесткости пассивных мышц для избыточных роботов-манипуляторов. Intell. Серв. Робот. 8, 93–104. DOI: 10.1007 / s11370-015-0165-2
CrossRef Полный текст | Google Scholar
Белтер, Дж. Т., и Доллар, А. М. (2013). «Новый дифференциальный механизм, позволяющий использовать две степени свободы на одном приводе: приложение к протезу руки», в Международная конференция IEEE 2013 г. по реабилитационной робототехнике (ICORR) (Сиэтл, Вашингтон, IEEE), 1–6.
Google Scholar
Биддисс, Э.А., и Чау, Т. Т. (2007). Использование и отказ от протезирования верхней конечности: исследование за последние 25 лет. Prosthet. Ортопедия. Int. 31, 236–257. DOI: 10.1080 / 03093640600994581
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Блана Д., Кириаку Т., Ламбрехт Дж. М. и Чедвик Э. К. (2016). Возможность использования комбинированных ЭМГ и кинематических сигналов для управления протезом: имитационное исследование в среде виртуальной реальности. J. Electromyogr. Кинезиол. 29, 21–27. DOI: 10.1016 / j.jelekin.2015.06.010
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Буганис, А., и Шанахан, М. (2010). «Обучение нейронной сети с пиковыми сигналами для управления роботизированной рукой с 4 степенями свободы на основе пластичности, зависящей от времени пиков», в Международной совместной конференции по нейронным сетям (IJCNN) 2010 г., (Барселона: IEEE), 1–8.
Google Scholar
Бриджес, М. М., Пара, М. П. и Машнер, М.J. (2011). Архитектура системы управления модульным протезом конечности. Johns Hopkins APL Techn. Дайджест 30, 217–222.
Google Scholar
Корбетт, Э. А., Кёрдинг, К. П., и Перро, Э. Дж. (2013). Оценка в реальном времени неинвазивного нейропротезного интерфейса для контроля досягаемости. IEEE Trans. Neural Syst. Rehabil. Англ. 21, 674–683. DOI: 10.1109 / TNSRE.2013.2251664
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Корбетт, Э.А., Сакс, Н. А., Кёрдинг, К. П., и Перро, Э. Дж. (2014). Мультимодальное декодирование и согласованная сенсорная информация повышают эффективность работы субъектов с травмой шейного отдела спинного мозга. Фронт. Neurosci. 8: 123. DOI: 10.3389 / fnins.2014.00123
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Cordella, F., Ciancio, A. L., Sacchetti, R., Davalli, A., Cutti, A. G., Guglielmelli, E., et al. (2016). Обзор литературы о потребностях пользователей протезами верхней конечности. Фронт. Neurosci. 10: 209. DOI: 10.3389 / fnins.2016.00209
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Доусон, М. Р., Шерстан, К., Кэри, Дж. П., Хеберт, Дж. С., и Пиларски, П. М. (2014). Разработка Bento Arm: усовершенствованная роботизированная рука для миоэлектрических тренировок и исследований. Proc. MEC 14, 60–64. DOI: 10.13140 / 2.1.3118.4640
CrossRef Полный текст | Google Scholar
de San Roman, P. P., Benois-Pineau, J., Доменджер, Ж.-П., Паклет, Ф., Каттаерт, Д., и де Руги, А. (2017). Распознавание объектов на основе эгоцентрических роликов с глубоким CNN: к применению при нейропротезах. Comput. Vis. Понимание изображений. 164, 82–91. DOI: 10.1016 / j.cviu.2017.03.001
CrossRef Полный текст | Google Scholar
Духовский, А. Т. (2003). Методология отслеживания взгляда: теория и практика . Лондон, Великобритания: Springer.
Google Scholar
Дука, А.-V. (2014). Решение обратной кинематики на основе нейронной сети для отслеживания траектории робота-манипулятора. Proc. Technol. 12, 20–27. DOI: 10.1016 / j.protcy.2013.12.451
CrossRef Полный текст | Google Scholar
Фриз, М. А. (2015). Платформа для экспериментов с виртуальными роботами . Цюрих: Coppelia Robotics.
Google Scholar
Фризоли, А., Локонсол, К., Леонардис, Д., Банно, Ф., Барсотти, М., Чизари, К. и др. (2012). Новое управление экзоскелетом верхней конечности, управляемое взглядом, для реабилитации в реальных задачах. IEEE Trans. Syst. Человек Киберн. Часть C 42, 1169–1179. DOI: 10.1109 / TSMCC.2012.2226444
CrossRef Полный текст | Google Scholar
Джильи А., Гийсбертс А., Грегори В., Коннолато М., Ацори М. и Капуто Б. (2017). Визуальные подсказки для улучшения миоэлектрического контроля протезов верхних конечностей. arXiv [Препринт]. arXiv: 1709.02236 . DOI: 10.1109 / BIOROB.2018.8487923
CrossRef Полный текст | Google Scholar
Гонсалес-Диас, И., Бенуа-Пино, Х., Доменджер, Ж.-П., Каттаерт, Д., и де Руги, А. (2019). Управляемые восприятием глубокие нейронные сети для прогнозирования действий эго: захват объекта. Распознавание образов. 88, 223–235. DOI: 10.1016 / j.patcog.2018.11.013
CrossRef Полный текст | Google Scholar
Гребенштейн, М., Альбу-Шеффер, А., Бальс, Т., Шалон, М., Эйбергер, О., Фридл, В. и др. (2011). «Система руки DLR», Международная конференция IEEE по робототехнике и автоматизации, 2011 г. (Шанхай: IEEE), 3175–3182.
Google Scholar
Ха И., Тамура Ю., Асама Х., Хан Дж. И Хонг Д. В. (2011). «Разработка открытой гуманоидной платформы DARwIn-OP», , 2011 г., Материалы Ежегодной конференции SICE (SICE) (Токио: IEEE), 2178–2181.
Google Scholar
Хаушильд М., Давуди Р. и Лоеб Г. Э. (2007). Среда виртуальной реальности для проектирования и подгонки нервных протезов. IEEE Trans. Neural Syst. Rehabil. Англ. 15, 9–15. DOI: 10.1109 / TNSRE.2007.891369
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Хильд, М., Зидель, Т., Бенкендорф, К., Тиле, К., и Шпрангер, М. (2012). «Мион, новый гуманоид», в Language Grounding in Robots , ред. Л. Стилс и М. Хилд (Нью-Йорк, Нью-Йорк: Спрингер), 25–44.
