Принципы работы и виды сервоприводов
Отличительной особенностью сервопривода является возможность управления через отрицательную обратную связь с использованием заданных параметров. Все оборудование данного типа можно разделить на две группы – сервоприводы постоянного тока и трехфазные сервоприводы переменного тока.
Устройство сервоприводов постоянного тока
Как правило, сервоприводы постоянного тока используются в маломощных устройствах позиционирования. Классическая область их применения – робототехника.
Конструкция современных сервоприводов довольно проста, но при этом весьма эффективна, так как позволяет обеспечить максимально точное управление движением. Сервопривод состоит из:
- двигателя постоянного тока
- шестерни редуктора
- выходного вала
- потенциометра
- платы управления, на которую подается управляющий сигнал
Двигатель и редуктор образуют привод. Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Для того, чтобы угол поворота превратить в электрический сигнал, необходим датчик. Его функции в сервоприводе постоянного тока с успехом выполняет потенциометр. Он выдает аналоговый сигнал (как правило, от 0 до 10 В) с дискретностью, ограниченной АЦП (аналогово-цифровым преобразователем), на который поступает этот сигнал.
Самой важной деталью сервопривода, пожалуй, является электронная плата сервоусилителя, которая принимает и анализирует управляющие импульсы, соотносит их с данными потенциометра, отвечает за запуск и выключение двигателя.
Принцип работы
Принцип действия устройств основан на использовании импульсного сигнала, который имеет три важные характеристики – частоту повторения, минимальную и максимальную продолжительность. Именно продолжительность импульса определяет угол поворота двигателя.
Импульсные сигналы, получаемые сервоприводом, имеют стандартную частоту, а вот их продолжительность в зависимости от модели может составлять от 0,8 до 2,2 мс. Параллельно с поступлением управляющего импульса активируется работа генератора опорного импульса, который связан с потенциометром. Тот, в свою очередь, механически сопряжен с выходным валом и отвечает за корректирование его положения.
Электронная схема анализирует импульсы с учетом длительности и на основе разностной величины определяет разницу между ожидаемым (заданным) положением вала и реальным (измеренным при помощи потенциометра). Затем производится корректировка путем подачи напряжения на питание двигателя.
Основные положения устройства
Если продолжительность опорного и управляющего импульсов совпадает, наступает так называемый нулевой момент. В это время двигатель сервопривода не работает, вал привода находится в исходном (неподвижном) положении.
При увеличении длительности управляющего импульса плата фиксирует разбежку показателей, двигатель получает напряжение и приходит в движение. В свою очередь, редуктор начинает воздействовать на выходной вал, который поворачивается таким образом, чтобы достигнуть увеличения продолжительности опорного импульса. Как только он сравняется с управляющим импульсом, двигатель прекратит свою работу.
При уменьшении длительности управляющего импульса происходит все то же самое, только с точностью до наоборот, так как двигатель начинает вращаться в обратную сторону. Как только импульсы сравнялись, двигатель останавливается.
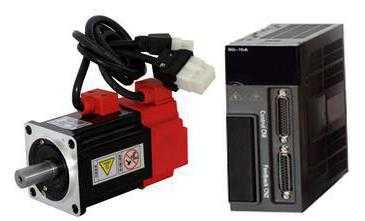
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Режимы управления
Существуют три основных режима работы сервопривода переменного тока.
Режим управления положением. Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Комбинация импульсов для управления положением может передавать информацию не только по положению, но также по скорости и направлению вращения двигателя. Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Как правило, во всех сервоусилителях входы управления именуются как PULSE, SIGN.
Режим управления скоростью. В данном случае управление производится аналоговым сигналом. Значения скорости также могут переключаться на фиксированные величины подачей сигналов на соответствующие дискретные входы. В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
Режим управления скоростью схож с работой асинхронного двигателя, управляемого преобразователем частоты. Задаются такие параметры, как время разгона и замедления, максимальная и минимальная скорости и другие.
Режим управления моментом.
