что особенного и какой принцип работы?
Имея производительность и точность, характерные шаговому двигателю, серводвигатель демонстрирует больший потенциал для генерирования крутящего момента. Существует целый модельный ряд — от нано-сервомоторов до высокомоментных модификаций.
Давайте рассмотрим, как высокий показатель крутящего момента сочетается с внутренними характеристиками сервомеханизма, а также такими критическими показателями, как коэффициент инерции и частота вращения.
Общее определение
Крутящий момент, выражающийся в виде формулы, представляет собой вращательное усилие, направленное перпендикулярно вектору смещения, умноженному на длину вектора от точки приложения силы до оси вращения.
Результат уравнения будет положительным, если вращение совершается против часовой стрелки или отрицательным, если объект поворачивается по часовой стрелке.
Если речь идет о сервомоторе, — этот технический термин определяет механическую работу, совершаемую вращением его вала и обычно измеряемую в ньютон-метрах (Нм). В спецификациях линейных моделей способность к перемещению объектов определяется силой.
В спецификациях линейных моделей способность к перемещению объектов определяется силой.
Сервомотор: что значит высокий крутящий момент
Для сервомотора высокий крутящий момент означает, что механизм способен выдерживать более высокие нагрузки. Величина вращающего усилия, которое создает сервомеханизм, зависит от ряда факторов — напряжения питания, скорости вращения вала и т.д.
Существует несколько способов измерения величины крутящего момента:
Один из вариантов заключается в том, чтобы установить датчик на валу и считывать показания во время работы двигателя. В этом случае точность измерения зависит от правильных настроек прибора. Не забывайте учесть погрешности в настройках сцепления.
Оценить величину момента можно также по показаниям датчиков положения или скорости. Для применения этого метода, подключите к приводу большую нагрузку с заданным моментом инерции. Опираясь на результаты измерений, рассчитайте величину скорости и ускорения и, учитывая момент инерции, определите требуемое значение.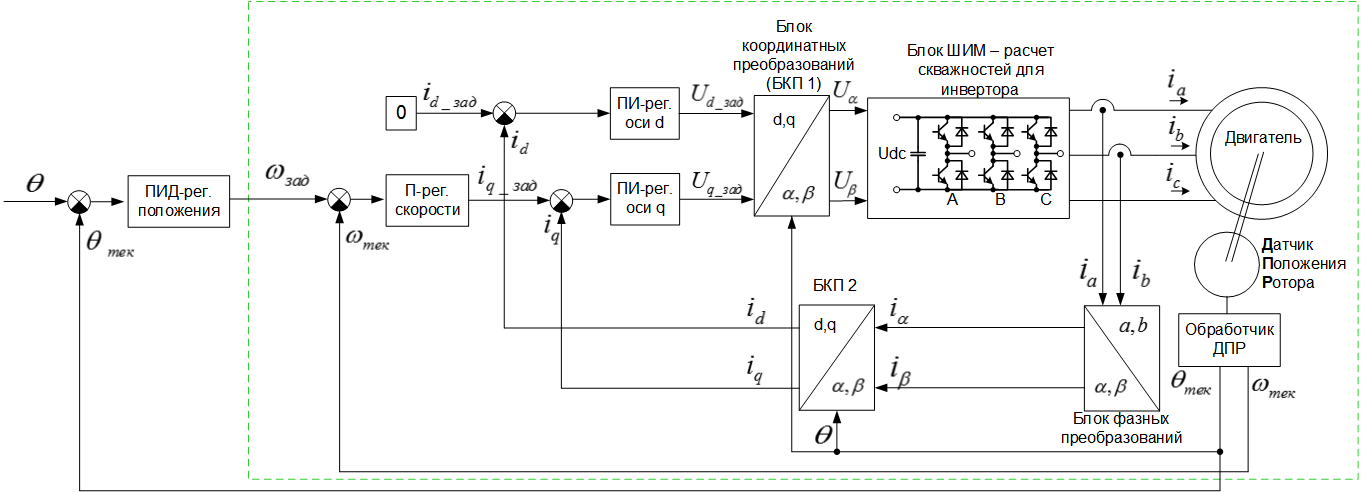 Основным преимуществом этой методики является количественная оценка крутящего момента по отношению к скорости.
Основным преимуществом этой методики является количественная оценка крутящего момента по отношению к скорости.
Третий метод заключается в проведении расчетов на основе измерений датчика усилия, производимых на определенном расстоянии. Искомый показатель равен расстоянию, умноженному на силу, минус погрешность.
Одним из возможных способов получения сервомотора с высоким крутящим моментом является добавление коробки передач, которая обеспечивает пропорциональное преобразование скорости в крутящий момент.
Передаточное отношение — это показатель увеличения устройством вращательного усилия при снижении скорости вращения.
Технические детали
Технические детали
В спецификациях на свои сервомоторы производители указывают несколько показателей крутящего момента. Давайте рассмотрим, что обозначает каждый из них:
Номинальный — мощность сервопривода при заданных рабочих условиях — номинальная скорость и температура окружающей среды. Если температура в помещении пользователя превышает рекомендуемый максимум, крутящий момент имеет тенденцию уменьшаться пропорционально числу оборотов в минуту. В обратной ситуации снижение замедляется.
В обратной ситуации снижение замедляется.
Пиковый — максимальный крутящий момент, при котором двигатель функционирует стабильно. Показатель рассчитывается как сумма трех вращательных сил — ускорения, трения и нагрузки. Он всегда кратковременный по продолжительности (не дольше чем необходимо для преодоления механического сопротивления при запуске сервомотора) и находится в пределах участка прерывистого движения.
