Однофазный асинхронный электродвигатель
Дмитрий Левкин
- Однофазный электродвигатель с пусковой обмоткой
- Конструкция однофазного асинхронного двигателя
- Принцип работы однофазного двигателя
- Пуск однофазного двигателя
- Подключение однофазного двигателя
- Однофазный электродвигатель с экранированными полюсами
- Электродвигатель с асимметричным магнитопроводом статора
Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.
Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.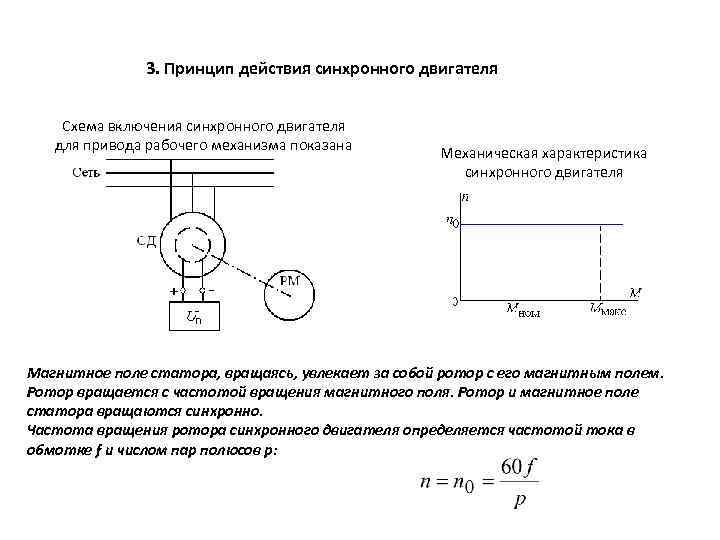
Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Остановить
Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
,
- где nпр
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Остановить
Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя
Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить
Остановить
Вращающееся магнитное поле пронизывающее ротор
Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
При этом частота тока в роторе пропорциональна скольжению, следовательно:
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f 2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,
скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц
Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = s пр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.
Если учесть, что коэффициент мощности невелик, то станет, ясно, почему М
С помощью одной фазы нельзя запустить ротор
Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение .
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов. Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.
Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки
Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.
Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.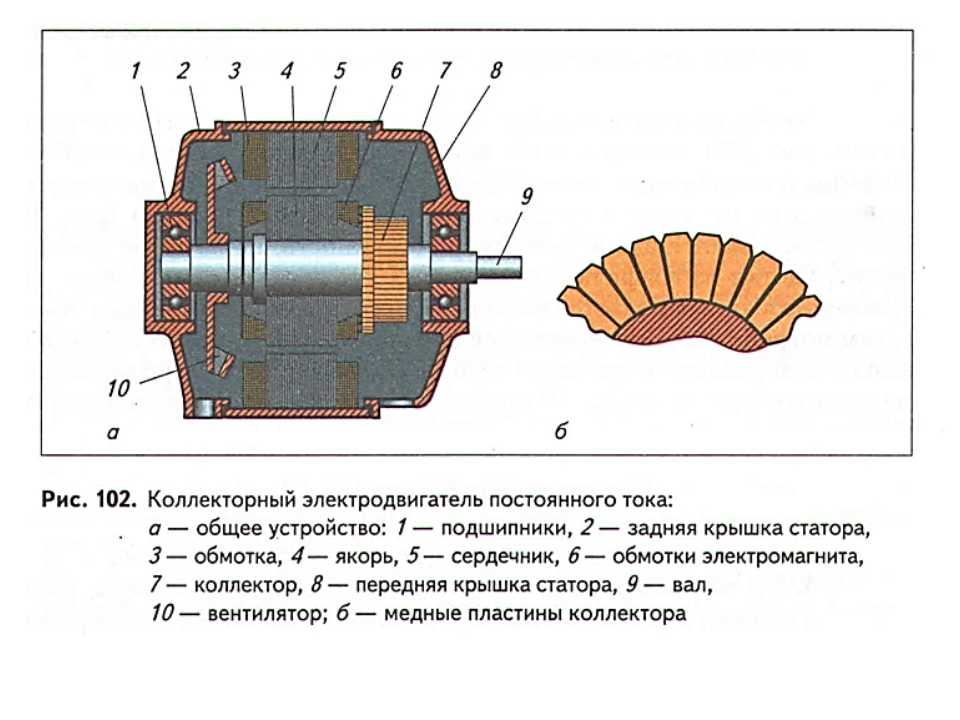
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk.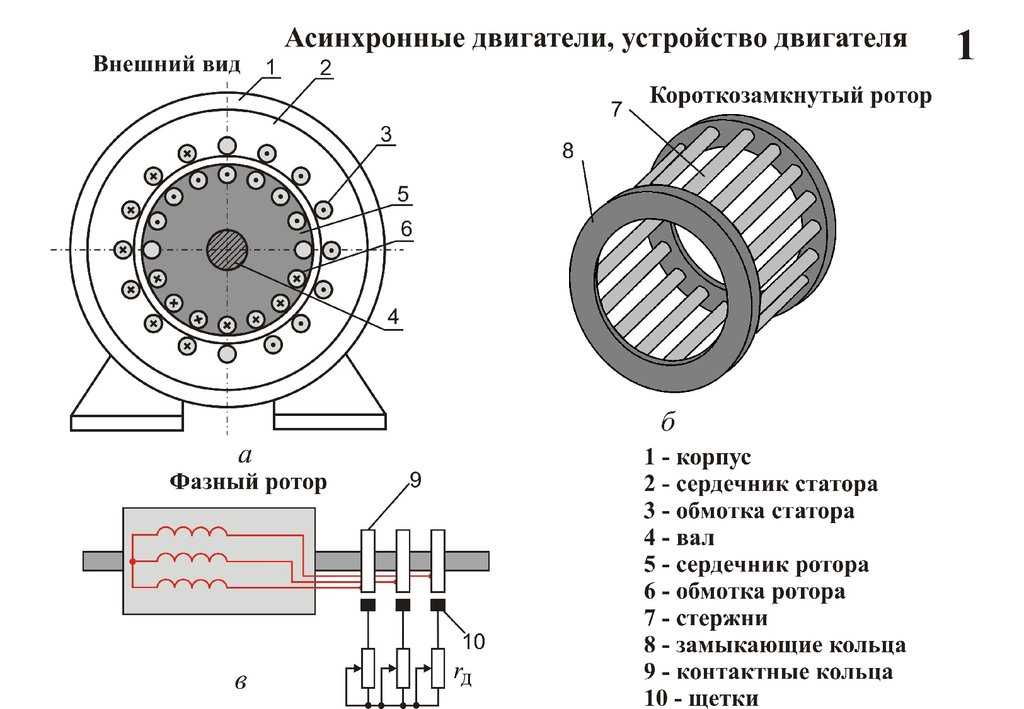 Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.
Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- М.
 М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987. - ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Библиографический список
История создания электродвигателя
Первые эксперименты с электромагнитными устройствами
Электромеханика является относительно молодой, по историческим меркам, отраслью науки и техники.
1800, Вольта
Итальянский физик, химик и физиолог, Алессандро Вольта, первый в мире создал химический источник тока.
1820, Эрстед
Датский ученый, физик, Ханс Кристиан Эрстед, обнаружил на опыте отклоняющее действие тока на магнитную стрелку.
1821, Фарадей
Первый электродвигатель Фарадея, 1821 г.
Британский физик-экспериментатор и химик, Майкл Фарадей, опубликовал трактат «О некоторых новых электромагнитных движениях и о теории магнетизма», где описал, как заставить намагниченную стрелку непрерывно вращаться вокруг одного из магнитных полюсов. Эта конструкция впервые реализовала непрерывное преобразование электрической энергии в механическую. Принято считать ее первым электродвигателем в истории.
Эта конструкция впервые реализовала непрерывное преобразование электрической энергии в механическую. Принято считать ее первым электродвигателем в истории.
1822, Ампер
Французский физик, Андре Мари Ампер, открыл магнитный эффект соленоида (катушки с током), откуда следовала идея эквивалентности соленоида постоянному магниту. Среди прочего Ампер предложил использовать железный сердечник, помещенный внутрь соленоида, для усиления магнитного поля. В 1820 году им был открыт закон Ампера.
1822, Барлоу
Английский физик и математик, Питер Барлоу, изобрел колесо Барлоу, по сути, униполярный электродвигатель.
1825, Араго
Французский физик и астроном, Доминик Франсуа Жан Араго, опубликовал опыт показывающий, что вращающийся медный диск заставляет вращаться магнитную стрелку, подвешенную над ним.
1825, Стёрджен
Британский физик, электротехник и изобретатель, Уильям Стёрджен, в 1825 изготовил первый электромагнит, который представлял из себя согнутый стержень из мягкого железа с обмоткой из толстой медной проволоки.
Вращающееся устройство Йедлика, 1827/28 гг.
1827, Йедлик
Венгерский физик и электротехник, Аньош Иштван Йедлик, изобрел первую в мире динамо-машину (генератор постоянного тока), однако практически не объявлял о своем изобретении до конца 1850-х годов.
1831, Фарадей
Английский физик, Майкл Фарадей, открыл электромагнитную индукцию, то есть явление возникновения электрического тока в замкнутом контуре при изменении магнитного потока, проходящего через него. Формулировка закона электромагнитной индукции.
1831, Генри
Американский физик, Джозеф Генри, независимо от Фарадея обнаружил взаимоиндукцию, но Фарадей раньше опубликовал свои результаты.
1832, Пикси
Генератор постоянного тока Пикси
Француз, Ипполит Пикси, сконструировал первый генератор переменного тока. Устройство состояло из двух катушек индуктивности с железным сердечником напротив которых располагался вращающийся магнит подковообразной формы, который приводился в движение вращением рычага. Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.
Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.
Электродвигатель Стёрджена
Strurgejn’s Annals of Electricity, 1836/37, vol. 1
1833, Стёрджен
Британский физик, Уильям Стёрджен, публично продемонстрировал электродвигатель на постоянном токе в Марте 1833 года в Аделаидской галерее практической науки в Лондоне. Данное изобретение считается первым электродвигателем, который можно было использовать.
1833, Ленц
В начале в электромеханике разграничивали магнито-электрические машины (электрические генераторы) и электро-магнитные машины (электрические двигатели). Российский физик (немецкого происхождения), Эмилий Христианович Ленц, опубликовал статью о законе взаимности магнито-электрических явлений, то есть о взаимозаменяемости электрического двигателя и генератора.
Первые реальные электрические двигатели
Май 1834, Якоби
Первый вращающийся электродвигатель. Якоби, 1834
Немецкий и русский физик, академик Императорской Санкт-Петербургской Академии Наук, Борис Семенович (Мориц Герман фон) Якоби, изобрел первый в мире электродвигатель с непосредственным вращением рабочего вала.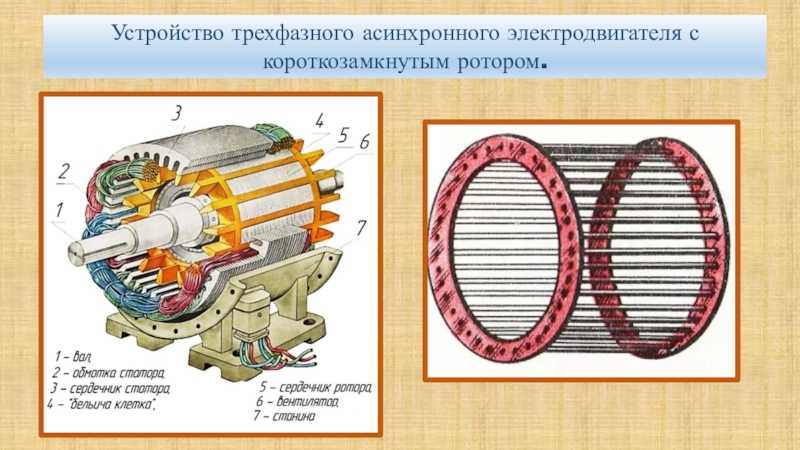 Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
1836 — 1837, Дэвенпорт
Проводя эксперименты с магнитами, американский кузнец и изобретатель, Томас Дэвенпорт, создает свой первый электромотор в июле 1834 года. В декабре этого же года он впервые продемонстрировал свое изобретение. В 1837 году Дэвенпорт получил первый патент (патент США №132) на электрическую машину.
1839, Якоби
Используя электродвигатель питающийся от 69 гальванических элементов Грове и развивающий 1 лошадиную силу, в 1839 г. Якоби построил лодку способную двигаться с 14 пассажирами по Неве против течения. Это было первое практическое применение электродвигателя.
1837 — 1842, Дэвидсон
Шотландский изобретатель, Роберт Дэвидсон, занимался разработкой электродвигателя с 1837 года. Он сделал несколько приводов для токарного станка и моделей транспортного средства.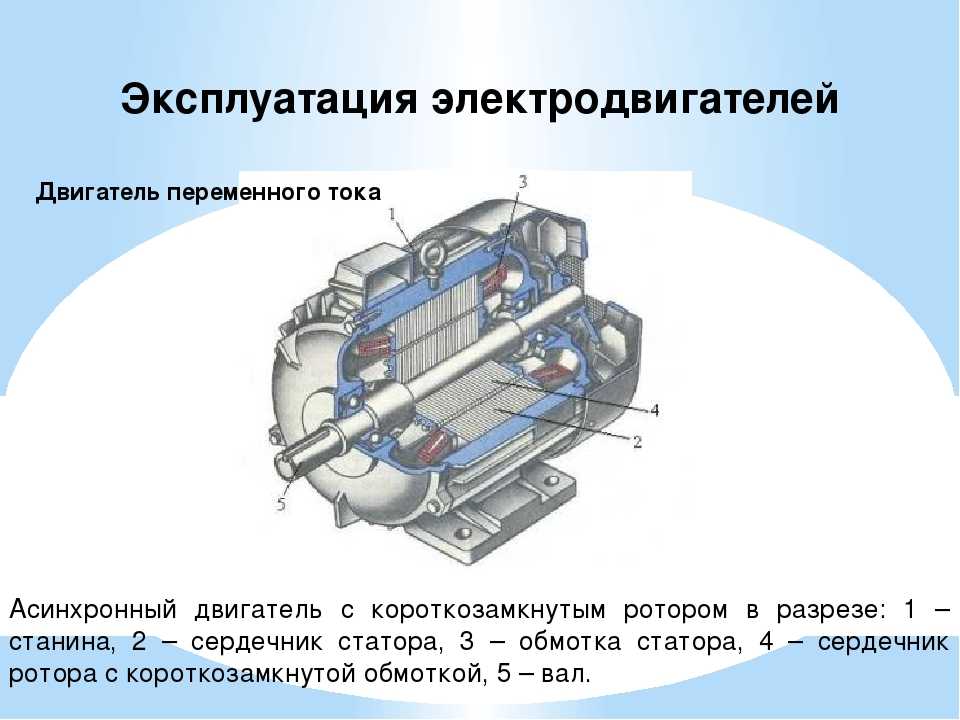 Дэвидсон изобрел первый электрический локомотив.
Дэвидсон изобрел первый электрический локомотив.
1856, Сименс
Немецкий инженер, изобретатель, ученый, промышленник, основатель фирмы Siemens, Вернер фон Сименс изобрел электрический генератор с двойным T-образным якорем. Он первый разместил обмотки в пазах.
1861-1864, Максвелл
Британский физик, математик и механик, Джеймс Клерк Максвелл, обобщил знания об электромагнетизме в четырех фундаментальных уравнениях. Вместе с выражением для силы Лоренца уравнения Максвелла образуют полную систему уравнений классической электродинамики.
1871-1873, Грамм
Бельгийский изобретатель, Зеноб Теофил Грамм, устранил недостаток электрических машин с двух-Т-образным якорем Сименса, который заключался в сильных пульсациях вырабатываемого тока и быстром перегреве. Грамм предложил конструкцию генератора с самовозбуждением, который имел кольцевой якорь.
1885, Феррарис
Итальянский физик и инженер, Галилео Феррарис, изобрел первый двухфазный асинхронный электродвигатель.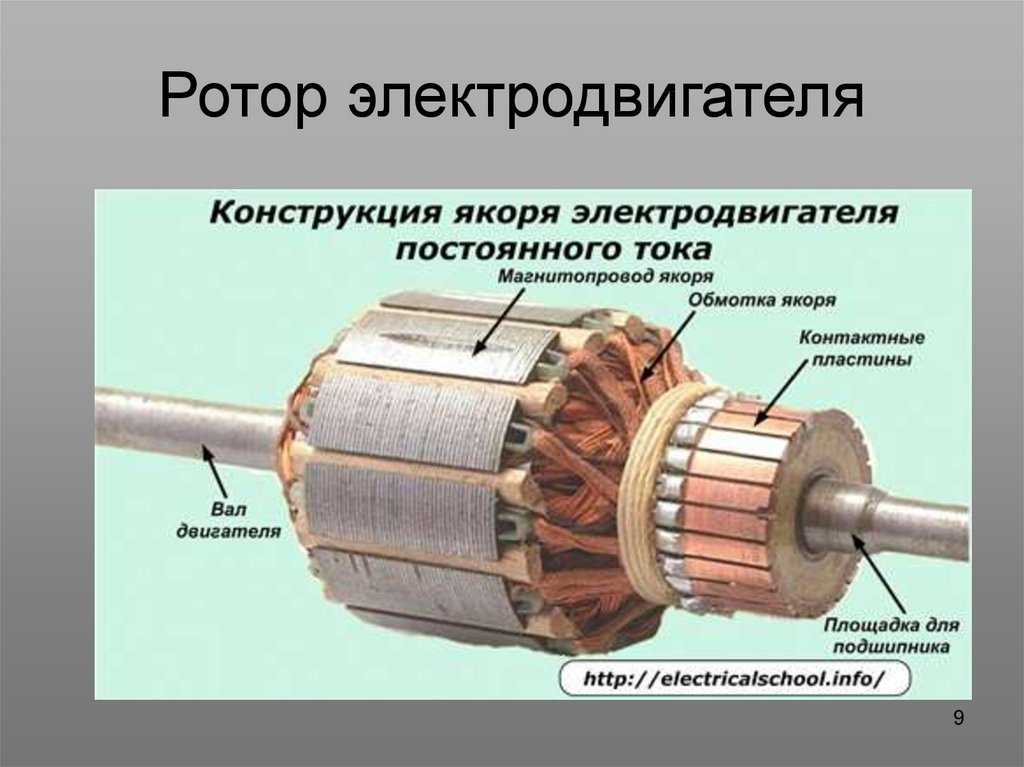 Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
1887, Тесла
Американец сербского происхождения, изобретатель, Никола Тесла, работая независимо от Феррариса, изобрел и запатентовал двухфазный асинхронный электродвигатель с явно выраженными полюсами статора (сосредоточенными обмотками). Тесла ошибачно считал что двухфазная система токов оптимальна с экономической точки зрения среди всех многофазных систем.
1889-1891, Доливо-Добровольский
Русский электротехник польского происхождения, Михаил Осипович Доливо-Добровольский, прочитав доклад Феррариса о вращающемся магнитном поле изобрел ротор в виде «беличьей клетки». Дальнейшая работа в этом направлении привела к разработке трехфазной системы переменных токов и трехфазного асинхронного электродвигателя, получившего широкое применение в промышленности и практически не изменившегося до нашего времени.
Широкое внедрение электромеханических устройств в России начинается после Октябрьской революции 1917 г., когда электрификация всей страны стала основой технической политики нового государства. Можно сказать, что XX век стал веком становления и широкого распространения электромеханики.
Выбор между двухфазной и трехфазной системой
Доливо-Добровольский справедливо считал, что увеличение числа фаз в двигателе улучшает распределение намагничивающей силы по окружности статора. Переход к трехфазной системы от двухфазной уже дает большой выигрыш в этом отношении. Дальнейшее увеличение числа фаз нецелесообразно, так как приводит к значительному увеличению расходов металла на провода.
Для Теслы же казалось очевидным, что чем меньше число фаз, тем меньше требуется проводов, и следовательно тем дешевле устройство электропередачи. При этом двухфазная система передачи требовала применения четырех проводов, что представлялось не желательным в сравнении с двух проводными системами постоянного или однофазного переменного токов. Поэтому Тесла предлагал применять трех проводную линию для двухфазной системы, делая один провод общим. Но это не сильно уменьшало количество затрачиваемого на систему металла, так как общий провод должен был быть большего сечения.
Поэтому Тесла предлагал применять трех проводную линию для двухфазной системы, делая один провод общим. Но это не сильно уменьшало количество затрачиваемого на систему металла, так как общий провод должен был быть большего сечения.
Таким образом трехфазная система токов предложенная Доливо-Добровольским была оптимальной для передачи энергии. Она практически сразу нашла широкое применение в промышленности и до наших дней является основной системой передачи электрической энергии во всем мире.
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
- Принцип преобразования энергии
- Виды двигателей и их устройство
- Асинхронные
- Синхронные
- История изобретения
- Подключение к однофазным и трехфазным источникам питания
- Преимущества и недостатки электрических двигателей переменного тока
- Применение
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.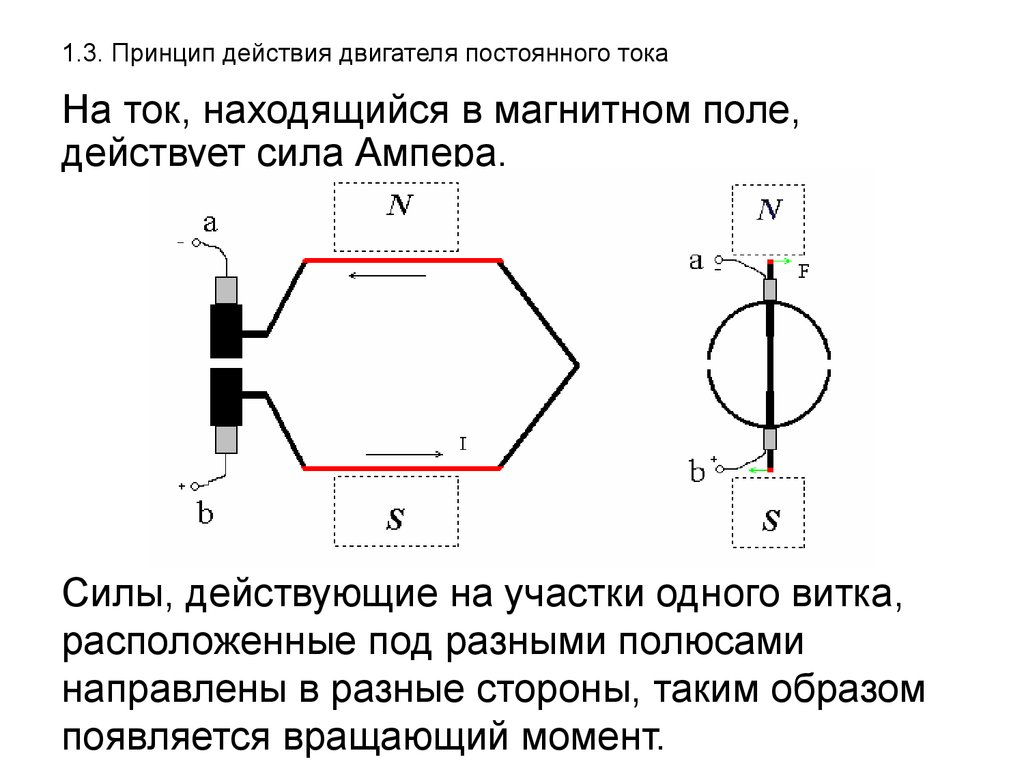
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
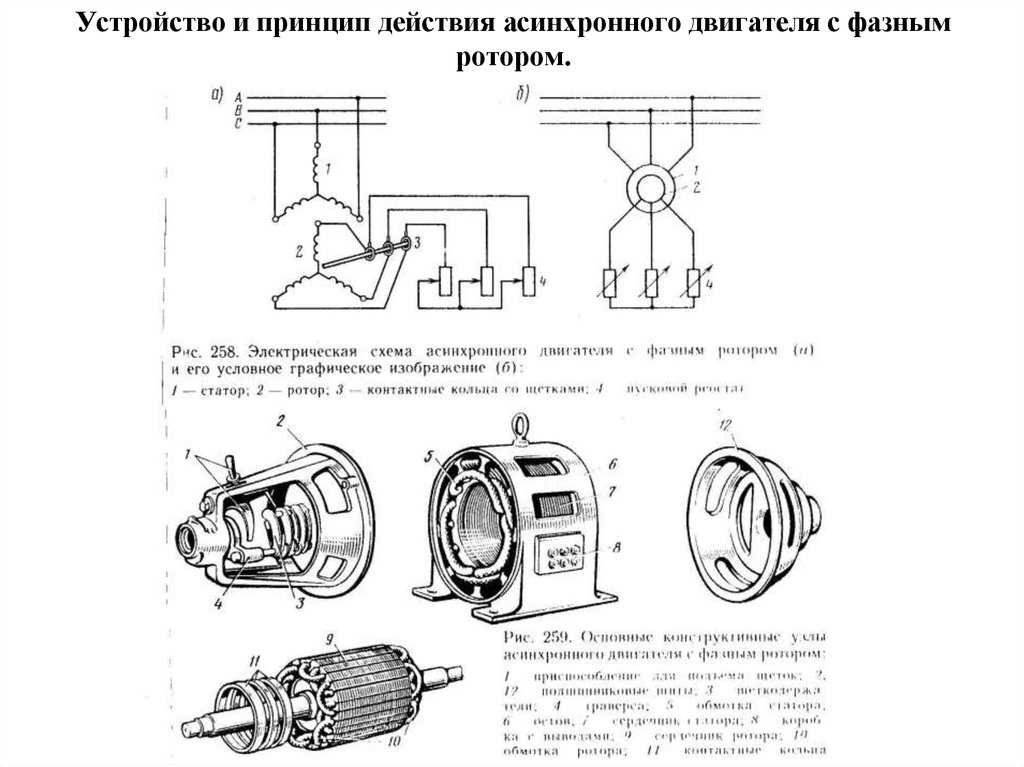
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам.
 Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году.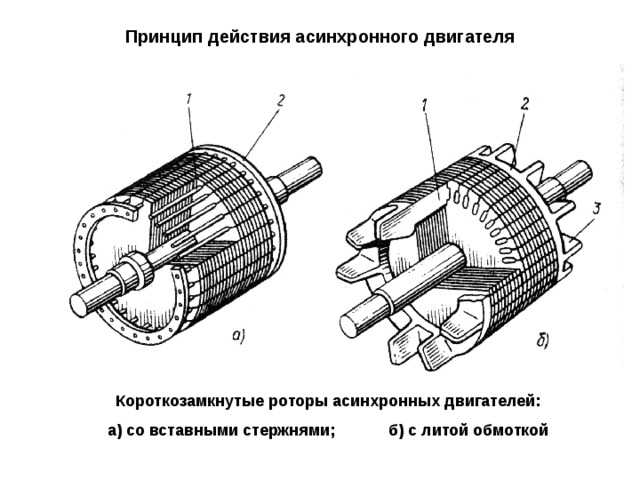 Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.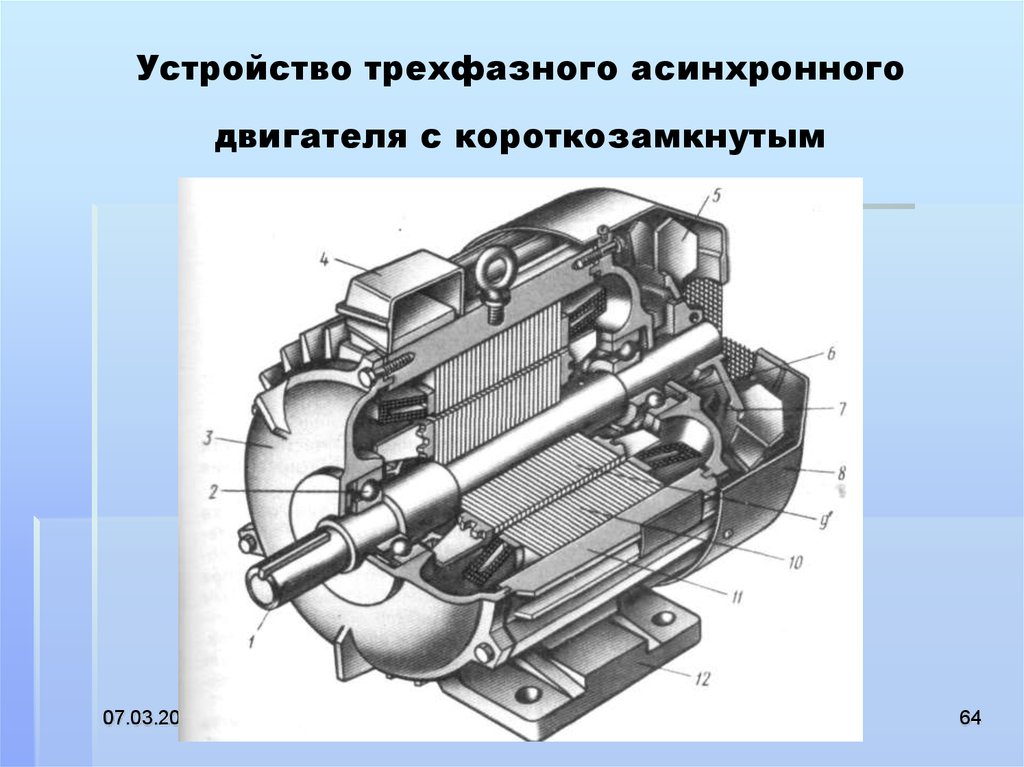
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В.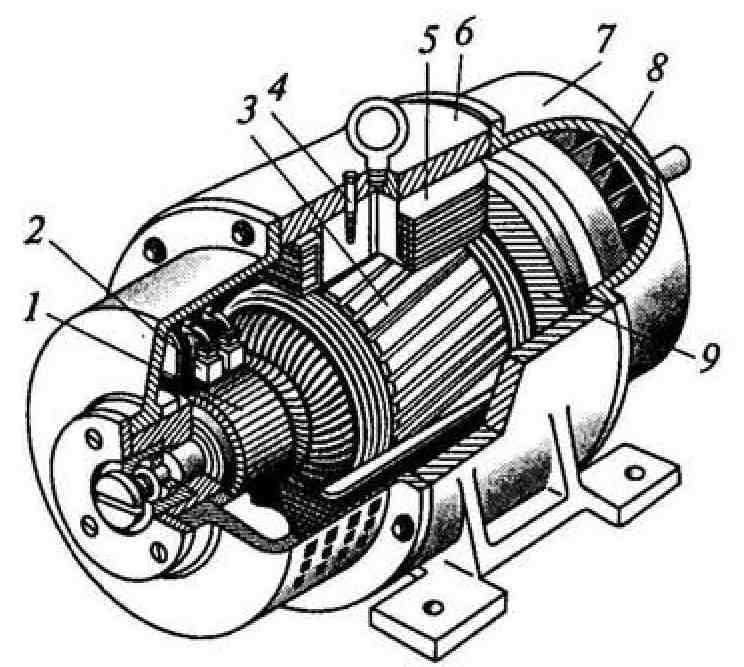 В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Устройство и принцип работы стартера
Стартер представляет собой электродвигатель постоянного тока, который используют для пуска двигателя внутреннего сгорания установленного на дизельной электростанции или любой другой технике.
Стартер представляет собой электродвигатель постоянного тока, который используют для пуска двигателя внутреннего сгорания установленного на дизельной электростанции или любой другой технике.
При запуске коленчатый вал двигателя раскручивается стартером, питающимся от аккумуляторной батареи, обеспечивая вспышку рабочей смеси в одном из цилиндров.
Мощность стартера зависит от момента сопротивления проворачиванию коленчатого вала, который пропорционален рабочему объему двигателя, и минимальной частоты вращения коленчатого вала, при которой в цилиндрах начинаются вспышки.
Минимальная пусковая частота карбюраторных бензиновых двигателей, установленных на электростанцию — 40-50 об/мин, а дизельных — 100-250 об/мин.
Обладающему небольшой массой и габаритами стартеру приходится вращать массивный маховик и приводить в движение всю кривошипно-шатунную группу двигателя. Чтобы провернуть коленчатый вал холодного двигателя, ему необходим большой пусковой ток, который выдаётся аккумулятором, стремительно теряющим максимальный ток и ёмкость с понижением температуры. С использованием слишком вязкого масла это делает запуск на морозе невозможным или существенно осложняет его.
С использованием слишком вязкого масла это делает запуск на морозе невозможным или существенно осложняет его.
Электрический стартер, устанавливаемый на большинство электростанций, представляет из себя электродвигатель постоянного тока со смешанным возбуждением, с электромагнитным включением шестерни привода и дистанционным управлением. При этом он имеет особую конструкцию с четырьмя щётками (две положительные и две отрицательные), которая позволяет уменьшить сопротивление ротора и увеличить мощность электродвигателя.
Электрическое подключение стартера:
-
аккумуляторная батарея (АБ)
-
предохранитель
-
замок зажигания
-
реле стартера
Силовой «+» толстый красный провод- постоянно подключен к верхнему контактному болту на рис. «30». Массой «-» является непосредственно корпус стартера. Провод управления работой стартера (значительно тоньше силового) подключается через наконечник или гайку к обмотке тягового реле на рис. «50».
«30». Массой «-» является непосредственно корпус стартера. Провод управления работой стартера (значительно тоньше силового) подключается через наконечник или гайку к обмотке тягового реле на рис. «50».
Принцип работы стартера
1 — корпус стартера;
2 — вал якоря стартера;
3 — шестерня привода с муфтой свободного хода;
4 — рычаг привода шестерни;
5 — обмотки тягового реле;
6 — якорь тягового реле;
7 — контактная пластина;
8 — контактные болты;
9 — обмотки стартера;
10 — якорь стартера;
11 — коленчатый вал двигателя;
12 — зубчатый венец маховика
Принцип работы стартера в двух словах можно описать так:
При нажатии на исполнительное устройство (в качестве которого может выступать: кнопка, ключ зажигания…) питание от АБ через реле стартера подается на обмотку тягового реле 5. Якорь тягового реле под воздействием силы электромагнитной индукции смещается, замыкая контактной пластиной «пяткой»7 силовые контакты 8, одновременно перемещая через рычаг 4 шестерню 3 (бендикс) и переводя ее в зацепление с маховиком 12 двигателя. При замыкании контактов 8 питание от АБ поступает на обмотку стартера 9, приводя во вращение якорь и соответственно шестерню вошедшую в зацепление с венцом маховика, которая проворачивает коленчатый вал двигателя через маховик, запуская двигатель. После начала работы двигателя, (что определяется либо частотой вращения двигателя, либо временем задержки вращения стартера) питания на реле стартера снимается и механизм привода выводит шестерню стартера из зацепления с зубчатым венцом маховика.
Якорь тягового реле под воздействием силы электромагнитной индукции смещается, замыкая контактной пластиной «пяткой»7 силовые контакты 8, одновременно перемещая через рычаг 4 шестерню 3 (бендикс) и переводя ее в зацепление с маховиком 12 двигателя. При замыкании контактов 8 питание от АБ поступает на обмотку стартера 9, приводя во вращение якорь и соответственно шестерню вошедшую в зацепление с венцом маховика, которая проворачивает коленчатый вал двигателя через маховик, запуская двигатель. После начала работы двигателя, (что определяется либо частотой вращения двигателя, либо временем задержки вращения стартера) питания на реле стартера снимается и механизм привода выводит шестерню стартера из зацепления с зубчатым венцом маховика.
Варианты исполнения
1 – шестерня;
2 – муфта;
3 – рычаг;
4, 9 – крышки;
5 – реле;
6 – коллектор;
7 – щетки;
8 – втулка;
10 – болт;
11 – корпус;
12 – полюс;
13 – якорь;
14 – кольцо;
15, 16 – обоймы;
17 – плунжер;
18 – ролик
В стальном корпусе 11 стартера (схема 1) закреплены четыре полюса 12 с обмотками возбуждения, три из которых соединены с обмоткой якоря 13 последовательно и одна параллельно.
Вал якоря стартера вращается в двух втулках 8 из спеченных материалов, пропитанных маслом. Втулка заднего конца вала запрессована в крышку 9, а втулка переднего конца вала – в картере сцепления. На переднем конце вала якоря находится привод стартера, включающий в себя муфту свободного хода 2 и шестерню 1 привода, которые при включении стартера перемещаются по шлицам вала. Крышки стартера отлиты из алюминиевого сплава.
На передней крышке 4 закреплено тяговое реле 5, связанное через пластмассовый рычаг 3 и кольцо 14 с приводом стартера. Реле обеспечивает ввод шестерни в зацепление с венцом маховика и подключение электрической цепи обмоток стартера к аккумуляторной батарее при пуске двигателя.
На задней крышке 9 установлены щеткодержатели с четырьмя медно-графитовыми щетками 7. Щетки прижимаются пружинами к торцовому коллектору 6 якоря. Торцовый коллектор выполнен в виде пластмассового диска, в котором залиты медные контактные пластины.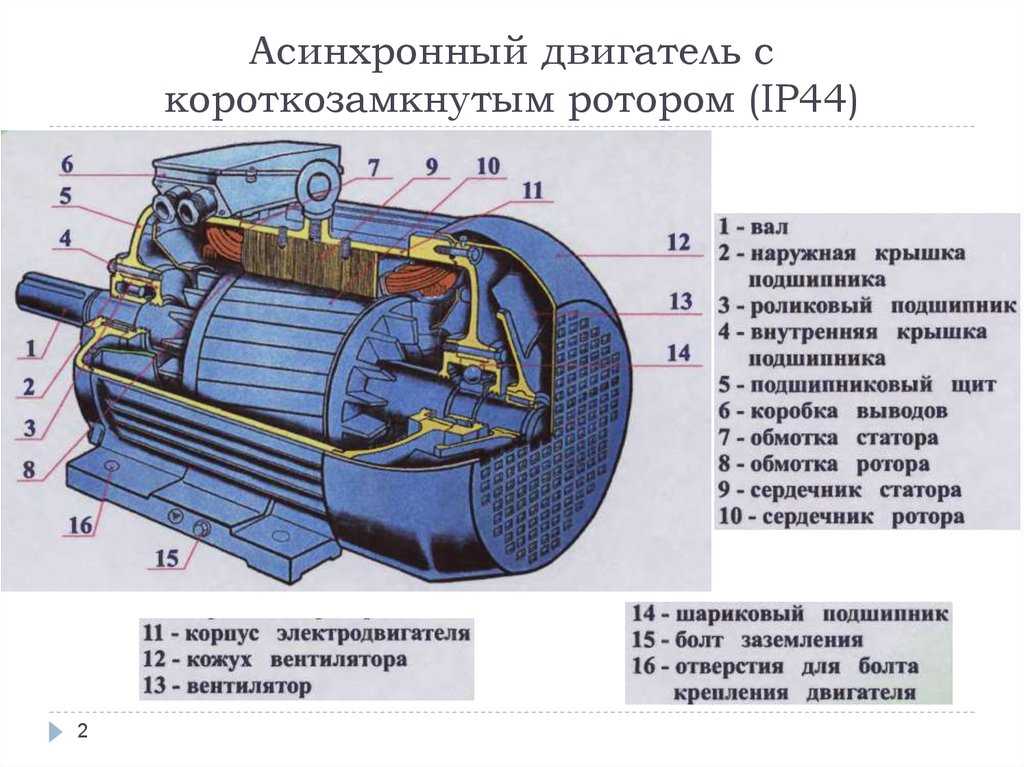 Такой коллектор уменьшает длину стартера, снижает его массу и способствует более стабильной и длительной работе щеточных контактов. Крышки и корпус стартера стянуты между собой двумя болтами 10.
Такой коллектор уменьшает длину стартера, снижает его массу и способствует более стабильной и длительной работе щеточных контактов. Крышки и корпус стартера стянуты между собой двумя болтами 10.
Муфта свободного хода 2 состоит из наружной 16 и внутренней 15 обойм. Внутренняя обойма объединена с шестерней привода стартера. Наружная обойма объединена со ступицей, которая через спиральные шлицы соединена с валом якоря. Спиральные шлицы обеспечивают поворот муфты при ее перемещении вдоль вала, что облегчает ввод в зацепление зубьев шестерни 1 стартера и венца маховика.
В наружной обойме имеются три паза переменной ширины, в которых размещены ролики 18 и поджимные плунжеры 17 с пружинами. Ролики постоянно отжимаются в суженную часть вырезов, заклинивая наружную и внутреннюю обойм. При пуске двигателя заклинивание обойм усиливается, а после пуска обоймы расклиниваются, так как ролики, преодолевая сопротивление пружин поджимных плунжеров, выкатываются в расширенную часть пазов наружной обоймы муфты.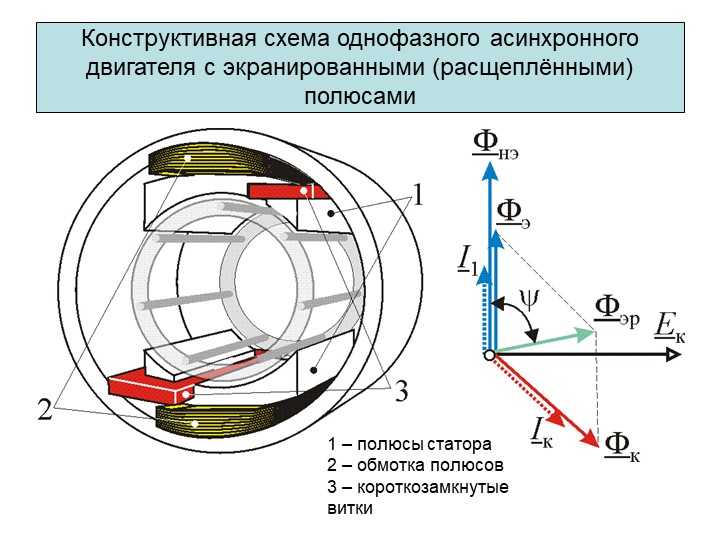
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…
Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
Рис.
 3 Рамка
3 РамкаЗдесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.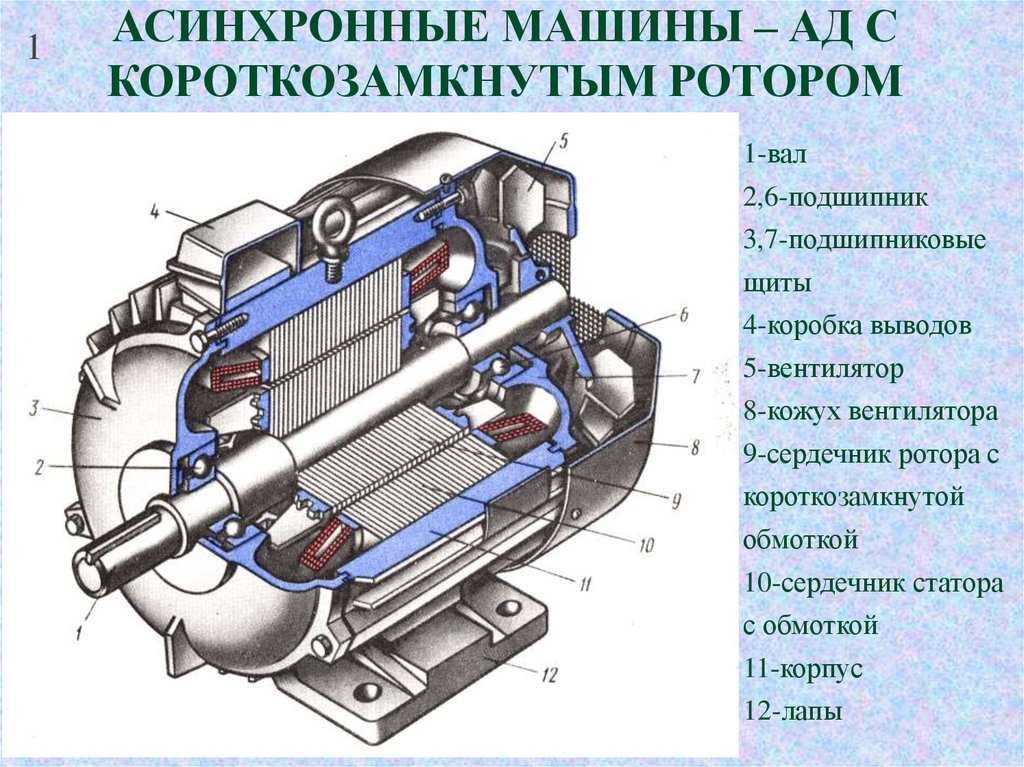 е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Электродвигатель.
 Виды и применение. Работа и особенности
Виды и применение. Работа и особенностиУстройство под названием «электродвигатель» предназначается для преобразования энергии э/м поля в ее механическую (вращательную) разновидность. Такие агрегаты широко применяются во многих областях хозяйственной деятельности человека. Они востребованы в механизмах, где вращательное движение вала двигателя позволяет производить полезную работу.
В основу работы электродвигателей различного типа заложен принцип взаимодействия магнитных полей, открытый М. Фарадеем в 1821 году. Коротко его суть можно сформулировать следующим образом:
- При протекании тока через провод (обмотку) вокруг него появляется собственное магнитное поле.
- Если такой провод находится рядом с постоянным магнитом – он начнет отклоняться в ту или другую сторону.
- Величина и вектор отклонения зависят от направления протекания потока электронов и его интенсивности.
- Если пропускать постоянный ток через рамку, расположенную в промежутке между двумя полюсами магнита – она начнет вращаться.
- Направление вращения зависит от того, в какую сторону движутся заряженные частицы.
Это открытие легло в основу разработки известного всем двигателя постоянного тока.
Представленный схематично электродвигатель состоит из следующих основных частей:
- Двухполюсный постоянный магнит.
- Вращающаяся рамка, по которой пропускается ток.
- Токосъемные графитовые щетки
Для полноценной работы такого устройства потребуется отдельный источник энергии.
Вращение рамочной конструкции в поле постоянного магнита объясняется отталкиванием однополярных полюсов и притягиванием противоположных. В реальном электродвигателе вместо одиночной рамки используется так называемый «ротор» или «якорь», состоящий из множества витков проводников выбранного диаметра.
На основании того же открытия была разработана еще одна разновидность преобразователя электроэнергии во вращательное движение. Это электродвигатель, в котором в качестве магнитов используются катушки с протекающим по ним трехфазным током.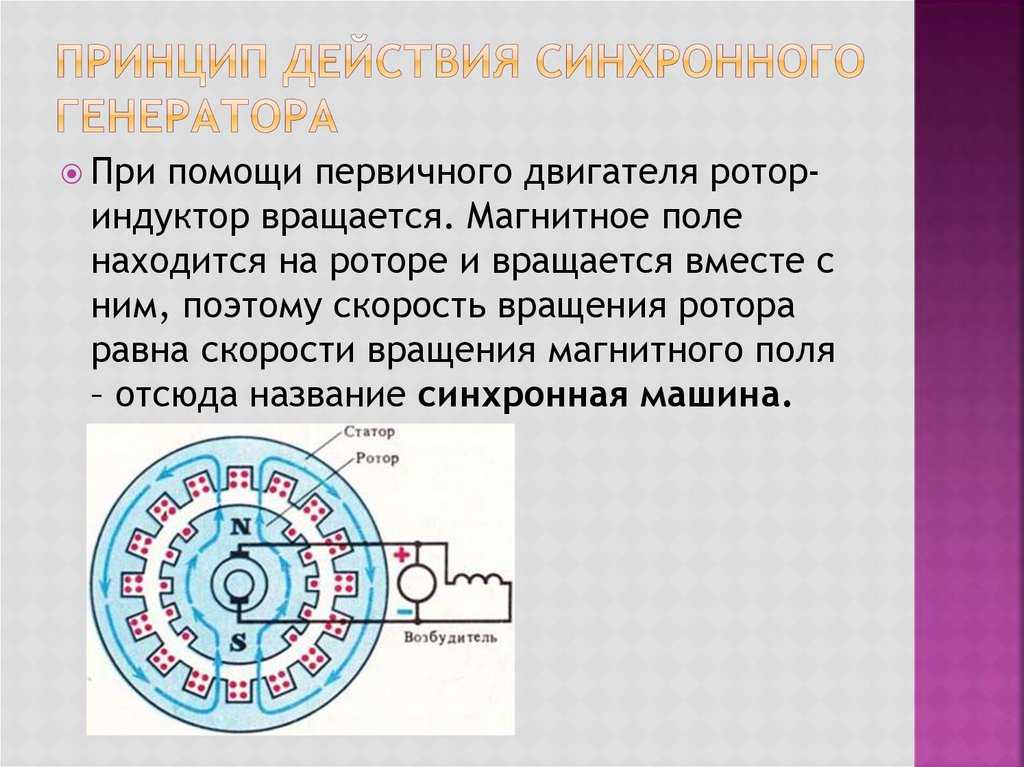 Принцип его работы точно такой же, что и у описанной выше модели, но конструкция и способ преобразования несколько иные.
Принцип его работы точно такой же, что и у описанной выше модели, но конструкция и способ преобразования несколько иные.
В устройствах переменного тока ротор, расположенный между многополюсными катушками, под воздействием изменяющегося по величине и направлению э/м поля начинает вращаться. Чаще всего он изготавливается в виде цилиндра, состоящего из множества короткозамкнутых витков и внешне напоминающего клетку белки. Применение ротора, называемого «беличьим колесом», позволяет повысить КПД электродвигателя и улучшить его эксплуатационные показатели.
Разновидности электродвигателейЭлектродвигатели классифицируются по следующим основным признакам:
- Вид электрической энергии, используемой для формирования э/м поля в катушках.
- Особенности взаимодействия неподвижного статора и вращающегося ротора.
- Способ подачи напряжения на подвижный узел.
В особую группу выделяются шаговые серводвигатели, ротор которых вращается не непрерывно, а дискретно (пошагово).
Согласно первому признаку все известные устройства делятся на двигатели постоянного и переменного тока. Каждый из них имеет свои плюсы и минусы и востребован в определенных условиях эксплуатации.
По способу взаимодействия э/м полей статора и ротора электродвигатели подразделяются на асинхронные и синхронные. Первые отличаются от вторых тем, что скорость вращения ротора у них несколько меньше того же показателя для э/м поля статора. Он слегка отстает от вращающегося э/м потока и как бы «скользит» по нему. В синхронных устройствах такого отставания нет.
Асинхронный электродвигательОсновными узлами являются неподвижный статор в виде медных обмоток и вращающийся ротор, вал которого передает механический импульс на приводной механизм. Катушки намотаны на сердечниках из специальной электротехнической стали, позволяющей получить нужные рабочие характеристики.
Они выполнены в виде трех групп одинаковых полюсов, разнесенных по окружности одна относительно другой на 120 градусов. На каждую такую группу от трехфазной сети подается напряжение соответствующей фазы, смещенное относительно двух других на ту же треть периода (360/3). Благодаря этому электромагнитное поле катушек перемещается по окружности статора с сетевой частотой 50 герц. При этом оно взаимодействует с э/м полем ротора, который начинает вращаться с той же радианной скоростью.
На каждую такую группу от трехфазной сети подается напряжение соответствующей фазы, смещенное относительно двух других на ту же треть периода (360/3). Благодаря этому электромагнитное поле катушек перемещается по окружности статора с сетевой частотой 50 герц. При этом оно взаимодействует с э/м полем ротора, который начинает вращаться с той же радианной скоростью.
Помимо этих двух частей, асинхронный электродвигатель содержит следующие обязательные узлы:
- Клеммная коробка.
- Вал.
- Статор.
- Ротор.
- Корпус.
- Вентилятор.
- Комплект подшипников скольжения.
Для охлаждения трущихся частей на корпус агрегата устанавливается вентилятор, работающий от того же трехфазного источника тока.
Асинхронные двигатели отличаются относительной дешевизной и высокой надежностью функционирования.
К недостаткам традиционно относят:
- Непостоянство скорости вращения вала.
- Сложность управления этим параметром.

- Его ограниченность по величине (не более 3000 оборотов в минуту).
Для устранения всех перечисленных недостатков был разработан синхронный электродвигатель.
Синхронные агрегатыЭтот тип электродвигателей примечателен тем, что ротор у них вращается синхронно с создаваемым статором э/м полем. В корпусе такого изделия также имеются полюса с обмотками (3). Подвижный ротор, называемый в этом случае «якорем», тоже состоит из обмоток, намотанных в пазах основания из электротехнической стали.