В этом режиме двигатель может вращаться либо стоять на месте, но при этом момент на валу будет заданным. Управление может производиться дискретным либо аналоговым двухполярным сигналом. Этот режим может использоваться для машин, где необходимо менять усилие прижима, давление и т. п.
Оценка текущего момента двигателя, необходимого для управления, производится за счет встроенного датчика тока.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Сервопривод или шаговый двигатель?
Принципы программирования ПЛК
tehprivod.su
подключение, управление, скетчи Ардуино [Амперка / Вики]
В данной статье рассматриваются сервоприводы: их устройство, предназначение, подсказки по подключению и управлению, разновидности сервоприводов и их сравнение. Давайте приступим и начнём с того, что же такое сервопривод.
Понятие сервопривода
Под сервоприводом чаще всего понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение. Однако, это не совсем полное определение.
Если сказать полнее, сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервоприводом является любой тип механического привода, имеющий в составе датчик (положения, скорости, усилия и т.п.) и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике и устройстве согласно заданному внешнему значению.
Иными словами:
Сервопривод получает на вход значение управляющего параметра. Например, угол поворота
Блок управления сравнивает это значение со значением на своём датчике
На основе результата сравнения привод производит некоторое действие, например: поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра
Наиболее распространены сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
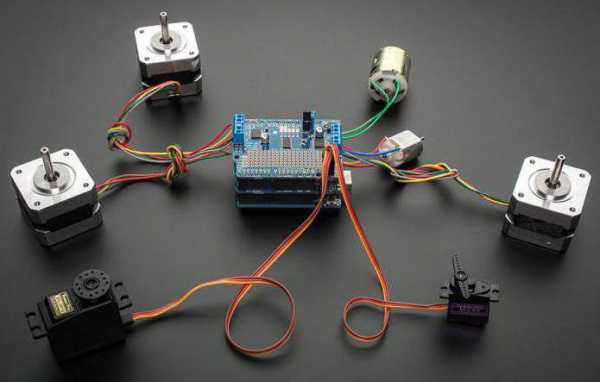
Типичный хобби-сервопривод изображён ниже.
Каким же образом устроены сервоприводы?
Устройство сервопривода
Сервоприводы имеют несколько составных частей.
Привод — электромотор с редуктором. Чтобы преобразовать электричество в механический поворот, необходим электромотор. Однако зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять. Однако, для того чтобы положение контролировалось устройством, необходим датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Теперь давайте посмотрим, как управлять сервоприводом извне.
Управление сервоприводом. Интерфейс управляющих сигналов
Чтобы указать сервоприводу желаемое положение, по предназначенному для этого проводу необходимо посылать управляющий сигнал. Управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
Чаще всего в хобби-сервах импульсы производятся с частотой 50 Гц. Это значит, что импульс испускается и принимается раз в 20 мс. Обычно при этом длительность импульса в 1520 мкс означает, что сервопривод должен занять среднее положение. Увеличение или уменьшение длины импульса заставит сервопривод повернуться по часовой или против часовой стрелки соответственно. При этом существуют верхняя и нижняя границы длительности импульса. В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Также стоит отметить, что это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов немного отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
На что ещё стоит обратить внимание, так это на путаницу в терминологии. Часто способ управления сервоприводами называют PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation). В нём крайне важна длина импульсов и не так важна частота их появления. 50 Гц — это норма, но сервопривод будет работать корректно и при 40, и при 60 Гц. Единственное, что нужно при этом иметь в виду — это то, что при сильном уменьшении частоты он может работать рывками и на пониженной мощности, а при сильном завышении частоты (например, 100 Гц) может перегреться и выйти из строя.
Характеристики сервоприводов
Теперь давайте разберёмся, какие бывают сервоприводы и какими характеристиками они обладают.
Крутящий момент и скорость поворота
Сначала поговорим о двух очень важных характеристиках сервопривода: о крутящем моменте и о скорости поворота.
Момент силы, или крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Проще говоря, эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё несложно вычислить скорость в более привычной величине, оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют такую единицу.