Среднеквадратичный — учитывает разные значения параметра, которые возникают на протяжении рабочего цикла сервомотора, а также их предполагаемую продолжительность. Он отражает, как изменения вращающего усилия влияет на производительность двигателя во время ускорения, замедления и при постоянной скорости. Среднеквадратичный показатель всегда находится в пределах непрерывного отрезка кривой.
Если установка работает со статической нагрузкой, превышающей динамическую нагрузку, следует учитывать показатель при заклинивании, а именно какой величины сила, обусловленная вращением, при нулевой нагрузке.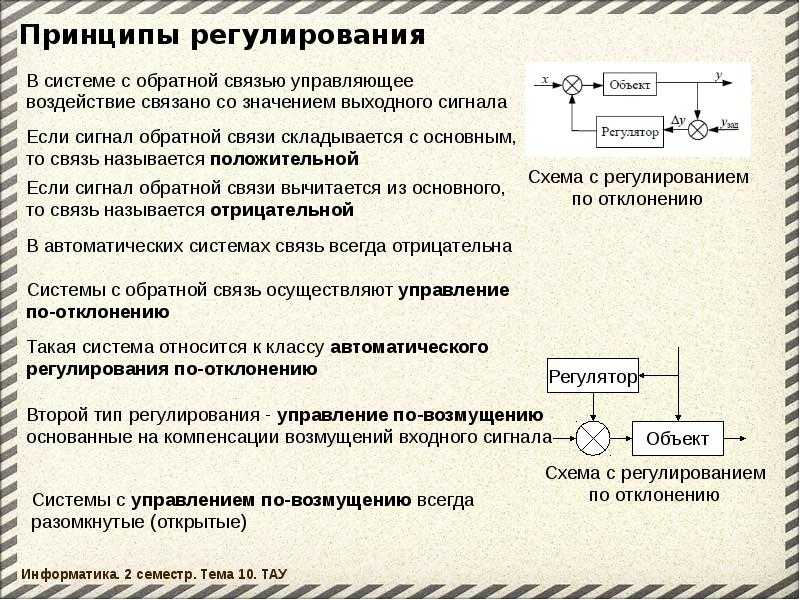 Несмотря на то, что двигатель не работает должным образом, электропитание продолжает поступать, вызывая повышение температуры. Таким образом, это значение является предельным. При соблюдении ограничений, заклинивший мотор продолжает работать в безопасном режиме.
Несмотря на то, что двигатель не работает должным образом, электропитание продолжает поступать, вызывая повышение температуры. Таким образом, это значение является предельным. При соблюдении ограничений, заклинивший мотор продолжает работать в безопасном режиме.
Другие важные параметры
При выборе сервомотора величина крутящего момента является первостепенно важным критерием. Тем не менее, необходимо также учитывать, как этот показатель будет меняться в зависимости от изменения скорости и коэффициента инерции.
Коэффициент инерции — это отношение инерции двигателя к его нагрузке. Это значение влияет на механическую составляющую в общей формуле эффективности. В случае несоответствия системным требованиям этот коэффициент может снизить точность позиционирования из-за ухудшения работы элементов контрольного контура.
Показатель инерции мотора указан в спецификации изготовителя. Чтобы вывести другой показатель, который будет отражать сопротивление прилагаемой нагрузки изменениям ее положения, необходимы определенные расчеты. При расчетах следует учитывать все компоненты системы, задействованные в движении (напр. сцепление, приводные элементы).
При расчетах следует учитывать все компоненты системы, задействованные в движении (напр. сцепление, приводные элементы).
В идеале оба показателя должны быть идентичны, что, однако, неосуществимо и даже, при определенных условиях, недопустимо. Трудно окончательно определить идеальное соотношение, но одно не вызывает сомнений — оно не должно быть ни сверхвысоким, ни необоснованно низким.
При чрезмерных значениях растет энергопотребление и увеличиваются эксплуатационные расходы. Могут также возникнуть проблемы, вызванные резонансом или вибрацией. В то же время, низкое значение (соотношение почти 1:1) часто является признаком того, что размер привода слишком велик для предполагаемого применения, что ведет к избыточным расходам.
Для получения адекватного соотношения, попробуйте поэкспериментировать с размерами сервомеханизма, увеличивая и уменьшая их, или попробуйте использовать редукторный привод. Набор шестерен позволит регулировать коэффициент инерции в зависимости от заданных условий, одновременно оптимизируя крутящее усилие и поддерживая частоту вращения на желаемом уровне. Независимо от того, какой вариант вы выберете, конфигурация проектируемой системы остается определяющей.
Независимо от того, какой вариант вы выберете, конфигурация проектируемой системы остается определяющей.
Скорость сервопривода играет решающую роль при расчете размеров и как это влияет на изменение значений крутящего момента на протяжении периода времени.
Зависимость следующая: когда частота вращения двигателя высокая, другой показатель низкий и наоборот. Взаимозависимость очевидна на кривой крутящего момента и скорости, которая является уникальной для каждой модели двигателя и имеет две зоны — непрерывной и прерывистой нагрузки. Если заданная пара “скорость — крутящий момент” попадает в зону непрерывной нагрузки, значит привод способен вырабатывать мощность в течение неограниченного периода времени без тепловых или других повреждений. Комбинации значений в зоне прерывистой нагрузки допустимы только в течение короткого интервала времени, например при ускорении или замедлении. При выходе за пределы этого интервала сервомеханизм начинает вырабатывать избыточное тепло.
Серводвигатели серии RDrive, отличающиеся высоким крутящим моментом по своей конструкции и гарантируют вам оптимальное решение для достижения любых поставленных задач.