Выводы его катушек припаиваются к секторам коллектора 5, выполненного в виде токосъемного кольца. А на них в свою очередь подается рабочее напряжение, для чего используются графитовые щетки 4. За счет подачи напряжения на коллектор якоря в его обмотках формируется свое собственное э/м поле.
Вращающий момент в синхронных двигателях создается в результате взаимодействия между электромагнитными потоками ротора (якоря) и возбуждающей обмотки.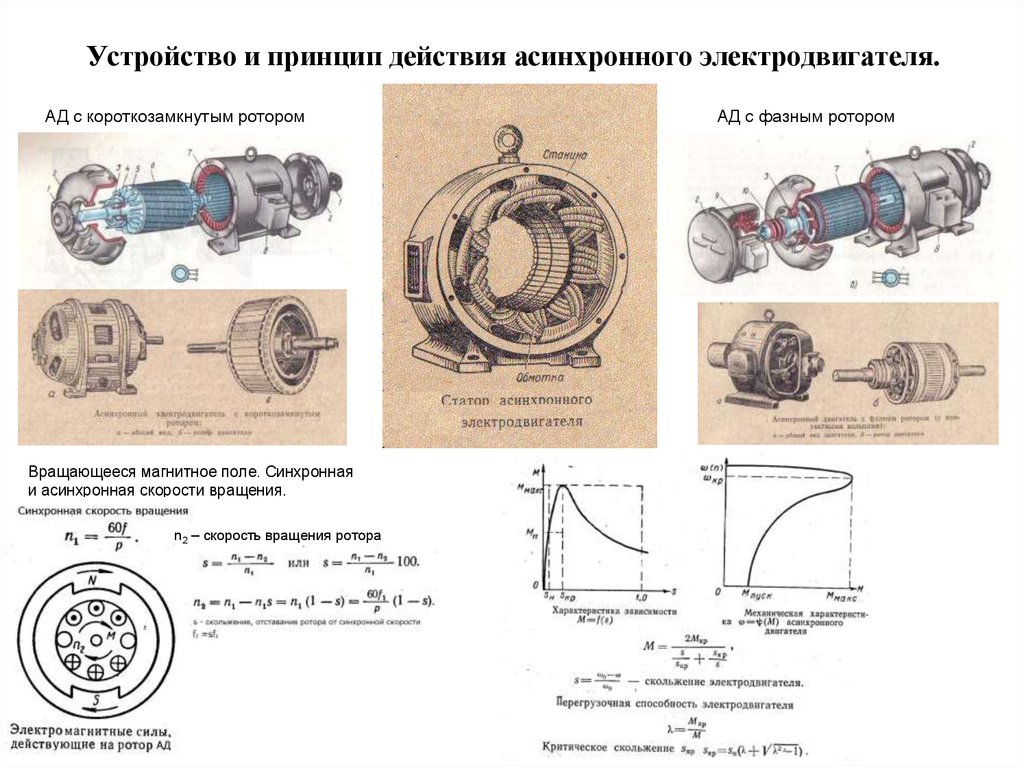 Регулировать скорость вращения вала можно путем изменения величины прикладываемого к щеткам напряжения. В большинстве бытовых приборов, работающих по этому принципу, в качестве регулирующего органа чаще всего используется переменное сопротивление или проволочный реостат.
Регулировать скорость вращения вала можно путем изменения величины прикладываемого к щеткам напряжения. В большинстве бытовых приборов, работающих по этому принципу, в качестве регулирующего органа чаще всего используется переменное сопротивление или проволочный реостат.
По способу подачи питания на вращающийся ротор все известные двигатели подразделяются на агрегаты с коллекторным подключением и обходящиеся без него. Вторая разновидность так и называется – бесколлекторные моторы. Они характеризуются высокой надежностью и привлекают пользователя низким уровнем вредных электромагнитных излучений.
К их достоинствам также относят:
- Отсутствие искрообразования, позволяющее применять эти устройства на особо опасных производствах.
- Пониженная шумность.
- Длительные сроки эксплуатации.
- Простота обслуживания.
Такие электродвигатели востребованы во взрывоопасных производствах, связанных с переработкой и перекачкой нефти и газа.
Бесколлекторные агрегаты применяются не только в промышленном производстве.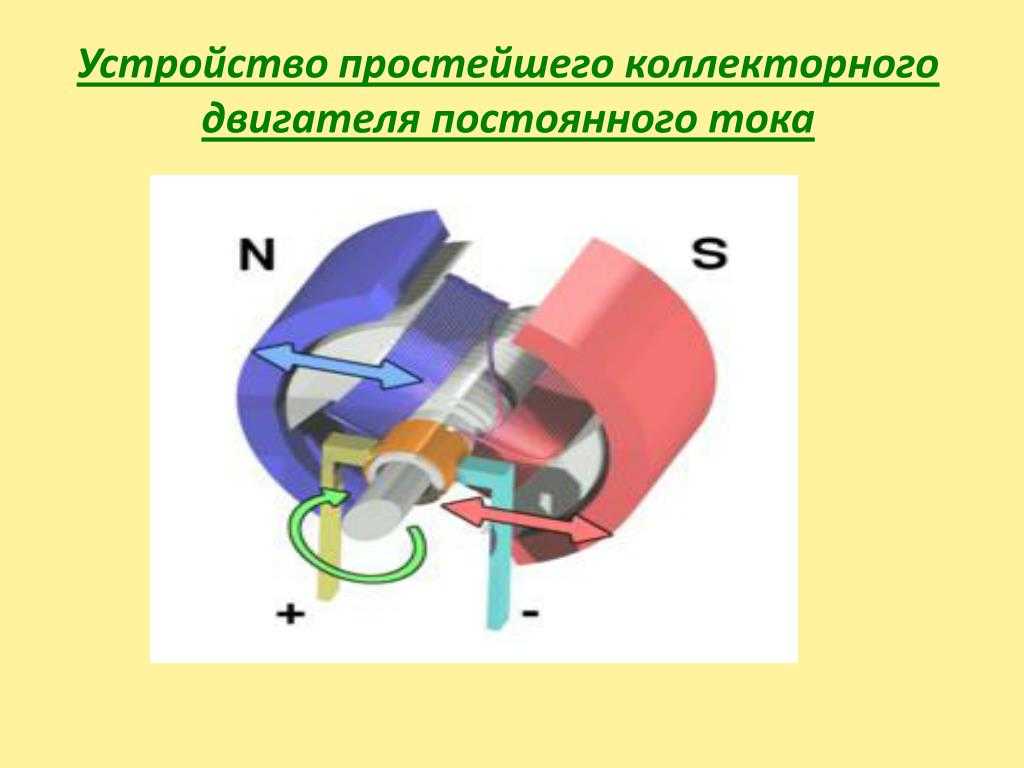 Они востребованы и в быту, где на их основе производятся такие нужные в домашнем хозяйстве устройства, как электрические мясорубки, холодильники, пылесосы, а также вентиляторы, соковыжималки и т.п. Универсальность этих агрегатов заключается в том, что они выпускаются в двух исполнениях, одно из которых работает от сети переменного тока, а второе – от постоянного напряжения. Это позволяет применять такой электродвигатель в миниатюрных приборах самого широкого назначения.
Они востребованы и в быту, где на их основе производятся такие нужные в домашнем хозяйстве устройства, как электрические мясорубки, холодильники, пылесосы, а также вентиляторы, соковыжималки и т.п. Универсальность этих агрегатов заключается в том, что они выпускаются в двух исполнениях, одно из которых работает от сети переменного тока, а второе – от постоянного напряжения. Это позволяет применять такой электродвигатель в миниатюрных приборах самого широкого назначения.
Асинхронные электродвигатели – самый распространенный тип устройств, преобразующих электрическую энергию во вращательное движение. Изделия этого класса широко применяются в самых различных областях народнохозяйственной деятельности. Чаще всего они используются в качестве приводных агрегатов, устанавливаемых в дерево- и металлообрабатывающих станках и в подобных им механизмах.
В бытовых условиях асинхронные двигатели применяются в приборах, где не требуется регулировка скорости вращения вала.
 К этой категории относятся следующие изделия:
К этой категории относятся следующие изделия:- Холодильники различных типов.
- Бытовые вентиляторы.
- Стиральные машины.
- Электробритвы.
- Звуковоспроизводящая аппаратура и другие устройства.
Однофазные синхронные (коллекторные) электродвигатели нередко применяются в быту там, где требуется высокая скорость вращения, а также возможность ее плавного изменения. Они востребованы и в тех областях, где необходима частота вращения вала более 3000 оборотов в минуту. Такой электродвигатель устанавливается в профессиональном и бытовом электроинструменте (в дрелях и перфораторах, например), а также в кофемолках, пылесосах и миксерах.
Похожие темы:
- Микродвигатели. Виды и устройство. Подключения и особенности
- Магнитные двигатели. Виды и устройство. Применение и работа
- Тахогенераторы. Виды и устройство. Работа и применение
- Сельсины. Виды и режимы работы. Принцип действия и особенности
- Вентильные двигатели.
 Виды и устройство. Работа и применение
Виды и устройство. Работа и применение
Основы электродвигателей
Основы электродвигателейОсновы http://tristate.apogee.net/mnd/mfunmen.asp
Между моторами и двигателями есть небольшая, но важная разница. Ан двигатель представляет собой устройство, которое преобразует химическую энергию в виде бензина, дизельного топлива или природного газа, к вращающейся механической энергии. Электродвигатель – это устройство, преобразующее электрическую энергию от источника питания во вращающуюся механическая энергия.
Многие устройства, работающие по принципу вращения, такие как вентиляторы, насосы, конвейеры и электроинструменты в основном используют электродвигатели. Такой электрический двигатели играют важную роль во многих современных высокопроизводительных отраслях промышленности, также способствуя повышению качества жизни в офисах и домах.
В Соединенных Штатах от 50 до 60 процентов всей энергии, продаваемой электрическими
коммунальные услуги используются для питания электродвигателей, которые на самом деле генерируют больше
вращающейся механической энергии, чем все легковые автомобили в США вместе взятые.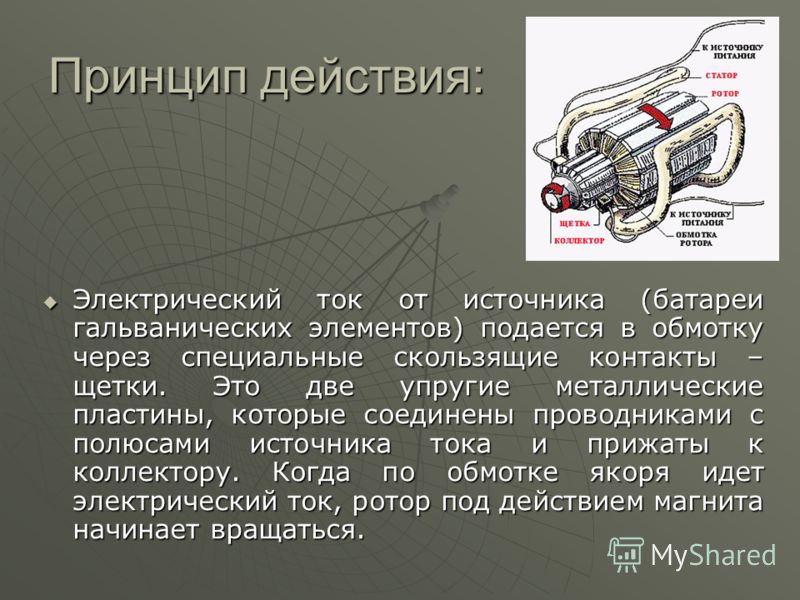 Понимание электродвигателей жизненно важно для анализа энергопотребления
и изменение производства таким образом, чтобы экономить энергию и деньги.
Понимание электродвигателей жизненно важно для анализа энергопотребления
и изменение производства таким образом, чтобы экономить энергию и деньги.
Магнетизм
Магнетизм — это сила, которая создает вращение для работы двигателя. полюса постоянного магнита соединены магнитными силовыми линиями. принцип магнетизма гласит, что разные полюса притягиваются друг к другу при этом подобные полюса отталкиваются. По этому принципу работают двигатели переменного тока.
Когда два стержневых магнита находятся в непосредственной близости друг от друга, возникающее притяжение и
отталкивание создает силу. Магнит слева неподвижен и не может двигаться.
Тот, что справа, свободно вращается и вращается. Как «северный» полюс
вращающийся магнит удаляется от одноименного полюса неподвижного магнита,
«Южный» полюс вращающегося магнита притягивается к противоположному полюсу
неподвижный магнит. Так как разные полюса притягиваются, вращающийся магнит вращается
пока полюса «N» и «S» не сойдутся. Когда это происходит, оба магнита
удовлетворены, и никаких дальнейших действий не произойдет.
Когда это происходит, оба магнита
удовлетворены, и никаких дальнейших действий не произойдет.
Как работают электродвигатели
Электродвигатели работают на принципе магнетизма; где как столбы отталкиваются, а в отличие от полюсов притягиваются.
В простом двигателе свободно вращающийся постоянный магнит установлен между штыри электромагнита. Поскольку магнитные силы плохо распространяются по воздуху, электромагнит имеет металлические башмаки, которые плотно прилегают к полюсам постоянного магнит. Это создает более сильное и стабильное магнитное поле. (Электромагнит работает как статор, а свободно вращающийся магнит — как ротор.) Колебания полярность электромагнита заставляет свободно вращающийся магнит вращаться. полюса меняются путем переключения направления тока в электромагнит.
Направление тока можно изменить одним из двух способов. В DC
двигателя, необходимо поменять местами соединения на аккумуляторе. переменный ток колеблется на
свой собственный.
переменный ток колеблется на
свой собственный.
Статор в двигателе переменного тока представляет собой проволочную катушку, называемую обмоткой статора. Он построен в двигатель. Когда эта катушка питается от сети переменного тока, вращающийся магнитный поле производится.
Когда магнитное поле приближается к проводу, оно производит электрический ток в том проводе. Это называется индукцией. В асинхронных двигателях индуктивное магнитное поле обмотки статора индуцирует ток в роторе. Этот индуцированный ток ротора создает второе магнитное поле, необходимое для ротора повернуть.
Асинхронные двигатели оснащены беличьими роторами, которые напоминают
Колеса для упражнений часто ассоциируются с домашними грызунами, такими как песчанки. Несколько металлических
стержни размещены внутри торцевых колец по цилиндрической схеме. Потому что бары
соединенные друг с другом этими концевыми кольцами, внутри образуется замкнутая цепь.
ротор.
Рассмотрим крупный план двухполюсного статора и одного из его роторных стержней. Переменный ток, протекающий в статоре, вызывает быструю смену полюсов, с севера на юг и обратно. Если ротору дать вращение, стержни разрезаются силовые линии статора. Это вызывает протекание тока в стержне ротора. Этот поток тока приводит магнитные силовые линии в круговое движение вокруг ротора бары. Силовые линии ротора, движущиеся в том же направлении, что и статор, добавить к магнитному полю и ротор продолжает вращаться.
Электромагнетизм
Как работают электромагниты
Электромагниты похожи на постоянные магниты, но производят намного сильнее. магнитные поля. Электродвигателям требуется эта дополнительная мощность.
Чтобы сделать электромагнит, железный стержень обматывают изолированной проволокой. Стержень
называется «ядром».
Электрический ток протекает по проводу, когда он подключен к батарее. Этот ток намагничивает железный сердечник. После намагничивания сердечник имеет обе буквы «N». и S-образные полюса. Полюса электромагнита можно поменять местами, изменив направление течения тока.
| Когда один или оба конца провода на аккумуляторе
отключается, ток прекращается, и сердечник теряет свой магнетизм. Переменный ток меняет направление сам по себе, вызывая смешение полюсов. электромагнит для переключения. |
http://tristate.apogee.net/mnd/mfunmen.asp
Электродвигатели | Дистрибьютор | HVH Industrial Solutions
Электродвигатели — это рабочая лошадка трансмиссионной отрасли, и это факт. Он преобразует энергию, полученную от электричества, во вращательное движение для использования в домах, на производстве и практически где угодно.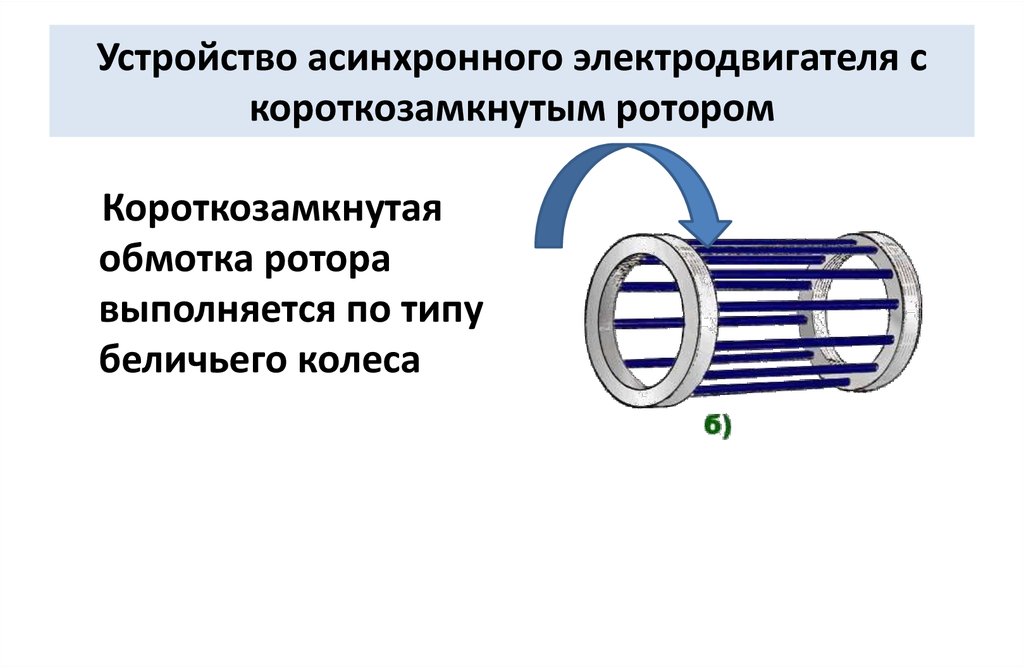 Все двигатели имеют общие характеристики, которые необходимо указывать при их спецификации.
Все двигатели имеют общие характеристики, которые необходимо указывать при их спецификации.
Существует два основных класса электродвигателей: те, которые работают на переменном токе, называемом AC, и те, которые работают на постоянном токе, или DC. Типы переменного тока включают однофазный и трехфазный, также называемый многофазным. Типы постоянного тока включают постоянный магнит, шунтирующую обмотку, последовательную обмотку и составную обмотку. Другие конструкции включают сервоприводы, шаговые двигатели и т. д.
Принцип работы электродвигателейЭлектродвигатель работает по принципу электромагнитной индукции — физического процесса генерирования электрического тока в замкнутой цепи при условии изменения магнитный поток, проходящий через него.
По этому принципу первый электродвигатель был создан в 1821 году британским ученым Майклом Фарадеем. Это была распущенная стальная проволока, погруженная в чан со ртутью, где посередине был установлен вечный магнит. Под влиянием электрического воздействия на провод последний образовывал вокруг себя циклическое магнитное поле, заставляя его вращаться вокруг магнита.
Под влиянием электрического воздействия на провод последний образовывал вокруг себя циклическое магнитное поле, заставляя его вращаться вокруг магнита.
Позднее принцип работы электродвигателя (электромагнетизм) довел до ума русский ученый Б. С. Якоби. Он первым в 1834 году изобрел техническое устройство, способное создавать круговое вращение, что дало начало механическим устройствам, приводимым в движение. Развивая эту идею, Якоби добился увеличения мощности своего первого прототипа электродвигателя с 15 Вт до 550 Вт.
В 1839 году электродвигатель этого гения смог развить одну лошадиную силу, что позволило двигать по реке против течения лодку весом около тонны.
Конструкция любого электродвигателя основана на наличии двух наиболее существенных элементов — неподвижной части «статор» («индуктор» для двигателей постоянного тока) и подвижной части «ротор». («якорь» для машин постоянного тока). Вращающееся электромагнитное поле создается под действием электрического тока на обмотках статора. Он вращается в определенном направлении под воздействием обмотки ротора, тем самым вызывая индукционный ток. Закон Ампера объясняет этот процесс: на проводник под напряжением, погруженный в зону электромагнитного поля, действует электродвижущая сила. Электродвигатели различаются параметром скорости вращения ротора (якоря), который зависит от числа пар магнитных полюсов и частоты первичного питающего напряжения.
Он вращается в определенном направлении под воздействием обмотки ротора, тем самым вызывая индукционный ток. Закон Ампера объясняет этот процесс: на проводник под напряжением, погруженный в зону электромагнитного поля, действует электродвижущая сила. Электродвигатели различаются параметром скорости вращения ротора (якоря), который зависит от числа пар магнитных полюсов и частоты первичного питающего напряжения.
Вы можете проверить изображение ниже, чтобы визуально понять, где какая часть.
1. Статор 2. Ротор 3. Клеммная коробка 4. Обмотка статора 5. Вал
Другие части, которые мы не упомянули, это клеммная коробка, обмотка статора и вал. Клеммная коробка является защитным устройством для электродвигателя. Обмотка статора состоит из трех одиночных катушек, уложенных друг относительно друга под углом 120 градусов. Вал преобразует энергию двигателя в конечную энергию. Это важная и центральная часть любого типа электродвигателя.
Электродвигатель — электрическое устройство, преобразующее электрическую энергию в механическую.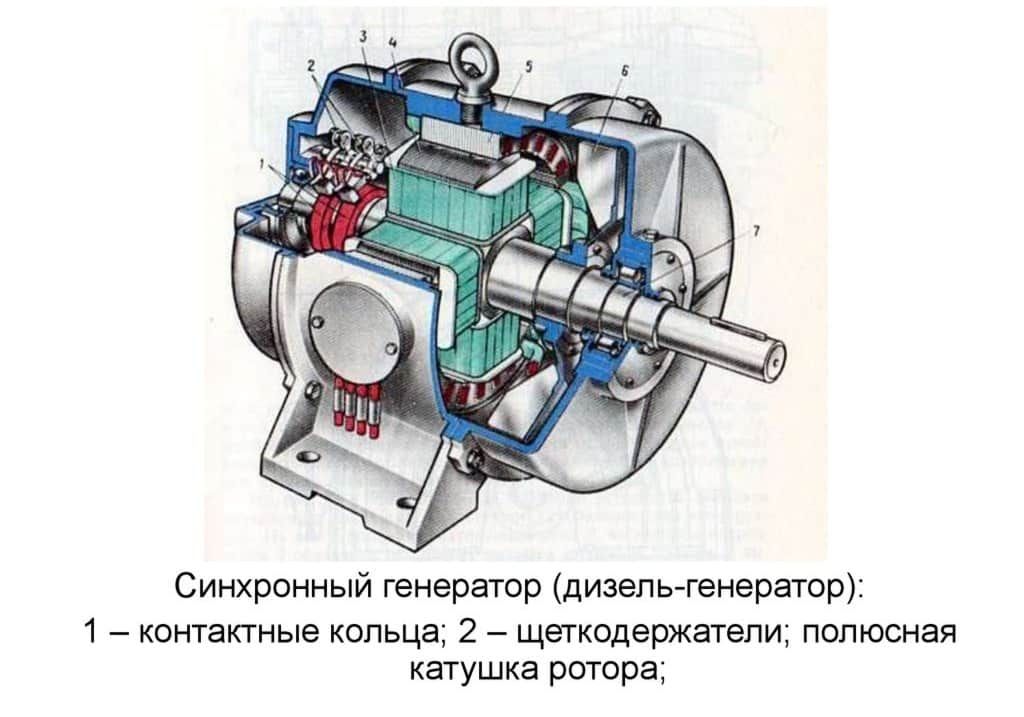 Он предназначен для постоянного вращения или для линейного перемещения на значительное расстояние, в зависимости от размера. Они работают по следующему принципу: проводник с током создает электромагнитное поле, которое может быть натянуто или защищено другим электромагнитным полем. В мире существует широкий спектр электродвигателей, но их отличие заключается в способе создания магнитного поля и управления током.
Он предназначен для постоянного вращения или для линейного перемещения на значительное расстояние, в зависимости от размера. Они работают по следующему принципу: проводник с током создает электромагнитное поле, которое может быть натянуто или защищено другим электромагнитным полем. В мире существует широкий спектр электродвигателей, но их отличие заключается в способе создания магнитного поля и управления током.
Электродвигатели более эффективны в промышленности, чем любая другая электрическая машина. Они легче, меньше, механически проще и дешевле в сборке, более долговечны и надежны, обеспечивают мгновенный и устойчивый крутящий момент на любой скорости и не выделяют углерод в атмосферу. Электродвигатели — это очень удобные изделия для различных внутренних и наружных применений. Они доступны в версиях Национальной ассоциации производителей электрооборудования (NEMA) и Международной электротехнической комиссии (IEC), которые подразделяются на следующие типы:
Двигатели переменного тока
Двигатели переменного тока питаются от источников переменного тока, таких как электрические сети, инверторы или электрические генераторы. Они доступны в однофазном и трехфазном исполнении. Однофазный означает, что на двигатель подается сигнал только 1 В. Однофазные двигатели обеспечивают питание 115 В или 230 В, обычно используемые в домах и на небольших фабриках. Трехфазные двигатели обеспечивают напряжение 460 В, 575 В или выше и идеально подходят для тяжелонагруженного оборудования. Двигатели переменного тока состоят из двух основных частей: ротора и статора, где статор создает магнитное поле и заставляет ротор вращаться.
Они доступны в однофазном и трехфазном исполнении. Однофазный означает, что на двигатель подается сигнал только 1 В. Однофазные двигатели обеспечивают питание 115 В или 230 В, обычно используемые в домах и на небольших фабриках. Трехфазные двигатели обеспечивают напряжение 460 В, 575 В или выше и идеально подходят для тяжелонагруженного оборудования. Двигатели переменного тока состоят из двух основных частей: ротора и статора, где статор создает магнитное поле и заставляет ротор вращаться.
Синхронные двигатели
Синхронный двигатель — это двигатель переменного тока, вращение которого синхронизировано с электрической частотой переменного тока. Этот двигатель вращается с постоянной (синхронной) скоростью, как следует из названия. Синхронные двигатели широко используются в приложениях, требующих высокой точности и постоянной скорости, например, в бумажной и текстильной промышленности. Они бывают однофазными и трехфазными. Однофазные синхронные двигатели подходят для точных устройств синхронизации, таких как часы или магнитофоны. Трехфазные синхронные двигатели встречаются в отраслях, где существует большая, достаточно постоянная механическая нагрузка.
