Телеуправление в электроэнергетике
Любая электрическая сеть, то есть будь то сеть небольшого населенного пункта или целого региона, состоит из нескольких объектов, которые тесно взаимосвязаны друг с другом. К таковым объектам относятся подстанции вблизи населенных пунктов, энергетические магистрали, пункты производства и потребления электрической энергии.
Процессы, происходящие между объектами, регулируются специальными диспетчерскими пунктами. Каждый такой пункт выполняет управление большим числом различных подстанций, функционирование которых является автоматическим.
Задачи, которые возложены на объекты электрической сети, безусловно, характеризуются высокой важностью. Следовательно, контроль над ними должен быть постоянным. Управление может осуществляться при помощи двух систем, а именно телеуправление (ТУ) или телесигнализация (ТС).
Более подробно мы расскажем Вам о системе телеуправления.
Как работает система ТУ?
На каждой подстанции имеются собственные распределительные устройства, которые, в свою очередь, оснащены силовыми выключателями. Данные выключатели предназначены для коммутации проходящей и отходящей электрической энергии, которая движется по электролинии. Выключатель взаимосвязан со вторичными блок-контактами, промежуточными реле, а также с реле фиксации. Расположение данных устройств отображается в схеме системы телеуправления. Работают перечисленные приборы в роли датчиков и имеют два состояния: вкл и выкл.
Подстанции оснащаются специальной сигнализирующей аппаратурой, которая предназначена для информирования персонала о состоянии электросхемы. Индикаторами перебоев являются информационные световые табло, звуковые сигналы. Важно отметить, что большую часть времени подстанция выполняет свою работу без людей. Информирование при этом о состоянии функционирования системы ложится на телесигнализацию, которая поступает на пульт дежурного диспетчера.
Работа системы основана на двоичном коде «0» и «1». Одно из значений присваивается положению выключателя. Данное значение поступает через передатчик, который имеет подключение к каналу связи. Канал связи, а он может быть проводным, телефонным или радио-каналом, оснащен пунктом управления энергетическими объектами и приемником. Обработкой сигналов и их преобразованием в нужную для диспетчера информацию занимается именно приемник. По доставленным персоналу сигналам происходит оценка состояния подстанции.
В большинстве случаев получаемых данных не хватает для полной и объективной оценки состояния энергетической системы. Именно поэтому телесигнализация дополняется телеизмерениями. Система ТИ транслирует на пульте управления показания основных измерительных приборов. Схема телеизмерений входит в систему телемеханики.
Используя средства телеуправления диспетчер может оказывать влияние на распределение электрической энергии при помощи специальных средств ТУ. Для этой цели используется собственный передатчик, который выдает в канал связи определенные команды, поступающие с пульта управления. Переданная команда поступает на приемник, а после передается на автоматические приборы и тем самым воздействует на устройства управления силовым выключателем.
Какие существуют команды телеуправления?
Команда – это сигнал, который направляет передатчик диспетчера в орган управления подстанции. Команда требует беспрекословного и немедленного исполнения.
Команды передаются адресно, а именно: выключателю (конкретному объекту подстанции) и группе устройств разных подстанций.
Система ТУ и особенности ее эксплуатации
Диспетчер с пункта коммутации выполняет определенные задачи, которые отличаются требованиями обеспечения.
Так, ТУ характеризуется оперативностью работы, что существенно повышает надежность электрического снабжения потребителей. Также сохраняются критерии безопасности, которые необходимы при использовании электроэнергии.
Прежде. чем осуществить присоединение по ТУ диспетчер обязательно должен учесть состояние выключателя на удаленной подстанции (включен/выключен). Это может быть выполнено двумя путями: при помощи защиты от аварии автоматикой повторного включения (АПВ) или же оперативным персоналом, который имеет специальный допуск к работе на подстанцию.
Прежде, чем осуществить коммутацию схемы, необходимо в любом случае выполнить все требования к безопасности и собрать информацию у персонала о состоянии схемы и готовности ее включения в нагрузку.
Недобросовестные работники нередко совершают ошибку и допускают халатность в поиске места, где возникает короткое замыкание, с целью ускорить данный процесс. То есть, персонал включает под нагрузку выключатель после того, как отключат часть потребителей электроэнергии. такой принцип работы чреват неправильным определением поврежденного участка и в электросхеме снова возникает короткое замыкание. Сопутствующими такой оплошности являются высокие нагрузки на используемое оборудование и переток мощности, то есть отклонениями от нормального режима работы.
Каким образом происходит взаимодействие между ТУ и ТС?
Команды передаются через две ступени:
- подготовительная;
- исполнительная.
Это операция, которая выполняется оператором, контролирующим поступающие на пульт сигналы, с целью подтверждения приема сигнала и его дальнейшей фиксации на мнемосхеме. Если на мнемосхему сигнал поступает вновь, то это говорит об изменениях состояния объекта контроля. Например, это отображается частым миганием светосигнальной аппаратуры. Также повторное поступление сигнала говорит о несоответствии положения прибора сигнала состоянию контролируемого объекта.
Результатом квитирования является занятие сигнальным прибором того места, которое соответствует действительному состоянию объекта контроля.
Квитирование бывает двух видов:
- индивидуальное квитирование, т.е применение индивидуальных ключей;
- общее квитирование, т.е. используется одна общая квитирующая кнопка.
Существуют ситуации, когда команда системы телеуправления не может быть выполнена. В основе этого лежат различные причины. Система телеуправления в таком случае не должна сохранять данную команду и, соответственно, не допускать ее дублирования.
Последующие действия должны проводиться лишь после полной проверки объекта и его функционирования.
Канал связи и его состояние должно быть постоянно под контролем, который осуществляется специальной аппаратурой. Сигнал, что передается по телесигнализации, должен дойти до конечного пункта без каких-либо перемен. Никакие помехи не должны служить причиной снижения достоверности передаваемых команд.
Вся информация, что передается от ТС, сохраняется в памяти аппаратуры до ее подтверждения на пункте управления. При нарушениях в канале связи команды возобновят свою передачу после восстановления нормального режима работы.
В процессе передачи команды телеуправления нередки ситуации изменений, которые вызывают нежелательное действие электрооборудования или вовсе теряют свой смысл. Во избежание таких случаев или же хотя бы для их минимизации в работу автоматики вводится сообщение телесигнализации предварительно до команд телеуправления.
Оборудования телемеханики могут применять устройства, которые работают как на устаревшей аналоговой базе, так и на современных цифровых технологиях. В последнем случае существенно расширяются возможности электрооборудования, а также улучшается защита от помех в каналах связи.
Вам будет интересно:
www.elektro.ru
Телемеханика в электроэнергетике: назначение и применение
Развитие общества предполагает поиск и внедрение нового, лучшего, всего автоматизированного. Энергетика не стала исключением. Здесь также вводят новшества, улучшают системы электроснабжения, регулируют основные параметры работы сети и так далее. Практически все новации переплетаются с телемеханикой в электроэнергетике. Как она работает и зачем ее использовать в повседневной работе энергетиков, читаем далее в статье.