Google Scholar
Хортал, Э., Яньес, Э., Убеда, А., Перес-Видаль, К., и Азорин, Дж. М. (2015). Сочетание интерфейса мозг-машина и интерфейса электроокулографии для выполнения задач по подбору и размещению с помощью роботизированной руки. Робот. Auton. Syst. 72, 181–188. DOI: 10.1016 / j.robot.2015.05.010
CrossRef Полный текст | Google Scholar
Йоханнес, М.С., Бигелоу, Дж. Д., Берк, Дж. М., Харшбаргер, С. Д., Козловски, М. В., и Ван Дорен, Т. (2011). Обзор процесса разработки модульного протеза конечности. Johns Hopkins APL Techn. Дайджест 30, 207–216.
Google Scholar
Калики Р. Р., Давуди Р. и Лоеб Г. Э. (2013). Оценка неинвазивной схемы команд для протезов верхних конечностей в виртуальной реальности. IEEE Trans. Биомед. Англ. 60, 792–802. DOI: 10.1109 / TBME.2012.2185494
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Каниц, Г., Монтаньяни, Ф., Контроцци, М., и Чиприани, К. (2018). Податливые протезы запястья более естественны, чем жесткие запястья при дотягивании, а не (обязательно) во время манипуляции. IEEE Trans. Neural Syst. Rehabil. Англ. 26, 1407–1413. DOI: 10.1109 / TNSRE.2018.2847565
CrossRef Полный текст | Google Scholar
Клюйвер, Т., Ragan-Kelley, B., Pérez, F., Granger, B.E., Bussonnier, M., Frederic, J., et al. (2016). «Блокноты Jupyter — формат публикации для воспроизводимых вычислительных рабочих процессов», в Positioning and Power in Academic Publishing: Players, Agents and Agendas , ред. Л. Фернандо и С. Биргит (Геттинген: IOS Press), 87–90.
Google Scholar
Краус, Н. Э., Роррер, Р. А., и Вейр, Р. Ф. (2016). Разработка и изготовление руки с открытым исходным кодом с шестью степенями свободы. IEEE Trans.Neural Syst. Rehabil. Англ. 24, 562–572. DOI: 10.1109 / TNSRE.2015.2440177
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Lapeyre, M., Rouanet, P., Grizou, J., Nguyen, S., Depraetre, F., Le Falher, A., and Oudeyer, P.-Y. (2014). «Проект Poppy: изготовление с открытым исходным кодом трехмерного напечатанного робота-гуманоида для науки, образования и искусства», в Digital Intelligence 2014 (Нант), 6.
Google Scholar
Лапейр, М., Руане, П., и Аудейер, П.-Y. (2013). «Маковая гуманоидная платформа: экспериментальная оценка роли био-формы бедра», , 2013 г., 13-я Международная конференция IEEE-RAS по роботам-гуманоидам (гуманоиды), (Атланта, Джорджия: IEEE), 376–383.
Google Scholar
Лозье, Ю., Клоусон, А., Уилсон, А., Схем, Э., Энглхарт, К., Киберд, П. и др. (2011). «Обзор системы рук UNB», , представленный на симпозиуме по миоэлектрическому контролю (Фредериктон, Северная Каролина).
Google Scholar
Ly, O., Lapeyre, M., and Oudeyer, P.-Y. (2011). «Биовдохновленный позвоночник, комплаентность и полупассивная динамика в легком гуманоидном роботе», в Международная конференция IEEE / RSJ по интеллектуальным роботам и системам (IROS), 2011 г., (Сан-Франциско, Калифорния: IEEE), 1465–1472.
Google Scholar
Манцерон, П. (2015). Производительность и модульность библиотеки обратной кинематики .
Google Scholar
Маркович, М., Дозен, С., Чиприани, К., Попович Д., Фарина Д. (2014). Стереозрение и дополненная реальность для управления захватом в протезах кисти с обратной связью. J. Neural Eng. 11: 046001. DOI: 10.1088 / 1741-2560 / 11/4/046001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Маркович, М., Дозен, С., Попович, Д., Грейманн, Б., и Фарина, Д. (2015). Слияние датчиков и компьютерное зрение для контекстно-зависимого управления протезом с несколькими степенями свободы. J. Neural Eng. 12: 066022.DOI: 10.1088 / 1741-2560 / 12/6/066022
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Маркович, М., Карнал, Х., Грейманн, Б., Фарина, Д., и Дозен, С. (2017). GLIMPSE: интерфейс Google Glass для сенсорной обратной связи в миоэлектрических протезах рук. J. Neural Eng. 14: 036007. DOI: 10.1088 / 1741-2552 / aa620a
PubMed Аннотация | CrossRef Полный текст | Google Scholar
МакМаллен, Д. П., Хотсон, Г., Катиаль, К. Д., Вестер, Б. А., Файфер, М.С., МакГи, Т. Г. и др. (2014). Демонстрация полуавтономного гибридного интерфейса мозг-машина с использованием внутричерепной ЭЭГ человека, отслеживания взгляда и компьютерного зрения для управления роботизированным протезом верхней конечности. IEEE Trans. Neural Syst. Rehabil. Англ. 22, 784–796. DOI: 10.1109 / TNSRE.2013.2294685
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Микер, К., Расмуссен, Т., и Чокарли, М. (2018). Интуитивно понятная ручная телеоперация для начинающих операторов с использованием непрерывного подпространства телеоперации. arXiv [Препринт] arXiv: 1802.04349 . DOI: 10.1109 / ICRA.2018.8460506
CrossRef Полный текст | Google Scholar
Merad, M., de Montalivet, E., Roby-Brami, A., and Jarrassé, N. (2016). «Интуитивное управление протезом с использованием межсуставной координации верхней конечности и измерения углов плеча на основе IMU: пилотное исследование», Международная конференция IEEE / RSJ по интеллектуальным роботам и системам (IROS), 2016 г., (Тэджон: IEEE), 5677–5682 .
Google Scholar
Новак, Д., и Riener, R. (2015). Обзор методов объединения сенсоров в носимой робототехнике. Робот. Auton. Syst. 73, 155–170. DOI: 10.1016 / j.robot.2014.08.012
CrossRef Полный текст | Google Scholar
Фелан, И., Арден, М., Гарсия, К., и Рост, К. (2015). «Изучение виртуальной реальности и протезирование», в Virtual Reality (VR), 2015 (Арль: IEEE), 353–354.
Google Scholar
Ракита Д., Мутлу Б. и Глейхер М. (2017). «Метод ретаргетинга движения для эффективного телеуправления манипуляторами роботов на основе имитации», в материалах Proceedings of the 2017 ACM / IEEE International Conference on Human-Robot Interaction (Vienna: ACM), 361–370.