Стоит отметить, что иногда приходится искать компромисс между этими двумя характеристиками, так как если мы хотим надёжный, выдерживающий большой вес сервопривод, то мы должны быть готовы, что эта могучая установка будет медленно поворачиваться. А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
Конечно, мы всегда можем взять установку, потребляющую большую мощность, главное, чтобы её характеристики удовлетворяли нашим потребностям.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов. Их можно разделить на:
маленькие
стандартные
большие
Обладают они при этом следующими характерными габаритами:
| Вес | Линейные размеры | |
|---|---|---|
| маленькие | 8-25 г | 22×15×25 мм |
| стандартные | 40-80 г | 40×20×37 мм |
| большие | 50-90 г | 49×25×40 мм |
Бывают ещё так называемые сервоприводы «специального вида» с габаритами, не попадающими в данную классификацию, однако процент таких сервоприводов весьма мал.
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
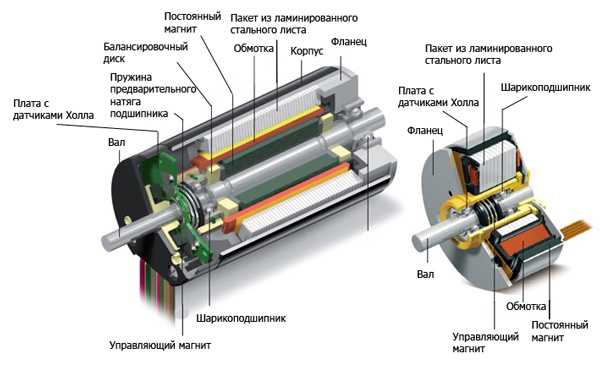
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Подключение к Arduino
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту
5Vили напрямую к источнику питаниякоричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Функционал библиотеки Servo
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого заводится переменная типа Servo. Управление осуществляется следующими функциями:
attach()— присоединяет переменную к конкретному пину. Возможны два варианта синтаксиса для этой функции:servo.attach(pin)иservo.attach(pin, min, max). При этомpin— номер пина, к которому присоединяют сервопривод,minиmax— длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно.write()— отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис следующий:servo.write(angle), гдеangle— угол, на который должен повернуться сервопривод.writeMicroseconds()— отдаёт команду послать на сервоприводимульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий:servo.writeMicroseconds(uS), гдеuS— длина импульса в микросекундах.read()— читает текущее значение угла, в котором находится сервопривод. Синтаксис следующий:servo.read(), возвращается целое значение от 0 до 180.attached()— проверка, была ли присоединена переменная к конкретному пину. Синтаксис следующий:servo.attached(), возвращается логическая истина, если переменная была присоединена к какому-либо пину, или ложь в обратном случае.detach()— производит действие, обратное действиюattach(), то есть отсоединяет переменную от пина, к которому она была приписана. Синтаксис следующий:servo.detach().
Пример использования библиотеки Servo
- servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(0); myservo2.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500); }
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками/ передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
- servo2_example.ino
// подключаем библиотеку для работы с сервоприводами // данная библиотека совместима с библиотекой «VirtualWire» // для работы с приёмником и передатчиком на 433 МГц #include <Servo2.h> // создаём объект для управления сервоприводом Servo2 myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Вместо заключения
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
wiki.amperka.ru
что это такое? Устройство, установка и принцип работы сервопривода
Многие задают вопрос: сервопривод — что это такое? Классическая конструкция сервопривода включает в себя двигатель, датчик позиционирования и трехконтурную управляющую систему (регуляция позиции, скорости и тока).

Слово «серво» имеет латинское происхождение «servus», дословно переводится как «раб», «помощник», «прислужник».
В машиностроительной отрасли устройства выступали в роли вспомогательных компонентов (привод подачи в станке, роботе и т.д.). Однако сегодня ситуация поменялась, и главное назначение сервопривода заключено в реализации в области сервомеханизмов.
Установка сервопривода оправдана в том случае, когда обычные преобразователи частоты регулируют точность работы в недостаточной мере.