Однофазные синхронные двигатели подходят для точных устройств синхронизации, таких как часы или магнитофоны. Трехфазные синхронные двигатели встречаются в отраслях, где существует большая, достаточно постоянная механическая нагрузка.
Асинхронные двигатели
Асинхронный двигатель / асинхронный двигатель — это самый простой и надежный двигатель переменного тока в мире двигателей. Он работает по принципу индукции, когда электромагнитное поле индуцируется в роторе, когда вращающееся магнитное поле статора вырезает неподвижный ротор. Мы называем двигатели асинхронными, потому что они работают с меньшей скоростью, чем их синхронная скорость. Это скорость вращения магнитного поля статора. Асинхронные двигатели доступны в однофазных, трехфазных и двухфазных версиях.
Двигатели постоянного тока
Двигатели постоянного тока питаются от источников постоянного тока, как следует из названия. Постоянный ток не меняет направления и всегда движется в одном и том же направлении. Отличным примером постоянного тока является батарея с двумя пластинами: анодной (+) и катодной (-), разделенными электролитом. Электролит создает химическую реакцию, заставляющую электроны двигаться от анода к катоду внутри батареи. Хотя они более сложны и требуют большего обслуживания, чем двигатели переменного тока, двигатели постоянного тока могут работать с регулируемой скоростью при подключении к относительно простым контроллерам.
Постоянный ток не меняет направления и всегда движется в одном и том же направлении. Отличным примером постоянного тока является батарея с двумя пластинами: анодной (+) и катодной (-), разделенными электролитом. Электролит создает химическую реакцию, заставляющую электроны двигаться от анода к катоду внутри батареи. Хотя они более сложны и требуют большего обслуживания, чем двигатели переменного тока, двигатели постоянного тока могут работать с регулируемой скоростью при подключении к относительно простым контроллерам.
Серводвигатели
Серводвигатель — это особый класс двигателей с малой инерцией и высокой реакцией. Он состоит из двигателя, соединенного с датчиком обратной связи по положению. Двигатель позволяет двигателю разгоняться с нуля до полной скорости за миллисекунды. Они предназначены для самых сложных условий эксплуатации, работы в экстремальных температурных условиях, для приложений с быстрым реверсированием и точным позиционированием, таких как контрольное оборудование, станки, упаковочные машины и приложения для захвата и размещения.
Сегодня почти в любом механическом устройстве используется сочетание кинетической и потенциальной энергии — механическая энергия является источником движущей силы, отвечающей за работу всей системы. С открытием электричества стало возможным преобразовывать механическую энергию из электрической с помощью электромеханической машины — электродвигателя. Таким образом, электродвигатели настолько широко распространены, что можно сказать, что электродвигатели есть везде.
Теперь поговорим о конкретном использовании конкретных электродвигателей.
Электродвигатель переменного тока используется в дробилках, насосах, деревообрабатывающих станках и т. д. Мощность этого электродвигателя колеблется от 0,2 до 200 и выше киловатт. Двигатели постоянного тока используются в электрических мопедах, электромобилях, игрушках и различных строительных машинах. Теперь давайте проверим, где мы используем асинхронные и синхронные двигатели. Асинхронные двигатели применяются во многих отраслях техники, в кондиционерах, стиральных машинах и т. д. Также эти двигатели применяются в промышленности, например, в металлообработке или ткацком производстве. Например, синхронные двигатели используются в насосных станциях.
Асинхронные двигатели применяются во многих отраслях техники, в кондиционерах, стиральных машинах и т. д. Также эти двигатели применяются в промышленности, например, в металлообработке или ткацком производстве. Например, синхронные двигатели используются в насосных станциях.
Различные ученые пытались создать экономичный и мощный двигатель с первой половины 19 века. Основой послужило открытие М. Фарадея, сделанное в 1821 г. Он обнаружил, что проводник, помещенный в магнитное поле, вращается.
В 1833 году изобретателю Томасу Давенпорту удалось сконструировать двигатель постоянного тока, а позднее, в 1834 году, ученому Б.С. Якоби придумал прототип современной модели двигателя с вращающимся валом.
Устройство, более похожее на современные агрегаты, появилось в 1886 году, и по сей день электродвигатель продолжает совершенствоваться. В настоящее время существует много типов электродвигателей, но эти открытия имели жизненно важное значение для дальнейшего развития двигателей.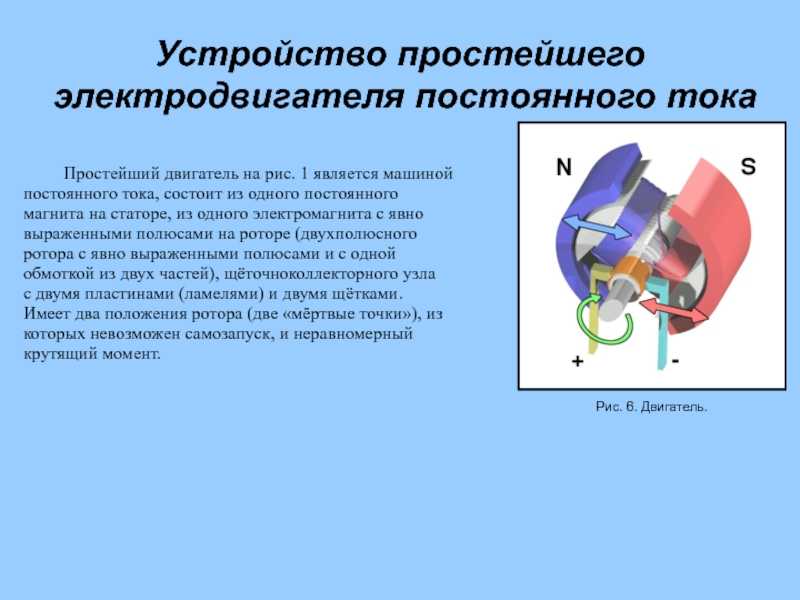
HVH Industrial Solutions — дистрибьютор электродвигателей (и не только), расположенный в Нью-Джерси, США. Наша компания работает с такими популярными производителями двигателей, как WEG, Elektrim, Toshiba, MGM, Aurora Motors и др.
Наша компания тесно сотрудничает с этими известными брендами и предлагает лучшие цены. Вы можете просмотреть наш каталог или отправить предложение.
На нашем сайте вы можете найти различные типы электродвигателей. Вы можете просмотреть каталог для насосов, двигателей для тяжелых условий эксплуатации, тормозов и двигателей общего назначения. Все двигатели представлены с их основными характеристиками, поэтому вы можете найти именно тот, который вам нужен.
Вы также можете искать двигатели по их стандартам.
Стандарты NEMA и IEC для двигателей Как и многие другие промышленные товары, электродвигатели также имеют стандарты. Североамериканские стандарты двигателей (составленные и опубликованные NEMA) являются согласованными стандартами и общеприняты в США, Канаде, Мексике и других странах, где используется мощность 60 Гц.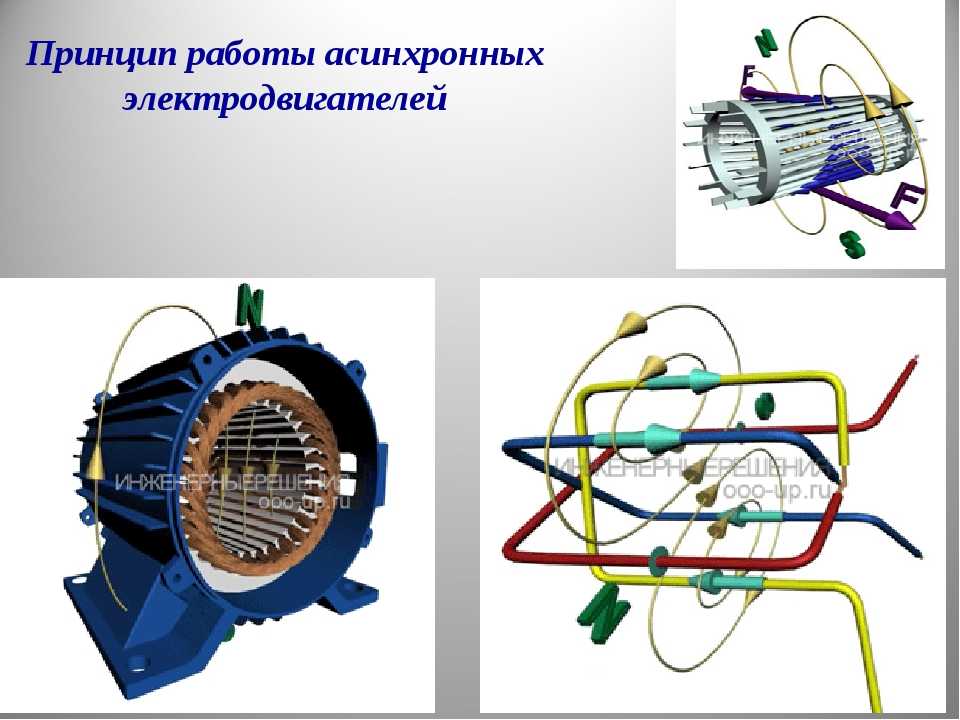
Однако для компаний, экспортирующих машины и оборудование за пределы США и Канады, спецификаторы двигателей должны быть знакомы с такими стандартами, как IEC.
Стандарты МЭК приняты конвенцией и имеют силу закона в Европейском сообществе. Стандарты МЭК также принимаются консенсусом (не имеющим обязательной юридической силы) в регионах за пределами ЕЭС, где используется мощность 50 Гц. Сюда входят участки Восточной Европы, Африки и части Азии.
Стандарты двигателей IEC во многом отличаются от стандартов Северной Америки. В том числе:
- В стандартах МЭК используется система единиц СИ. Стандарты
- IEC охватывают двигатели как на 50, так и на 60 Гц. Стандартные двигатели IEC
- имеют характеристики скорости и крутящего момента, аналогичные, но не идентичные, характеристикам двигателей NEMA Design A и B; нет эквивалентов IEC для двигателей конструкций C и D. Стандартные двигатели IEC
- часто имеют более высокие токи блокировки ротора, чем аналогичные североамериканские двигатели типа B, но они аналогичны двигателям типа A.
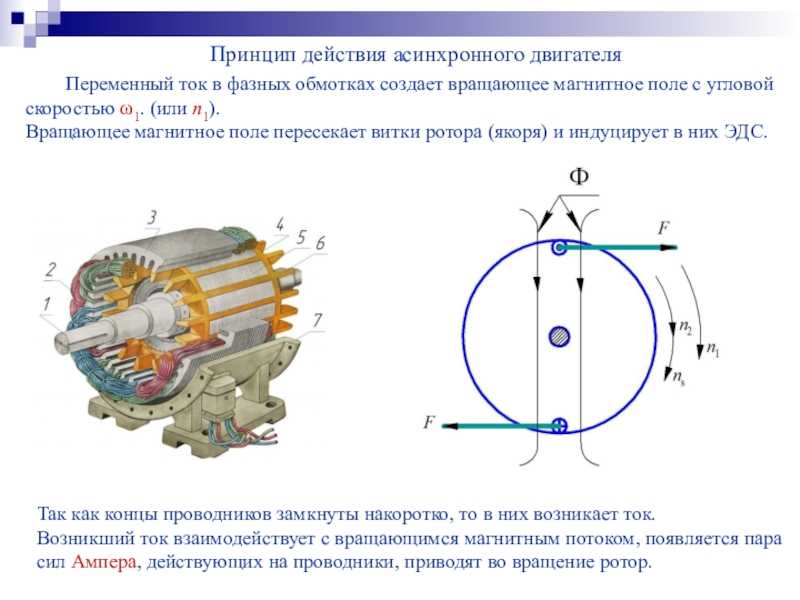 Стандарты
Стандарты - IEC определяют девять типов рабочих циклов. Определение IEC для непрерывного режима работы (тип Si) аналогично двигателям Северной Америки.
- Размеры удлинения вала, C-образной поверхности и D-образного фланца для двигателей IEC отличаются от двигателей для Северной Америки. Обозначения рамы
- IEC от 56 до 355L. Цифры обозначают приблизительное расстояние от пола до осевой линии шахты в миллиметрах.
- Для взрывозащищенных двигателей и двигателей для других опасных зон страны ЕС разработали строгие стандарты EN 50 014 и EN 50 018. Двигатель, который был испытан, зарегистрирован или признан соответствующим североамериканским стандартам для опасных зон, не должен рассматриваться как соответствующий стандартам IEC или наоборот.
Теперь поговорим об электродвигателях. Как мы уже упоминали, существует два основных типа двигателей: двигатели переменного и постоянного тока.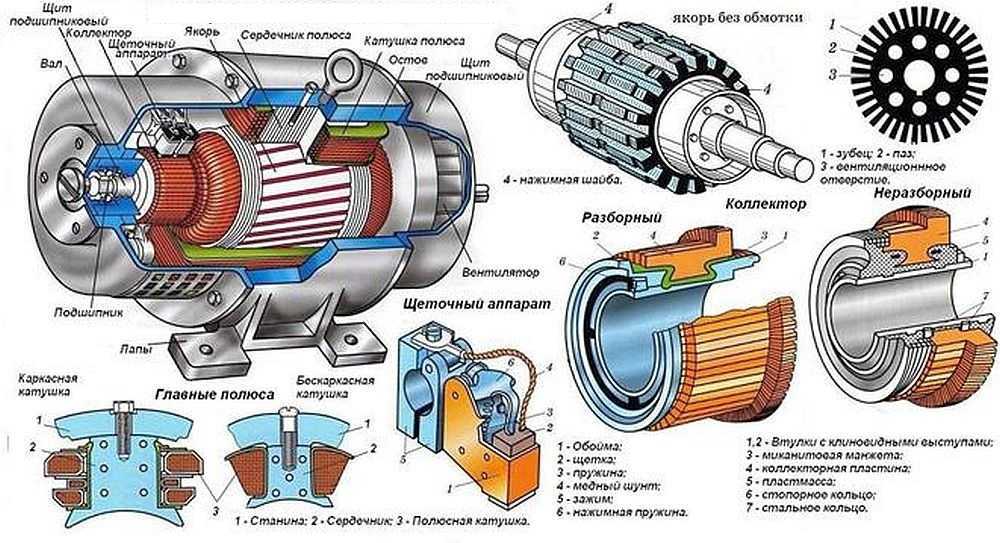 Вот десять фактов:
Вот десять фактов:
- Вы когда-нибудь слышали об одном молекулярном электродвигателе? Пожалуйста, не расстраивайтесь; это факт. Это самый маленький электродвигатель в мире, сделанный из одной молекулы бутилметилсульфида.
- Первый промышленный электродвигатель был разработан в 1834 году русским ученым Борисом Семёновичем Якоби (известным также как Мориц Герман). Джейкобу удалось увеличить мощность электродвигателя до 550 Вт.
- Первый электродвигатель на корабле был использован 13 сентября 1838 года.
- Простой двигатель постоянного тока состоит из шести основных частей: якоря (ротора), щеток, оси, коллектора, магнитного поля и какого-либо источника питания постоянного тока.
- Почти все игрушки, которые совершают какие-либо движения, имеют моторы.
- Британский ученый Майкл Фарадей впервые продемонстрировал принцип преобразования электрической энергии в механическую в 1821 году. Так он официально считается изобретателем электродвигателя.

- «Двигатель Фарадея» часто демонстрируют на школьных уроках физики, с той лишь разницей, что вместо токсичной ртути используется рассол.
- Одним из наиболее влиятельных электродвигателей является двигатель HTS мощностью 36,5 мегаватт (49 000 лошадиных сил), разработанный корпорацией Northrop Grumman.
- Никола Тесла считается изобретателем трехфазного генератора.
- Рынок электродвигателей огромен. Продажи электродвигателей по всему миру в 2020 году составили около 142,7 миллиарда долларов.
электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Смотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Связанные темы:
- синхронный двигатель линейный двигатель двигатель постоянного тока коммутатор серийный двигатель
См. всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.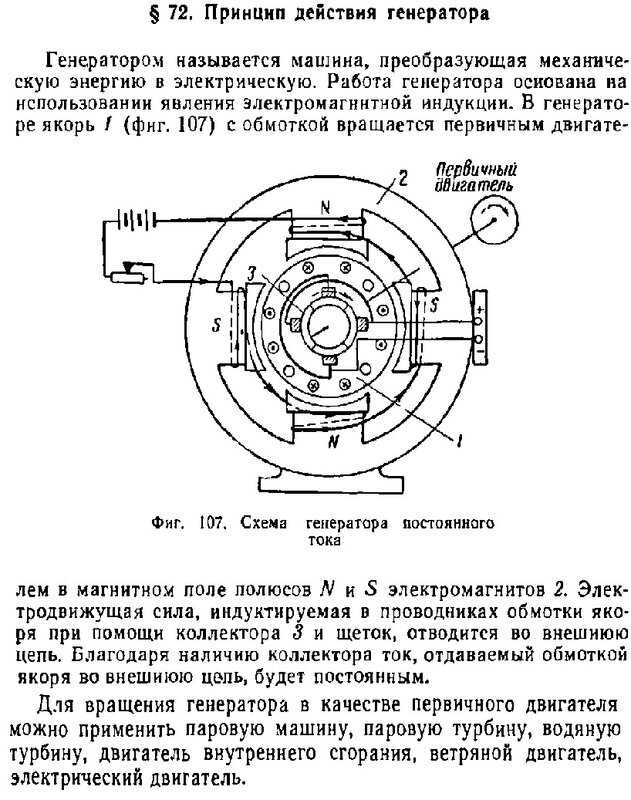
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников с током в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что по обмоткам статора протекает набор трех синусоидальных токов формы, показанной на рисунке.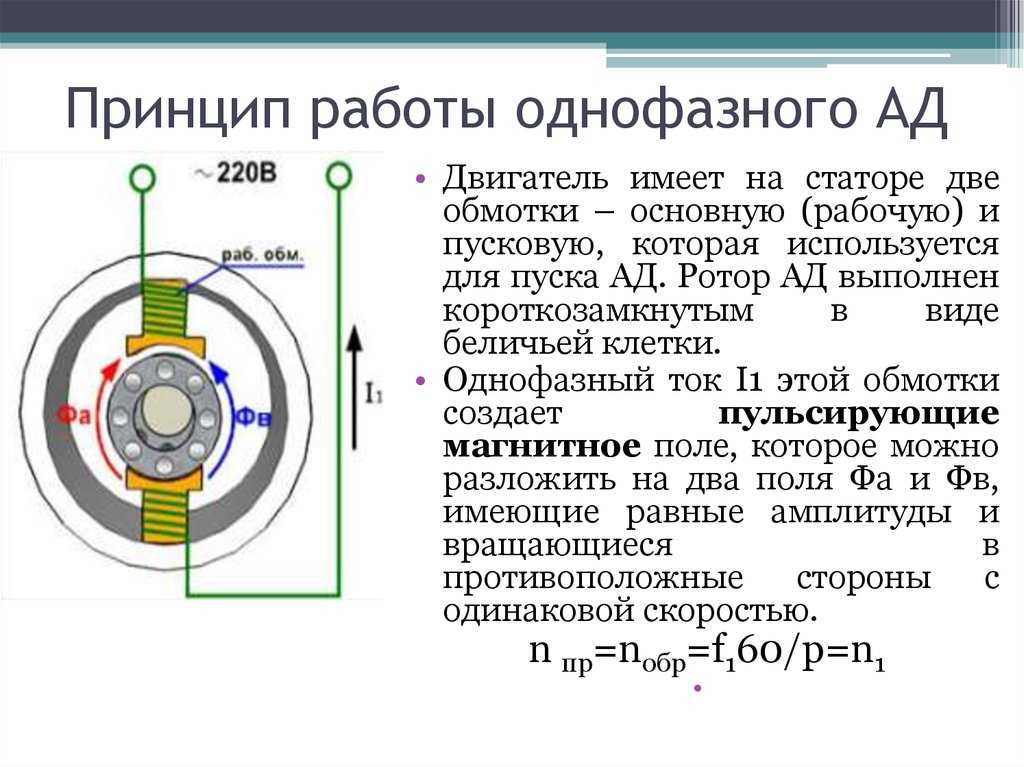 На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a максимальный положительный, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени.
На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a максимальный положительный, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Britannica Quiz
Электричество: короткие замыкания и постоянные токи
В чем разница между электрическим проводником и изолятором? Кто изобрел аккумулятор? Почувствуйте, как ваши клетки горят, пока вы перезаряжаете свою умственную батарею, отвечая на вопросы этой викторины.
Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент т 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент т 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.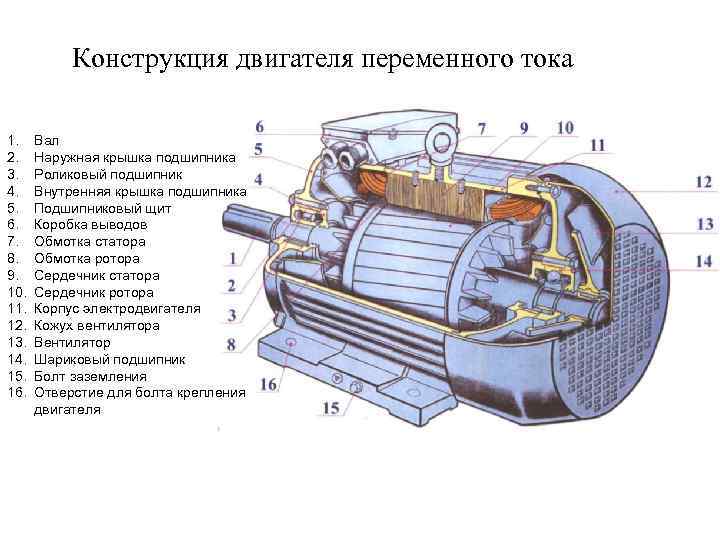
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания соответствует скорости изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания.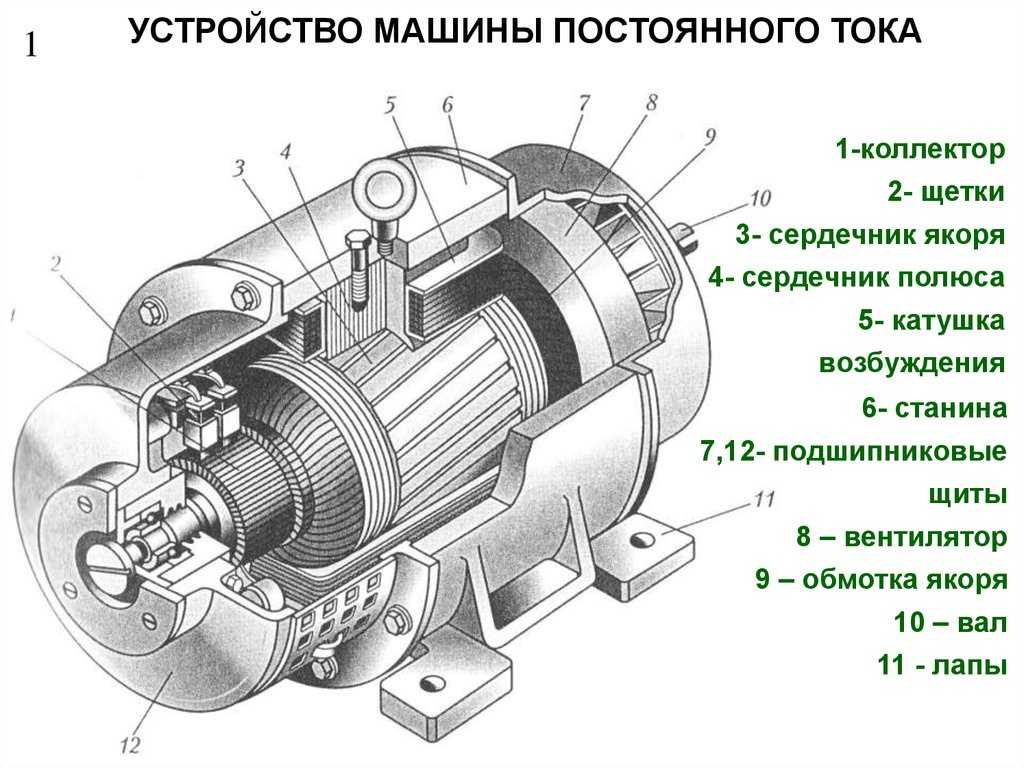 При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ стр )°.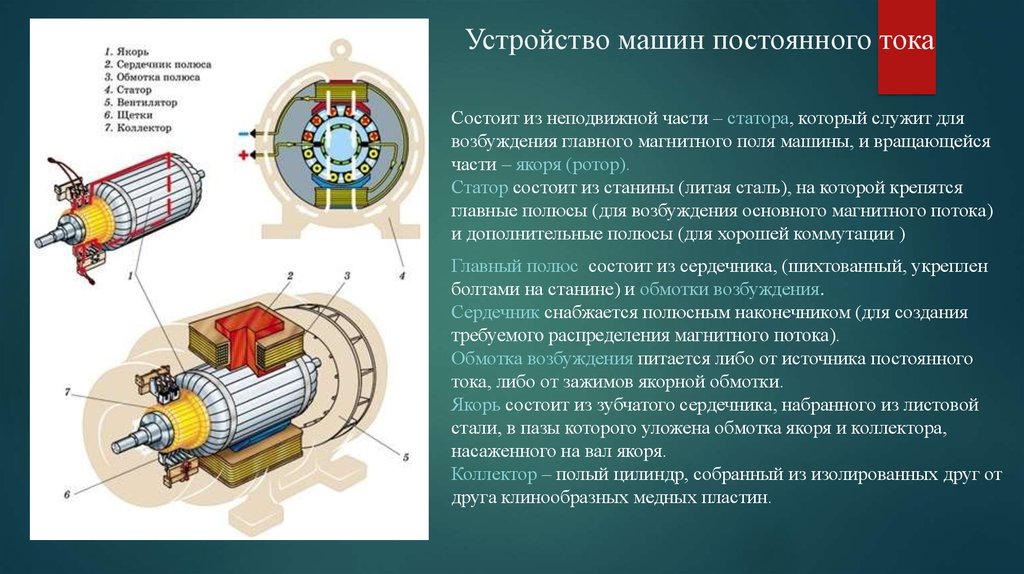 Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Крутящий момент, доступный от корпуса машины, останется неизменным, так как он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Институт — История — Изобретение электродвигателя 1800-1854
Электротехнический институт (ETI)
Краткая история электродвигателей. Часть 1
Унив.-проф. д-р инж. Мартин Доппельбауэр
Резюме С изобретением батареи (Алессандро Вольта, 1800 г.), генерации магнитного поля из электрического тока (Ганс Кристиан Эрстед, 1820 г.) и электромагнита (Уильям Стерджен, 1825 г.) был заложен фундамент для создания электродвигателей. В то время еще оставалось открытым вопрос о том, должны ли электродвигатели быть вращающимися или возвратно-поступательными машинами, т. е. имитировать плунжерный шток паровой машины.