Google Scholar
Ракита Д., Мутлу Б. и Глейхер М. (2018). «RelaxedIK: синтез точного и возможного движения руки робота в реальном времени», в Proceedings of Robotics: Science and Systems (Питтсбург, Пенсильвания).
Google Scholar
Рид Р. Д. и Маркс Р. Дж. (1998). Neural Smithing: контролируемое обучение в искусственных нейронных сетях с прямой связью . Кембридж, Массачусетс: MIT Press.
Google Scholar
Шварц, М., Pastrana, J., Allgeuer, P., Schreiber, M., Schueller, S., Missura, M., et al. (2013). «Гуманоидная открытая платформа подросткового размера NimbRo-OP», в Чемпионат мира по футболу среди роботов , ред. С. Бенке, М. Велозо, А. Виссер и Р. Сюн (Берлин: Springer), 568–575.
Google Scholar
Stoelen, M. F., Bonsignorio, F., and Cangelosi, A. (2016). «Совместное исследование антагонизма исполнительных механизмов и био-вдохновленного управления в печатной руке робота», в International Conference on Simulation of Adaptive Behavior (Aberystwyth: Springer), 244–255.
Google Scholar
Ван Х., Дун Х., Чен З. и Ши Б. Э. (2015). «Гибридный взгляд / мозговой компьютерный интерфейс ЭЭГ для управления рукой робота при выполнении задачи выбора и размещения», в журнале Engineering in Medicine and Biology Society (EMBC), 2015 37-я ежегодная международная конференция IEEE (Милан: IEEE), 1476–1479 .
Google Scholar
Zucker, M., Joo, S., Gray, M. X., Rasmussen, C., Huang, E., Stilman, M., et al. (2015). Универсальная система дистанционного управления роботом-гуманоидом DRC-HUBO. J. Полевой робот. 32, 336–351. DOI: 10.1002 / rob.21570
CrossRef Полный текст | Google Scholar
ученых привносят в роботизированную руку осязание: выстрелы
Президент Барак Обама столкнулся с Натаном Коуплендом во время экскурсии по инновационным проектам на конференции White House Frontiers Conference в Университете Питтсбурга в 2016 году. Сьюзан Уолш / AP скрыть подпись
переключить подпись Сьюзан Уолш / APПрезидент Барак Обама стукнулся кулаками с Натаном Коуплендом во время экскурсии по инновационным проектам на конференции White House Frontiers Conference в Университете Питтсбурга в 2016 году.
Сьюзан Уолш / APРоботизированная рука с осязанием позволяет парализованному человеку быстро выполнять такие задачи, как переливание воды из одной чашки в другую.
Роботизированная рука обеспечивает тактильную обратную связь непосредственно с мозгом человека, когда он использует свои мысли для управления устройством, сообщает группа ученых в четверг в журнале Science.
Предыдущие версии руки требовали, чтобы участник, Натан Коупленд, управлял рукой, используя только зрение.
«Когда у меня была только визуальная обратная связь, я мог видеть, что рука коснулась объекта», — говорит Коупленд. «Но иногда я шел, чтобы поднять его, и он выпадал».
На выполнение типичного задания по захвату у Коупленда также уходило около 20 секунд. «Благодаря сенсорной обратной связи он смог завершить это за 10», — говорит Дженнифер Коллингер, доцент кафедры физической медицины и реабилитации Питтсбургского университета.
Тактильная информация важна для использования роботизированной руки протеза конечности, потому что трудно схватить объект, который вы не чувствуете, говорит Коллингер.
«Даже такая простая вещь, как поднятие чашки и попытка поддерживать соответствующее давление при перемещении ее в другое место, во многом зависит от тактильной обратной связи от вашей руки», — говорит она.
Итак, Коллингер и группа исследователей потратили годы на поиск способов добавить сенсорную обратную связь к руке и руке робота.
Команда работала с Коуплендом, который был парализован в результате несчастного случая в подростковом возрасте более 15 лет назад. Он научился управлять движениями манипулятора с помощью интерфейса мозг-компьютер.
Команда начала с размещения электродов в области мозга Коупленда, которая обрабатывает сенсорную информацию. Это позволило им использовать электрические импульсы для имитации ряда ощущений.
«Оказалось, что стимуляция областей мозга, связанных с кончиками пальцев, вызывала ощущения, которые, как казалось, исходили от руки участника», — говорит Коллингер.
Затем команда выяснила, как генерировать эти сигналы, когда роботизированная рука и рука контактируют с чем-то.Последним шагом было отследить время, в течение которого Коупленд выполнял такие задачи, как поднятие блока или налив воды, с тактильной обратной связью и без нее.
Результаты показали, что Коупленд может выполнять некоторые ручные задачи примерно так же быстро, как человек, использующий свою руку.
«Ощущение фактически меняет интенсивность в зависимости от того, какое усилие рука прилагает к объекту», — говорит Коупленд. «Так что я мог также сказать, крепко ли я держался за него или нет».
Copeland говорит о дополнительном преимуществе: добавление ощущения прикосновения, которое делает использование роботизированной руки более естественным.
«Управление настолько интуитивно понятное, что я просто думаю о вещах, как если бы я двигал собственной рукой», — говорит он.
Результаты имеют значение не только для роботизированного оружия, — говорит Джереми Д. Браун, доцент кафедры машиностроения Университета Джонса Хопкинса Джона К. Мэлоуна.
Высокотехнологичные протезы также работают лучше, если имитируют осязание, — говорит он. Некоторые делают это путем вибрации или предоставления какой-либо другой формы тактильной обратной связи — тот же подход, который используют многие смартфоны, чтобы помочь пользователям печатать на экране.
Последние протезы рук «работают так же, как и наши естественные конечности», — говорит Браун. Они могут сгибаться в локтях, вращаться в запястьях и хвататься пальцами.
«Но когда вы даете кому-то возможность контролировать эти вещи, пока у них не появится тактильное ощущение, это будет неуклюже», — говорит он.
И большинство датчиков по-прежнему обладают лишь элементарными возможностями, говорит он, например, определять сопротивление или температуру.
Когда его собственная рука касается чего-либо, Браун говорит: «Я чувствую давление, я чувствую скольжение, я чувствую, влажный или сухой предмет, я чувствую его текстуру, я знаю, грубый ли он, гладкий ли он. .«
Ученые только начинают учиться создавать искусственные руки и пальцы, которые могут обнаруживать эти тонкие особенности объекта. И поскольку протезы или роботизированные конечности обеспечивают более сенсорную обратную связь, они станут более полезными, — говорит Браун.