Зубчатая передача устраняет проблемы связанные с инерцией, позволяя при этом получить на выходе высокий крутящий момент — до 216 Нм при непрерывной нагрузке и до 333 Нмин — при прерывистой нагрузке.
Модельный ряд включает в себя пять конструкционных размеров, как с редуктором, так и без него. В безредукторной версии вы получите увеличение числа оборотов при меньшей длине корпуса. Модификация с редуктором отличается высоким крутящим моментом, но занимает больше пространства.
Для получения дополнительной информации о крутящем моменте и других параметрах смотрите детальные характеристики серводвигателя RDrive.
07.04.2020
Появились вопросы?
Оставьте нам сообщение, и мы свяжемся с вами в течение следующих 24 часов.
Отправить сообщение
Блог о моторах
-
Топ-8 причин, почему производители роботов выбирают кастомизированные электродвигатели вместо стандартных
-
Как подобрать мотор для роботизированной руки?
-
Сервомотор RDrive для роботов
Rozum Café
-
Как выбрать софт для POS и не облажаться?
-
Фудтех: возможности и сложности
-
Робуста или арабика, что выбрать?
Принципы работы и виды сервоприводов
09. 11.2020
11.2020
Содержание:
Конструкция
Принцип работы
Виды
Сервопривод или шаговый двигатель?
Сравнительный анализ
Выводы
Сервопривод — это механизм с двигателем, в основе работы которого лежит отрицательная обратная связь, что дает возможность точно управлять движениями, задав нужные параметры. По сути, это любой тип механического привода, в котором есть датчик (положения, скорости, усилия и т.д.) и блок управления, сохраняющий заданные показатели на датчике и всем устройстве в автоматическом режиме.
Главная область применения сервоприводов – это робототехника. Также они устанавливаются в станках с ЧПУ, полиграфическом оборудовании, промышленных швейных линиях и на других производствах.
В данной статье мы подробно расскажем Вам о принципах работы и видах сервоприводов.
Конструкция
Устройство современных сервоприводов достаточно просто и при этом эффективно, так как создает условия для точного регулирования их работы.
- привод. Это может быть электродвигатель с редуктором или пневмоцилиндр. Редуктор необходим для уменьшения скорости вращения мотора до тех значений, которые нужны в работе. К выходному валу редуктора прилагается требуемая нагрузка: качалка, вращающийся вал, тянущие или толкающие устройства;
- датчик обратной связи. В качестве него выступает датчик угла поворота выходного вала (энкодер) или потенциометр. Функция – преобразование угла поворота в электрический сигнал;
- блок питания и управления (сервоусилитель, преобразователь частоты, инвертор). Данный элемент принимает и анализирует управляющие импульсы, сравнивает их с показателями датчика, отвечает за пуск и остановку двигателя. В состав блока управления может входить конвертер (датчик управляющего сигнала или воздействия).
Принцип работы
Принцип работы сервоприводов сводится к использованию импульсного сигнала, который изменяется по трем параметрам – частоте повторения, минимальной и максимальной продолжительности. Именно длительность импульса задает угол поворота мотора.
Именно длительность импульса задает угол поворота мотора.
Сигналы, поступающие на сервопривод, имеют стандартную частоту, а их продолжительность может равняться от 0,8 до 2,2 мс (в зависимости от модели). Параллельно с получением управляющего импульса начинается работа генератора опорного импульса, который связан с датчиком обратной связи. Тот, в свою очередь, механически соединен с выходным валом и отвечает за изменение его положения.
Электронный блок анализирует импульсы по длительности и на основе полученных величин определяет разницу между заданным извне положением вала и реальным (измеренным датчиком). С учетом этого происходит корректировка работы путем подачи напряжения на питание двигателя.
Виды
Сервоприводы вращательного движения. Чаще всего используются в полиграфических, упаковочных станках, авиамоделировании. Делятся на:
- синхронные – дают возможность точно задавать степень поворота (с точностью до угловых минут), скорость, ускорение.
 Достигают максимальных оборотов быстрее асинхронных, дороже их в несколько раз;
Достигают максимальных оборотов быстрее асинхронных, дороже их в несколько раз; - асинхронные — позволяют точно выполнять команды скорости даже на малых оборотах.
Сервоприводы линейного движения. Данные устройства могут развивать значительную скорость (до 70 м/с²), что делает их востребованными в автоматах монтажа электронных деталей на печатную плату. Делятся на плоские и круглые модели.
Также сервоприводы классифицируются по принципу действия на электромеханические, где движение обеспечивают мотор и редуктор, и электрогидромеханические, где действует система ил поршня и цилиндра. Вторая группа устройств дает более высокие показатели быстродействия.
Сервопривод или шаговый двигатель?
Сервопривод – это мотор с дополнительным датчиком контроля, обеспечивающим обратную связь. При работе двигатель удерживается в заданном положении, а все отклонения вала фиксируются и исправляются уже на следующем шаге. Шаговый двигатель – это электромотор, функционирующий на основе тандема плата-драйвер и обеспечивающий точность хода только на малых оборотах. Каждый вид оборудования используется в своих целях, и между собой эти виды двигателей не конкурируют.
Каждый вид оборудования используется в своих целях, и между собой эти виды двигателей не конкурируют.