Телемеханика в электроэнергетике: что это такое?

В современном смысле под этим понятием может рассматриваться наука или отрасль техники. В университетах и институтах энергетической направленности изучается предмет, где даются базовые понятия о передаче кодированных радио- и электрических сигналов, которые являются основой управления, контроля и измерения параметров энергетического оборудования.
Что касается отрасли техники, то здесь рассматривается практическая сфера. Последняя предполагает выполнение поставленных задач путем передачи кодированных сигналов. Важно отметить, что телемеханика в электроэнергетике выстраивается на различных стандартах кодирования, предполагающих применение того или иного оборудования.
Как функционирует телемеханика: составные элементы
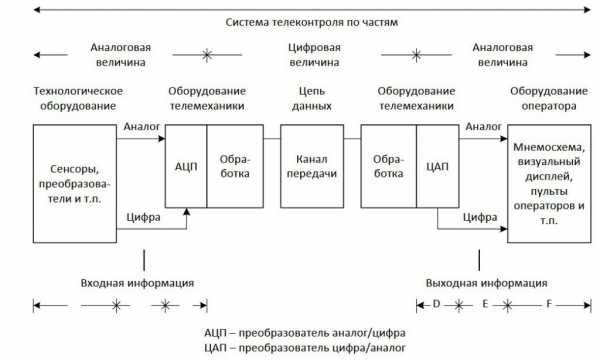
Функционирование отлично показано на схеме выше. Имеется оборудование (измерительное, сигнализирующее или управляющее), которое подключается к шкафу телемеханики. После чего происходит кодирование информации, передающейся по каналам связи на принимающую серверную часть. Здесь выполняется декодирование с выводом результата на пульт в диспетчерской.
Исходя из такой системы, для налаживания единства процесса потребуется: серверная часть на подстанции и в диспетчерском пункте; средство передачи информации аналогового сигнала; элемент кодирования и декодирования. Наладкой и обслуживанием занимается служба СДТУ.
Основные требования к телемеханике

Телемеханика в электроэнергетике – это сложная система, к которой предъявляются особые требования по ряду характеристик. На текущий момент в основу положены следующие позиции:
- Безотказность. Способность оборудования выполнять поставленные перед ней задачи при определенных условиях и в заданный период. Нормирование связывается со средним временем между отказами и выражается в часах. Существуют 3 класса по безотказности.
- Готовность. Представленная позиция характеризуется способностью выполнять телемеханикой поставленные перед ней задачи. Выражается вероятностной величиной, находящейся как отношение времени работы к времени работы с учетом простоев.
- Ремонтопригодность. Это возможность восстановления работоспособности оборудования при обнаружении отказа. Характеристика выражается величиной среднего времени на ремонт телемеханики.
- Защищенность. Указанное требование дополняет описанное выше и проявляется через способность избегать неконтролируемую или опасную ситуацию.
- Достоверность. Данная характеристика во многом определяет эффективность средств телемеханики. Некоторые ошибки могут приводить к неправильному измерению, что влияет на работу оборудования и принятие решений обслуживающего персонала.
Телесигнализация, телеуправление и телеизмерение

В простом понимании для чайников, телемеханика в электроэнергетике выстраивается на следующей триаде:
- Телесигнализация. Предполагает передачу информации о текущих измерениях на подстанциях. Как отмечалось выше, система требует высокой точности, так как от этого зависит правильность принимаемых решений. Для определения точности в телемеханику закладываются алгоритмы, которые резервируют функционирование всей системы измерений.
- Телеуправление. В электроэнергетике телемеханика используется для управления оборудованием в основном на подстанциях 110 кВ и выше. Это связывается с наличием у трансформатора собственных нужд, обеспечивающих запитку телемеханики. Но современные трансформаторные подстанции распределительной сети также снабжаются выключателями, которые обладают телеуправлением.
- Телеизмерение. Представленное направление предполагает передачу информации на пульт путем периодического опрашивания оборудования. Что касается измерений, то для высоковольтной подстанции важны параметры нагрузки (А), напряжение (В, кВ), потребление (мВт). Это позволяет вести режим работы, обеспечивать подачу электроэнергии с сохранением качественных характеристик. К примеру, информация относительно уровня напряжения может стать сигналом к понижению или повышению последнего через РПН.
Эти способы являются гарантом эффективной работы диспетчерского персонала в условиях непрерывного функционирования сети и оборудования.
Современные тенденции: автоматизация электрических сетей

Выше отражено понятие телемеханики в электроэнергетике, что это такое и зачем требуется. Заметим, что вопрос автоматизации на современном этапе развития отрасли стоит остро. Большинство продвинутых стран вкладывают огромные деньги в эту сферу, создавая комплексные сети под названием SmartGrid.
Последняя предполагает полную автономию работы, начиная от транспортировки электрическая высокого напряжения на дальние расстояния, заканчивая «умными переключениями» для устранения повреждений кабельных линий в распределительных сетях. Технологии не стоят на месте, а следование новым тенденциям позволяет получить преимущества:
- Сокращение реальных потерь, благодаря учету с параллельной передачей информации по запросу.
- Получение достоверных данных о реальном потреблении электрической энергии, возможность тщательного планирования и контроля энергопотребления.
- Снижение аварийности, рост надежности. Уменьшение времени устранения аварии в распределительных сетях.
- Повышение уровня безопасности персонала, что выражается в отсутствии необходимости проведения оперативных переключений.
Заключение
Современные направления делают телемеханику в электроэнергетике незаменимым элементом, который обеспечивает максимальную результативность в контроле, обслуживании и управлении энергосистемы. В ближайшем будущем учебная специальность окажется максимально востребованной. Поэтому каждый молодой человек, который еще не нашел себя в жизни, может погрузиться в изучение телемеханики и обеспечить себе неплохой доход в перспективе.
fb.ru
ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ В ЭНЕРГЕТИКЕ — КиберПедия
ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ В ЭНЕРГЕТИКЕ
ВВЕДЕНИЕ
Телемеханика — как отдельная область науки и техники выделилась сравнительно недавно. Но не смотря на свою относительную «молодость» сразу же начала развиваться стремительными темпами, охватывая все новые и новые отрасли промышленности. Сегодня, мы уже даже не замечаем того, с какой легкостью и не принужденностью мы пользуемся ее достижениями.
Примеры применения телемеханики в быту:
— телевизор с пультом ДУ (регулирование уровней громкости, яркости и других параметров) типичный пример телеуправления;
— радиоуправляемые модели машинок, корабликов, самолетиков, эти игрушки представляют собой комплекс телемеханики, с пунктом управления, каналом связи и контролируемым пунктом.