е. имитировать плунжерный шток паровой машины.
Во всем мире над этой задачей параллельно работали многие изобретатели — это была «модная» проблема. Почти ежедневно открывались новые явления. Изобретения в области электротехники и ее приложений витали в воздухе.
Часто изобретатели ничего не знали друг о друге и разрабатывали аналогичные решения самостоятельно. Национальные истории формируются соответственно до наших дней. Нижеследующее является попыткой представить всеобъемлющую и нейтральную картину.
Первое вращающееся устройство, приводимое в действие электромагнетизмом, было построено англичанином Питером Барлоу в 1822 году (Колесо Барлоу).
После многих других более или менее успешных попыток с относительно слабым вращающимся и возвратно-поступательным устройством немецкоязычный пруссак Мориц Якоби создал в мае 1834 года первый настоящий вращающийся электродвигатель , который фактически развивал замечательную механическую выходную мощность.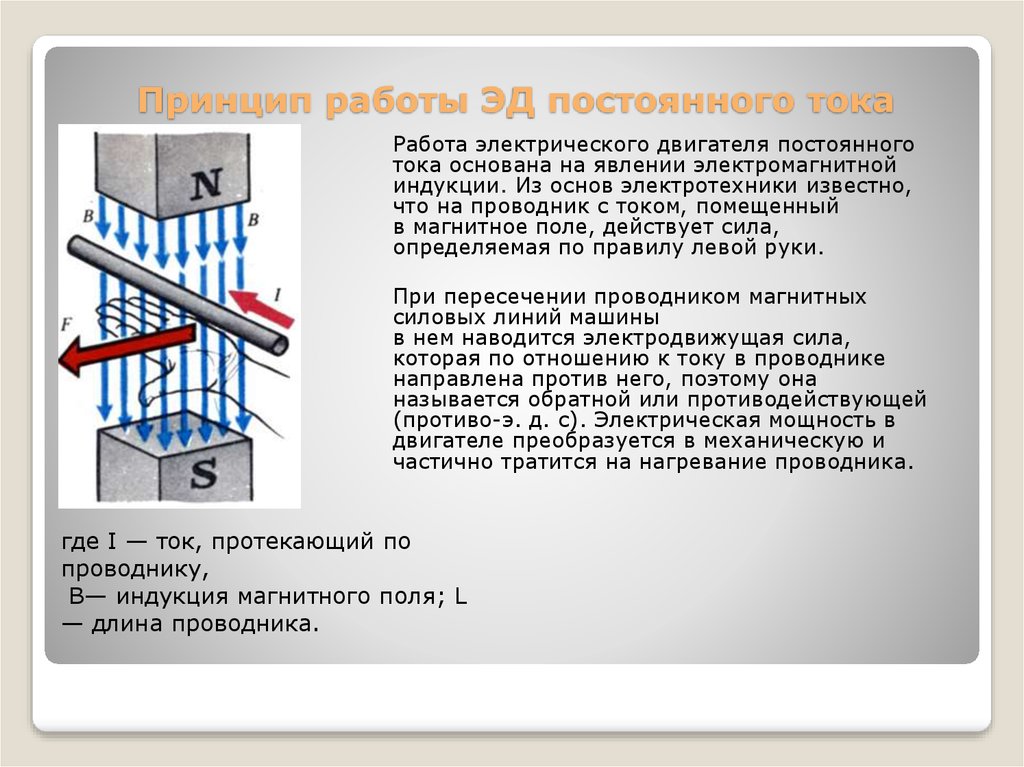 Его мотор установил мировой рекорд, который был улучшен всего четыре года спустя, в сентябре 1838 года, самим Якоби. Его второй мотор был достаточно мощным, чтобы перевезти лодку с 14 людьми через широкую реку. Только в 1839 г./40, что другим разработчикам по всему миру удалось построить двигатели с аналогичными, а затем и с более высокими характеристиками.
Его мотор установил мировой рекорд, который был улучшен всего четыре года спустя, в сентябре 1838 года, самим Якоби. Его второй мотор был достаточно мощным, чтобы перевезти лодку с 14 людьми через широкую реку. Только в 1839 г./40, что другим разработчикам по всему миру удалось построить двигатели с аналогичными, а затем и с более высокими характеристиками.
Уже в 1833 году немец Генрих Фридрих Эмиль Ленц опубликовал статью о законе взаимности магнитоэлектрических и электромагнитных явлений, т.е. обратимости электрического генератора и двигателя . В 1838 году он предоставил подробное описание своих экспериментов с генератором Pixii, который он использовал как двигатель.
В 1835 году два голландца Сибрандус Стратинг и Кристофер Беккер построили электродвигатель, который приводил в действие небольшую модель автомобиля. Это первое известное практическое применение электродвигателя. В феврале 1837 года американцу Томасу Дэвенпорту был выдан первый патент на электродвигатель.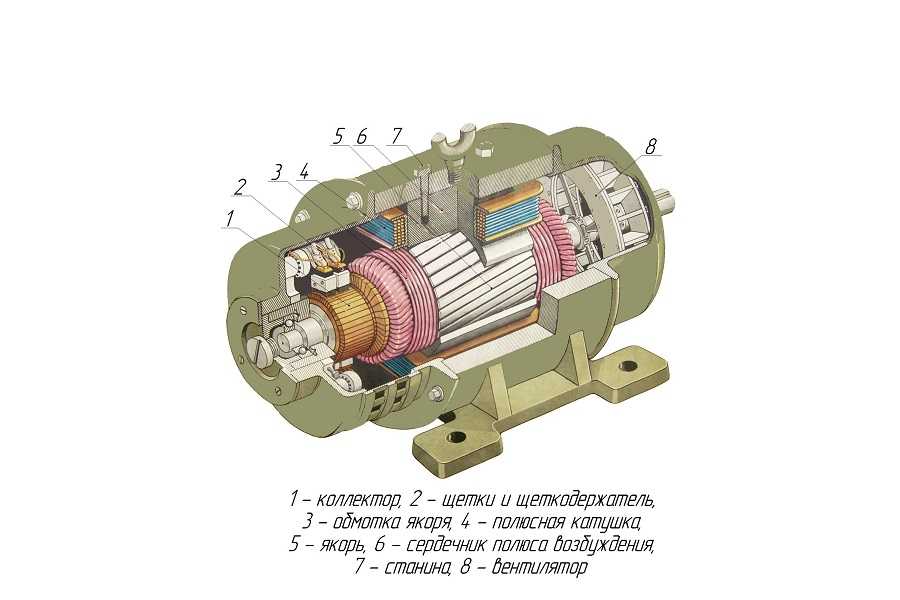
Однако все ранние разработки Якоби, Стратинга, Дэвенпорта и других в конечном итоге не привели к появлению электродвигателей, которые мы знаем сегодня.
Двигатель постоянного тока был создан не на основе этих двигателей, а в результате разработки генераторов энергии (динамометров). Основы были заложены Уильямом Ритчи и Ипполитом Пикси в 1832 году с изобретением коммутатора и, что наиболее важно, Вернером Сименсом в 1856 году с двойным Т-образным анкером и его главным инженером Фридрихом Хефнер-Альтенеком в 1872 году с изобретением барабанная арматура. Сегодня двигатели постоянного тока по-прежнему занимают доминирующее положение на рынке в диапазоне малой мощности (менее 1 кВт) и низкого напряжения (ниже 60 В).
В период с 1885 по 1889 год была изобретена трехфазная электрическая система , которая является основой для современной передачи электроэнергии и передовых электродвигателей. Нельзя назвать ни одного изобретателя трехфазной системы электроснабжения. Есть несколько более или менее известных имен, которые принимали непосредственное участие в изобретениях (Брэдли, Доливо-Добровольски, Феррарис, Хазельвандер, Тесла и Венстрем).
Есть несколько более или менее известных имен, которые принимали непосредственное участие в изобретениях (Брэдли, Доливо-Добровольски, Феррарис, Хазельвандер, Тесла и Венстрем).
Сегодня двигатель трехфазный синхронный используется в основном в высокодинамичных приложениях (например, в роботах) и в электромобилях. Впервые он был разработан Фридрихом Августом Хазельвандером в 1887 году.
Очень успешный трехфазный асинхронный двигатель с короткозамкнутым ротором был впервые построен Михаилом Доливо-Добровольским в 1889 году. Сегодня это наиболее часто производимая машина в диапазоне мощностей 1 кВт и выше.
Расписание 18:00 — 18:34: Первые эксперименты с электромагнитными устройствами| 1800 | Впервые Allessandro Volta (итальянский) вырабатывает непрерывную электрическую энергию (в отличие от искры или статического электричества) из пакета серебряных и цинковых пластин.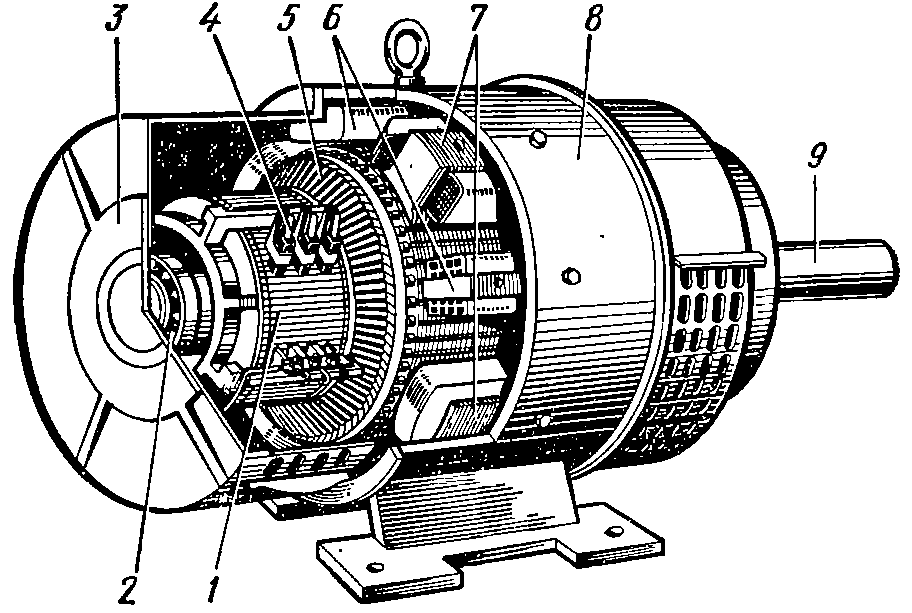 |
| 1820 | Ганс Кристиан Эрстед (Дениш) обнаружил генерацию магнитного поля электрическими токами, наблюдая за отклонением стрелки компаса. Это был первый случай, когда механическое движение было вызвано электрическим током. |
| 1820 | Андре-Мари Ампер (Франция) изобретает цилиндрическую катушку (соленоид). |
| 1821 | Майкл Фарадей (британец) создает два эксперимента для демонстрации электромагнитного вращения. Вертикально подвешенный провод движется по круговой орбите вокруг магнита. | Вращающаяся проволока Фарадея, 1821 г.  Фото предоставлено Отделом труда и промышленности Национального музея американской истории, Смитсоновский институт |
| 1822 | Питер Барлоу (британец) изобретает прялку (колесо Барлоу = униполярная машина). | Колесо Барлоу, 1822 г. Философский журнал, 1822 г., вып. 59 |
| 1825- 1826 | Уильям Стерджен (британец) изобретает электромагнит , катушку из проводов с железным сердечником для усиления магнитного поля. | Первый электромагнит Осетра, 1825 г. Труды Общества поощрения искусств, мануфактур и торговли, 1824 г., том. 43, пл. 3 |
| 1827-1828 | Иштван (Аньос) Едлик (венгр) изобретает первую роторную машину с электромагнитами и коммутатором. Однако Джедлик публично сообщил о своем изобретении только спустя десятилетия, и фактическая дата изобретения неизвестна. До сих пор многие венгры считают, что Джедлик изобрел электродвигатель. Функциональная модель его аппарата выставлена в Художественном музее Будапешта. Хотя на самом деле это мог быть первый электродвигатель, следует понимать, что это устройство не оказало никакого влияния на дальнейшее развитие электрических машин. Изобретение Джедлика долгое время оставалось скрытым и изобретателем не преследовалось. Область электротехники ничем не обязана Джедлику. | Поворотное устройство Jedlik, 1827/28 Фото: Википедия Электромобиль Джедлика, 1827/28 9 гг.0120 Фото: Википедия |
| до 1830 | Иоганн Михаэль Эклинг, механик из Вены, строит двигатель по планам и идеям профессора Андреаса фон Баумгартнера (австрийский физик; с 1823 г.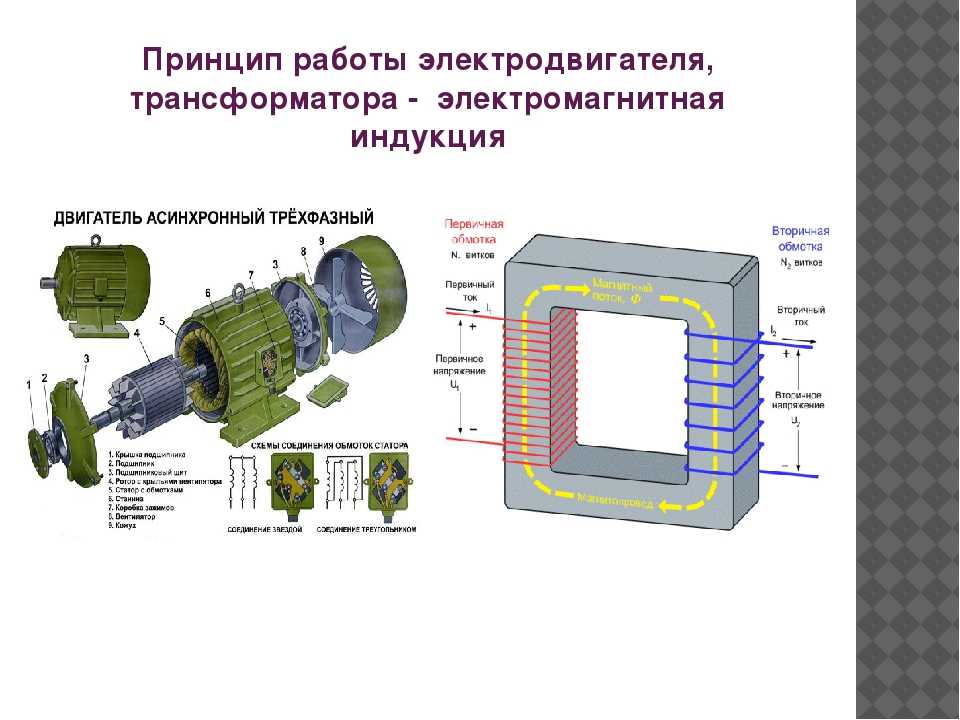 профессор физики и прикладной математики в Вене). профессор физики и прикладной математики в Вене).Этот аппарат был приобретен в 1830 г. Инсбрукским университетом по цене 50 фл. Год постройки неизвестен, но, должно быть, до 1830 года, поскольку дата покупки доказана. | Двигатель Баумгартнера, построенный Эклингом до 1830 г. Фото предоставлено Университетом Инсбрука, Музей экспериментальной физики, АО. ун-т Проф. Маг. Доктор Армин Денот. |
| 1831 | Майкл Фарадей (Великобритания) открывает и исследует электромагнитную индукцию, то есть генерацию электрического тока из-за переменного магнитного поля (обратное открытие Эрстеда). Фарадей положил начало созданию электрического генератора. |
| 1831 | Джозеф Генри (американец) находит закон индукции независимым от Фарадея и строит маленькую магнитную качельку. Он описывает это как «философскую игрушку». Он описывает это как «философскую игрушку». В статье для английского журнала Philosophical Magazine, в 1838 году англичанин Ф. Уоткинс подробно описывает устройство Генри и называет его первым когда-либо известным электродвигателем. Эта точка зрения распространяется и по сей день в основном в британской литературе. | Магнитный коромысло Генри, 1831 American Journal of Science, 1831, vol. 20, с. 342 |
| апрель 1832 | Savatore dal Negro (итальянец) создает устройство, которое может поднять 60 граммов за одну секунду на 5 сантиметров и, следовательно, развивает механическую мощность почти 30 мВт. Он, вероятно, был вдохновлен магнитным коромыслом Генри и создал аналогичную поршневую машину. Однако устройство Даль Негро может производить движение с помощью специального зубчатого механизма. Даль Негро описывает свои эксперименты в письме от апреля 1832 г., а затем в научной статье « Nuova Macchina élettro- Magnetica » в марте 1834 г. | Электромагнитный маятник Даля Негро, 1832 Annali delle Scienze de Regno Lombardo-Veneto, März 1834, pl. 4 |
| июль 1832 | Первое публичное описание вращающейся электрической машины . Автор — анонимный писец с инициалами П.М. Сейчас с большой долей вероятности его идентифицировали как ирландца Фредерика Мак-Клинтока из Дублина. Майкл Фарадей, получатель письма от 26 июля 1832 г., немедленно публикует его. Впервые публично описывается вращающаяся электрическая машина. | Первое описание вращающейся электрической машины П.М., 1832 Философский журнал, 1832, с. 161-162 |
| июль 1832 | Hippolyte Pixii (Франция) строит первый аппарат для получения переменного тока из вращения.
Устройство представлено публично в сентябре 1832 года на собрании Академии наук . Его описание уже напечатано в июльском номере Annales de Chimie . В том же годуPixii улучшил свое устройство, добавив коммутационное устройство. Теперь он может производить пульсирующий постоянный ток. | Первый генератор постоянного тока Pixii, 1832/33 г. 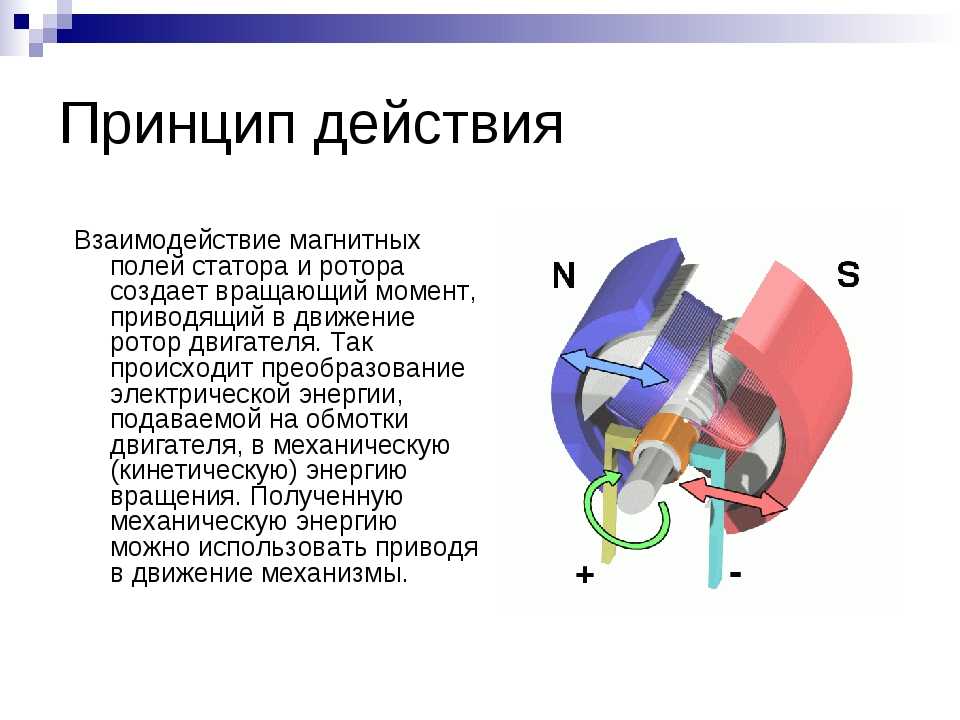 F. Niethammer, Ein- und Mehrphasen-Wechsel-strom-Erzeuger, Verlag S. Hirzel, Leipzig 1906 |
| 1832 | Уильям Ричи (британец) сообщил в марте 1833 г. об устройстве, которое, как он утверждал, построил девятью месяцами раньше, летом 1832 г. Это вращающийся электромагнитный генератор с четырьмя роторными катушками, коммутатором и щетками.
Таким образом, Ритчи обычно считается изобретателем коммутатора. В конце своей статьи Ричи описывает, как он смог вращать электрический магнит, используя магнитное поле Земли. Он мог поднять вес в несколько унций (50-100 граммов). Коммутация производилась двумя концами проводов, входившими в два полукруглых желоба ртути.
| Первый генератор постоянного тока с коммутатором, 1832/33 г.  Вращающаяся катушка Ричи, 1833 Philosophical Trans. Лондонского королевского общества, 1833 г., Vol. 132, стр.316, пл.7 |
| Январь 1833 | A Доктор Шультесс читает лекцию в Обществе инженеров в Цюрихе в 1832 году, в которой описывает свои идеи об электродвигателе. В январе 1833 года он успешно продемонстрировал машину перед тем же цюрихским обществом. Дальнейшие подробности неизвестны. | |
| Март 1833 | Осенью 1832 года Уильям Стерджен строит вращающееся электрическое устройство, которое он публично демонстрирует в марте 1833 года в Лондоне. Как и в случае с Джедликом, нет точных данных о дате и деталях его постройки. Стерджен сообщил об изобретении в 1836 году в первом выпуске собственного журнала. | Вращательное устройство Осетра, 1832 Sturgeon’s Annals of Electricity, 1836/37, vol. 1 |

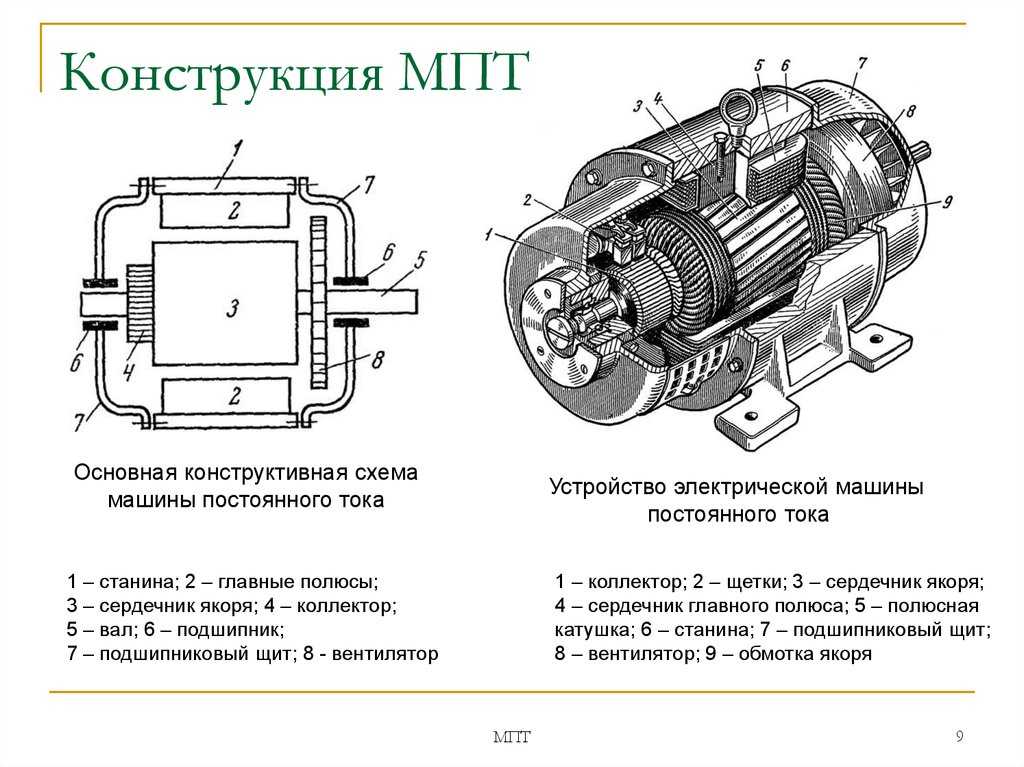
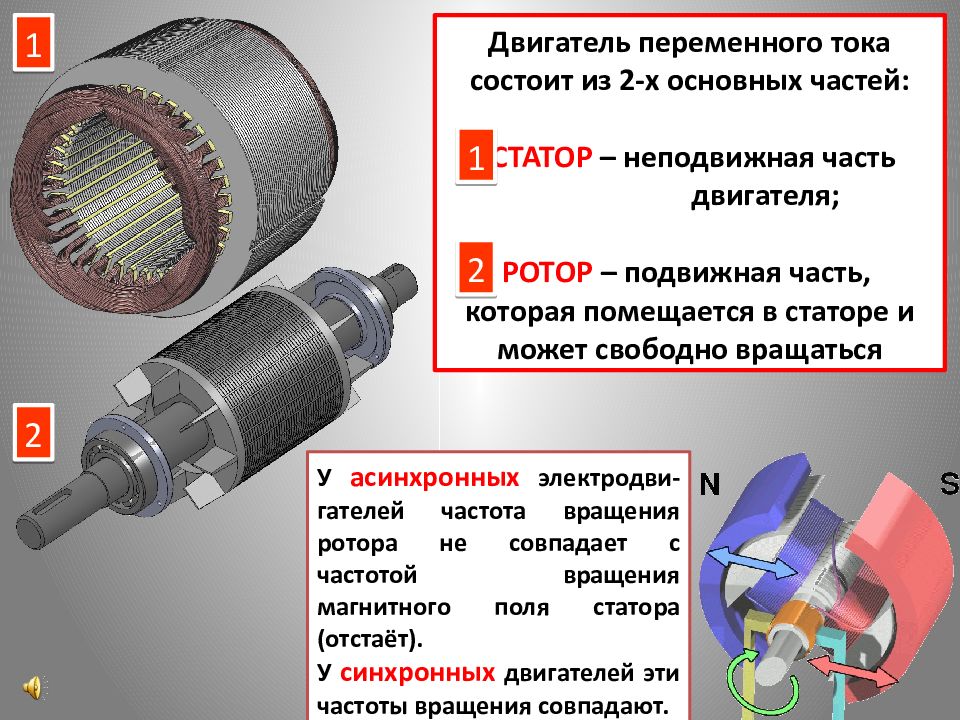
| Декабрь 1833 | В первые годы развития электротехники строго различались магнито-электрические машины, т.е. электрические генераторы, и электромагнитные машины, т.е. электродвигатели. Генрих Фридрих Эмиль Ленц (немецкий) нашел « закон взаимности магнитоэлектрических и электромагнитных явлений », т.е. обратимость электрического генератора и двигателя. Его научный текст читается в конце 1833 г. в Санкт-Петербургской академии наук и опубликован в 1834 г. в «Аннале физики и химии» Поггендорфа . Его идеи постепенно становятся обычным явлением, особенно в 1838 году после нескольких сообщений об успешных экспериментах по обращению. Иногда утверждают, что принцип обращения был открыт в 1861 году итальянцем Пачинотти или даже только в 1873 году случайно на Всемирной выставке в Вене. Оба утверждения ложны. Уже в 1838 году Эмиль Ленц широко сообщил в «Аннале физики и химии» Поггендорфа, как он использовал генератор Pixii в качестве двигателя.
|

| Июль 1834 | Джузеппе Доменико Ботто (итальянец), профессор физики в Турине, публикует в июле 1834 года в женевском журнале Bibliotheque Universelle описание электродвигателя, над которым он работает. Его устройство соответствует метроному (по аналогии с конструкциями Генри и Даль Негро), воздействующему на маятник двумя электромагнитами. Реплика устройства теперь выставлена в Museo Galileo во Флоренции. | Вращающаяся машина Ботто, июль 1834 г. (Реконструкция) Фото предоставлено Музеем Галилея, Флоренция |
 Вращательное движение создается штоком поршня.