Сравнительный анализ
Факторы выбора между сервоприводом и шаговым двигателем, их преимущества и недостатки наглядно представлены в таблице.
|
Параметр |
Шаговые двигатели |
Сервоприводы |
|
Момент |
Сильно падает с повышением скорости. Максимален при остановленном вале |
Высокий на всех скоростях. Максимален на высоких оборотах |
|
Ускорение |
Инертны, номинальная скорость не превышает 1000 об/мин. При слишком быстром разгоне пропускают шаги, вал может остановиться |
Высокое, способны на короткое время увеличить ток обмоток в 3-4 раза от номинального значения. |
|
Мощность |
Низкая, не превышает 1 кВт |
Высокая, может достигать 15 кВт |
|
Удельная мощность |
Низкая. Очень малый КПД – потребляет много тока, основная часть энергии расходуется в виде тепла |
Высокая. Потребляемый ток пропорционален нагрузке |
|
Обратная связь по положению |
Отсутствует. Не выполненный шаг будет не замечен в системе ЧПУ. Однако, при грамотном проектировании станка обратная связь не нужна |
Есть. Положение вала корректируется во время работы, при сбое обратной связи (например, заклинило вал) система укажет на ошибку |
|
Плавность хода |
Низкая. |
Большая |
|
Точность позиционирования |
Не более 5% от величины шага |
Определяется энкодером |
|
Безопасность |
Высокая. Если вал заклинило, двигатель просто пропустит шаги |
Низкая. При заклинивании вала устройство может провернуть передачу, что приведет к поломке. Может сгореть в случае некорректной настройки поведения драйвера при перегрузке |
|
Сложность настройки |
Просты в настройке, работают по принципу включения и выключения |
Множество настраиваемых параметров, что требует предельной внимательности и опыта в использовании |
|
Резонанс ротора
|
Сильный, что приводит к пропуску шагов, ухудшению качества обработки и др. |
Отсутствует, что делает их моторами выбора в крупном оборудовании (рабочее поле более 1,2 м2, масса свыше 50 кг)
|
|
Звук |
Сильный гул |
Незначительный |
|
Нагрев |
Сильный, что может потребовать дополнительного охлаждения радиатором и вентилятором |
Слабый |
|
Стоимость |
Значительно дешевле сервоприводов, но только до размера фланца 110 мм |
Дороже шаговых моторов, но при размере фланца 110 мм и выше цены схожи |
 Скорость номинального вращения – до 10000 об/мин и выше
Скорость номинального вращения – до 10000 об/мин и выше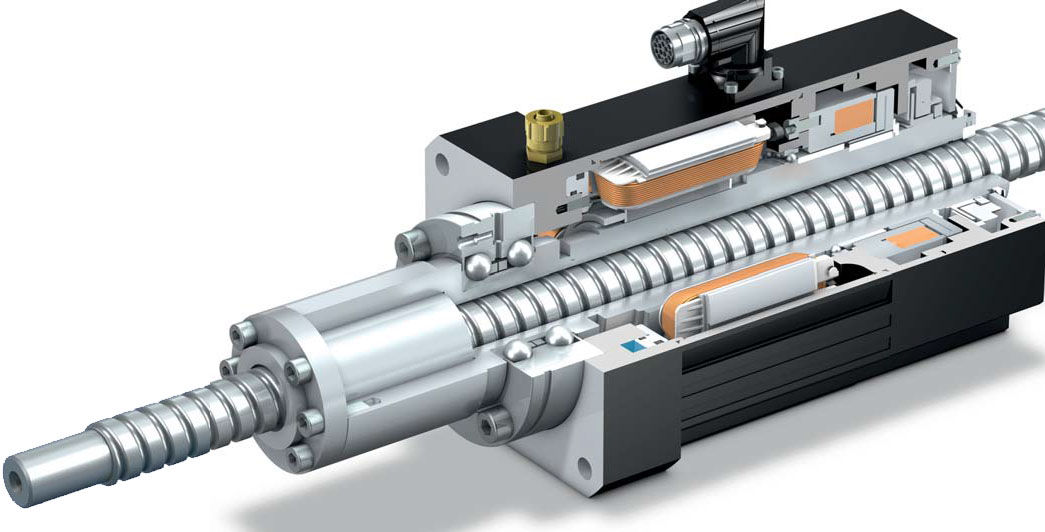 Возможна только при применении дополнительных методов управления
Возможна только при применении дополнительных методов управления , особенно в крупных станках
, особенно в крупных станкахВыводы
Сервопривод и шаговый двигатель выбираются под каждую задачу, причем в одном станке или устройстве могут быть использованы одновременно оба вида.
Сервоприводы востребованы в тех механизмах, где необходимо точное позиционирование узлов для их синхронизации с другими деталями. В частности, сервоприводы широко применяются в обрабатывающих станках. Шаговые двигатели прочно заняли свою нишу в станках с ЧПУ (3D-принтеры, гравировальные машины, оборудование для металлообработки и лазерной резки) и в робототехнике.
Серводвигатель— типы и принцип работы
Серводвигатель — это один из широко используемых приводов с регулируемой скоростью в промышленном производстве, автоматизации процессов и строительных технологиях во всем мире.
Хотя серводвигатели не относятся к определенному классу двигателей, они предназначены и разработаны для использования в приложениях управления движением, требующих высокой точности позиционирования, быстрого реверсирования и исключительной производительности.
Они широко используются в робототехнике, радиолокационных системах, автоматизированных производственных системах, станках, компьютерах, станках с ЧПУ, системах слежения и т. д.
д.
Краткое описание
Что такое серводвигатели?
Серводвигатель представляет собой линейный или поворотный привод, который обеспечивает быстрое и точное управление положением для приложений с обратной связью. В отличие от больших промышленных двигателей, серводвигатель не используется для непрерывного преобразования энергии.
Серводвигатели имеют высокую скорость отклика из-за низкой инерции и имеют малый диаметр и большую длину ротора. Как же тогда работают серводвигатели?