Сам термин телемеханика происходит от двух греческих слов: tele – расстояние (далеко) и mechanica – механика (двигать), т.е., в современном понимании, совершение каких-либо действий на расстоянии или передача информации на расстоянии. Термин был введен в 1905 году французским ученым Бранли.
Это означает, что при помощи специализированного пункта управления (в дальнейшем ПУ) мы можем практически на любом расстоянии включать, отключать какие либо объекты, производить регулирование. Кроме управления, очень важное значение имеет отображение состояния удаленных объектов. Применительно к энергетике, это означает контроль за положением выключателей линий, вводов и положением контактов реле различных защит. Такая информация называется телесигнализацией (ТС). Следующим параметром контроля над объектом является телеизмерения (ТИ). ТИ в свою очередь, подразделяются на текущие телеизмерения (ТИТ) — показывающие мгновенные изменения параметра (например тока или напряжения) и интегральные измерения (ТИИ), которые показывают изменение параметров за какой либо промежуток времени. Обычно телеизмерения интегральные ТИИ — это относиться к энергоучету. Для этих целей обычно применяют свою, специально разработанную аппаратуру, хотя в последнее время разработчики автоматизированных систем объединяют все эти возможности в один комплекс.
Телемеханика — область науки и техники, предметом которой является разработка методов и технических средств передачи и приёма информации (сигналов) с целью управления и контроля на расстоянии.
Специфическими особенностями телемеханики являются:
· удалённость объектов контроля и управления;
· необходимость высокой точности передачи измеряемых величин;
· недопустимость большого запаздывания сигналов;
· высокая надёжность передачи команд управления;
· высокая степень автоматизации процессов сбора информации.
Назначение
Телемеханизация применяется тогда, когда необходимо объединить разобщённые или территориально рассредоточенные объекты управления в единый производственный комплекс (например, при управлении газо- и нефтепроводом, энергосистемой, ж. -д. узлом), либо когда присутствие человека на объекте управления нежелательно (например, в атомной промышленности, на химических предприятиях) или невозможно (например, при управлении непилотируемой ракетой).
Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования, освобождает человека от работы во вредных для здоровья условиях.
Особое значение телемеханика приобретает в связи с созданием автоматизированных систем управления (АСУ). Обработка данных, полученных по каналам телемеханики, на ЭВМ позволяет значительно улучшить контроль за технологическим процессом и упростить управление. Поэтому в настоящее время совместно с понятием «телемеханика» всё чаще и чаще используется сокращение АСУТП — автоматизированная система управления технологическим процессом. Современная система телемеханики также немыслима без компьютера, поэтому можно сказать, что телемеханика и АСУТП — близкие понятия. Разница между этими понятиями улавливается лишь по времени появления и по традиции использования. Например, в энергетике предпочитают использовать слово телемеханика, на промышленных предприятиях — АСУТП.
В англоязычных источниках аналогом понятия «телемеханика» является сокращение SCADA — Supervisory Control And Data Acquisition — диспетчерское управление и сбор данных, в которое вкладывается, по сути, тот же смысл.
Области применения
Предприятия химической, атомной, металлургической, горнодобывающей промышленности, электрические станции и подстанции, насосные и компрессорные станции (на нефте- и газопроводах, в системах ирригации, тепло- и водоснабжения), ж.-д. узлы и аэропорты, усилительные и ретрансляционные установки на линиях связи, системы охранной сигнализации и т. д.
История
Первоначально с понятием телемеханики связывали представление об управлении по радио подвижными военными объектами. Известны случаи применения боевой техники, оснащенной устройствами управления на расстоянии, в 1-й мировой войне.
Практическое применение телемеханики в мирных целях началось в 20-х годах 20 века, главным образом на ж.-д. транспорте: телеуправление ж.-д. сигнализацией и стрелками было впервые осуществлено в 1927 на железной дороге в Огайо (США). В 1933 в Московской энергосистеме (Мосэнерго) введено в эксплуатацию первое устройство телесигнализации. Серийное заводское производство устройств телемеханики в СССР впервые было организовано в 1950 на заводе «Электропульт».
Развитие телемеханики шло параллельно с развитием электроники и средств связи. Первые системы строили на релейных схемах. В 50-х годах на смену реле пришли более надежные полупроводниковые элементы. В конце 60-х годов началось использование интегральных схем.
В конце 80-х годов в схемотехнике систем телемеханики произошел качественный скачок. Вместо микросхем жесткой логики в контроллерах стали использовать микропроцессоры. Это позволило гибко адаптировать аппаратуру под решение конкретной задачи путем замены программного обеспечения. В 1992 году был изготовлен комплекс телемеханики, построенный на восьмиразрядных микропроцессорах. Часть программного обеспечения и конфигурация системы загружалась в память контроллеров с ПЭВМ.
Современные программно-технические комплексы строят также на основе микропроцессорных контроллеров. В настоящее время это 16 и 32-разрядные системы с высоким быстродействием и достаточным объемом памяти. Всё большее значение имеет программное оснащение контроллеров. Для хранения программ и данных применяют FLASH-память, позволяющую легко менять программу и обеспечивать быстрый перезапуск системы в случае сбоя.
Тенденции развития
В современной системе телемеханики большое внимание уделяется программному обеспечению системы и интеграции с действующими системами и программными комплексами. Стандартом стало графическое представление схем контролируемого процесса (мнемосхем) с «живым» отображением текущего состояния, управление объектом с кадров мнемосхем.
В программном обеспечении наблюдается тенденция к стандартизации программных интерфейсов систем сбора данных и обрабатывающих программ (технология OPC), возрастает потребность экспорта собранных данных в специализированные программы (расчета режимов, планирования, аналитические, АРМ специалистов). В условиях усложнения систем повышается роль средств диагностики и отладки.
С технической стороны в системах всё чаще используются современные скоростные каналы связи (оптоволокно, Ethernet) и беспроводные технологии (например, транкинговая и сотовая связь). Вместе с тем сохраняется потребность стыковки с морально (а иногда и физически) устаревшими «унаследованными» системами, с сохранением их протоколов связи. На контролируемых объектах всё чаще возникает необходимость стыковки с локальными технологическими системами.
Наряду с усложнением самих систем и их программного обеспечения наблюдается изменение требований к реализуемым функциям. К традиционным функциям телемеханики (телесигнализация, телеизмерение, телеуправление) добавляются функции энергоучета, транспорта данных с локальных автоматических приборов. К обычным функциям контроля за изменением состояния и превышения предельных значений добавляются возможности текущих расчетов и логического анализа (например, балансные расчеты).
Пример построения телемеханической системы
Рассмотрим основные понятия, используемые в телемеханических системах, на примере так называемой двухуровневой системы (рис.1), ставшей классической схемой.
Контроль и управление системой осуществляют с Пункта Управления (ПУ), где находится диспетчер, аппаратура телемеханики, ЭВМ, мнемонический щит.