Вращательное движение создается штоком поршня.| май 1834 | Мориц Герман Якоби (немецкоязычный пруссак, натурализованный русский) начинает с экспериментов над подковообразным электромагнитом в начале 1833 года в Кенигсберге (тогда Пруссия, ныне Россия). В январе 1834 года он пишет в письме Поггендорфу, редактору Annalen der Physik und Chemie , о своих успехах. Он переходит к конструированию электродвигателя, которое завершает в мае 1834 года. Якоби прямо заявил в меморандуме 1835 года, что он не был единственным изобретателем электромагнитного двигателя. Он указывает на приоритет изобретений Ботто и Даль Негро. Тем не менее, Якоби, несомненно, первым создал пригодный для использования вращающийся электродвигатель. Полнофункциональная копия его двигателя выставлена в Институте электротехники (ETI) Технологического института Карлсруэ (KIT) на улице Энгельберт-Арнольд-Штрассе 5 (здание 11. | Первый настоящий электродвигатель Мориц Якоби, Кенигсберг, май 1834 г. |
| Октябрь 1834 | Американец Т. Эдмундсон строит электромагнитное вращающееся устройство, напоминающее водяное колесо. | Электромагнитное колесо Эдмундсона American Journal of Science, 1834, vol. 26, с. 205 |
| 1834-1835 | В декабре 1833 года кузнец Томас Давенпорт (американец) покупает соленоид непосредственно у Джозефа Генри и начинает эксперименты вместе с Оранжевым Смолли (американец) в мастерской в Форестдейле, штат Вермонт. В июле 1834 года двое мужчин создают свою первую роторную машину. В следующем году Давенпорт расстается со Смолли. Летом 1835 года Давенпорт едет в Вашингтон, округ Колумбия, чтобы продемонстрировать свою машину перед патентным бюро и зарегистрировать ее. Однако из-за отсутствия денег ему приходится безуспешно возвращаться домой. | Первый двигатель Давенпорта из его первой патентной заявки в июне 1835 года |
| Август 1835 | Фрэнсис Уоткинс (британец) создает электрическую «игрушку», с помощью которой он может приводить во вращение несколько магнитных стрелок. Он описывает устройство в статье для Philosophical Magazine . Он признается, что его вдохновила электромагнитная машина (генератор) Джозефа Сакстона, которая с августа 1833 года выставлена в публичной галерее в Лондоне. Уоткинса можно считать одним из первых, кто понял принцип реверсирования двигателя и генератора. | Игрушка Уоткина, 1835 Philosophical Magazine , 1835, vol. 7, с. 112 |
| 1835 | Сибрандус Стратинг и Кристофер Беккер (голландский) построить небольшую (30 х 25 см) трехколесную машину с электрическим приводом и весом около 3 кг. Он может проехать примерно 15-20 минут на столе, пока батарея не разрядится. Stratingh и Becker публикуют отчет о своих успехах в том же году. Стратинг знал работы Якоби и хотел построить настоящий электромобиль в 1840 году, что ему так и не удалось. | Электрическая модель автомобиля Стратинга и Беккера, 1835 г. 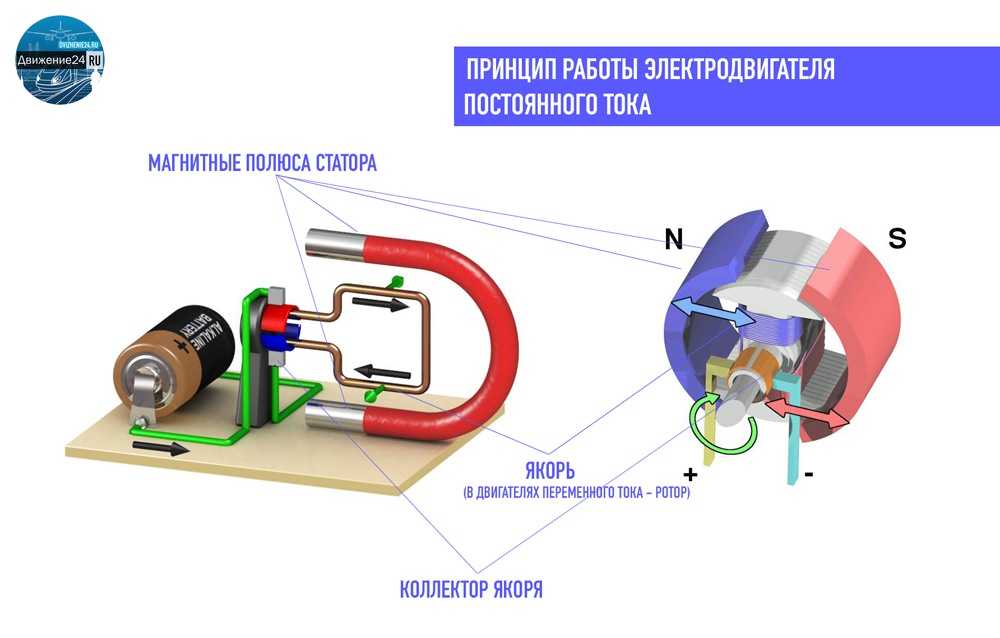 |
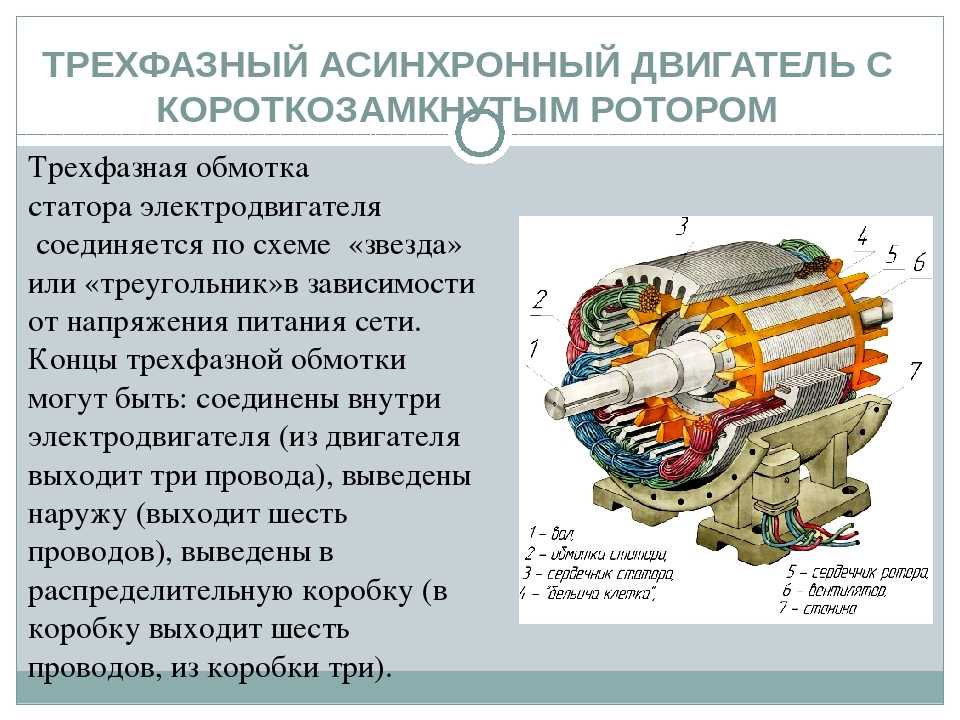 Его двигатель поднимает вес от 10 до 12 фунтов со скоростью один фут в секунду, что эквивалентно примерно 15 ваттам механической мощности.
Его двигатель поднимает вес от 10 до 12 фунтов со скоростью один фут в секунду, что эквивалентно примерно 15 ваттам механической мощности.  10) в Карлсруэ, Германия.
10) в Карлсруэ, Германия. Они улучшают устройство в несколько этапов, прежде чем впервые публично продемонстрировать его в декабре 1834 года.
Они улучшают устройство в несколько этапов, прежде чем впервые публично продемонстрировать его в декабре 1834 года. 0007
0007| Май 1836 | Johann Philipp Wagner (немецкий) представляет электродвигатель на выставке Stiftungsfest из Sencken-bergischen naturforschenden Gesellschaft . Его аппарат подобен устройству, которое создали Стратинг и Беккер. Он может работать около 10 минут, пока батарея не разрядится. Вагнер держит свою конструкцию в секрете, поэтому есть отчеты о демонстрации, но нет чертежей машины. В последующие годы Вагнер развивает свой двигатель и публично демонстрирует улучшенные версии. |
| 1836 1837 | Давенпорт продолжает улучшать свои устройства. В 1836 году он находит нового партнера в Ransom 9.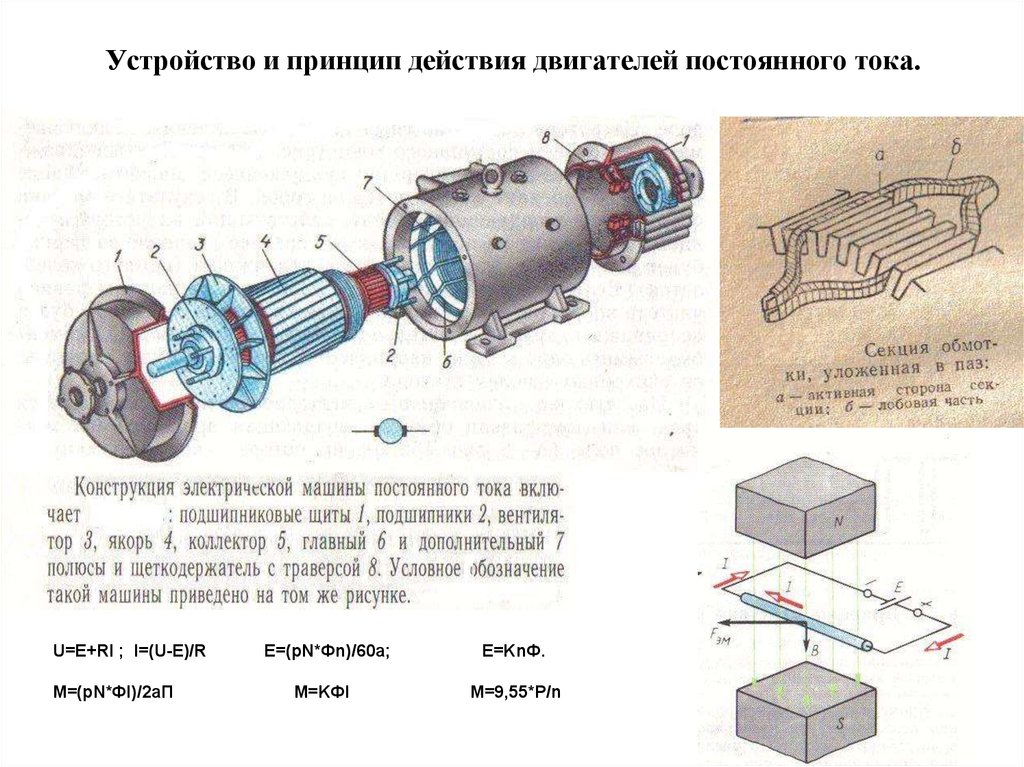 0108 Cook и переезжает в Саратога-Спрингс, штат Нью-Йорк, для дальнейшего развития своих двигателей. С помощью Кука он строит модель для патентного бюро. 0108 Cook и переезжает в Саратога-Спрингс, штат Нью-Йорк, для дальнейшего развития своих двигателей. С помощью Кука он строит модель для патентного бюро. 24 января 1837 года Давенпорт подает в Вашингтон свое предупреждение, а 5 февраля 1837 года он получает первый патент США на электродвигатель: « Усовершенствование тяговых машин с помощью магнетизма и электромагнетизма ». Его модель двигателя сейчас выставлена в Смитсоновском институте в Вашингтоне, округ Колумбия. В запатентованной конструкции Давенпорта используются четыре вращающихся электромагнита, которые переключаются коммутатором, и кольцеобразные фиксированные постоянные магниты, изготовленные из мягкого железа. Усовершенствованный двигатель, который он представляет в августе 1837 года, имеет диаметр 6 дюймов, вращается со скоростью около 1000 оборотов в минуту и может поднимать 200-фунтовый груз на один фут за одну минуту. В последующие годы Давенпорт постоянно улучшал свои конструкции. Вместе с Эдвином Уильямсом из Нью-Йорка и его партнером Рэнсомом Куком 3 марта 1837 года Давенпорт формирует совместную акционерную ассоциацию. Однако Уильямсу не удается продать достаточно акций, и всего год спустя все предприятие рушится. .
| Запатентованный двигатель Давенпорта, февраль 1837 г. |
 Это соответствует мощности 4,5 Вт.
Это соответствует мощности 4,5 Вт.Томас Давенпорт – Изобретатель электродвигателя?
В американо-американской литературе есть несколько полных пафоса текстов, прославляющих Томаса Дэвенпорта как изобретателя электродвигателя. Это утверждение основано на том неоспоримом факте, что Дэвенпорт был первым американцем, создавшим пригодный для использования электродвигатель, а также первым, кто получил патент на такое устройство в начале 1837 г.
Давенпорт, однако, был далеко не первым, кто построил электродвигатель. В Европе (особенно в Англии, Италии и Пруссии) техника была уже значительно развита. Уже летом 1834 года, за три года до патента, Мориц Якоби представил мотор, который был в три раза мощнее усовершенствованной машины, которую Давенпорт разработал через несколько месяцев после подачи заявки на патент. Кроме того, мотор Давенпорта работал быстрее, чем у Якоби. Таким образом, выходной крутящий момент двигателя Давенпорта, решающий фактор при сравнении электрических машин, составлял лишь одну десятую от конструкции Якоби, созданной тремя годами ранее.
В 1835 году, вскоре после двигателя Якоби, два голландца Стратинга и Беккера уже представили первое практическое применение, управляя небольшой электрической моделью автомобиля.
За годы, прошедшие после патента Дэвенпорта, достижения Якоби почти не уменьшились. В то же время, когда Якоби осенью 1838 года продемонстрировал свою следующую машину, двигатель, который был способен иметь выходную мощность 300 Вт и мог вести лодку с 14 людьми через широкую реку, Давенпорт показал крошечную модель поезда.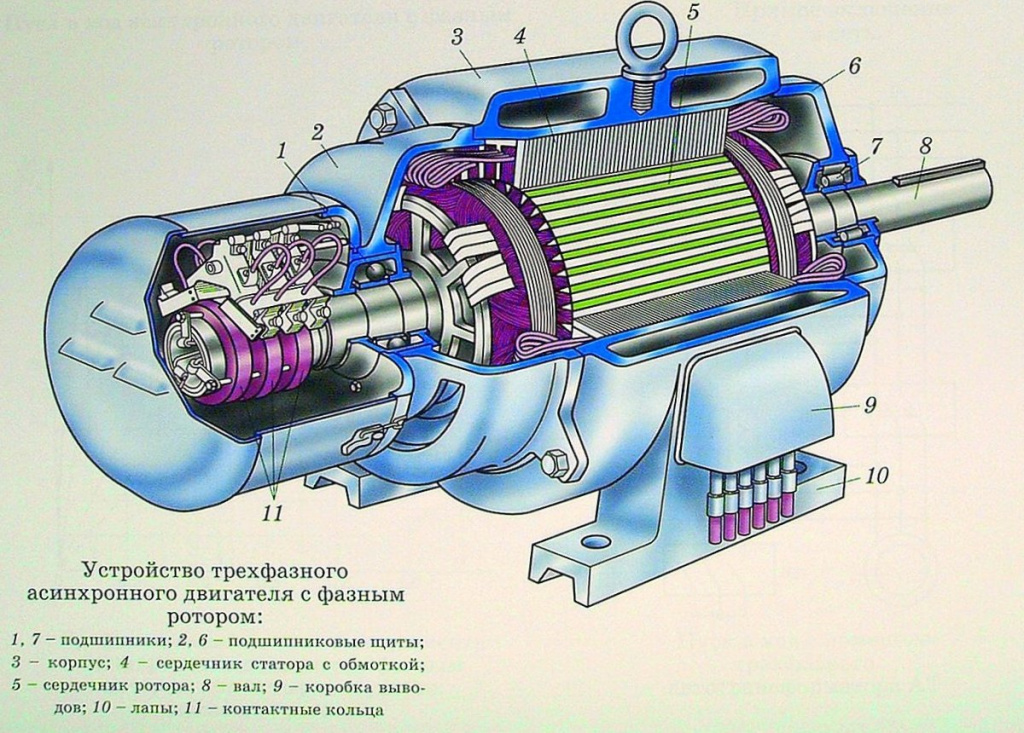
Мотор Давенпорта ничем не примечателен в историческом контексте. Его конструкция не является существенным улучшением других современных конструкций.
За прошедшие годы Давенпорт произвел немало машин. Но в отличие от Вернера Сименса, Джорджа Вестингауза и Томаса Эдисона он не был основателем крупной компании. И в отличие, например, от Николы Теслы, Томас Дэвенпорт никогда не мог ни продать, ни лицензировать свой патент.
Давенпорт получил патент не на электродвигатель как таковой, а только на его особенности конструкции. В период с 1837 по 1866 год около 100 патентов на электрические двигатели были выданы другим изобретателям только в Англии. После того, как Давенпорт модернизировал свой мотор уже в 1837 году, его патент стал практически бесполезным.
Давенпорт имеет честь быть первым из тысяч инженеров, получивших патент на электродвигатель. Но он не является их изобретателем, и его конструкции не оказали существенного влияния на дальнейшее развитие электродвигателей.

Расписание 1838–1854: Мощные двигатели, новые приложения
| Февр. 1838 | Уоткинс публикует обширную статью в Философском журнале , в которой он представляет свой двигатель. | Мотор Уоткина, февраль 1838 г. Философский журнал, 1838 г., том. 12, пл. 4 |
| Август 1838 | В августе 1838 года в Лондоне выставлена крошечная модель поезда с одним из двигателей Давенпорта. Он движется со скоростью 3 мили в час. | Модель поезда Давенпорта, 1838 Фото предоставлено Отделом труда и промышленности Национального музея американской истории Смитсоновского института.  |
| Сентябрь 1838 | Якоби переезжает в Санкт-Петербург в августе 1838 года по просьбе русского царя. Он был принят в Санкт-Петербургскую академию наук и щедро поддержан царем в его дальнейшей работе над электродвигателями. 13 сентября 1838 года Якоби впервые демонстрирует на Неве электролодку длиной около 8 м с гребными колесами. Цинковые батареи имели 320 пар пластин и весили 200 кг. Их размещают вдоль двух боковых стенок сосуда. Мощность двигателя составляет от 1/5 до 1/4 л.с. (300 Вт), катер движется со скоростью 2,5 км/ч по маршруту длиной 7,5 км. Он может перевозить более десятка пассажиров. Якоби целыми днями ездит по Неве. В современных газетных статьях говорится, что после двух-трех месяцев работы потребление цинка составило 24 фунта. | Усовершенствованный мотор Якоби, 1838 г.  |
| 1838 | Чарльз Г. Страница (американец) всю жизнь занимается электродвигателями. В течение следующих 20 лет Пейдж проводит исследования, чтобы найти лучшие и более мощные машины. Его двигатели продавались по каталогу в США и достигли высокого уровня осведомленности общественности. В первые годы многие изобретатели электродвигателей имитировали паровые двигатели с колеблющимся (возвратно-поступательным) поршнем. Пейдж тоже строит такую машину (см. справа), но потом переходит к вращающимся устройствам.
| Первый двигатель Page, 1838 American Journal of Science , 1838, vol. 35, с. 264 |
| Август 1839 | 8 августа Якоби испытывает улучшенный электродвигатель с механическими характеристиками, в три-четыре раза превышающими его вторую машину 1838 года (около 1 кВт).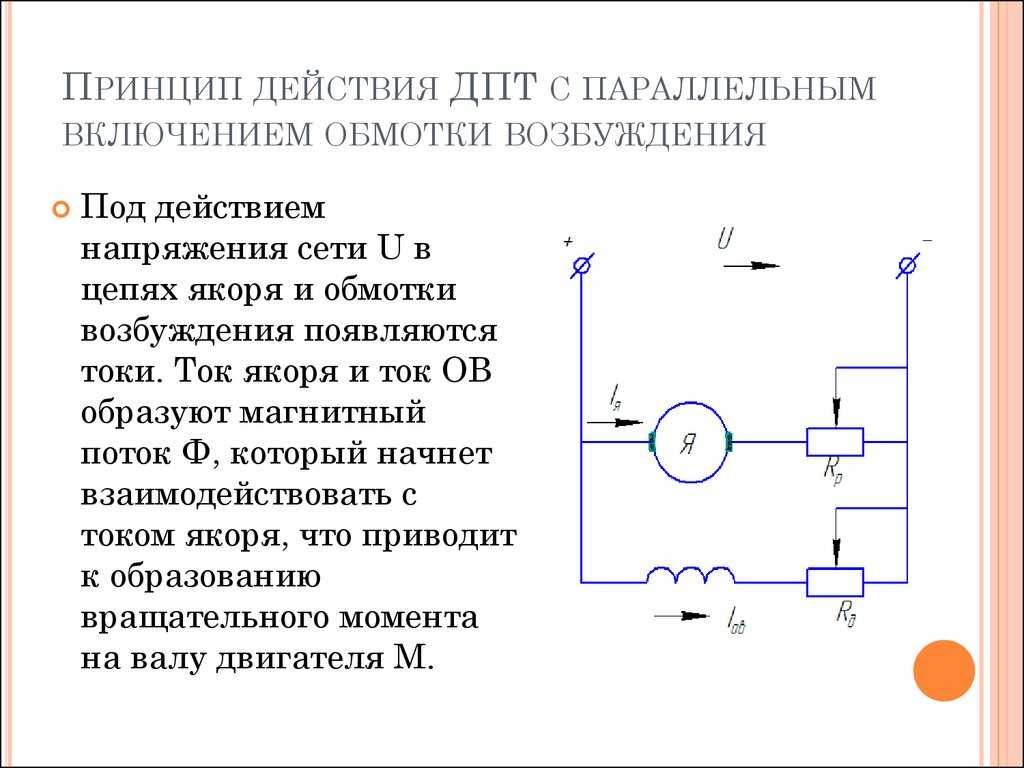 Его лодка теперь достигает скорости 4 км/ч. Ключевым фактором его успеха является улучшенная цинково-платиновая батарея по словам Уильяма Роберта Гроува, которую он сделал сам. Его лодка теперь достигает скорости 4 км/ч. Ключевым фактором его успеха является улучшенная цинково-платиновая батарея по словам Уильяма Роберта Гроува, которую он сделал сам.В октябре 1841 г. Якоби снова демонстрирует улучшенный двигатель, который, однако, лишь немного превосходит модель 1839 г. Это последний электродвигатель, когда-либо построенный Якоби. Теперь он обращается к теории электродвигателей, а затем переходит к другим электрическим явлениям. |
| 1837- 1842 | Роберт Дэвидсон (шотландский) также разрабатывал электродвигатели с 1837 года. Он изготовил несколько приводов для токарного станка и модельных автомобилей. В 1839 году Дэвидсон руководит строительством первого автомобиля с электроприводом. В сентябре 1842 года он совершает пробные рейсы 5-тонного локомотива длиной 4,8 м на железнодорожной линии из Эдинбурга в Глазго. | Первый электровоз Дэвидсона, 1839 г. Из Т. дю Монсель, Электричество как движущая сила , Лондон, 1883, рис. 32 |
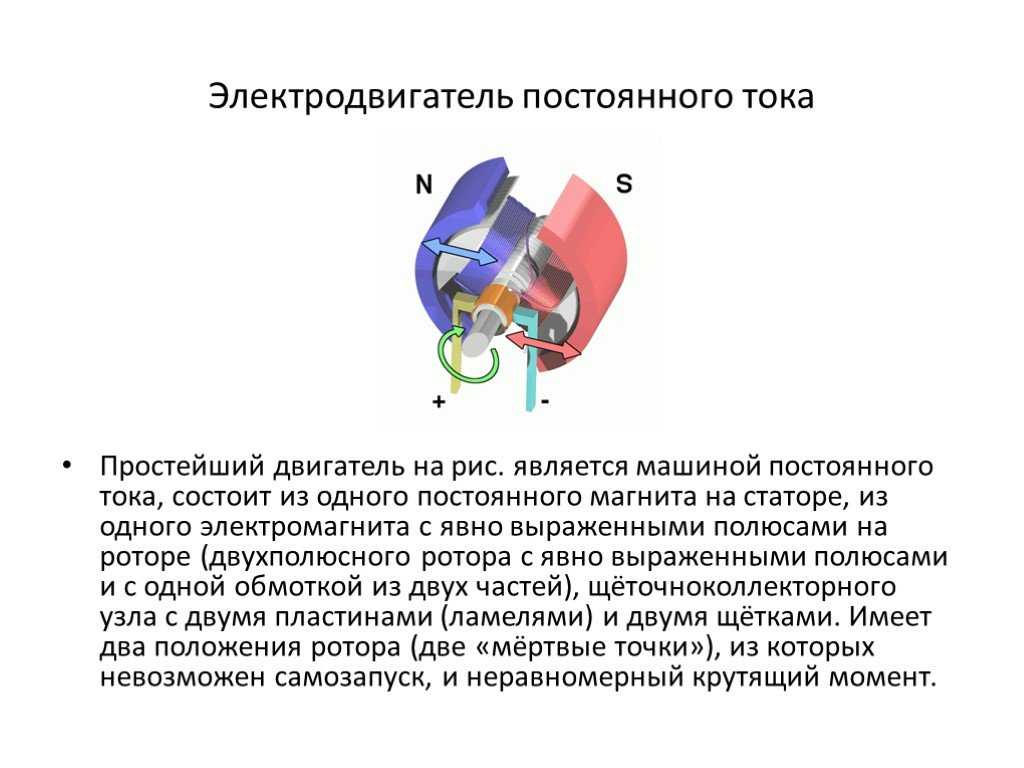 Его двигатель развивает мощность около 1 л.с. (0,74 кВт) и развивает скорость 4 мили в час (6,4 км/ч).