Серводвигатели работают на сервомеханизме, который использует обратную связь по положению для управления скоростью и конечным положением двигателя. Внутри серводвигатель сочетает в себе двигатель, цепь обратной связи, контроллер и другую электронную схему.
Он использует энкодер или датчик скорости для обеспечения обратной связи по скорости и положению. Этот сигнал обратной связи сравнивается с входным командным положением (желаемое положение двигателя, соответствующее нагрузке) и выдает сигнал ошибки (если между ними существует разница).
Сигнала ошибки на выходе детектора ошибок недостаточно для запуска двигателя. Таким образом, детектор ошибок, за которым следует сервоусилитель, повышает уровень напряжения и мощности сигнала ошибки, а затем поворачивает вал двигателя в нужное положение.
Типы серводвигателей
В основном серводвигатели подразделяются на серводвигатели переменного и постоянного тока в зависимости от характера источника питания, используемого для их работы. Серводвигатели постоянного тока с щеточными постоянными магнитами используются для простых приложений из-за их стоимости, эффективности и простоты.
Лучше всего подходят для небольших приложений. С развитием микропроцессоров и силовых транзисторов серводвигатели переменного тока используются все чаще из-за их высокой точности управления.
Серводвигатели постоянного тока
Серводвигатель постоянного тока состоит из небольшого двигателя постоянного тока, потенциометра обратной связи, редуктора, электронной схемы привода двигателя и электронного контура управления с обратной связью.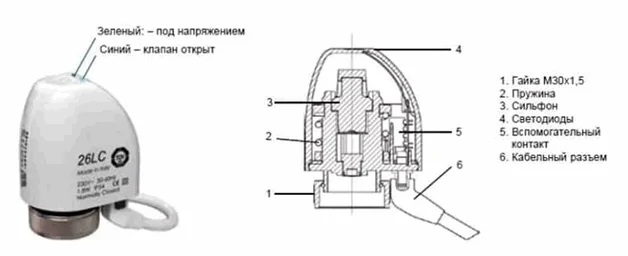 Он более или менее похож на обычный двигатель постоянного тока.
Он более или менее похож на обычный двигатель постоянного тока.
Статор двигателя состоит из цилиндрической рамы и магнита, прикрепленного к внутренней части рамы.
Ротор состоит из щетки и вала. Коллектор и металлическая опорная рама ротора прикреплены к внешней стороне вала, а обмотка якоря намотана на металлическую опорную раму ротора.
Щетка имеет обмотку якоря, которая подает ток на коммутатор. В задней части вала в ротор встроен датчик для определения скорости вращения.
При такой конструкции контроллер легко спроектировать, используя простую схему, поскольку крутящий момент пропорционален величине тока, протекающего через якорь.
А также мгновенная полярность управляющего напряжения определяет направление крутящего момента, развиваемого двигателем. Типы серводвигателей постоянного тока включают серийные двигатели, двигатели с параллельным управлением, двигатели с раздельным управлением и параллельные двигатели с постоянными магнитами.
Принцип работы серводвигателя постоянного тока
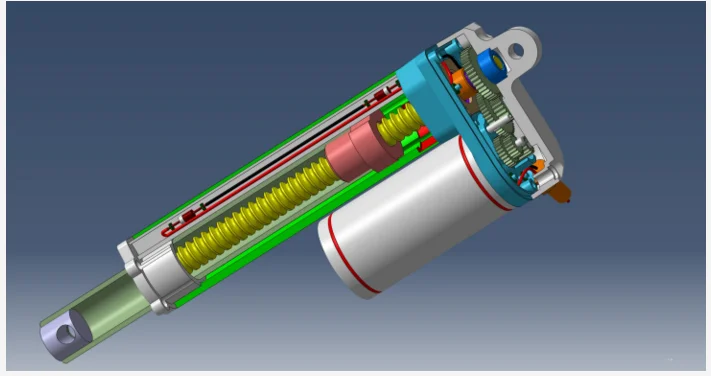
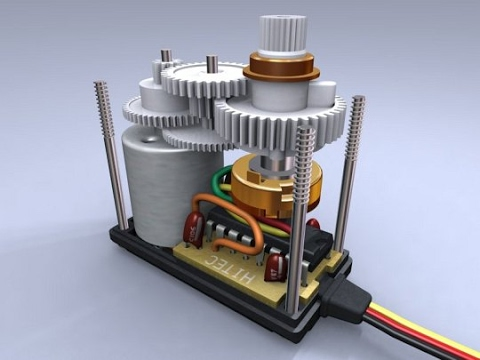
Серводвигатель постоянного тока представляет собой узел из четырех основных компонентов, а именно двигателя постоянного тока, датчика положения, узла редуктора и цепи управления. На приведенном ниже рисунке показаны части, состоящие из серводвигателей RC, в которых используется небольшой двигатель постоянного тока для управления нагрузками с точной скоростью и положением.
Опорное напряжение постоянного тока установлено на значение, соответствующее требуемому выходу. Это напряжение может быть подано с помощью другого потенциометра, преобразователя ширины импульса управления в напряжение или через таймеры в зависимости от схемы управления.
Циферблат на потенциометре создает соответствующее напряжение, которое затем подается как один из входов усилителя ошибки.
В некоторых схемах управляющий импульс используется для создания опорного напряжения постоянного тока, соответствующего требуемому положению или скорости двигателя, и применяется к преобразователю длительности импульса в напряжение.
В этом преобразователе конденсатор начинает заряжаться с постоянной скоростью при высоком импульсе. Затем заряд на конденсаторе подается на буферный усилитель при малом импульсе и далее этот заряд подается на усилитель ошибки.