Объекты контроля и управления находятся на Контролируемых Пунктах (КП), одном или нескольких.
Взаимодействие между ПУ и КП происходит по каналу связи. Это может быть простая физическая линия, оптоволокно, выделенный телефонный канал, радиоканал и т.п. При подключении к одному каналу связи нескольких КП каждый из них должен иметь уникальный номер.
Системы телемеханики в ДУ.
Структура АСДУ
Любую автоматизированную систему, в том числе и комплекс программно-технических средств (КПТС) телемеханики можно представить в виде трехуровневой системы (рис. 2), включающей в себя:
— подсистему сбора информации;
— подсистему приема и обработки информации;
— подсистему отображения информации.
Иногда подсистемы приема/обработки и отображения данных могут быть объединены (как ПУ или ЦППС), в таком случае, система превращается в двухуровневую (см. введение, рис. 1).
Требования к современным системам ДУ(особенности систем)
ДП всех уровней должны быть оснащены АСДУ (ПТЭ)
Применение сложных топологических структур
Модульность и наращиваемость
Значительный объем собираемых данных
Привязка событий к единому времени
Использование широкого спектра каналов связи
Применение международных стандартных протоколов обмена данными, применение открытых стандартов (интерфейсы, протоколы, ОС, СУБД)
Обмен данными с внешними системами
Применение различных средств отображения информации и управления, индивидуальных и коллективных (АРМ, ДЩ, видеокубы, панели и т.д.)
Повышение надежности работы и самодиагностика оборудования на всех уровнях
Защита информации от несанкционированного доступа и администрирование систем
Интеграция с современным оборудованием и оборудованием предыдущих поколений
Рис. 2
В ПТЭ ЭСиС РФ (с 2003 г.) существует раздел 6 Оперативно-диспетчерское управление. Согласно этому разделу:
Задачи АСДУ:
Планирование (долгосрочное, среднесрочное, краткосрочное)
Оперативное управление
Автоматическое управление
Архивирование, хранение, восстановление данных
Анализ достоверности собираемыханных
Отчетность (генерация отчетных форм)
Расчетные задачи (логические и арифметические)
Обмен данными с другими системами (внутри предприятия и внешними АСУ)
Контроль действий оперативного персонала
ТРЕБОВАНИЯ К ИНФОРМАЦИОННОМУ ОБМЕНУ ТЕХНОЛОГИЧЕСКОЙ ИНФОРМАЦИЕЙ С АВТОМАТИЗИРОВАННОЙ СИСТЕМОЙ СИСТЕМНОГО ОПЕРАТОРА
Приложение 2к Регламенту допуска субъектов оптового рынка электроэнергии к торговой системе оптового рынка электроэнергии (НП Совет Рынка)
Требования к обмену телеинформацией автоматизированной системы диспетчерского управления
2.1. Телеинформация передается между устройствами телемеханики, установленными на энергообъектах (электростанциях, подстанциях), и ОИК диспетчерских пунктов, а также между ОИК диспетчерских пунктов смежных уровней управления. В ее состав входят:
1 телеизмерения параметров режима электрической сети и генерирующих источников;
2 положения коммутационных аппаратов, включая разъединители, главной электрической схемы энергообъекта, сигналы от устройств фиксации коммутационного состояния элементов сети, состояние элементов вторичной коммутации на энергообъектах;
3 команды телеуправления.
2.2. Требования к передаче телеинформации:
4 Объем телеинформации должен обеспечивать адекватность (наблюдаемость) модели реального времени расчетной электрической схемы схеме контролируемой электрической сети и оперативный контроль и регистрацию качества электрической энергии.
5 По каждому присоединению в обязательном порядке должны передаваться телеизмерения величины действующих значений:
— Напряжения (фазное и линейное), для каждой фазы и среднее;
— Тока, для каждой фазы и средний;
— Активной мощности, для каждой фазы и суммарная;
— Реактивной мощности, для каждой фазы и суммарная;
— Полной мощности, для каждой фазы и суммарная;
— Частоты.
В отдельных случаях дополнительно могут передаваться величина тока и значения некоторых неэлектрических параметров (уровни бьефа ГЭС, температура внешней среды, внешняя освещенность, толщина стенок гололеда, весовые и ветровые нагрузки на провода и др.).
ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ В ЭНЕРГЕТИКЕ
ВВЕДЕНИЕ
Телемеханика — как отдельная область науки и техники выделилась сравнительно недавно. Но не смотря на свою относительную «молодость» сразу же начала развиваться стремительными темпами, охватывая все новые и новые отрасли промышленности. Сегодня, мы уже даже не замечаем того, с какой легкостью и не принужденностью мы пользуемся ее достижениями.
Примеры применения телемеханики в быту:
— телевизор с пультом ДУ (регулирование уровней громкости, яркости и других параметров) типичный пример телеуправления;
— радиоуправляемые модели машинок, корабликов, самолетиков, эти игрушки представляют собой комплекс телемеханики, с пунктом управления, каналом связи и контролируемым пунктом.
Сам термин телемеханика происходит от двух греческих слов: tele – расстояние (далеко) и mechanica – механика (двигать), т.е., в современном понимании, совершение каких-либо действий на расстоянии или передача информации на расстоянии. Термин был введен в 1905 году французским ученым Бранли.
Это означает, что при помощи специализированного пункта управления (в дальнейшем ПУ) мы можем практически на любом расстоянии включать, отключать какие либо объекты, производить регулирование. Кроме управления, очень важное значение имеет отображение состояния удаленных объектов. Применительно к энергетике, это означает контроль за положением выключателей линий, вводов и положением контактов реле различных защит. Такая информация называется телесигнализацией (ТС). Следующим параметром контроля над объектом является телеизмерения (ТИ). ТИ в свою очередь, подразделяются на текущие телеизмерения (ТИТ) — показывающие мгновенные изменения параметра (например тока или напряжения) и интегральные измерения (ТИИ), которые показывают изменение параметров за какой либо промежуток времени. Обычно телеизмерения интегральные ТИИ — это относиться к энергоучету. Для этих целей обычно применяют свою, специально разработанную аппаратуру, хотя в последнее время разработчики автоматизированных систем объединяют все эти возможности в один комплекс.
Телемеханика — область науки и техники, предметом которой является разработка методов и технических средств передачи и приёма информации (сигналов) с целью управления и контроля на расстоянии.
Специфическими особенностями телемеханики являются:
· удалённость объектов контроля и управления;
· необходимость высокой точности передачи измеряемых величин;
· недопустимость большого запаздывания сигналов;
· высокая надёжность передачи команд управления;
· высокая степень автоматизации процессов сбора информации.
Назначение
Телемеханизация применяется тогда, когда необходимо объединить разобщённые или территориально рассредоточенные объекты управления в единый производственный комплекс (например, при управлении газо- и нефтепроводом, энергосистемой, ж. -д. узлом), либо когда присутствие человека на объекте управления нежелательно (например, в атомной промышленности, на химических предприятиях) или невозможно (например, при управлении непилотируемой ракетой).
Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования, освобождает человека от работы во вредных для здоровья условиях.
Особое значение телемеханика приобретает в связи с созданием автоматизированных систем управления (АСУ). Обработка данных, полученных по каналам телемеханики, на ЭВМ позволяет значительно улучшить контроль за технологическим процессом и упростить управление. Поэтому в настоящее время совместно с понятием «телемеханика» всё чаще и чаще используется сокращение АСУТП — автоматизированная система управления технологическим процессом. Современная система телемеханики также немыслима без компьютера, поэтому можно сказать, что телемеханика и АСУТП — близкие понятия. Разница между этими понятиями улавливается лишь по времени появления и по традиции использования. Например, в энергетике предпочитают использовать слово телемеханика, на промышленных предприятиях — АСУТП.
В англоязычных источниках аналогом понятия «телемеханика» является сокращение SCADA — Supervisory Control And Data Acquisition — диспетчерское управление и сбор данных, в которое вкладывается, по сути, тот же смысл.
Области применения
Предприятия химической, атомной, металлургической, горнодобывающей промышленности, электрические станции и подстанции, насосные и компрессорные станции (на нефте- и газопроводах, в системах ирригации, тепло- и водоснабжения), ж.-д. узлы и аэропорты, усилительные и ретрансляционные установки на линиях связи, системы охранной сигнализации и т. д.
История
Первоначально с понятием телемеханики связывали представление об управлении по радио подвижными военными объектами. Известны случаи применения боевой техники, оснащенной устройствами управления на расстоянии, в 1-й мировой войне.
Практическое применение телемеханики в мирных целях началось в 20-х годах 20 века, главным образом на ж.-д. транспорте: телеуправление ж.-д. сигнализацией и стрелками было впервые осуществлено в 1927 на железной дороге в Огайо (США). В 1933 в Московской энергосистеме (Мосэнерго) введено в эксплуатацию первое устройство телесигнализации. Серийное заводское производство устройств телемеханики в СССР впервые было организовано в 1950 на заводе «Электропульт».
Развитие телемеханики шло параллельно с развитием электроники и средств связи. Первые системы строили на релейных схемах. В 50-х годах на смену реле пришли более надежные полупроводниковые элементы. В конце 60-х годов началось использование интегральных схем.
В конце 80-х годов в схемотехнике систем телемеханики произошел качественный скачок. Вместо микросхем жесткой логики в контроллерах стали использовать микропроцессоры. Это позволило гибко адаптировать аппаратуру под решение конкретной задачи путем замены программного обеспечения. В 1992 году был изготовлен комплекс телемеханики, построенный на восьмиразрядных микропроцессорах. Часть программного обеспечения и конфигурация системы загружалась в память контроллеров с ПЭВМ.
Современные программно-технические комплексы строят также на основе микропроцессорных контроллеров. В настоящее время это 16 и 32-разрядные системы с высоким быстродействием и достаточным объемом памяти. Всё большее значение имеет программное оснащение контроллеров. Для хранения программ и данных применяют FLASH-память, позволяющую легко менять программу и обеспечивать быстрый перезапуск системы в случае сбоя.
Тенденции развития
В современной системе телемеханики большое внимание уделяется программному обеспечению системы и интеграции с действующими системами и программными комплексами. Стандартом стало графическое представление схем контролируемого процесса (мнемосхем) с «живым» отображением текущего состояния, управление объектом с кадров мнемосхем.
В программном обеспечении наблюдается тенденция к стандартизации программных интерфейсов систем сбора данных и обрабатывающих программ (технология OPC), возрастает потребность экспорта собранных данных в специализированные программы (расчета режимов, планирования, аналитические, АРМ специалистов). В условиях усложнения систем повышается роль средств диагностики и отладки.
С технической стороны в системах всё чаще используются современные скоростные каналы связи (оптоволокно, Ethernet) и беспроводные технологии (например, транкинговая и сотовая связь). Вместе с тем сохраняется потребность стыковки с морально (а иногда и физически) устаревшими «унаследованными» системами, с сохранением их протоколов связи. На контролируемых объектах всё чаще возникает необходимость стыковки с локальными технологическими системами.
Наряду с усложнением самих систем и их программного обеспечения наблюдается изменение требований к реализуемым функциям. К традиционным функциям телемеханики (телесигнализация, телеизмерение, телеуправление) добавляются функции энергоучета, транспорта данных с локальных автоматических приборов. К обычным функциям контроля за изменением состояния и превышения предельных значений добавляются возможности текущих расчетов и логического анализа (например, балансные расчеты).
Пример построения телемеханической системы
Рассмотрим основные понятия, используемые в телемеханических системах, на примере так называемой двухуровневой системы (рис.1), ставшей классической схемой.
Контроль и управление системой осуществляют с Пункта Управления (ПУ), где находится диспетчер, аппаратура телемеханики, ЭВМ, мнемонический щит.
Объекты контроля и управления находятся на Контролируемых Пунктах (КП), одном или нескольких.
Взаимодействие между ПУ и КП происходит по каналу связи. Это может быть простая физическая линия, оптоволокно, выделенный телефонный канал, радиоканал и т.п. При подключении к одному каналу связи нескольких КП каждый из них должен иметь уникальный номер.
cyberpedia.su
Телемеханика — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 17 июля 2017; проверки требует 1 правка. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 17 июля 2017; проверки требует 1 правка.Телемеханика —
- наука об управлении и контроле на расстоянии с передачей (по каналу связи) кодированных электрических или радиосигналов, несущих управляющую информацию или данные о состоянии контролируемого объекта. Объектами телемеханического управления и контроля могут служить технологические процессы, машины, устройства, биологические системы и др.
- отрасль техники, разрабатывающая, создающая и использующая средства кодирования, передачи и приёма информации по каналам проводной и радиосвязи. В системах телемеханики информация обычно передается в кодированном виде по одному каналу связи. Средства телемеханики используются для телеизмерений и телеуправления объектами энергосистем, газо- и нефтепроводов, атомных электростанций, некоторых химических предприятий, автоматических метеостанций и др.[1]
Термин «телемеханика» был предложен в 1905 году французским учёным Э. Бранли. Первоначально с понятием телемеханики связывали представление об управлении по радио подвижными военными объектами. Известны случаи применения боевой техники, оснащенной устройствами управления на расстоянии, в 1-й мировой войне.
Практическое применение телемеханики в мирных целях началось в 20-х годах XX века, главным образом на железнодорожном транспорте: телеуправление сигнализацией и стрелками было впервые осуществлено в 1927 на железной до
ru.wikipedia.org
Телемеханика
Автор: Иванюкович А.А., главный специалист по АСУ ТП ООО «Энергоконтур»
Электроэнергетика считается уникальной производственной отраслью, где практически единовременно происходит производство и потребление готового продукта в условиях значительной территориальной удаленности между поставщиками и потребителями.