Применение приборов высокого качества необходимо в оборудовании, отличающемся высоким уровнем производительности.
В этой статье будет рассказано про сервопривод, что это такое и как он функционирует.
Области использования устройства
В современном мире, когда автоматизация заняла прочные позиции во всех областях машиностроения, конструкция всех механизмов заметно унифицировалась. При этом применяются современные индивидуальные приводы.
Для того, чтобы понять, сервопривод, что это такое, следует знать сферу применения устройства.
Устройства содержат прецизионные конструкции поддержания скорости в промышленных роботах и станках с высокой точностью. Они монтируются на сверлильных оборудованиях, в различных системах транспорта и механизмах вспомогательного характера.
Самое широкое применение приборы нашли в следующих сферах:
- изготовление бумаги и упаковок;
- изготовление листов из металла;
- обрабатывание материалов;
- производство транспортного оборудования;
- деревообрабатывающая промышленность;
- изготовление стройматериалов.
Сервоприводы на багажник автомобиля
Существует множество моделей сервоприводов для багажника машины от разных производителей. Рассмотрим функциональность такого устройства, как сервопривод багажника от отечественного производителя «Автозебра». Устройство рассчитано на российские автомобили, но не только. К примеру, оно может использоваться в автомобиле «Рено Логан».

По отзывам пользователей, эта конструкция отличается удобством. Она позволяет, не выходя из авто, осуществлять открывание и закрывание багажника.
Управление устройством осуществляет посредством кнопки, вмонтированной в салон автомобиля или же в брелок сигнализации.
Причина широкого использования прибора
Причиной частого применения сервоприводов стали:
- возможность получения управления, отличающегося высокой точностью и стабильным функционированием;
- широкий диапазон контроля скорости;
- высокий уровень устойчивости к помехам;
- маленький размер и вес устройства.
Принцип функционирования сервопривода
Как же работает устройство? Сервопривод, принцип работы которого основан на обратной связи с одним или более системными сигналами, регулирует объект. Выходной показатель устройства поступает на вход, где идет сравнение с задающим действием.
Особенности механизма
Устройство сервопривода обладает двумя основными особенностями:
- способностью повышать мощность;
- обеспечением обратной информационной связи.
Усиление требуется с той целью, что нужная на выходе энергия очень высока (поступает из внешнего источника), а на входе ее показатель незначителен.
Обратная связь — это не что иное, как контур с замкнутой схемой, в котором сигналы не согласованы на входе и выходе. Этот процесс применяется для управления.
Отсюда вытекает вывод: контур при прямом направлении служит передатчиком энергии, а при обратном направлении — передатчиком информации, которая нужна для точности управления.
Питание и цоколевка разъемов устройства
Сервопривод, принцип работы которого применим в радиоуправляемых конфигурациях, обычно обладает тремя проводами:
- Сигнализирующим. По нему осуществляется передача управляющего импульса. Как правило, провод окрашен в белый, желтый или же красный цвет.
- Питающим. Показатель его мощности составляет от 4,8 до 6 В. Зачастую, это красный провод.
- Заземляющим. Провод черный или коричневый.

Размеры приводов
По размерам агрегаты подразделяются на три категории:
- микроприводы;
- стандартные модификации;
- крупные устройства.
Встречаются сервоприводы и с другими показателями размеров, однако вышеперечисленные виды составляют 95% от всех устройств.
Основные характеристик изделия
Работа сервопривода характеризуется двумя основными показателями: скоростью поворота и усилия на валу. Первая величина служит показателем времени, которое измеряется в секундах. Усилие мерится в кг/см, то есть, какой уровень усилия развивает механизм от центра вращения.

Вообще данный параметр находится в зависимости от основного назначения устройства, а уже потом от числа передач редуктора и используемых в устройстве узлов.
Как уже упоминалось, сейчас выпускают механизмы, функционирующие при показателе напряжения питания от 4,8 до 6 В. Чаще этот показатель равен 6 В. Однако не все модели рассчитаны на широкий диапазон напряжений. Иногда двигатель сервопривода работает лишь при 4,8 В или же только при 6 В (последние конфигурации производятся крайне редко).