Таким образом, длина импульса определяет напряжение, подаваемое на усилитель ошибки, в качестве желаемого напряжения для получения желаемой скорости или положения.
В цифровом управлении микропроцессор или микроконтроллер используются для генерации положительных импульсов ШИМ с точки зрения рабочих циклов для получения более точных управляющих сигналов.
Сигнал обратной связи, соответствующий текущему положению груза, получается с помощью датчика положения. Этот датчик обычно представляет собой потенциометр, который вырабатывает напряжение, соответствующее абсолютному углу вала двигателя, через зубчатую передачу. Затем значение напряжения обратной связи подается на вход усилителя ошибки (компаратора).
Усилитель ошибки представляет собой усилитель с отрицательной обратной связью и уменьшает разницу между входными сигналами. Он сравнивает напряжение, связанное с текущим положением двигателя (полученное с помощью потенциометра), с требуемым напряжением, связанным с желаемым положением двигателя (полученное с помощью ширины импульса преобразователя напряжения), и выдает ошибку либо положительного, либо отрицательного напряжения.
Он сравнивает напряжение, связанное с текущим положением двигателя (полученное с помощью потенциометра), с требуемым напряжением, связанным с желаемым положением двигателя (полученное с помощью ширины импульса преобразователя напряжения), и выдает ошибку либо положительного, либо отрицательного напряжения.
Это напряжение ошибки подается на якорь двигателя. Чем больше ошибка, тем больше мощность подается на якорь двигателя.
Пока существует ошибка, усилитель усиливает напряжение ошибки и, соответственно, питает якорь. Двигатель вращается до тех пор, пока ошибка не станет равной нулю. Если ошибка отрицательна, напряжение якоря меняется на противоположное, и, следовательно, якорь вращается в противоположном направлении.
Серводвигатели переменного тока
Серводвигатели переменного тока в основном представляют собой двухфазные асинхронные двигатели с короткозамкнутым ротором и используются для маломощных приложений. В настоящее время трехфазные асинхронные двигатели с короткозамкнутым ротором были модифицированы таким образом, что их можно использовать в сервосистемах большой мощности.
Основное различие между стандартным асинхронным двигателем с расщепленной фазой и двигателем переменного тока заключается в том, что ротор серводвигателя с короткозамкнутым ротором выполнен из более тонких проводящих стержней, так что сопротивление двигателя выше.
В зависимости от конструкции существует два различных типа серводвигателей переменного тока: серводвигатель переменного тока синхронного типа и серводвигатель переменного тока асинхронного типа.
Синхронный серводвигатель переменного тока состоит из статора и ротора. Статор состоит из цилиндрической рамы и сердечника статора. Катушка якоря намотана на сердечник статора, а конец катушки соединен с подводящим проводом, по которому к двигателю подается ток.
Ротор состоит из постоянного магнита, поэтому они не используют ротор индукционного типа переменного тока, в котором индуцируется ток. И, следовательно, их также называют бесщеточными серводвигателями из-за структурных характеристик.
Когда поле статора возбуждено, ротор следует за вращающимся магнитным полем статора с синхронной скоростью. Если поле статора останавливается, ротор также останавливается. С этим ротором с постоянными магнитами ток ротора не требуется и, следовательно, выделяется меньше тепла.
Также эти двигатели имеют высокий КПД за счет отсутствия тока ротора. Чтобы узнать положение ротора по отношению к статору, на ротор помещается энкодер, который действует как обратная связь с контроллером двигателя.
Конструкция серводвигателя переменного тока индукционного типа r идентична конструкции двигателя General. В этом двигателе статор состоит из сердечника статора, обмотки якоря и подводящего провода, а ротор состоит из вала и сердечника ротора, который построен с проводником, подобно ротору с короткозамкнутым ротором.
Принцип работы этого серводвигателя аналогичен обычному асинхронному двигателю. Опять же, контроллер должен знать точное положение ротора, используя энкодер для точного управления скоростью и положением.
Принцип работы серводвигателя переменного тока
Принципиальная схема сервосистемы двухфазного асинхронного двигателя переменного тока показана на рисунке ниже. При этом эталонный вход, при котором вал двигателя должен поддерживать определенное положение, подается на ротор синхрогенератора в качестве механического входа тета. Этот ротор подключен к электрическому вводу при номинальном напряжении на фиксированной частоте.
Три клеммы статора синхронизатора подключаются соответственно к клеммам управляющего трансформатора. Угловое положение двухфазного двигателя передается на ротор управляющего трансформатора через зубчатую передачу и представляет собой условие управления альфа.
Изначально существует разница между положением вала синхрогенератора и положением вала управляющего трансформатора. Эта ошибка отражается в виде напряжения на управляющем трансформаторе. Это напряжение ошибки подается на сервоусилитель, а затем на управляющую фазу двигателя.
При управляющем напряжении ротор двигателя вращается в нужном направлении до тех пор, пока ошибка не станет равной нулю. Таким образом обеспечивается желаемое положение вала в серводвигателях переменного тока.
В качестве альтернативы, современные сервоприводы переменного тока представляют собой встроенные контроллеры, такие как ПЛК, микропроцессоры и микроконтроллеры, для достижения переменной частоты и переменного напряжения для управления двигателем.
В основном для управления требуемой частотой и напряжением используются широтно-импульсная модуляция и пропорционально-интегрально-дифференциальная (ПИД) методика. Блок-схема системы серводвигателя переменного тока с использованием программируемых логических контроллеров, контроллеров положения и сервоконтроллеров приведена ниже.