Как следствие большого количества отдельных объектов генерации, распределения и потребления (узлов), именно в электроэнергетике довольно остро стоит вопрос организации автоматизированной системы диспетчерского управления (АСДУ).
Рассмотрим принцип построения АСДУ на базе распределительной сети 0,4-10(6) кВ.

На уровне отдельных узлов устанавливаются системы телемеханики – комплексы технических, аппаратных и программных средств, осуществляющих сбор сигнализации, передачу телеинформации на вышестоящие уровни, трансляцию команд управления.
Согласно СТП 09110.47.104-11 «Методические рекомендации по автоматизации распределительных электрических сетей 0,4-10(6) кВ Белорусской энергосистемы» сбор информации с объектов управления электрических сетей рекомендуется предусматривать в следующем объеме:
- телесигнализация положения основного коммутационного оборудования 10(6) кВ;
- телеизмерение токов, а при возможности активной и реактивной мощности линий 10(6) кВ и понижающих трансформаторов 10(6)/0,4 кВ;
- телеизмерение напряжения на шинах 10(6) и 0,4 кВ;
- телеизмерение токов вводных и секционных выключателей 0,4 кВ;
- телесигнализация наличия напряжения либо телеизмерения на отходящих линиях 0,4 кВ при необходимости;
- аварийно-предупредительная сигнализация;
- телесигнализация срабатывания пожарных и охранных датчиков и систем;
- информация фиксирующих приборов и ОМП.
Для выполнения телеизмерений, как правило, применяются многофункциональные цифровые измерительные преобразователи с цифровым интерфейсом.
Телеуправление, как правило, предусматривается в объеме, необходимом для централизованного решения задач по установлению надежных и экономически выгодных режимов работы электроустановок с обеспечением электробезопасности персонала и оборудования. Рекомендуется предусматривать телеуправление выключателями 10(6) кВ, вводными и секционным выключателями 0,4 кВ.
Передача телеметрической информации на вышестоящие уровни, как правило, выполняется по модемным, оптическим и GSM-каналам связи с использованием стандартного телемеханического протокола передачи данных МЭК-101/104 по СТП 09110.48.526 и СТП 09110.48.528, что позволяет, теоретически, независимо от типа контроллера нижнего уровня интегрировать систему телемеханики в существующую систему АСДУ.
Однако, практически, в рамках одного протокола данных реализация может быть выполнена несколькими способами и иногда приходится затратить на отладку стыковки верхнего и нижнего уровня значительный промежуток времени, соизмеримый со временем наладки остальной части системы.
Данное утверждение было неоднократно проверено специалистами ООО «Энергоконтур» на практике, т.к. приходилось налаживать системы телемеханики на базе практически всех, представленных на сегодняшний день, контроллерах нижнего уровня, таких фирм-производителей, как Mitsubishi Electric (контроллеры FX3U), Alstom (контроллеры присоединения C264), ПрософтСистемы (УТМ ЭКОМ-ТМ, контроллеры присоединения ARIS C30X), Новософт (контроллеры Вариконт-Микро, Вариконт-Нано), ИнделКо (контроллеры Индел 1716, Moscad) и др.
Верхний уровень включает в себя сервер, с установленным на нем SCADA-пакетом, реализующим сбор, обработку, архивирование информации об объектах мониторинга и предоставляет всю информацию на автоматизируемое рабочее место (АРМ) диспетчера в наиболее удобной для восприятия форме (в виде графиков, ретроспектив, однолинейных схем).
В Республике Беларусь на данный момент используются такие SCADA-пакеты как — ABB MicroSCADA Pro SYS 600C, АГАТ-2000, Simatic WinCC, PROFICY iFIX, ТМ2000 и др. Данное разнообразие объясняется тем, что выбор систем АСДУ происходит на тендерной основе.
На данный момент системы телемеханики являются неотъемлемой частью всех реконструируемых и вновь вводимых объектов электроэнергетики всех классов напряжения, так как внедрение данных систем значительно повышает такие параметры, как:
- 1) долговечность — устойчивость сетевого комплекса к физическому износу активов и отрицательному воздействию внешней среды;
- 2) работоспособность — сохранение больших участков сети под напряжением в периоды неблагоприятных условий, а также более точный мониторинг;
- 3) контроль перетоков электроэнергии и контроль объемов, поставляемых потребителям, при гарантированном качестве энергоснабжения;
- 4) гибкость — адаптируемость сети к изменениям в окружающей среде с сохранением функциональных характеристик;
- 5) эффективность — минимизация расхода первичных энергоресурсов, эксплуатационных расходов и потерь в сетях;
- 6) безопасность — защищенность сети от повреждений, которые могут возникнуть в результате намеренных действий или естественных явлений.
alinea.by
2. ТЕЛЕУПРАВЛЕНИЕ И ТЕЛЕСИГНАЛИЗАЦИЯ
2.1.Основные понятия
Согласно ГОСТ 26.005-82телеуправление (ТУ) – управление положением или состоянием дискретных объектов и объектов с непрерывным множеством состояний методами и средствами телемеханики. Телеуправление подразделяется на двухпозиционное и многопозиционное.
Двухпозиционное телеуправление – телеуправление объектами, имею-
щими два возможных состояния.
Многопозиционное телеуправление – телеуправление объектами, име-
ющими более двух возможных состояний.
Для выполнения телеуправления согласно ГОСТ 26.005-82могут быть использованы следующие приказы:
Команда телеуправления – телемеханическое сообщение, передаваемое с пункта управления на контролируемые пункты и вызывающее изменение -положения или состояния объектов.
Групповая команда телеуправления– команда телеуправления, адресованная нескольким объектам одного контролируемого пункта.
Циркулярная команда телеуправления – команда телеуправления, адресованная объектам нескольких или всех контролируемых пунктов телемеханической системы.
Команда-инструкция– команда телеуправления, передаваемая с пункта управления на контролируемые пункты оперативному персоналу, где она выводится на устройства отображения в виде стандартных инструкций.
Телемеханическая команда опроса– телемеханическое сообщение, требующее от контролируемого пункта передачи информации о состоянии объектов.
Телесигнализация (ТС) – получение информации о состоянии контролируемых и управляемых объектов, имеющих ряд возможных дискретных состояний, методами и средствами телемеханики (ГОСТ 26.005-82).
В связи с этим устройства телеуправления обычно совмещаются с устройствами телесигнализации и называются устройствами ТУ-ТС.К исключениям относятся, например, устройства ТУ строительными и другими кранами со зрительным контролем, заменяющим ТС и системы циркулярной передачи команд по силовой сети.
При ТУ промышленными объектами во многих случаях передаются простейшие двухпозиционные дискретные команды типа«включить», «выключить» либо «прибавить», «убавить» (давление, расход, напряжение, уровень и т. д.). Такие же простейшие сигналы передаются и при телесигнализации, например, «включен» или «отключен» данный объект.