Аналоговые и цифровые модификации
Несколько лет тому назад все сервосхемы были аналоговыми. Сейчас появились и цифровые конструкции. В чем же разница их работы? Давайте обратимся к информации официального характера.
Из отчета фирмы Futaba следует, что за последнее десятилетие сервоприводы стали отличаться более хорошими техническими показателями, чем раньше, а также малыми размерами, высоким уровнем скорости вращения и показателем элементов кручения.
Последний виток развития — появление устройства на цифровой основе. Эти агрегаты обладают существенными преимуществами даже перед моторами коллекторного типа. Хотя имеются и некоторые минусы.
Внешне аналоговые и цифровые устройства неразличимы. Отличия фиксируются лишь на платах устройств. Вместо микросхемы на цифровом агрегате можно увидеть микропроцессор, анализирующий сигнал приемника. Он и управляет двигателем.
Совершенно неправильно говорить о том, что аналоговая и цифровая модификация в корне различаются при функционировании. Они могут обладать одинаковыми двигателями, механизмами и потенциометрами (переменными резисторами).
Основным отличием является способ переработки поступающего сигнала приемника и управление двигателем. В оба сервопривода поступает одинаковый по мощности сигнал радиоприемника.
Таким образом, становится понятно, сервопривод, что это такое?
Принцип работы аналоговой модификации
В аналоговой модификации полученный сигнал сравним с текущим положением сервомотора, а затем на двигатель поступает сигнал усилителя, вызывающий перемещение двигателя в заданную позицию Показатель частоты процесса составляет 50 раз за одну секунду. Это минимальный показатель времени реагирования. Если же вы отклоните ручку на передатчике, то на сервопривод начнут поступать короткие импульсы, промежуток между которыми станет равняться 20 м/сек. Между импульсами на мотор ничего не поступает, и воздействие извне может изменить функционирование устройства в любую сторону. Этот временной промежуток называется «мертвая зона».
Принцип работы цифровой конструкции
Цифровыми устройствами используется специальный процессор, функционирующий на высоких частотах. Он обрабатывает сигнал приемника и посылает импульсы управления в двигатель с показателем частоты в 300 раз в секунду. Так как показатель частоты значительно выше, то и реакция заметно быстрее и держит позицию лучше. Это вызывает оптимальное центрирование и высокий уровень кручения. Но такой метод требует больших затрат энергии, поэтому батарея, используемая в аналоговом механизме, в этой конструкции будет разряжаться намного быстрее.
Однако все пользователи, которые хоть однажды столкнулись с цифровой моделью, говорят о том, что ее различие с аналоговой конструкцией настолько значительно, что они никогда бы больше не употребляли последнюю.
Заключение
Вашим выбором станут цифровые аналоги, если вам требуются:
- высокий уровень разрешающей способности;
- минимальное количество «мертвых зон»;
- точный уровень позиционирования;
- быстрая реакция на команду;
- беспеременное усилие на валу при повороте;
- высокий уровень мощности.
Теперь вы знаете, что такое сервопривод и как его использовать.
fb.ru
Серводвигатели
Современные технологии требуют использования более совершенных приводов. Объективным решением является использование серводвигателей. Они способны обеспечить высокую работоспособность оборудования, при этом производя минимум шума. Для более ровного хода сервомотора используются инверторы, обеспечивающие плавные переходы между ходовыми режимами. Главным преимуществом такого двигателя является широкий спектр характеристик, которые, можно изменять дистанционно.
Устройство и разновидности серводвигателей
Конечно же, серводвигатели, как и любое наиболее современное оборудование, имеют несколько классификаций, которые способствуют выбору наиболее оптимального варианта. Таким образом, серводвигатели делятся на два основных подвида:
1. Коллекторные. В качестве питания используется лишь постоянный ток.
2. Безколлекторные. Возможно использования как переменного, так и постоянного тока.