Его двигатель развивает мощность около 1 л.с. (0,74 кВт) и развивает скорость 4 мили в час (6,4 км/ч). В последующие годы начинается поток патентов на электромагнитные машины — около 100 только в Англии между 1837 и 1866 гг. (англ., род. 1838), Урайа Кларк (род. 1840), Томас Райт (род. 1840), Уитстон (англ., род. 1841), де Гарлем (род. 1841), П. Элиас (американец, род. 1842), Г. Фромент (французский, род. 1844), Мозес Г. Фармер (американец, род. 1846), Г. К. Колтон (американец, род. 1847), Хьорт (род. 1849).), Томас Холл (американец, род. 1850), Т. К. Эйвери (род. 1851), Сёрен Хьорт (датчанин, род. 1851), Дю Монсель (француз, род. 1851), Мари Дэви (француз, род. 1855), Пачинотти (итальянец) , 1861 г.р.)
и другие.
Изначально идет соревнование между колебательными (возвратно-поступательными) и роторными машинами. Позже колебательные машины полностью исчезают из поля зрения.
Фундаментальная проблема ранних электродвигателей заключается в том, что электрический ток от гальванических элементов (цинковых батарей) слишком дорог, чтобы конкурировать с паровыми двигателями. Р. Хант сообщил в 1850 г. в British Philosophical Magazine , что электроэнергия даже в самых лучших условиях в 25 раз дороже паровой машины. Только с продолжающимся развитием электрического генератора (динамо) ситуация начинает меняться.
| 1840 | 18 января 1840 года выходит первый номер новой газеты Давенпорта, Electro Magnet and Mechanics Intelligencer . Печатный станок приводится в движение двумя его собственными двигателями. Моторы делают предположительно около 2 л.с., что составляет около 1,5 кВт. |
| 1841- 1844 | По инициативе Вагнера, Германская Конфедерация под руководством Пруссии, Баварии и Австрии назначает в 1841 году премию в 100 000 гульденов за постройку электрической машины, мощность которой дешевле лошадиной, паровой или человеческой сила. Конечно, эта цена привлекает других изобретателей, которые параллельно с Вагнером начинают работать над электродвигателем. Среди них г-н Карл Людвиг Althans из Бюкебурга недалеко от Миндена, Emil Stöhrer из Лейпцига, Emil Groos из Карлсруэ и Peter Bauer из Нюрнберга. В частности, в 1843 году Штёрер проектирует замечательную машину. При исследовании последней вагнеровской машины в мае и июне 1844 года во Франкфурте-на-Майне федеральная комиссия определила мощность всего 50 Вт. Без мощного электрогенератора это соревнование было бы невозможно выиграть, а такого генератора человечеству пришлось ждать еще 25 лет. |
| 1851 | Страница увеличивает мощность двигателей с 8 до 20 л.с. С двумя двигателями он управляет 10-тонным локомотивом с максимальной скоростью 30 км/ч. Он путешествует по маршруту из Вашингтона в Бладенбург в 19минут. |
| 1854 | Еще один 12-тонный локомотив Пейджа едет по маршруту из Балтимора в Огайо. |
 Потребление цинка настолько велико, что лошадь, пар и рабочая сила значительно дешевле. Из-за этой неудачи с Вагнера удерживается цена, и он лишается благодати.
Потребление цинка настолько велико, что лошадь, пар и рабочая сила значительно дешевле. Из-за этой неудачи с Вагнера удерживается цена, и он лишается благодати. .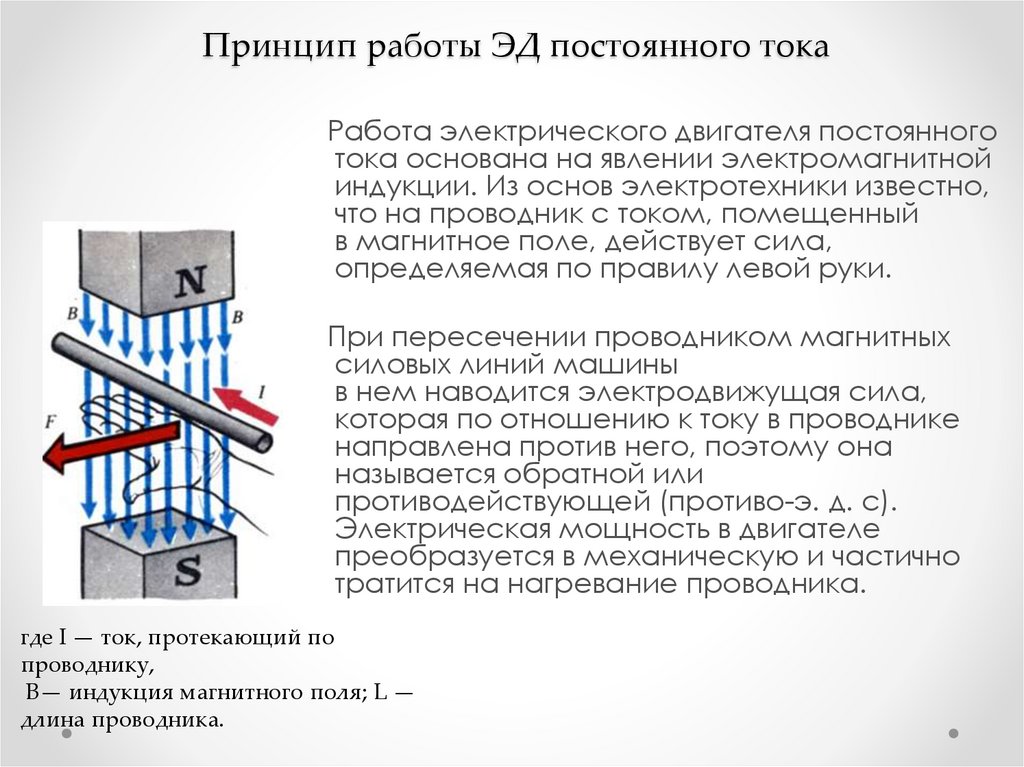 .. подробнее во второй части.
.. подробнее во второй части.
Электродвигатель: физика, эффективность и типы
Большинство из нас используют электродвигатели каждый день; питание электрической зубной щетки по утрам, вращение вентиляторов для охлаждения компьютера или запуск двигателя в автомобиле. Эти устройства преобразуют электрическую энергию в механическую и делают это с помощью всего одной движущейся части! В этой статье объясняются основные принципы работы электродвигателя, его компоненты, а также некоторые распространенные типы и области применения электродвигателей.
Электродвигатель Определение
Электродвигатель — это электромеханическое устройство, которое преобразует входную электрическую энергию в выходную механическую энергию. В двигателях постоянного тока это достигается в первую очередь за счет взаимодействия стационарного магнитного статора и электромагнитного ротора, создающего силу, это известно как моторный эффект.
Провод, по которому течет ток, создает магнитное поле вокруг провода.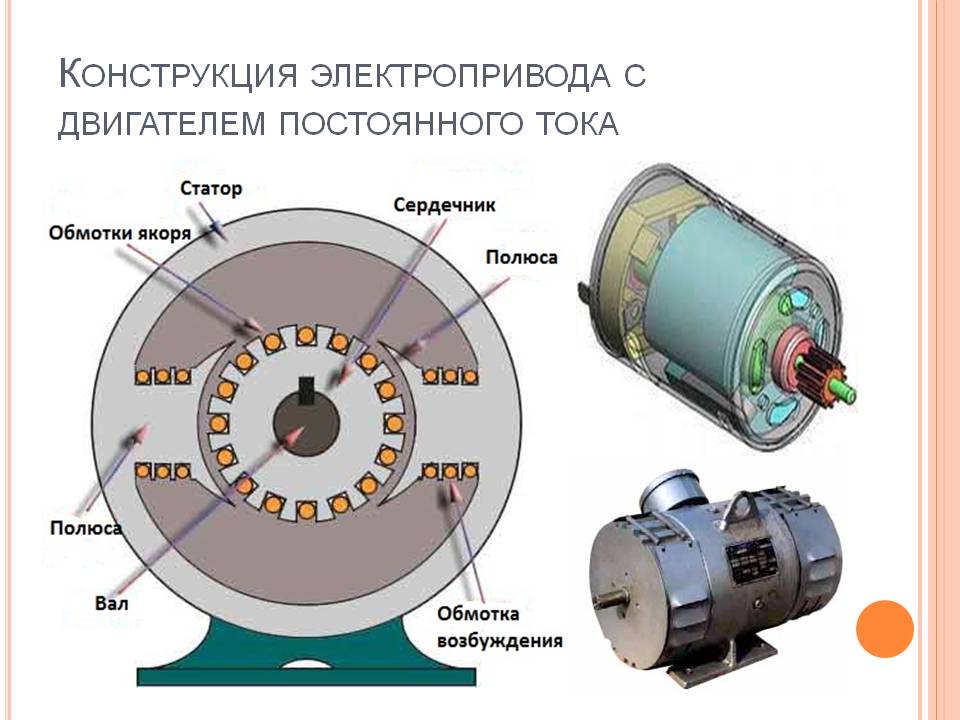 Когда это электромагнитное поле взаимодействует с другим магнитным полем, создаваемым постоянным магнитом или электромагнитом, на провод действует сила.
Когда это электромагнитное поле взаимодействует с другим магнитным полем, создаваемым постоянным магнитом или электромагнитом, на провод действует сила.
Величина силы зависит от напряженности постоянного магнитного поля, длины провода, проходящего через поле, и силы тока, определяемой уравнением моторного эффекта. Двигательный эффект наиболее силен, когда провод / ток и магнитное поле находятся под углом 90 ° друг к другу, при этом сила эффекта уменьшается до нуля, если провод и магнитное поле параллельны.
(слева) Схема моторного эффекта, показывающая взаимодействие провода с током с магнитным полем, создающим силу на проводе. (справа) Левосторонний инструмент Флеминга — способ определения направления силы на проволоке. Изучайте умные оригиналы.
сила в ньютонах
плотность магнитного потока в теслах
сила тока в амперах
длина проводника в метрах с помощью которого можно легко определить направление силы, действующей на проводник с током в магнитном поле.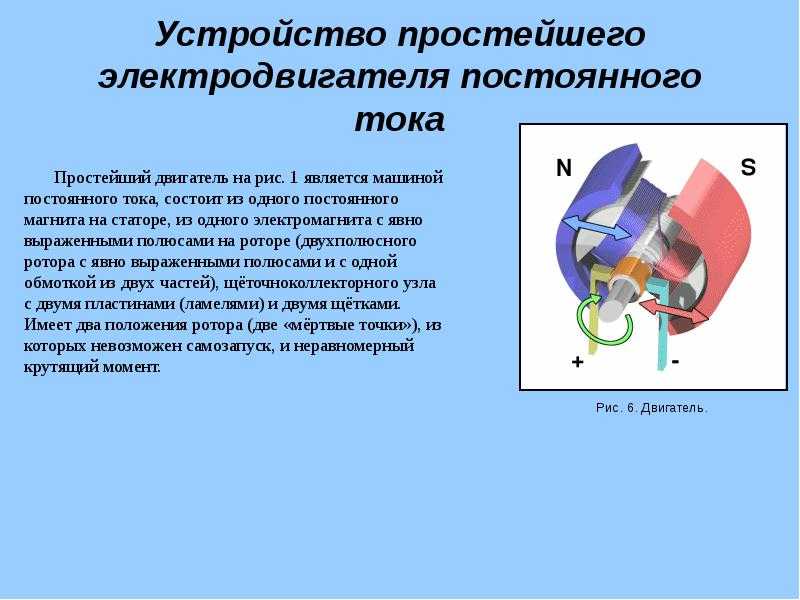 Используя левую руку, держите большой, указательный и средний пальцы под прямым углом друг к другу, как показано выше. Затем укажите указательным пальцем в направлении магнитного поля (с севера на юг), а средним пальцем в направлении тока (+ к -). Затем ваш большой палец указывает в направлении результирующей силы на проводе!
Используя левую руку, держите большой, указательный и средний пальцы под прямым углом друг к другу, как показано выше. Затем укажите указательным пальцем в направлении магнитного поля (с севера на юг), а средним пальцем в направлении тока (+ к -). Затем ваш большой палец указывает в направлении результирующей силы на проводе!
Типы электродвигателей
Существует бесчисленное множество вариантов конструкции электродвигателя для различных применений, но они делятся на две основные категории: двигатели переменного тока (AC) и двигатели постоянного тока (DC).
Двигатели постоянного тока
Простейшая форма двигателя постоянного тока состоит из стационарного магнитного поля и проводящей катушки, соединенной с коммутатором с разъемным кольцом, который подключается к источнику питания постоянного тока через щетки. На приведенной ниже диаграмме показан двигатель этого типа в исходном положении.
Схема, показывающая компоненты очень простого двигателя постоянного тока и то, как они создают вращательную силу вокруг оси двигателя. Росс Макдональд, StudySmarter Originals.
Росс Макдональд, StudySmarter Originals.
Теперь давайте пошагово рассмотрим, как работает двигатель постоянного тока:
Когда на щетки подается напряжение, коммутатор с разъемным кольцом передает это напряжение на катушку, которая создает ток в катушке. Катушка с током находится в магнитном поле, поэтому эффект двигателя создает противоположную силу на каждой стороне катушки, поскольку ток течет в противоположных направлениях. Это создает вращающую силу на катушке, и в этом примере двигатель начинает вращаться против часовой стрелки.
После поворота на 90 градусов от исходного положения коммутатор с разъемным кольцом меняет направление тока на обратное. Это приводит к тому, что сторона катушки в верхней части вращения теперь испытывает силу, направленную вниз, а сторона катушки в нижней части двигателя испытывает силу, направленную вверх. В сочетании с импульсом от начального вращения это продолжает ускорять катушку при вращении против часовой стрелки.

После поворота еще на 180° коммутатор с разъемным кольцом снова меняет направление тока и направление сил, действующих на катушку. Это ускоряет катушку на следующем полуобороте, и эта последовательность продолжается, пока двигатель вращается.
Коллектор с разъемным кольцом используется для надежного переключения направления тока в катушке с той же скоростью, что и двигатель. Как видно на схеме выше, коммутатор с разъемным кольцом состоит из двух полуцилиндрических проводников, прикрепленных к каждому концу катушки двигателя. Щетки проводят ток от источника питания на две половины коллектора с разъемным кольцом.
Когда двигатель вращается, коллектор с разрезным кольцом вращается вместе с ним. Поскольку щетки остаются неподвижными, это приводит к тому, что каждая сторона коллектора с разрезным кольцом контактирует с положительной щеткой на один полуоборот, а с отрицательной щеткой на другой полуоборот. Это приводит к тому, что полярность напряжения, подаваемого со щеток на катушку, меняется каждые пол-оборота, а также меняет направление тока.
Поскольку щетки и коллектор с разрезным кольцом работают при помощи физического скользящего контакта, часто это первая часть двигателя постоянного тока, которую необходимо заменить по мере износа щеток.
Существует три основных подхода к увеличению мощности двигателя постоянного тока:
Увеличение силы магнитного поля. Это увеличивает член в уравнении моторного эффекта, создавая большую силу на катушке.
Добавление дополнительных витков (петлей) в катушку. Это увеличивает общую длину катушки, увеличивая член в уравнении моторного эффекта и создавая большую силу.
Использование более высокого тока в катушке. Это увеличивает член в уравнении двигательного эффекта, создавая большую силу.
Производительность также можно улучшить, добавив железный сердечник к ротору электромагнита, как показано на более типичном двигателе постоянного тока ниже.
Схема типичного двигателя постоянного тока, показывающая катушку ротора с множеством контуров и железным сердечником для повышения производительности.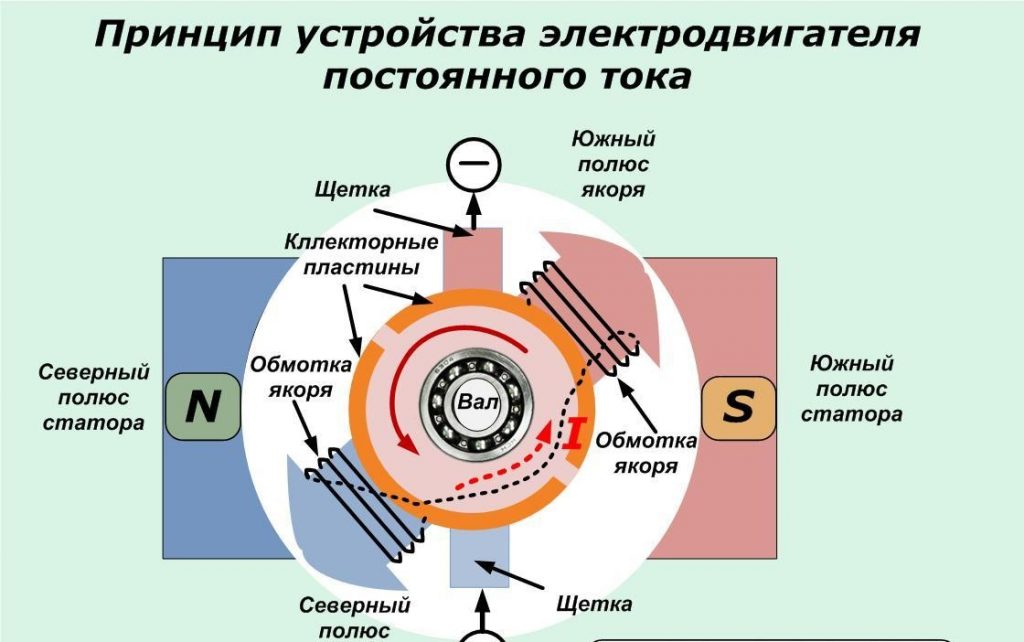 Википедия.
Википедия.
Бесщеточный двигатель постоянного тока более совершенным типом. Как следует из названия, основное отличие этого типа двигателя заключается в том, что он не имеет коллектора с разрезным кольцом или щеточных компонентов. Вместо этого полярность напряжения питания постоянного тока изменяется в цифровом виде с помощью полупроводникового контроллера. Преимущество этого заключается в повышенной надежности, поскольку щетки в щеточных двигателях часто изнашиваются и требуют замены, а также в целом обеспечивает лучшую производительность.
Двигатели переменного тока
Двигатели переменного тока работают по тому же принципу, что и двигатели постоянного тока, но с некоторыми ключевыми отличиями. Как правило, обмотки катушки образуют статор (неподвижную часть) двигателя, а ротор представляет собой постоянный магнит или электромагнит.
В источнике питания переменного тока напряжение меняется синусоидально от положительного к отрицательному, как показано ниже.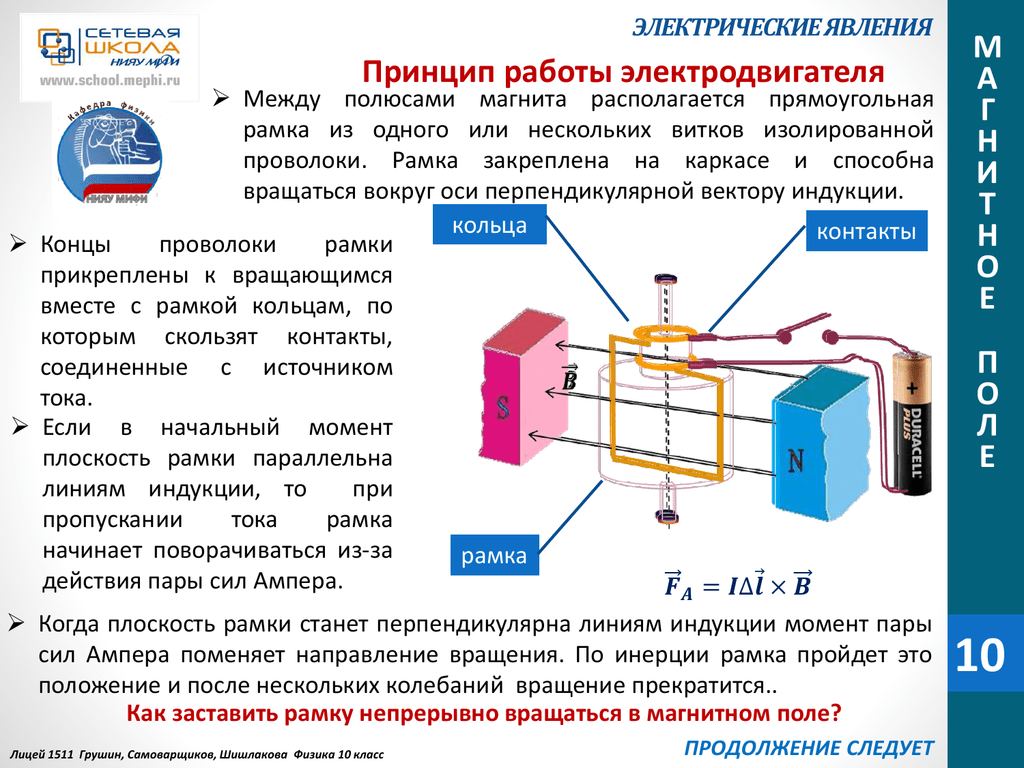 Когда переменное напряжение подается на обмотки катушки статора электромагнита, переменное напряжение создает переменное магнитное поле. В двигателе переменного тока это переменное магнитное поле используется для создания вращающей силы на роторе и вращения двигателя. Коммутатор с разъемным кольцом больше не нужен, так как направление тока меняется на противоположное при подаче переменного тока.
Когда переменное напряжение подается на обмотки катушки статора электромагнита, переменное напряжение создает переменное магнитное поле. В двигателе переменного тока это переменное магнитное поле используется для создания вращающей силы на роторе и вращения двигателя. Коммутатор с разъемным кольцом больше не нужен, так как направление тока меняется на противоположное при подаче переменного тока.
(Вверху) — Синусоидальное изменение напряжения в сети переменного тока. (Внизу) — Соответствующая сила и направление магнитного поля, создаваемого электромагнитом с приложенным переменным напряжением. Росс Макдональд, StudySmarter Originals
Функции электродвигателей
Электродвигатели используются в бесчисленных устройствах, с которыми мы взаимодействуем каждый день. В бытовых устройствах обычно используется двигатель постоянного тока, если они питаются от батареи, и двигатель переменного тока, если они питаются от сети. Это делается для того, чтобы избежать преобразования источника питания с переменного тока на постоянный или наоборот, что снизит эффективность и увеличит стоимость из-за необходимых дополнительных компонентов. Ниже вы можете увидеть применение двигателей постоянного и переменного тока в повседневном использовании.
Ниже вы можете увидеть применение двигателей постоянного и переменного тока в повседневном использовании.
Household DC Motors :
- Electric toothbrush
- Laptop cooling fan
- Remote-controlled car
- Battery-powered drill
- Vibration motor in a game controller
- Car starter motor
Household AC Motors :
- Вытяжка
- Кухонный миксер
- Пылесос
- Стиральная машина
- Микроволновая печь
Расчет мощности электродвигателя
При расчете мощности электродвигателя необходимо учитывать две переменные: выходную мощность и входную мощность.
Выходная мощность электродвигателя Поскольку мощность равна энергии в секунду, мы можем рассчитать выходную механическую мощность двигателя, измерив время, необходимое для выполнения известного объема работы. В простом эксперименте для этого можно было бы использовать двигатель, поднимающий массу, наматывая ее на веревку.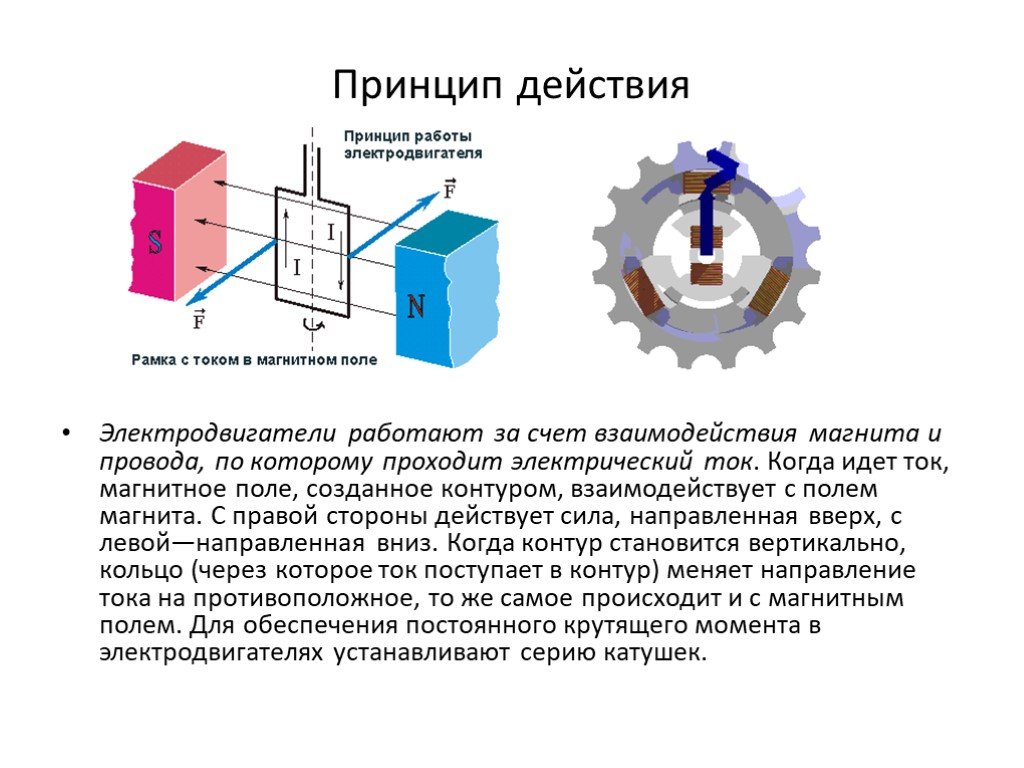
Мы знаем, что выполненная работа равна силе, умноженной на расстояние, на котором она приложена:
Механическая мощность двигателя (то есть выходная мощность двигателя) находится путем деления количества выполненной полезной работы на количество секунд, затраченных на выполнение этой работы.