Разница между серводвигателями постоянного и переменного тока
| Обеспечивает высокую выходную мощность | Обеспечивает низкую выходную мощность от 0,5 Вт до 100 Вт |
| У него больше проблем со стабильностью | У него меньше проблем со стабильностью |
| Требует частого обслуживания из-за наличия коммутатора | Требуется меньше обслуживания из-за отсутствия коммутатора |
| Обеспечивает высокий КПД | КПД серводвигателя переменного тока меньше и составляет от 5 до 20% |
| Срок службы серводвигателя постоянного тока зависит от срока службы щеток | Срок службы серводвигателя переменного тока зависит от срока службы подшипника |
В конструкцию входит постоянный магнит.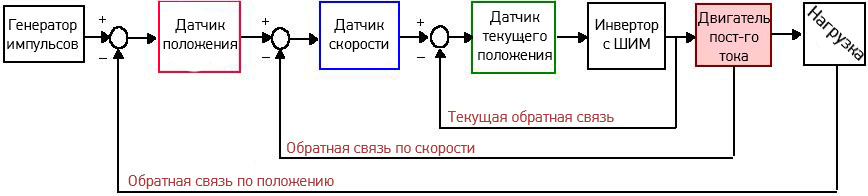 | Серводвигатель переменного тока синхронного типа использует постоянный магнит, в то время как для асинхронного типа он не требуется. |
| Эти двигатели используются для приложений высокой мощности | Эти двигатели используются для приложений малой мощности |
Что такое серводвигатель и как он работает. Основные типы
23.08.2021
Когда дело доходит до управления моторным приводом, обычно для этого используется серводвигатель. Что такое серводвигатель и как он работает? Серводвигатель — это привод, вал которого может принимать заданное положение или поддерживать заданную скорость вращения. Другими словами, сервовалом можно управлять, например, задав ему положение в градусах или определенную скорость вращения.
Проще говоря, что такое серводвигатель? Это механизм, имеющий в своем устройстве специальный датчик, по которому отслеживаются определенные значения, блок управления и сам мотор. Задача устройства – контролировать и поддерживать параметры во время работы в зависимости от передаваемого сигнала в отдельный момент времени.
Задача устройства – контролировать и поддерживать параметры во время работы в зависимости от передаваемого сигнала в отдельный момент времени.
Принцип работы серводвигателя довольно прост. Работа устройства происходит по принципу обратного взаимодействия с сигналами системы. Сервопривод в определенный момент времени получает входящие параметры управляющего значения и поддерживает его на выходе производимого элемента. При включении электродвигателя начинается вращение выходного вала. К нему можно что-то подключить или прикрепить, в дальнейшем планируется им управлять.
Сервопривод получает указанное значение, после чего сравнивает это значение со значением на своем датчике. В случае несоответствия блок управления стремится достичь и поддерживать заданное значение, чтобы оно совпадало со значением, поступающим от датчика.
Основные принципы конструкции серводвигателя
По сути, сам привод представляет собой электродвигатель с редуктором, именно электродвигатель преобразует электричество в механическое действие.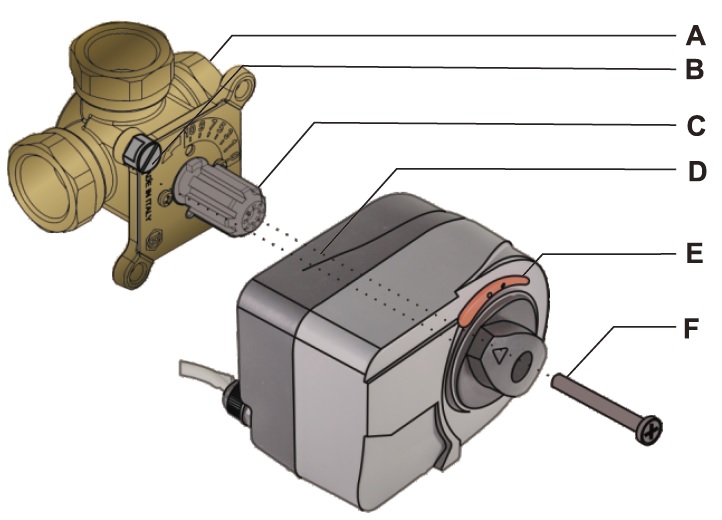 Но скорость вращения мотора не всегда подходит для достижения целей. Для возможности управления вращением двигателя используется редуктор. В результате он снижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует результат, полученный на выходе.
Но скорость вращения мотора не всегда подходит для достижения целей. Для возможности управления вращением двигателя используется редуктор. В результате он снижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует результат, полученный на выходе.
В схематическом варианте основные части каждого серводвигателя включают :
- Сам привод, представляющий собой электродвигатель с редуктором или сопутствующими устройствами. В нем требуется снижение скорости движения, если она слишком большая.
- Датчик обратной связи или потенциометр, изменяющий угол поворота вала.
- Блок, отвечающий за управление и питание.
- Преобразователь или вход.
Для чего используются серводвигатели?
Для чего служат серводвигатели – это вопрос, с которым мы регулярно сталкиваемся в Элтра-Трейд. В общем, мы можем сказать, что это устройство, которое сильно изменит вашу жизнь.