АС-маркировка серводвигателей переменного тока. Такой вид двигателей является более дешёвым. На рынке представлены два вида серводвигателей переменного тока:
1. Синхронный. Вращение ротора и магнитного поля совпадают и имеют одно направление относительно статора.
2. Асинхронный. Направление вращения ротора противоположно вращению магнитного поля.
При этом управление асинхронными устройствами, осуществляется за счёт изменений параметров подаваемого тока.

DC — такую маркировку имеют серводвигатели, обладающие, в качестве привода, постоянной подачей тока. Такие серводвигатели чаще всего применяют для непрерывной работы, так как они более стабильны. Однако управление такого рода двигателями также осуществляется за счёт изменения параметров подаваемого тока.
Принцип работы и управление серводвигателями
Конечно же, довольно важно рассмотреть общие аспекты работы серводвигателей, ведь вне зависимости от приводящих механизмов, важна их техническая составляющая.
Первым аспектом, который важно отметить является условие работы серводвигателя строго в системе G-кодов. Другими словами движущие элементы двигателя ориентируются по 3 основным осям координат (соответственно это X,Y,Z). При этом за разность в значениях координат отвечают импульсы энергии, которые подаются на двигатель. При каком-либо смещении, относительно оси координат, рабочие параметры серводвигателя также изменяются.
Системы ЧПУ, при работе таких механизмов, как серводвигатели, остаются идеально сбалансированными, что обеспечивает высокую производительность без потерь в качестве. Однако не стоит полностью полагаться на датчики ЧПУ и необходимо самостоятельно проверять работу серводвигателей. При всей надёжности подобного оборудования контроль оператора ЧПУ необходим, при этом желательно, чтобы работник (оператор) имел специальное образование.

В соответствии с вышеприведёнными данными, использование таких устройств, как серводвигатели, на оборудовании ЧПУ является наиболее эффективным. При их эксплуатации повышается не только качество продукции, но и максимально оптимизируется труд операторов. Кроме того, более совершенные приводы оборудования, несомненно, повышают его производительность, что имеет большую степень значения для компаний-производителей, не имеющих обширных производственных площадей и прочих территориальных и финансовых возможностей. При всём этом количество сотрудников не возрастёт.
Стоимость серводвигателей определяется мощностью устройства, так как мощностной уровень сказывается на производительности функционирования всего оборудования, работающего при помощи данных механизмов. Также, немалую роль играет компактность и легкость в установочном обслуживании серводвигателей.
promplace.ru
принципиальное устройство и компоненты сервосистем
Сервопривод — самый передовой и современный вид двигателя. Он предназначен для использования в сферах управления движением, нуждающихся в высокой точности позиционирования. Знание того, как работает сервопривод, позволяет понять его растущую востребованность в автоматизации промышленных процессов и потребительской технике.
Доцифровая эра
Название Le-Servomoteur впервые использовалось Жозефом Фарко в 1868 году для описания гидравлических и паровых двигателей, применяемых в судостроении. Фактическое значение этого слова утрачено со временем, но можно предположить, что оно представляло собой каламбур из французского cerveau (мозг) и латинского servus (служить). В широком смысле этот термин был введён не для подчёркивания полезности или сложности моторов, а акцентировал внимание на их свойстве служить командам комплекса управления движителем. То есть привод имеет обратную связь с остальной системой и откликается на её сигналы.
В 1898 году Тесла экспериментировал с беспроводным управлением моделями кораблей, оснащёнными контакторными серводвигателями, а в 1911 Хобарт уже поместил термин «серводвигатель» в свой словарь. К 1915 году это слово прочно закрепилось в среде англоязычных инженеров-электриков, несмотря на французское происхождение. Дальнейшее развитие технологии до Второй мировой войны происходило более чем стремительно:
- 1
 916 — запатентована пневматическая торпеда, в которой руль подчинялся сервомеханизму;
916 — запатентована пневматическая торпеда, в которой руль подчинялся сервомеханизму; - 1922 — General Electric начала работы над сервомашинами для управления морскими орудиями;
- 1925 — создан электронный орудийный сервопривод, использующий пропорциональный контроль и положительную обратную связь;
- 1933 — представлен ленточный регистратор для записи диаграмм с сервомеханизмом постоянного тока.