81
2.1.1. Требования, предъявляемые к устройствам ТУ-ТС:
1.Операция ТУ обязательно должна сопровождаться ответной телесигнализацией, которая используется для контроля правильности выполнения операции ТУ.
2.Посылка приказа ТУ должна состоять как минимум из двух операций: подготовительной (выбор объекта и характера операции) и исполнительной (запуск передачи).
3.Любое одноили двукратное искажение сигнала при ТУ или повреждение любого элемента должно сопровождаться защитным отказом, т.е. при этом не допускается исполнение ложных приказов.
4.Исполнение приказов не должно происходить при повреждении канала связи в спокойном состоянии системы или в процессе передачи.
5.Выход из строя канала связи, а также потеря питания системы не должны приводить к ложным приказам и должны сигнализироваться на ПУ; канал связи должен непрерывно контролироваться.
6.Посылка приказов ТУ должна производиться методом спорадической передачи; передача ответной ТС допускается как спорадическим, так и циклическим методом.
7.В случае нарушения приема известительной ТС на ПУ схема должна обеспечивать повторные передачи с КП на ПУ до тех пор, пока эти сигналы не будут сквитированы дежурным персоналом ПУ.
8.Приказы ТУ, не выполняемые по каким-либопричинам, не должны запоминаться на КП. Для их выполнения необходим повторный запуск устройства с ПУ.
9.Должно быть предусмотрено предпочтение известительной ТС перед посылкой приказа ТУ.
10.Сигналы, возникающие на КП во время повреждения устройства либо канала связи, при передаче других сигналов должны запоминаться и затем при ликвидации повреждений либо окончании передачи других сигналов автоматически передаваться на ПУ.
11.Приход каждого известительного сигнала на ПУ должен сопровождаться общим вызывным сигналом(звуковым или световым), квитируемым вручную.
12.Одна исполнительная операция ТУ предназначена, как правило, для одного объекта управления. Фиксация приема только одного приказа является дополнительной гарантией его правильности. В отдельных, особых случаях система должна допускать возможность циркулярного управления, т.е. передачу приказов нескольким объектам одной исполнительной операцией ТУ.
По быстродействию устройстваТУ-ТСразделяются на группы: со временем передачи команды до1 с – первая группа, до 4 с – вторая группа, более 4 с – третья группа.
По помехоустойчивости системыТУ-ТСподразделяются на три категории (ГОСТ26.205-83).Требования к достоверности контрольной и управляющей информации приведены в табл. 2.1.
82
Таблица 2.1
Требования к достоверности контрольной и управляющей информации
Вероятностные характеристики | Вероятность события Р, не более | ||||||
| Категория систем |
|
| ||||
|
| 1 |
| 2 |
| 3 |
|
Вероятность | трансформации команды | 10-14 |
| 10-10 |
| 10-7 |
|
ТУ |
|
|
|
|
|
|
|
Вероятность | трансформации сообщений | 10-8 |
| 10-7 |
| 10-6 |
|
ТС |
|
|
|
|
|
|
|
Вероятность образования ложной ко- | 10-12 |
| 10-7 |
| 10-4 |
| |
манды или контрольного сообщения |
|
|
|
|
|
| |
2.1.2.Виды команд. Команды разделяются на следующие:
–однопозиционные – «включить» или «отключить»;
–двухпозиционные – «включить» и «отключить»;
–трехпозиционные – «прибавить», «убавить» и «стоп», воздействующие во многих случаях на уставки автоматических регуляторов и называемые телерегулированием;
–многопозиционные – передача значения телеуправляемого параметра в аналоговой или дискретной форме (например, открыть на 35 % затвор ирригационного канала). Передача таких команд получает более широкое применение
иосуществляется главным образом путем спорадических адресных передач кодовыми комбинациями, содержащими адрес и текст для объекта управления. Они называются многопозиционными кодовыми комбинациями и относятся к телерегулированию;
–спорадические – передаются по мере возникновения необходимости их передачи. Такие команды составляют подавляющее большинство в промышленной телемеханике;
–циклические – повторение передачи одной команды в течение ряда циклов до прихода известительных сигналов. Такие команды реализуются в циклических системах с временным разделением сигналов. Каждому сигналу при этом отводится свой временной интервал;
–в зависимости от источников– команды формируемые диспетчером
(оператором), управляющим устройством и ЭВМ;
– по методу разделения сигналов – временные, частотные и кодовые.
2.2.Методы телеуправления
Втелемеханике применяют следующие методы управления: двухступенчатое, иерархическое или многоступенчатое, циркулярное и циклический опрос.
При двухступенчатом процессе управления диспетчер сначала осуществляет подготовительную операцию– выбирает с помощью индивидуального ключа требуемый объект управления. Далее осуществляет исполнительную
83
операцию – посылает команду «включить» или «отключить» на объект управления при помощи индивидуального либо общего ключа(кнопки). Двухступенчатость управления уменьшает вероятность неправильной посылки команды из-запоспешности, рассеянности или просто ошибки диспетчера. В системе должна быть предусмотрена сигнализация о выбранном объекте либо местная,
либо поступившая с КП и подтверждающая выполнение подготовительной операции.
Принцип иерархичности основан на разделении информации управления по определенным уровням, что позволяет создать многоступенчатые системы ТУ-ТС.
Информация, возникающая в каждой ступени, почти полностью замыкается в пределах этой ступени, и лишь часть ее передается на следующую ступень. В центральный диспетчерский пункт (ЦДП) поступают лишь некоторые характерные обобщающие показатели и данные о работе нижних ступеней управления. Самым нижним рангом является местная автоматика, которая может самостоятельно воздействовать на объект. В то же время наиболее важная информация передается непосредственно в ЦДП. В свою очередь из ЦДП на нижестоящие ступени управления поступают команды обобщающего характера, типа заданий, которые конкретизируются на месте.
Циркулярное управление характеризуется одновременной передачей в течение одного цикла многих команд, т.е. осуществляется управление многими объектами. Причинами этого могут быть условия технологического процесса или необходимость сокращения времени управления, т.е. увеличение быстродействия. Однако в большинстве случаев для обеспечения надежности управления за один цикл посылается команда только одному объекту. При этом достаточно просто осуществляется контроль над достоверностью принятого -сообщения (по числу информационных импульсов).
При циклическом опросе диспетчер может послать команду на КП, с которого поочередно будет передаваться информация о состоянии всех или группы объектов. В системах телемеханики для рассредоточенных объектов такая связь может осуществляться с одним КП, несколькими или со всеми. Циклический опрос может производиться спорадически(по мере необходимости) или автоматически. Причем как КП, так и объекты на них могут подключаться поочередно или по заданной программе.