Но он говорит, что осязание — это больше, чем просто повышение ловкости.
«Это не просто возможность залезть в карман и схватить ключи», — говорит он. связь.«
Эта роботизированная рука, управляемая мозгом, может крутиться, хвататься и ощущать
Поскольку мозг Коупленда не был поврежден в результате аварии, он все еще может — теоретически — управлять этим диалогом входов и выходов. Но большая часть электрических сигналов от нервов в его теле не доходила до мозга. Когда команда из Питтсбурга привлекла его к своему исследованию, они хотели разработать обходной путь. Они считали, что мозг парализованного человека может как стимулировать роботизированную руку, так и стимулироваться электрическими сигналами от нее, в конечном итоге интерпретируя эту стимуляцию как ощущение прикосновения к собственной руке.Задача заключалась в том, чтобы все казалось естественным. Запястье робота должно повернуться, когда Коупленд намеревался повернуть его; рука должна сомкнуться, когда он намеревался схватить; и когда роботизированный мизинец касается твердого предмета, Коупленд должен почувствовать это своим мизинцем.
Из четырех массивов микроэлектродов, имплантированных в мозг Коупленда, две сетки считывают намерения движения от его моторной коры для управления роботизированной рукой, а две сетки стимулируют его сенсорную систему. С самого начала исследовательская группа знала, что они могут использовать BCI для создания тактильных ощущений для Коупленда, просто подавая электрический ток на эти электроды — никаких реальных прикосновений или робототехники не требуется.
Для создания системы исследователи воспользовались тем фактом, что Коупленд сохраняет некоторую чувствительность в большом, указательном и среднем пальцах правой руки. Исследователи натерли там ватную палочку, пока он сидел за магнитным сканером мозга, и обнаружили, какие конкретные контуры мозга соответствуют этим пальцам. Затем исследователи расшифровали его намерения двигаться, записав активность мозга с отдельных электродов, пока он воображал определенные движения. И когда они включили ток на определенные электроды в его сенсорной системе, он это почувствовал.Ему кажется, что это ощущение исходит от основания его пальцев, около верхней части правой ладони. Это может быть естественное давление, тепло или странное покалывание, но он никогда не испытывал боли. «На самом деле я просто смотрел на свою руку, пока это происходило, типа:« Чувак, это действительно похоже на то, что кто-то может тыкать прямо здесь », — говорит Коупленд.
После того, как они установили, что Коупленд может испытывать эти ощущения, и что исследователи знали, какие области мозга нужно стимулировать для создания ощущений в разных частях его рук, следующим шагом было просто научить Коупленда управлять рукой робота.Он и группа исследователей организовали в лаборатории учебную комнату, развесив плакаты с изображениями Pac Man и кошачьих мемов. Три дня в неделю исследователь прикреплял соединитель электрода от своего скальпа к набору кабелей и компьютеров, а затем они засекали его, когда он хватал блоки и сферы, перемещая их слева направо. За пару лет он стал чертовски хорош. Он даже продемонстрировал систему тогдашнему президенту Бараку Обаме.
Но затем, по словам Коллингера, «он вроде как остановился на своем высоком уровне производительности.«Непарализованному человеку потребуется около пяти секунд, чтобы выполнить задание по перемещению объекта. Коупленд иногда мог сделать это за шесть секунд, но его среднее время составляло около 20.
Чтобы справиться с проблемой, пришло время попробовать дать ему обратную связь касания в реальном времени с руки робота.
Человеческие пальцы ощущают давление, и возникающие электрические сигналы передаются по нитевидным аксонам от руки к мозгу. Команда отразила эту последовательность, поместив датчики на кончики пальцев робота. Но объекты не всегда касаются кончиков пальцев, поэтому более надежный сигнал должен был поступать откуда-то еще: датчики крутящего момента в основании механических цифр.
Представьте роботизированный палец как рычаг с шарниром только на одном конце, где он соединяется с ладонью робота. Роботизированные пальцы хотят оставаться на месте, если BCI не приказывает им двигаться. Любое движение вперед или назад по длине пальца будет регистрировать вращающую силу на этом шарнире. «Возможно, это не самый очевидный датчик для использования», — говорит Роберт Гонт, который вместе с Коллингером руководил исследованием, но он оказался очень надежным. Электрические сигналы от этого датчика крутящего момента передаются на BCI, который затем стимулирует имплантированный мозговой электрод, связанный с соответствующим пальцем Коупленда.
Роботизированная рука, управляемая разумом, не обязательно должна означать имплантаты мозга.
Роботизированная рука плавно отслеживает движения курсора на экране компьютера, контролируемые мозговой активностью человека, сидящего рядом и смотрящего прямо перед собой. Человек носит шапочку, покрытую электродами.
Эта «управляемая разумом» конечность робота управляется интерфейсом мозг-компьютер (BCI), который обеспечивает прямую связь между нейронной информацией мозга, подключенной к устройству электроэнцефалографии (EEG), и внешним объектом.
Это передовое исследование проводится учеными из Университета Карнеги-Меллона. В конечном итоге эта работа может привести к созданию технологий, которые могут облегчить повседневную жизнь людей, страдающих параличом или страдающих двигательными расстройствами.
Этот проект имеет большое значение, поскольку BCI, управляющие подобными роботизированными устройствами, обычно используют сигналы от мозговых имплантатов. Ведущий исследователь Бин Хе, руководитель отдела биомедицинской инженерии в Университете Карнеги-Меллона, сказал Engadget, что это первый случай, когда неинвазивный BCI успешно направил роботизированную руку для отслеживания курсора в плавном, непрерывном движении.
Он сказал, что прошлые попытки управлять роботизированной рукой с помощью BCI были связаны с «дискретными движениями», такими как дотянуться до объекта, схватить его и рывком направить в другое положение. Тот факт, что эта рука могла двигаться относительно плавными движениями, имеет большое значение.
Конечная цель — разработать полностью управляемый разум протез, который будет непрерывно двигаться для «естественных задач», таких как открытие дверей или захват еды на труднодоступной кухонной полке, добавил он.
Тот факт, что этот BCI неинвазивен, является ключевым. Имплантаты, которые были нормой, требуют значительного хирургического опыта для подключения к человеческому мозгу и могут быть дорогостоящими и очень опасными. В результате эти процедуры были выполнены в очень небольшом количестве случаев. Это новое исследование показывает, что ИМК, передающие сигналы мозга удаленно без имплантатов, могут быть такими же мощными и эффективными, как и те, которые требуют инвазивных процедур.