- 1935 —испытан первый шаговый двигатель в качестве дистанционного повторителя положения компаса и прицела пушки.
Эволюция точности
Шаговые двигатели использовались во время Второй мировой войны и после её окончания в ограниченном количестве. В 60-х годах прошлого столетия они пережили несколько усовершенствований и были повсеместны более двух десятков лет в качестве незаменимых элементов беспилотного управления, индикаторов сортировки вагонов и станций взвешивания, цифровых дифференциальных высотомерах и компьютерной периферии.
Первые бесколлекторные двигатели были разработаны в середине 50-х годов. Устранение механических щёток позволяло им работать в течение удивительно долгого времени с высокой надёжностью. У шаговых моторов появился сильный конкурент. Бесколлекторные двигатели оказались незаменимы в освоении космоса, что и определило их бурное развитие.
Появление доступных способов производства редкоземельных кобальтовых магнитов в 1960-х стало главной базой для технологического рывка моторов постоянного тока. Именно они, оснащённые приводами с контролируемой обратной связью, составляют бо́льшую часть производимых в мире серводвигателей. Микропроцессоры ворвались на рынок автоматики в начале 1970-х и смогли обеспечить почти идеальный контроль над движением механизмов.
Устройство и типы
Сервоприводом называют устройство, предназначенное совершать механическое действие с высокой точностью под непрерывным самоконтролем целевой позиции и параметров движения. Наличие системы обратной связи с чувствительным устройством для исправления отклонений от заданных параметров отличает его от других типов приводов. В более широком смысле этим термином обозначают современные электродвигатели, оснащённые сервоприводами. Упрощённо устройство сервопривода можно описать как замкнутую систему из четырёх элементов:
- датчик;
- двигатель;
- контроллер;
- система обратной связи.
Принцип работы серводвигателя выглядит так: на вход устройства подаётся команда к назначению нового состояния (координат, скорости и т. п. ), прибор определяет текущее значение, сравнивает его с поступившим и производит управляющее воздействие на двигатель для уменьшения их разности.
 Благодаря способностям поддерживать и контролировать заданные параметры, сервомеханизмы считаются наиболее передовыми приводами. Современные устройства сильно изменились в сравнении с первыми поколениями. Теперь это интеллектуальные приборы, выполненные с применением последних достижений в производстве магнитов и процессорной техники. В XXI веке прогресс позволил удешевить в несколько раз простые устройства без потери их качеств и создать технически сложные приводы переменной скорости и высокой точности для таких требовательных отраслей, как станкостроение.
Благодаря способностям поддерживать и контролировать заданные параметры, сервомеханизмы считаются наиболее передовыми приводами. Современные устройства сильно изменились в сравнении с первыми поколениями. Теперь это интеллектуальные приборы, выполненные с применением последних достижений в производстве магнитов и процессорной техники. В XXI веке прогресс позволил удешевить в несколько раз простые устройства без потери их качеств и создать технически сложные приводы переменной скорости и высокой точности для таких требовательных отраслей, как станкостроение.
В современной промышленности используют два типа серводвигателей: линейные и поворотные. Линейные позволяют добиться:
- больших скоростей и ускорений;
- высокой точности позиционирования.
Они обладают неоспоримыми преимуществами, но тем не менее популярны именно роторные сервоприводы. Это обусловлено главным образом тем, что линейные имеют склонность к перегреву. Тепло вызывает нежелательное расширение, создавая нагрузку на подшипники, смазку и датчики. С течением времени это негативно сказывается на продолжительности жизни компонентов.
Роторные двигатели делятся, в свою очередь, на сервоприводы позиционного и непрерывного вращения. Устройства позиционного вращения — самый распространённый тип. Выходной вал работает только в секторе круга, ограниченный физическими стопорами для предотвращения поворота за конструктивно заданные пределы.
Моторы непрерывного вращения очень похожи на позиционные с той разницей, что имеют возможность вращаться в любом направлении с разной скоростью в зависимости от входного сигнала.