Серводвигатели используются в самых разных областях, например, в робототехнике, они помогают моделировать различные движения роботов.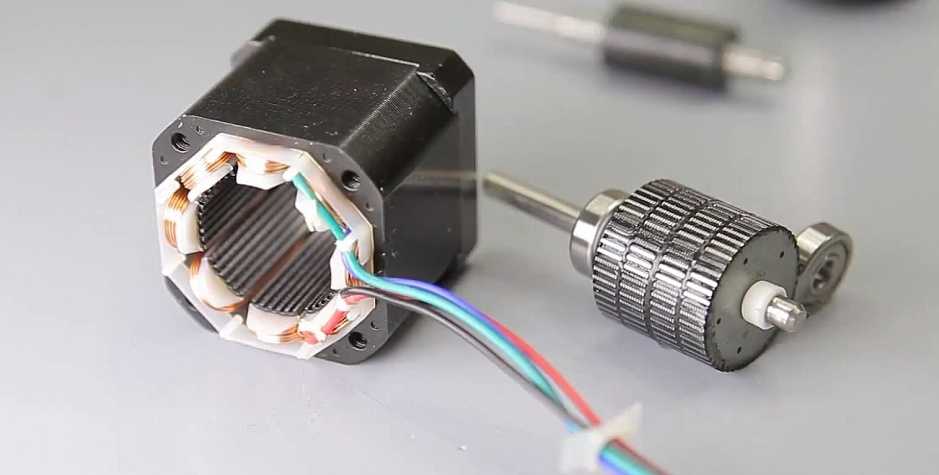 Сервоприводы — эффективное решение для перемещения механизмов в пространстве.
Сервоприводы — эффективное решение для перемещения механизмов в пространстве.
Встречаются в прецизионных приборах, автоматах, системах производства различных плат, программируемых машинах, промышленных роботах и других механизмах. Двигатели этого типа получили широкое распространение в авиастроении благодаря эффективному энергопотреблению и равномерному движению.
Благодаря совместимости современных цифровых серводвигателей, например серводвигателей Siemens, с современными операционными интерфейсами, их использование в роботизированных решениях для промышленности является ценным. Для достижения различных целей робототехники к программируемому контроллеру Arduino можно подключить сервопривод. Подключение осуществляется через кабели, которые идут от серводвигателя. Обычно это три кабеля: красный; коричневый или черный; желтый, оранжевый или белый. Красный кабель отвечает за соединение сервопривод. Коричневый используется для заземления. Желтый подключается напрямую к плате Arduino и предназначен для передачи управляющего сигнала.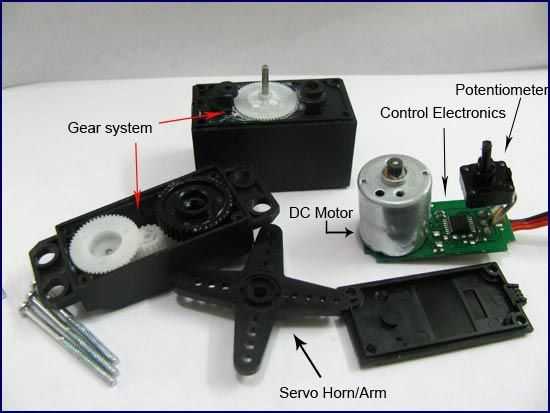
Кроме того, почти каждый современный серводвигатель может быть подключен к цифровым операционным интерфейсам, таким как Profibus, PROFInet, DeviceNet и другим. Это позволяет использовать их во многих промышленных системах, управляемых машинным интеллектом.
Типы серводвигателей
Помимо их возможностей, говоря о применении серводвигателей, необходимо учитывать несколько типов этих устройств. В общем, существует несколько классификаций типов серводвигателей.
- Существует два основных типа серводвигателей в зависимости от принципа их работы: серводвигатели переменного и постоянного тока . Что такое серводвигатель переменного тока? Это те моторы, которые способны сохранить работу двигателя даже на низких оборотах. Что такое серводвигатель постоянного тока? Эти устройства задают скорость вращения двигателя и другие параметры, быстрее достигая заданной скорости вращения.
- Еще одним фактором, разделяющим несколько вариантов сервоприводов, являются их конструктивные особенности .
 По ним все серводвигатели делятся на электромеханические и электрогидромеханические.
По ним все серводвигатели делятся на электромеханические и электрогидромеханические. - По способу передачи данных все сервоприводы также классифицируются на аналоговые и цифровые устройства . Они почти не отличаются друг от друга по внешнему виду.
Основное отличие заключается в принципе управления двигателем. У аналоговых серводвигателей управление происходит специальной микросхемой, у цифровых сервоприводов микропроцессор. Микросхема и микропроцессор способны принимать и анализировать управляющие импульсы. Только на микросхему они обычно идут с частотой 50 Гц, а на микропроцессор — с частотой 200 Гц и более. В результате цифровой сервопривод более мобилен и более понятен управляющему сигналу.
Если подвести итоги, то серводвигатели — это шаг в новое будущее для промышленных систем. В связи с активным внедрением автоматизации в производство они приобретают особое значение. А возможность подключения такого сервопривода к современным интерфейсам систем управления позволяет значительно ускорить производственные процессы, придать им точность и расширить производственные возможности.
Возможность достижения высокой точности часто становится решающим фактором для применения сервоприводов. Кроме того, благодаря новым цифровым разработкам, позволяющим обеспечить различные способы связи с объектами, система использует компьютер для управления и настройки, что значительно упрощает работу. А самое главное, благодаря точному контролю оборотов серводвигателя, двигатели позволяют существенно сэкономить. Это энергоэффективное решение, которое уже применялось в таких инновационных отраслях, как робототехника, автоматизированные системы управления производством, контроль качества и других отраслях.
В нашем интернет-магазине Элтра-Трейд вы можете приобрести самые точные, экономичные и прибыльные серводвигатели производства Siemens, Schneider Electric, ABB и других. Хотите получить еще больше информации о серводвигателях? Просто свяжитесь с нами, чтобы получить полноценную консультацию о серводвигателях и их использовании в современных отраслях.