Пол Мараско, младший сотрудник научно-исследовательского института Лернера клиники Кливленда, сказал Engadget, что такая технология может изменить жизнь людей, которые в основном передвигаются с места на место на инвалидных колясках.
«Неинвазивный способ управления протезами конечностей по сигналам мозга без необходимости имплантированной коммуникации был бы очень полезен», — сказал Мараско, не связанный с этим исследованием. «Люди обычно не хотят рисковать имплантатом мозга, чтобы контролировать протез».
Инженерный колледж Университета Карнеги-Меллона
Бин Хе, который сотрудничал с исследователями из Университета Миннесоты в этом проекте, добавил, что по мере дальнейшего развития эта технология может предоставить «больше возможностей для значимого взаимодействия с другими людьми» и позволить им достичь большей самодостаточности.
Одна из коллег Мараско, Дон М. Тейлор, младший сотрудник отдела нейробиологии клиники Кливленда, сказала, что дать людям с двигательными нарушениями возможность управлять такими устройствами, как вспомогательный робот, имеет большой терапевтический потенциал. Возможность взаимодействия с этой робототехникой может поддерживать умственную и физическую активность людей, принося больше активности и стимуляции тем, кто не всегда может легко передвигаться.
«Существует множество простых и надежных неинвазивных способов управления одно- или двумерными движениями устройства помимо ЭЭГ, таких как датчики наклона головы, голосовые команды, айтрекеры, датчики, которые преобразуют активность удерживаемых мышц в «направленная команда», — сказал Engadget Тейлор, который также не участвует в этом исследовании.
Тейлор рассматривает эту технологию как «временную терапию», которую можно использовать для людей, перенесших инсульт или другие неврологические травмы.
Инженерный колледж Университета Карнеги-Меллона
Она добавила, что после того, как кто-то перенес инсульт, неврологи стремятся задействовать и переобучить оставшиеся мозговые цепи человека, чтобы улучшить контроль над движениями тела. Она сказала, что ЭЭГ можно комбинировать с другими реабилитационными методами, такими как нервно-мышечная стимуляция или экзоскелеты, которые вызывают движение в парализованной конечности.«
Она объяснила: «Используя мысли о движении для запуска движений конечностей с помощью устройств, можно потенциально укрепить и укрепить оставшиеся связи, помогая в процессе восстановления».
Мараско также сказал, что наиболее важным путем использования неинвазивной технологии BCI будет работа над системами ЭЭГ, которые можно носить в общественных местах и которые не «восприимчивы к шуму», что, по его словам, сейчас является «трудной задачей. . »
Со своей стороны, Бен Хе сказал, что, хотя он и его команда очень довольны своими открытиями, эта работа продолжается.Прежде чем он сможет покинуть лабораторию и быть распространен среди общества в целом, «нужно сделать многое».
«Мы планируем и дальше совершенствовать технологию и тестировать ее применение у пациентов с двигательными расстройствами», — сказал Бин Хе о следующих шагах.
А пока робот-рука, сидящая в лаборатории Хэ, указывает на обещание будущего, когда человеческий мозг и технологии будут работать вместе, чтобы сделать жизнь людей с двигательными расстройствами лучше.
Все продукты, рекомендованные Engadget, выбираются нашей редакционной группой, независимо от нашей материнской компании.Некоторые из наших историй содержат партнерские ссылки. Если вы покупаете что-то по одной из этих ссылок, мы можем получать партнерскую комиссию.
Наблюдайте, как человек ест торт с помощью роботов, управляемых разумом
Поделиться
Статья
Вы можете поделиться этой статьей в соответствии с международной лицензией Attribution 4.0.
Новая система, объединяющая искусственный интеллект, робототехнику и интерфейс мозг-машина, делает шаг в направлении восстановления функций и автономии людей, не использующих в полной мере свои конечности.
Более 30 лет — после несчастного случая в подростковом возрасте — Роберт «Буз» Хмелевски был парализованным параличом с минимальным движением и ощущением в руках и пальцах. Но в ноябре он манипулировал двумя протезами руками своим мозгом, чтобы накормить себя десертом.
«Это довольно круто», — говорит Хмелевски, чье чувство выполненного долга было безошибочно узнавать после того, как он мысленно приказал роботизированным конечностям разрезать и накормить его кусочком золотого бисквита. «Я хотел иметь возможность делать больше.”
Почти два года назад Хмелевски перенес 10-часовую операцию на головном мозге в больнице Джона Хопкинса в Балтиморе в рамках клинического испытания, первоначально проводившегося Агентством перспективных исследовательских проектов Министерства обороны США и использующего передовые протезы конечностей, разработанные Лабораторией прикладной физики Джонса Хопкинса (APL). ).
Его цель состояла в том, чтобы позволить участникам управлять вспомогательными устройствами и обеспечивать восприятие физических стимулов (прикосновение к конечностям) с помощью нейросигналов из мозга.
Хирурги имплантировали шесть электродов в обе стороны его мозга, и через несколько месяцев он впервые смог продемонстрировать одновременный контроль над двумя протезами через интерфейс мозг-машина.
Исследователи были впечатлены его успехами в течение первого года испытаний и хотели еще больше расширить границы возможного. Команда запустила параллельное направление исследований, получившее название «умное протезирование», для разработки стратегий, обеспечивающих расширенное управление роботом и сенсорную обратную связь с обеих рук одновременно с использованием нейронной стимуляции.
Исследователи намеревались разработать систему с обратной связью, которая объединяет искусственный интеллект, робототехнику и интерфейс мозг-машина. В случае, когда Хмелевский подавал себе десерт, система позволяла ему контролировать движения, необходимые, чтобы разрезать пищу вилкой и ножом и покормить себя.
«Наша конечная цель — упростить выполнение таких действий, как прием пищи, заставить робота выполнять одну часть работы и предоставить пользователю, в данном случае Бузу, ответственность за детали: какую пищу съесть, где нарезать, насколько большой должна быть вырезанная деталь », — говорит Дэвид Хендельман, старший робототехник, специализирующийся на совместной работе человека и машины.«Комбинируя сигналы интерфейса мозг-компьютер с робототехникой и искусственным интеллектом, мы позволяем человеку сосредоточиться на наиболее важных частях задачи».