Потребляемая мощность электродвигателяПотребляемая мощность электродвигателя может быть найдена с помощью общего уравнения электрической мощности. Обратите внимание, что это можно сделать, потому что входная мощность электродвигателя представляет собой электрическую мощность.
КПД электродвигателя
Эффективность устройства — это способ измерения того, сколько вложенной энергии преобразуется в полезную выходную энергию. Общая формула КПД устройства:
Для электродвигателя входная мощность электрическая, а выходная мощность механическая. Основным источником ненужной энергии в электродвигателе является тепло – оно производится как электрическим сопротивлением катушек проволоки, так и трением между движущимися и неподвижными компонентами.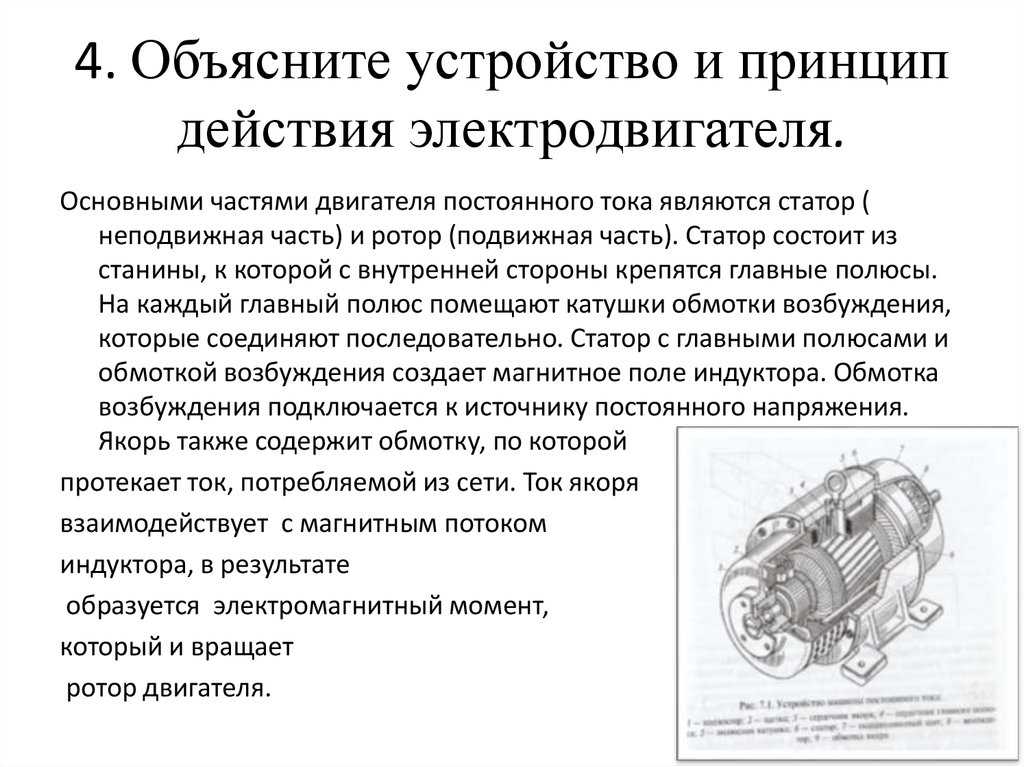
КПД двигателя можно рассчитать, разделив полезную выходную механическую мощность на общую потребляемую электрическую мощность. Это преобразуется в процентную эффективность путем умножения на 100.
Поднятие веса на вертикальное расстояние требует работы. Двигатель тянет на на , чтобы поднять вес. Найти:
- Входная мощность двигателя.
- Выходная мощность двигателя.
- КПД двигателя.
Потребляемая мощность
Потребляемая мощность двигателя находится путем умножения напряжения на потребляемый ток:
Выходная мощность
Выходная мощность двигателя находится путем подсчета объема работы выполняется за время (в секундах), затраченное на выполнение работы:
КПД двигателя
КПД двигателя рассчитывается путем нахождения доли входной мощности, которая преобразуется двигателем в полезную выходную мощность. Чтобы найти КПД в процентах, умножаем соотношение на 100:
Чтобы найти КПД в процентах, умножаем соотношение на 100:
Электродвигатели – основные выводы
- Электродвигатели работают благодаря явлению, называемому моторным эффектом. Двигательный эффект — это сила, действующая на проводник с током, когда он проходит через магнитное поле.
- Силу взаимодействия можно увеличить, увеличив либо напряженность магнитного поля, ток в проводе, либо длину провода в магнитном поле.
- В двигателе постоянного тока используется коммутатор с разъемным кольцом для изменения направления тока в проволочной катушке каждые пол-оборота. Это гарантирует, что сила, действующая на проволочную катушку, всегда продолжает ускорять вращение катушки и раскручивать двигатель.
- Двигатель переменного тока также использует эффект двигателя для вращения, но использует источник питания переменного тока для изменения направления тока вместо коммутатора с разъемным кольцом. Обычно двигатели переменного тока имеют обмотку катушки в статоре и ротор с постоянным магнитом или электромагнитом.
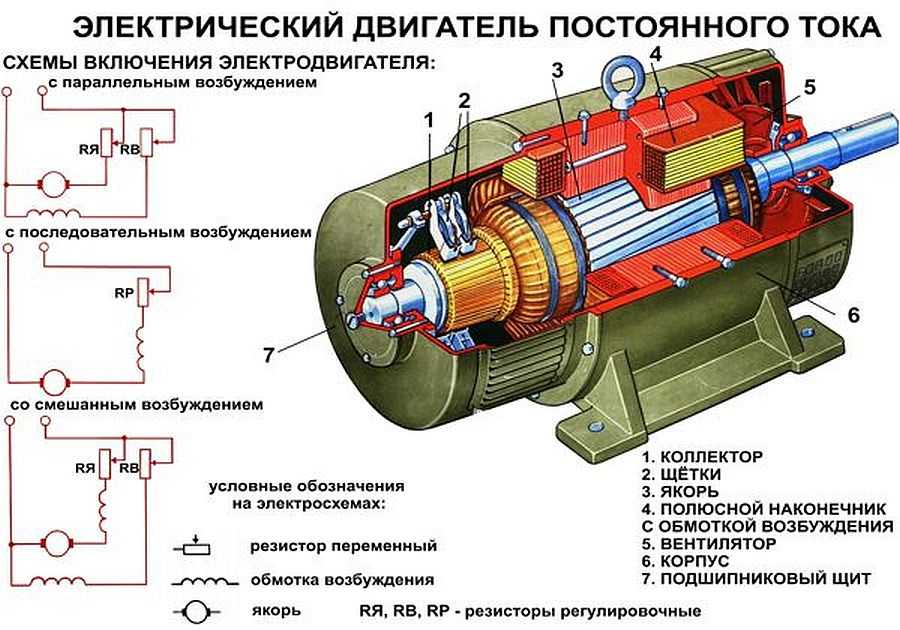
- КПД электродвигателя можно рассчитать, измерив, сколько входной энергии необходимо для выполнения известного объема работы.
Как работают двигатели и как правильно выбрать двигатель для любого проекта
Двигатели можно найти практически везде. Это руководство поможет вам узнать об электродвигателях, доступных типах и о том, как правильно выбрать двигатель. Основные вопросы, на которые необходимо ответить при принятии решения о том, какой двигатель наиболее подходит для применения, — это какой тип выбрать и какие технические характеристики имеют значение.
Как работают двигатели?
Электродвигатели работают путем преобразования электрической энергии в механическую для создания движения. Сила создается в двигателе за счет взаимодействия между магнитное поле и обмотка переменного (AC) или постоянного (DC) тока. С увеличением силы тока увеличивается и сила магнитного поля. Помните о законе Ома (V = I*R); напряжение должно увеличиваться, чтобы поддерживать тот же ток, когда сопротивление увеличивается.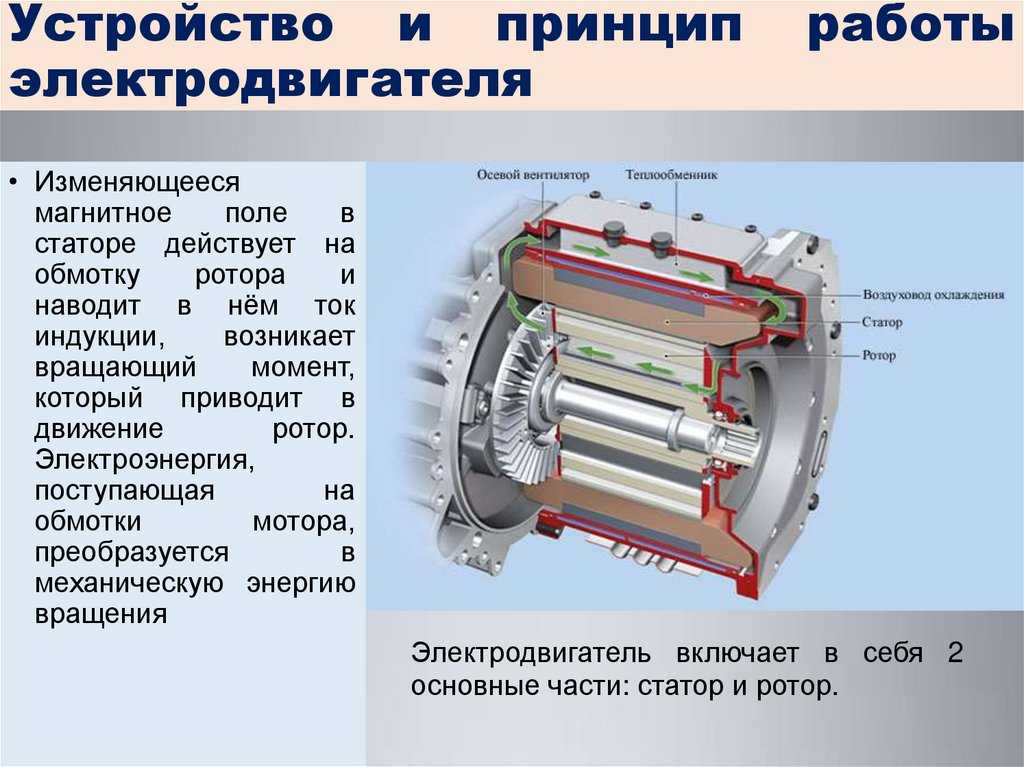
Электродвигатели имеют множество применений. Традиционное промышленное использование включает воздуходувки, станки и электроинструменты, вентиляторы и насосы. Любители обычно используют двигатели в небольших приложениях, требующих движения, таких как робототехника или модули с колесами.
Типы двигателей:
Существует множество типов двигателей постоянного тока , но наиболее распространенными являются щеточные или бесщеточные. Существуют также вибрационные двигатели, шаговые двигатели и серводвигатели. Щеточные двигатели постоянного тока являются одними из самых простых и используются во многих бытовых приборах, игрушках и автомобилях. Они используют контактные щетки, которые соединяются с коммутатором для изменения направления тока. Они недороги в производстве, просты в управлении и обладают отличным крутящим моментом на низких скоростях (измеряется в оборотах в минуту или об/мин). Несколько недостатков заключаются в том, что они требуют постоянного обслуживания для замены изношенных щеток, имеют ограниченную скорость из-за нагрева щеток и могут генерировать электромагнитный шум из-за дугового разряда щеток.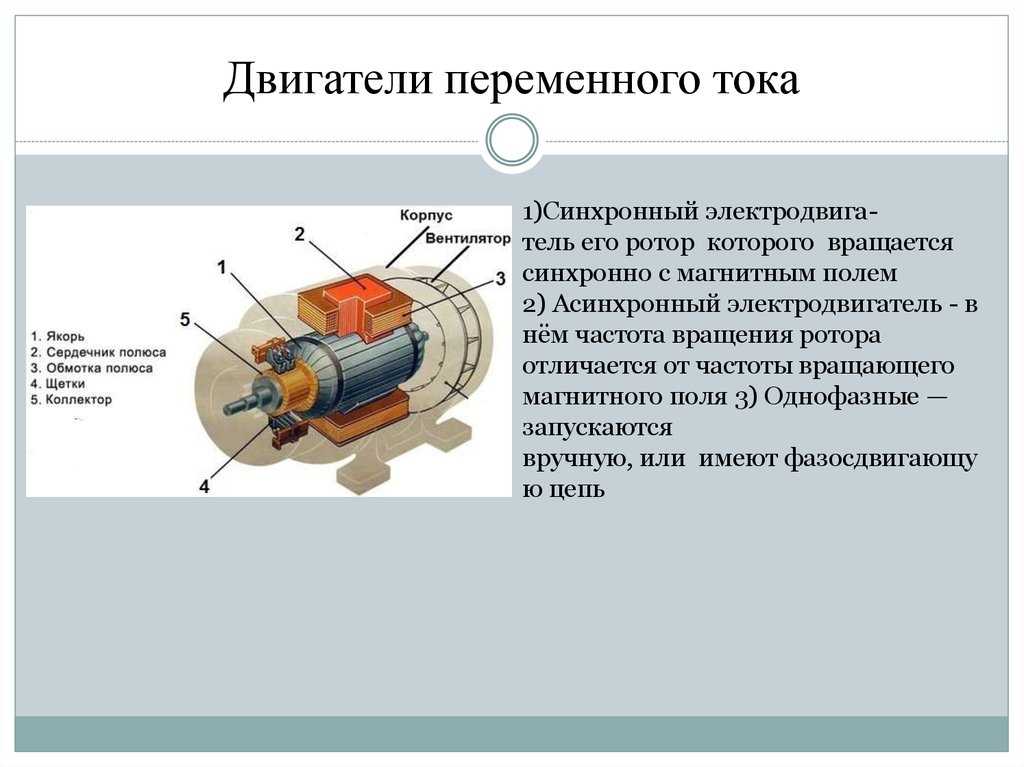
Щеточный двигатель постоянного тока
Бесщеточные двигатели постоянного тока используют постоянные магниты в своем роторном узле. Они популярны на рынке хобби для самолетов и наземных транспортных средств. Они более эффективны, требуют меньше обслуживания, производят меньше шума и имеют более высокую удельную мощность, чем коллекторные двигатели постоянного тока. Они также могут производиться серийно и напоминают двигатель переменного тока с постоянным числом оборотов в минуту, за исключением того, что они питаются от постоянного тока. Однако есть несколько недостатков, в том числе то, что ими трудно управлять без специального регулятора, и они требуют низких пусковых нагрузок и специальных редукторов в приводных приложениях, что приводит к более высоким капитальным затратам, сложности и экологическим ограничениям.
Бесщеточный двигатель постоянного тока
Вибрационные двигатели используются для приложений, требующих вибрации, таких как мобильные телефоны или игровые контроллеры. Они генерируются электродвигателем и имеют неуравновешенную массу на приводном валу, которая вызывает вибрацию. Их также можно использовать в неэлектронных зуммерах, которые вибрируют для подачи звука или для сигналов тревоги или дверных звонков.
Они генерируются электродвигателем и имеют неуравновешенную массу на приводном валу, которая вызывает вибрацию. Их также можно использовать в неэлектронных зуммерах, которые вибрируют для подачи звука или для сигналов тревоги или дверных звонков.
Вибрационный двигатель
Когда требуется точное позиционирование, 9Шаговые двигатели 0108 — ваш друг. Они используются в принтерах, станках и системах управления технологическими процессами и рассчитаны на высокий удерживающий момент, что дает пользователю возможность переходить от одного шага к другому. У них есть система контроллера, которая определяет положение с помощью сигнальных импульсов, отправляемых драйверу, который интерпретирует их и отправляет пропорциональное напряжение на двигатель. Они относительно просты в изготовлении и управлении, но они постоянно потребляют максимальный ток. Небольшое расстояние между шагами ограничивает максимальную скорость, и при высоких нагрузках шаги можно пропускать.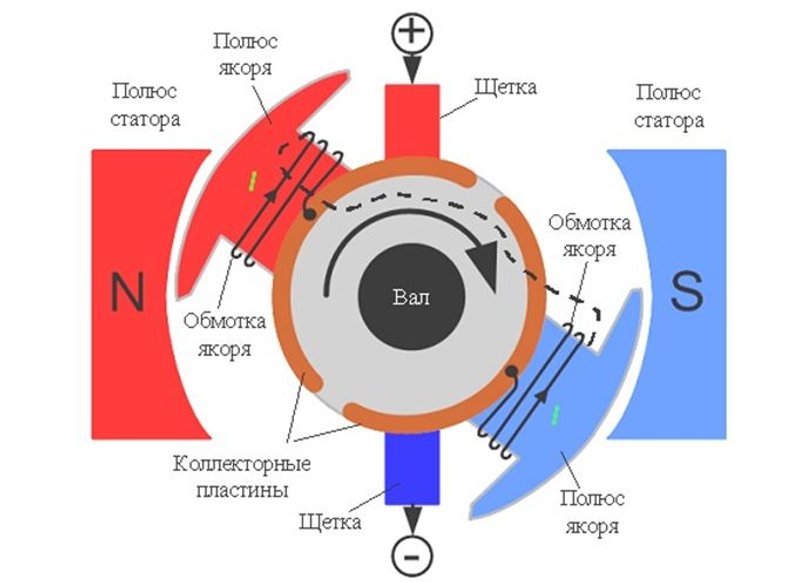
Шаговый двигатель
Серводвигатели — еще один популярный двигатель на рынке хобби, который используется для управления положением без точности. Их популярные приложения включают приложения дистанционного управления, такие как игрушечные радиоуправляемые автомобили и робототехника. Они состоят из двигателя, потенциометра и схемы управления и в основном управляются с помощью широтно-импульсной модуляции (ШИМ) путем отправки электрических импульсов на провод управления. Сервоприводы могут быть как переменного, так и постоянного тока. Сервоприводы переменного тока могут выдерживать более высокие скачки тока и используются для промышленного оборудования, тогда как сервоприводы постоянного тока предназначены для небольших любительских приложений. Чтобы узнать больше о сервоприводах, ознакомьтесь с нашими Как работают серводвигатели статья.
Существует три основных типа двигателей переменного тока: асинхронные, синхронные и промышленные.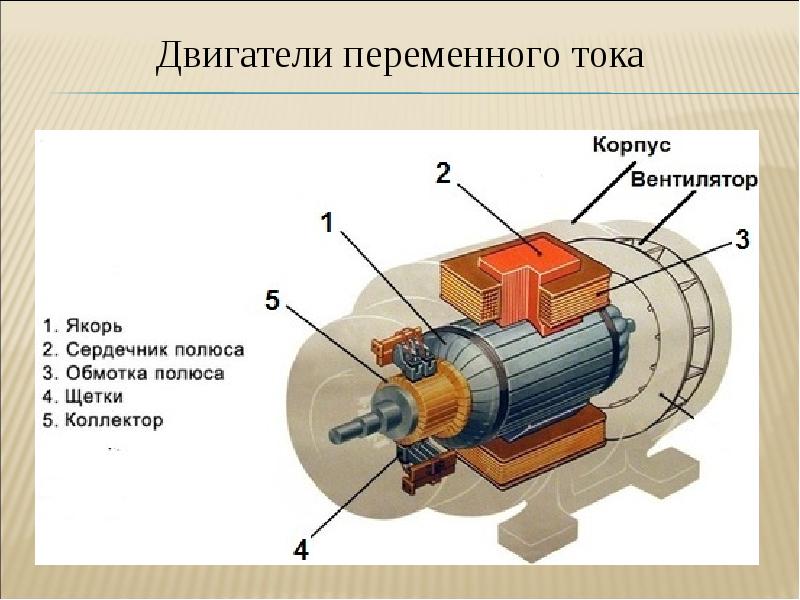
Асинхронные двигатели называются асинхронными двигателями, поскольку они не вращаются с одинаковой постоянной скоростью или вращаются медленнее, чем заданная частота. Скольжение , разница между фактической и синхронной скоростью, необходимо для создания крутящего момента , крутящей силы, вызывающей вращение, в асинхронных двигателях. Магнитное поле, окружающее ротор этих двигателей, вызвано наведенным током.
Ротор синхронных двигателей вращается с постоянной скоростью при подаче переменного тока. Их магнитное поле создается постоянными магнитами. Промышленные двигатели предназначены для трехфазных систем большой мощности, таких как конвейеры или воздуходувки. Двигатели переменного тока также можно найти в бытовой технике и других устройствах, таких как часы, вентиляторы и дисководы.
На что обратить внимание при покупке двигателя:
Есть несколько характеристик, на которые необходимо обратить внимание при выборе двигателя, но наиболее важными являются напряжение, ток, крутящий момент и скорость (об/мин).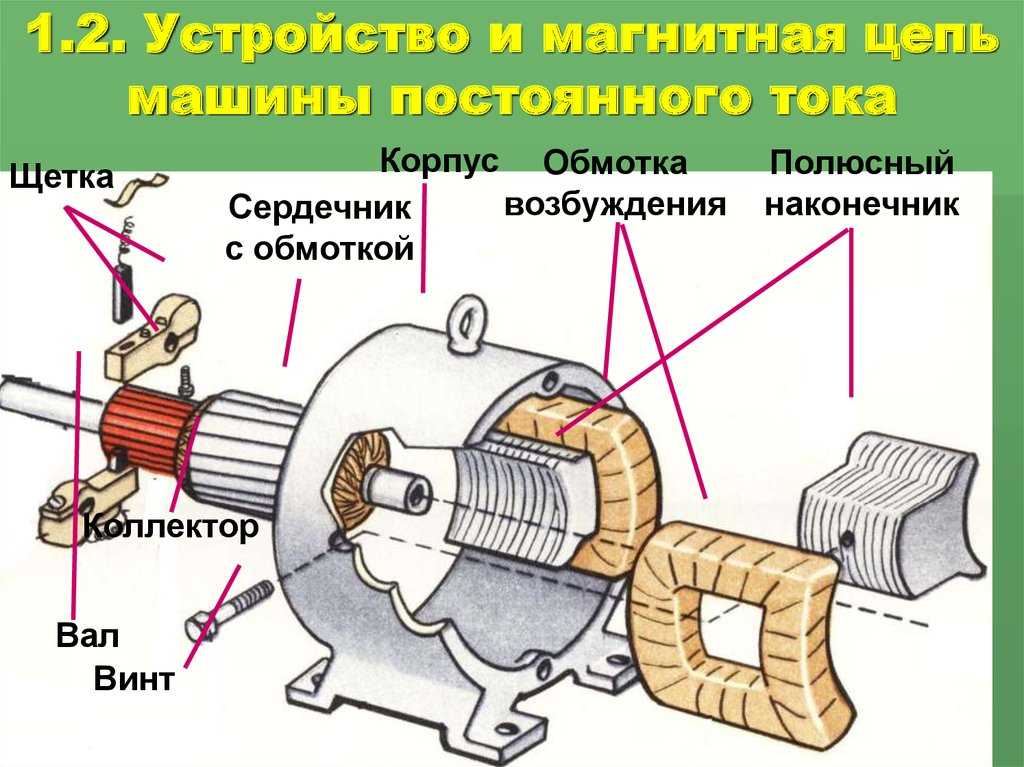
Ток питает двигатель, и слишком большой ток может повредить двигатель. Для двигателей постоянного тока важны рабочий ток и ток останова. Рабочий ток — это среднее значение тока, которое двигатель должен потреблять при обычном крутящем моменте. Ток останова прикладывает достаточный крутящий момент, чтобы двигатель работал на скорости останова или 0 об/мин. Это максимальный ток, который должен потреблять двигатель, а также максимальная мощность, умноженная на номинальное напряжение. Радиаторы важны, если двигатель постоянно работает или работает при напряжении выше номинального, чтобы предотвратить плавление катушек.
Напряжение используется для поддержания протекания чистого тока в одном направлении и для преодоления обратного тока. Чем выше напряжение, тем выше крутящий момент. Номинальное напряжение двигателя постоянного тока указывает наиболее эффективное напряжение во время работы. Обязательно примените рекомендуемое напряжение. Если вы приложите слишком мало вольт, двигатель не будет работать, тогда как слишком много вольт может привести к короткому замыканию обмоток, что приведет к потере мощности или полному разрушению.
Рабочие значения и значения опрокидывания также необходимо учитывать при крутящем моменте. Операционная крутящий момент — это величина крутящего момента, на которую рассчитан двигатель, а крутящий момент при опрокидывании — это величина крутящего момента, создаваемого при подаче питания со скорости опрокидывания. Вы всегда должны смотреть на требуемый рабочий крутящий момент, но в некоторых приложениях вам нужно знать, насколько далеко вы можете толкать двигатель. Например, для колесного робота хороший крутящий момент равен хорошему ускорению, но вы должны убедиться, что крутящий момент достаточно велик, чтобы поднять вес робота. В данном случае крутящий момент важнее скорости.
Скорость или скорость (об/мин) могут быть сложными для двигателей. Общее правило заключается в том, что двигатели работают наиболее эффективно на самых высоких скоростях, но это не всегда возможно, если требуется редуктор. Добавление шестерен снизит КПД двигателя, поэтому учитывайте также снижение скорости и крутящего момента.