2.3. Виды и методы сигнализации
Различают следующие виды сигнализации:
1. Сигнализация о состоянии объектов и системы. Такая сигнализация имеет место как в устройствах ТС, предназначенных для сигнализации, так и в системах ТУ-ТС.Она может осуществляться либо автоматически, либо по вызову диспетчера.
Сигнализация о состоянии объектов в устройствах ТУ-ТСявляется всегда адресной. Кроме сигнализации о состоянии объектов в системе предусматрива-
84
ется сигнализация об исправной работе отдельных устройств аппаратуры ДП, КП и линии связи.
2.Сигнализация, подтверждающая выполнение команд ТУ, или так называемая известительная сигнализация. Эта сигнализация может подтверждать как промежуточное исполнение команды, связанное с включением ряда устройств, предшествующих переключению объекта, так и извещать об изменении состояния непосредственно объекта.
3.Сигнализация о выходе измеряемого параметра за заранее установленные пределы (предупредительная сигнализация). Сюда же можно отнести аварийную сигнализацию – когда сигнализируется появление аварийной ситуации на контролируемом объекте.
Согласно ГОСТ воспроизведение дискретных сообщений при ТС должно обеспечиваться по методу «темного» либо «светлого» щита.
4.Сигнализация по методу «светлого» щита означает, что зажженная лампочка на щите будет гореть до тех пор, пока объект включен. Если все объекты включены, то все индикаторы светятся. Это может создать неудобства для диспетчера в случае большого числа объектов. От этого недостатка свободна сигнализация по методу «темного» щита, при которой о положении объекта судят не по индикаторной лампочке, которая обычно погашена, а по положению ключа. Индикатор светится лишь при изменении состояния объекта. Например, приходит сигнал, извещающий об изменении положения4 объекта. При этом начинает светиться индикатор 4-гои подается акустический сигнал. Возникает
состояние несоответствия между новым состоянием объекта и положением ключа, который повернут в положение, соответствующее предшествующему состоянию объекта. Диспетчер переводит ключ в положение, соответствующее новому состоянию объекта, индикатор гаснет и прекращается подача акустического сигнала.
Следует отметить, что телесигнализация может осуществляться либо спорадически (при изменении состояния объекта или по желанию диспетчера), либо циклически.
2.4.Классификация объектов управления и устройств ТУ-ТС
Объекты управления делятся на сосредоточенные и рассредоточенные, двухпозиционные и многопозиционные. Кроме того, имеются объекты управления, требующие непрерывного ТУ.
Стационарные объекты телемеханического управления и контроля могут быть либо расположены в одном пункте (производственном сооружении), либо разбросаны поодиночке или небольшими группами по площади или вдоль общей линии связи. Телемеханическую систему, обслуживающую объекты первого типа, называют системой с сосредоточенными объектами; система второго типа называется системой с рассредоточенными объектами. Сосредоточенные объекты типичны, например, для электростанций и подстанций.
85

Примером системы с рассредоточенными объектами может служить телеуправление насосными установками на нефтепромыслах.
Двухпозиционные объекты могут находиться в одном из двух состояний: включенном или отключенном. Многопозиционные объекты могут иметь большое количество фиксированных положений. К таким объектам относятся различные задвижки, а также щиты в водовыпусках ирригационных систем. ТУ этими объектами осуществляется путем передачи соответствующего количества команд на установку в заданную позицию.
Ряд объектов управления, например, узлы настройки различных автоматических регуляторов и рули управления подвижными системами требуют установки их в любое положение из заданного диапазона. Управление настройкой автоматических регуляторов производится организацией непрерывного канала ТУ с передачей команд«больше» или «меньше» и с контролем при помощи систем телеизмерений.
В силу того, что методы построения систем телеуправления и телесигнализации аналогичны и функции ТУ и ТС выполняются, как правило, общими установками, то в дальнейшем системы ТУ и ТС будем рассматривать обобщенно с выделением лишь элементов, специфичных для ТУ и ТС.
Классификация устройств ТУ-ТСпо методам передачи, режимам передачи, кодам и методам защиты приведена на рис. 2.1.
Рис. 2.1. Классификация устройств ТУ-ТС
86
studfiles.net
Системы телемеханики в энергетике. Общая классификация. | Статьи — Промышленный каталог статей
Для решения задач передачи данных для дистанционного управления техническими системами была создана техническая дисциплина — телемеханика. Особенно важные задачи стоят перед телемеханикой в энергетике.
Системы телемеханики получили значительное применение в производственных отраслях, где остро стоит вопрос организации централизованного управления территориально удалёнными системами. Это железнодорожный транспорт, крупные промышленные предприятия, энергетическая отрасль и т. д.
Особо важную роль играют модули телеуправления, модули телесигнализации и так называемые контроллеры присоединения именно в энергетической отрасли, которую можно смело назвать уникальной по сравнению со всеми другими производственными отраслями. Ведь нигде, ни в одном другом производстве нет настолько чёткой и согласованной деятельности между поставщиками и потребителями готовой продукции.
Так как продукцией является электроэнергия, то все крупные производители и потребители должны быть объединены в единую систему. Если взять Россию, то в ЕЭС входят сотни электростанций, которые расположены на территории 8 часовых поясов. При этом их общая мощность превышает 170 ГВт. Для решения задач управления и координации энергетических систем необходимы современная автоматика и телемеханика.
Давайте рассмотрим, какие системы телемеханики применяются в энергетике, и их классификацию. В первую очередь разберёмся, чем автоматика и телемеханика различаются между собой.
Главной особенностью систем телемеханики является наличие устройств, обеспечивающих передачу информации на большие расстояния. При этом необходимо, чтобы модули телеуправления получали как можно менее искажённую информацию. В условиях значительной территориальной разобщённости элементов энергосистем и наличия значительного количества помех это создаёт наибольшую проблему для работы системы телемеханики.
По заложенным в них функциям и типу передаваемых данных системы телемеханики, применяемые в энергетической отрасли, классифицируются на:
— модули телеуправления, управляющие отдельными единицами оборудования или целыми комплексами;— модули телесигнализации, на которые возложена функция дистанционного контроля состояния и положения объектов;
— системы телеизмерения, проверяющие показатели различных величин;
— модули передачи данных, предназначенные для передачи на расстояние информации об управляемых объектах в цифровой или другой форме.
Если говорить в общем, то все системы телемеханики представляют собой системы передачи данных. В них содержится совокупность технических средств (модули телесигнализации, управления, модули телеизмерения, модули дискретной сигнализации и т. д.), которые должны обеспечить передачу информации от источника к рабочему органу и выполнение всех возложенных на неё функций.
Основными критериями при выборе системы телемеханики являются обеспечение максимальной функциональности, высокая надёжность в эксплуатации как самой системы, так и программного обеспечения, а также поддержка основных протоколов обмена данных. Важным показателем, которым должны обладать автоматика и телемеханика, является доступность совокупной стоимости владения, куда входит стоимость самой системы и её эксплуатации.
www.12821-80.ru