Франческо Теноре, нейробиолог и главный исследователь исследования Smart Prosthetics, говорит, что следующие шаги в этом направлении включают в себя не только расширение количества и видов повседневной активности, которые Баз может продемонстрировать с помощью этой формы взаимодействия человека и машины, но и предоставляя ему дополнительную сенсорную обратную связь по мере выполнения задач, чтобы ему не приходилось полагаться на зрение, чтобы узнать, преуспевает ли он.
«Идея состоит в том, что он испытает это так же, как здоровые люди могут« почувствовать », например, как они завязывают шнурки, не глядя на то, что они делают», — говорит Тенор.
В интервью незадолго до Дня благодарения — традиционного начала праздничного сезона, связанного с перееданием, — Баз размышлял о значении этого исследования для людей с ограниченными физическими возможностями. По его словам, такие ограниченные возможности, как его, отнимают у человека независимость, особенно его способность есть самостоятельно.
«Многие люди принимают это как должное. Возможность делать это самостоятельно и по-прежнему иметь возможность общаться с семьей — это меняет правила игры », — сказал он.
Исследование Smart Prosthetics финансировалось за счет внутреннего исследовательского гранта APL.
Источник: Университет Джона Хопкинса
Исследователи создали первую роботизированную руку с управляемым разумом, которая хорошо работает без хирургического вмешательства — TechCrunch
Исследователи Карнеги-Меллона, работающие со сверстниками из Университета Миннесоты, совершили большой прорыв в области интерфейса мозг-компьютер (BCI) и роботизированных технологий: они разработали способ, позволяющий человеку управлять роботизированной рукой с помощью своего разума — без хирургического вмешательства. или инвазивные процедуры, необходимые, чтобы сделать это возможным.
Робот, управляемый разумом, в этом эксперименте также продемонстрировал высокую степень контроля над моторикой, поскольку он способен отслеживать компьютерный курсор, когда он перемещается по экрану. Очевидно, что это огромный шаг вперед в этой области, поскольку он доказывает жизнеспособность управления компьютерами с помощью вашего мозга в более общем плане, что может иметь всевозможные потенциальные применения, не в последнюю очередь в отношении людей с параличом или другими видами расстройств, влияющих на движение альтернативный способ работы с компьютеризированными устройствами.
На сегодняшний день успешная, высокоточная демонстрация и реализация технологии BCI на людях зависит от систем, в которые встроены мозговые имплантаты, которые улавливают сигналы изнутри пользователя. Вживление этих устройств не только опасно, но и дорого и не обязательно полностью понимается с точки зрения их долгосрочного воздействия. Это привело к тому, что они не получили широкого распространения, а это означает, что лишь немногие люди смогли извлечь выгоду из их воздействия.
Прорыв исследовательской группы CMU и Университета Миннесоты заключается в разработке системы, которая может справляться с более низким качеством сигнала, возникающим из-за использования датчиков, которые используются вне тела, а вместо этого прикладываются к коже.Они смогли использовать комбинацию новых сенсорных технологий и технологий машинного обучения для получения сигналов от пользователя, исходящих из глубины мозга, но без «шума», который обычно сопровождает неинвазивные методы.
Возможно, это революционное открытие не так уж и далеко от того, чтобы изменить жизнь реальных пациентов — исследовательская группа намеревается в ближайшее время начать клинические испытания.
Люди с параличом управляют роботизированными руками с помощью интерфейса мозг-компьютер
Новое исследование, проведенное в журнале Nature, сообщает, что два человека с тетраплегией смогли дотянуться до объектов в трехмерном пространстве и схватить их с помощью роботизированных рук, которыми они управляли напрямую с помощью мозговой активности.Они использовали систему нейронного интерфейса BrainGate, исследовательское устройство, которое в настоящее время изучается в рамках исключения для исследовательских устройств. Одна участница использовала систему, чтобы подать себе кофе впервые после того, как ее парализовало почти 15 лет назад.
PROVIDENCE, RI [Университет Брауна] — 12 апреля 2011 года, почти через 15 лет после того, как она стала парализованной и не могла говорить, женщина управляла роботизированной рукой, думая о перемещении руки и руки, чтобы поднять бутылку кофе. ее рот и выпить.Это достижение является одним из достижений в области интерфейсов мозг-компьютер, восстановительной нейротехнологии и технологии вспомогательных роботов, описанных в выпуске журнала Nature от 17 мая, созданном совместно исследователями BrainGate2 из Департамента по делам ветеранов Университета Брауна, штат Массачусетс. Больница, Гарвардская медицинская школа и Немецкий аэрокосмический центр (DLR).
В исследовании приняли участие 58-летняя женщина («S3») и 66-летний мужчина («T2»). Каждый из них несколько лет назад был парализован из-за инсульта ствола мозга, который лишил их функционального контроля над своими конечностями.В исследовании участники использовали нейронную активность для непосредственного управления двумя разными роботизированными руками, одна из которых была разработана Институтом робототехники и мехатроники DLR, а другая — DEKA Research and Development Corp., для выполнения задач по достижению и захвату в широком трехмерном пространстве. Космос. Пилотное клиническое испытание BrainGate2 использует экспериментальную систему BrainGate, первоначально разработанную в Университете Брауна, в которой устройство размером с аспирин для ребенка с сеткой из 96 крошечных электродов имплантируется в моторную кору — часть мозга, которая участвует в произвольных движениях.Электроды расположены достаточно близко к отдельным нейронам, чтобы регистрировать нервную активность, связанную с предполагаемым движением. Внешний компьютер преобразует последовательность импульсов в популяции нейронов в команды для управления вспомогательными устройствами, такими как манипуляторы роботов DLR и DEKA, используемые в исследовании, опубликованном в журнале Nature.
Участники BrainGate ранее демонстрировали нейронное двумерное управление курсором на экране компьютера с помощью нейронных сетей и элементарное управление простыми роботизированными устройствами.
Исследование представляет собой первую демонстрацию и первый рецензируемый отчет людей с тетраплегией, использующих сигналы мозга для управления роботизированной рукой в трехмерном пространстве для выполнения задачи, обычно выполняемой их рукой. В частности, S3 и T2 управляли руками, чтобы достигать и захватывать цели из пены, которые были помещены перед ними с помощью гибких опор. Кроме того, S3 использовала робота DLR, чтобы взять бутылку кофе, поднести ее ко рту, дать команду опрокинуть ее, выпить через соломинку и вернуть бутылку на стол.Ее роботизированная рука с поддержкой BrainGate для управления во время питья требовала комбинации двухмерных движений по столешнице и команды «схватить», чтобы либо схватить и поднять, либо наклонить роботизированную руку.
«Наша цель в этом исследовании — разработать технологию, которая восстановит независимость и подвижность для людей с параличом или потерей конечностей», — сказал ведущий автор доктор Ли Хохберг, нейроинженер и невролог, работающий на приемах в Департаменте по делам ветеранов. Брауновский университет, Массачусетская больница общего профиля и Гарвард.Он является спонсором-исследователем пилотного клинического исследования BrainGate2. «Нам предстоит еще много работы, но обнадеживающий прогресс этого исследования демонстрируется не только в данных по охвату и усвоению информации, но и в еще большей степени в улыбке S3, когда она впервые подала себе кофе по собственному желанию. почти 15 лет ».
Leigh Hochberg Даже спустя почти 15 лет часть мозга, по существу «отключенная» от своей первоначальной цели в результате удара ствола мозга, все еще была способна управлять сложным, многомерным движением внешней руки.Частичное финансирование этой работы поступает от VA, который стремится улучшить жизнь раненых ветеранов. «Для VA большая честь сыграть роль в этой захватывающей и многообещающей области исследований», — сказал секретарь VA Эрик Шинсеки. «Сегодняшнее объявление представляет собой большой шаг вперед к улучшению качества жизни ветеранов и других людей, которые потеряли конечности или парализованы».
Хохберг добавляет, что даже спустя почти 15 лет часть мозга, по существу «отключенная» от своей первоначальной цели в результате удара ствола мозга, все еще была способна управлять сложным, многомерным движением внешней руки — в данном случае роботизированной конечности.Исследователи также отметили, что S3 смог выполнять эти задачи более чем через пять лет после имплантации исследуемой электродной матрицы BrainGate. Это устанавливает новый стандарт того, как долго имплантированные электроды интерфейса мозг-компьютер оставались жизнеспособными и обеспечивали полезные командные сигналы.
Джон Донохью, нейробиолог из Вирджинии и Брауна, который первым изобрел BrainGate более десяти лет назад и который является соавтором исследования, сказал, что в статье показано, как далеко продвинулась область интерфейсов мозг-компьютер со времени первых демонстраций компьютерного управления. с BrainGate.
«В этой статье сообщается о важном прогрессе, поскольку более чем на одном участнике четко продемонстрировано, что точное трехмерное нейронное управление манипуляторами роботов не только возможно, но и воспроизводимо», — сказал Донохью, руководитель Института исследований мозга Брауна. «Мы значительно приблизились к возвращению повседневных функций, таких как подача себе глотка кофе, которые обычно выполняются без усилий рукой и рукой, для людей, которые не могут двигать своими конечностями. Мы также рады видеть полезный контроль более чем через пять лет после имплантации массива BrainGate одному из наших участников.Эта работа является важным шагом на пути к реализации долгосрочной цели создания нейротехнологии, которая восстановит движение, контроль и независимость у людей с параличом или потерей конечностей ».
В исследовании роботы заменяли парализованную руку каждого участника. Роботизированные руки отреагировали на намерение участников двигаться, как они представляли, как дотягиваются до каждой пенной мишени. Рука робота схватила цель, когда участники представили сжатие руки. Поскольку диаметр мишеней был больше половины ширины отверстий рук робота, задача требовала от участников точного управления.(Видео этих действий доступны на сайте Nature .)
Джон Донохью «Мы значительно приблизились к возвращению к повседневным функциям, таким как подача себе глотка кофе, которые обычно легко выполняются рукой и ладонью, для людей, которые не могут двигать своими конечностями».В 158 испытаниях в течение четырех дней S3 смог коснуться цели в течение отведенного времени в 48,8% случаев с использованием руки и руки робота DLR и 69.В 2% случаев используется рука DEKA и кисть, имеющая более широкий охват. В 45 испытаниях с использованием руки DEKA T2 касался цели в 95,6% случаев. Из успешных касаний S3 захватил цель в 43,6% случаев с помощью руки DLR и 66,7% времени с помощью руки DEKA. Захват T2 был успешным в 62,2% случаев.
T2 провел сеанс в этом исследовании на четвертый день взаимодействия с рукой; предыдущие три сессии были сосредоточены на разработке системы.Используя глаза, чтобы обозначить каждую букву, он позже описал свой контроль над рукой: «Я просто представил, как движется моя собственная рука, и рука [DEKA] двигалась туда, куда я хотел».
В исследовании использовались два усовершенствованных робота-манипулятора: легкий робот DLR III с пятипалой рукой DLR и система DEKA Arm. DLR LWR-III, который предназначен для помощи в воссоздании таких действий, как человеческая рука и кисть, и для взаимодействия с людьми-пользователями, может быть ценным в качестве вспомогательного роботизированного устройства для людей с различными ограниченными возможностями.Патрик ван дер Смагт, руководитель отдела бионики и вспомогательной робототехники в DLR, директор лабораторий биомиметической робототехники и машинного обучения в DLR и Техническом университете Мюнхена, а также соавтор статьи сказал: «Это то, на что мы надеялись. эта рука. Мы хотели создать руку, которую можно было бы интуитивно использовать с различными формами контроля. Рукав уже используется в многочисленных исследовательских лабораториях по всему миру, которые используют его уникальные возможности взаимодействия и безопасности. Это убедительная демонстрация потенциальной полезности руки для человека с параличом.”
Компания DEKA Research and Development разработала систему DEKA Arm для людей с ампутированными конечностями при финансовой поддержке Агентства перспективных исследовательских проектов Министерства обороны США (DARPA). Дин Камен, основатель DEKA, сказал: «Одной из наших мечтаний о Luke Arm [так неформально известна система DEKA Arm] с момента ее создания было создание конечности, которая могла бы управляться не только внешними датчиками, но и другими устройствами. прямое мысленное управление. Мы рады этим результатам и продолжающимся исследованиям, проводимым группой из VA, Brown и MGH.«Исследование направлено на изучение того, как рукой DEKA можно управлять непосредственно из мозга, что потенциально позволяет людям с ампутированными конечностями более естественным образом контролировать эту протезную конечность.
В течение последних двух лет VA в сотрудничестве с ветеранами и военнослужащими, потерявшими руку, проводила исследование оптимизации протеза руки DEKA на нескольких объектах. Отзывы об исследовании помогают инженерам DEKA усовершенствовать конструкцию и функции искусственной руки. «Интерфейсы мозг-компьютер, такие как BrainGate, могут обеспечить беспрецедентный уровень функционального контроля над протезами рук будущего», — сказал Джоэл Куперсмит, M.Н., ВА главный научный сотрудник. «Это нововведение — лучший пример федерального сотрудничества».
Система нейронного интерфейса BrainGate2 Имплантированная матрица микроэлектродов, впервые использованная более десяти лет назад, обнаруживает сигналы мозга, которые могут быть переведены компьютером в машинные инструкции, что позволяет управлять роботизированными устройствами мысленно.Стори Лэндис, директор Национального института неврологических расстройств и инсульта, который частично профинансировал работу, отметил: «Эта технология стала возможной благодаря десятилетиям инвестиций и исследований того, как мозг контролирует движения.Приятно видеть, как технология эволюционирует из исследований в области базовой нейрофизиологии и переходит в клинические испытания, где она показывает большие перспективы для людей с травмами и расстройствами мозга ».
Помимо Хохберга, Донохью и ван дер Смагта, другими авторами статьи являются Даниэль Бахер, Беата Яросевич, Николас Массе, Джон Симерал, Йерн Фогель, Сами Хаддадин, Джи Лю и Сидней Кэш.
Дополнительные комментарии
Винсент Нг
Директор медицинского центра, Провиденс, Вирджиния, Медицинский центр
«VA находится в авангарде трансляционных исследований, которые улучшают качество жизни наших ветеранов, которые так многим пожертвовали ради нашей нации.Мы гордимся тем, что участвуем в этом захватывающем совместном исследовании ».
Сенатор США Шелдон Уайтхаус
«Я поздравляю Университет Брауна и Медицинский центр Провиденс, штат Вирджиния, с этим новаторским проектом, который может помочь значительно улучшить качество жизни инвалидов и парализованных американцев, в том числе многих ветеранов. Инновации, представленные в этом новом исследовании, подчеркивают ценность федеральной поддержки фундаментальных научных исследований ».
СШАПредставитель Дэвид Чичиллин
«Я поздравляю все сообщество Университета Брауна с успехами, достигнутыми в этом проекте. Я надеюсь, что при постоянном успехе это продвижение поможет улучшить качество жизни людей с ограниченными возможностями, особенно наших мужчин и женщин в военной форме ».
Дженнифер Френч
Исполнительный директор Neurotech Network
«Эта последняя разработка в исследованиях кортикального контроля может революционизировать то, как мы взаимодействуем с технологиями.В частности, возможности открывают новый уровень независимости для людей, живущих с тяжелым параличом. Простые задачи, такие как питье, еда или чистка зубов, невозможны для людей, живущих с тяжелым параличом. Возможность выполнять эти повседневные задачи может создать новый мир независимости для людей с тяжелыми формами инвалидности ».
Р. Джон Дэвенпорт
Заместитель директора Института мозговых исследований Университета Брауна
«Это захватывающее достижение команды BrainGate является примером удивительной науки, которая может возникнуть только при сотрудничестве исследователей из разных дисциплин.Институт работает над тем, чтобы объединить фундаментальные науки, инженерию и медицину среди более чем 100 преподавателей ».
Исследование BrainGate2 продолжает набор участников для участия в этом исследовании, и недавно к нему был добавлен Стэнфордский университет в качестве участника сотрудничества и центра клинических испытаний.
О сотрудничестве BrainGate
Этот прогресс является результатом продолжающихся совместных исследований BrainGate в Университете Брауна, Массачусетской больнице общего профиля, Медицинском центре Провиденс, штат Вирджиния; к сотрудничеству недавно присоединились исследователи из Стэнфордского университета.Исследовательская группа BrainGate сосредоточена на разработке и тестировании технологий, вдохновленных нейробиологией, для улучшения коммуникации, мобильности и независимости людей с неврологическими расстройствами, травмами или потерей конечностей.
Финансирование исследования и его проектов поступает от Службы исследований и разработок в области реабилитации, Управления исследований и разработок, Департамента по делам ветеранов США, Национальных институтов здравоохранения (некоторые гранты были полностью или частично профинансированы в рамках Закона о восстановлении и реинвестировании Америки. ), Национальный институт здоровья детей и развития человека Юнис Кеннеди Шрайвер / Национальный центр исследований в области медицинской реабилитации (HD53403, HD100018, HD063931), Национальный институт глухоты и других коммуникативных расстройств, Национальный институт неврологических расстройств и инсульта (NS025074) , Национальный институт биомедицинской визуализации и биоинженерии (EB007401), Благотворительный фонд Дорис Дьюк, Институт комплексных исследований фибрилляции предсердий и инсульта MGH-Deane, Фонд Кэти Самсон и Фонд Крейга Х.Фонд Нейлсена. Содержание не отражает официальную точку зрения Министерства по делам ветеранов или правительства США.
Имплантированная матрица микроэлектродов и соответствующее нейронное записывающее оборудование, использованные в исследовании BrainGate, произведены BlackRock Microsystems LLC (Солт-Лейк-Сити, Юта). Исследовательский прототип Gen2 DEKAarm был предоставлен DEKA Integrated Solutions Inc по контракту с Агентством перспективных оборонных исследовательских проектов (DARPA).
Пилотное клиническое испытание BrainGate ранее проводилось под руководством Cyberkinetics Neurotechnology Systems Inc.Фоксборо, штат Массачусетс, (CKI). CKI прекратила свою деятельность в 2009 году, до сбора данных, представленных в рукописи Nature. Клинические испытания системы нейронного интерфейса BrainGate2 в настоящее время проводятся в Массачусетской больнице общего профиля, Бостон, штат Массачусетс. Донохью — бывший главный научный сотрудник и бывший директор CKI; он держал акции и получал компенсацию. Хохберг получил исследовательскую поддержку от Массачусетской больницы общего профиля и реабилитационной больницы Сполдинг, которые, в свою очередь, получили поддержку клинических исследований от Cyberkinetics.
ВНИМАНИЕ: Исследовательское устройство. Ограничено федеральным законом для использования в расследованиях. Устройство изучается в среде IDE для обнаружения и передачи нейронных сигналов от коры головного мозга к системам связи с внешним питанием, системам контроля окружающей среды и вспомогательным устройствам людьми, которые не могут использовать свои руки из-за физических нарушений. Клинические испытания продолжаются; Таким образом, представленные результаты являются предварительными. Безопасность и эффективность устройства не установлены.
Контакты для прессы
Дэвид Оренштейн, Брауновский университет, [email protected], 401-527-2525
Марк Баллестерос, Департамент по делам ветеранов США, [email protected], 202-461-7559.
Майкл Моррисон, Массачусетская больница общего профиля, [email protected], 617-724-6425