Преимущества роторных серводвигателей, с точки зрения управления, выглядят так:
- крутящий момент пропорционален току;
- скорость пропорциональна приложенному напряжению.
 И первые, и вторые востребованы в применении от детских игрушек до космической робототехники.
И первые, и вторые востребованы в применении от детских игрушек до космической робототехники.
Сервоприводы, конечно же, продолжают совершенствоваться. Они появились и эволюционировали как результат тенденции к децентрализации автоматизированных систем. Удешевление процессоров ускоряет этот процесс. Количество функций, выполняемых современными сервоприводами, растёт и, судя по всему, будет продолжать расти. Новейшие устройства уже наделяются способностями к самонастройке и оптимизации параметров управления и могут изготавливаться с контроллерами процессов для удалённых установок.
Вполне возможно, сервоприводы будущего будут решать много смежных задач в машинах и механизмах, помогая избежать установки дополнительного оборудования.
220v.guru
Сервопривод: что это такое, принцип работы, виды, для чего используется | Статьи
Сервопривод: что это такое, принцип работы, виды, для чего используется
Сервопривод – механизм, имеющий в своем устройстве специальный датчик, по которому отслеживаются определенные значения, блок управления, двигатель. Задачей устройства является контроль и поддержание параметров во время работы, в зависимости от сигнала, передаваемого в отдельный момент времени.
Принцип действия
Работа устройства происходит по принципу обратного взаимодействия с системными сигналами. Сервопривод в определенный момент времени получает входящие параметры регулирующего значения и поддерживает его на выходе производимого элемента.

Конструкция устройства
Механизм подобного типа обычно имеет следующие составляющие:
- Привод — электрический мотор с редуктором или похожие устройства. Необходим для уменьшения скорости движения, если она слишком большая.
- Датчик обратной связи или потенциометр, меняющий угол поворота вала.
- Блок, отвечающий за управление и питание.
- Вход или конвертер.
В принципе работы самого простого варианта лежит схема обрабатывания значений, исходящих от датчика обратной связи и настраиваемых входящих сигналов для подачи напряжения необходимой полярности на двигатель. Сложные устройства, работающие с использованием микросхем, учитывают инерцию, обеспечивая ровный период разгона или торможения, что помогает уменьшить уровень нагрузок и добиться точной синхронизации показателей.
Разновидности
Различают два вида сервоприводов:
- Синхронные – задают темп скорости вращения двигателя и другие параметры, быстрее достигая указанной скорости вращения.
- Асинхронные – способны сохранять работу двигателя даже при низких оборотах.
Также устройства разделяют на электромеханические и электрогидромеханические по особенностям конструкции и принципу работы.
Основные характеристики
Механизмы имеют ряд параметров, характеризующих их работу:
- Усиление на валу оказывает прямое влияние на крутящий момент. Это значение является одной из ключевых характеристик, в паспорте устройства может указываться несколько параметров для различных величин напряжения.
- Скорость поворота также имеет важное значение в работе механизма. Обычно указывается в параметре времени – необходимо, чтобы выходной вал изменил свое направление на 60 градусов.
- Указывается тип устройств — цифровой или аналоговый. Цифровые управляются при помощи кодовых команд, которые последовательно передаются через интерфейс. Аналоговые управляются через подачу разных частот, параметры которых задаются определенным образом.
- Питание может быть различным, но у большинства таких агрегатов оно находится в диапазоне 4,8-7,2 вольта.
- Угол поворота. Обычно это значение в 180 или 360 градусов.
- Сервопривод может быть переменного или постоянного вращения.
Имеет значение материал изготовления. Детали могут быть металлическими, пластиковыми, либо в комбинированном составе.
Преимущества и недостатки
У сервопривода есть определенные преимущества, которые делают его предпочтительным вариантом для некоторых видов работ:
- Электрический сервопривод универсален, не требуют особых условий к двигателю или редуктору. Могут использоваться любого вида и уровня мощности.
- При использовании гарантируется абсолютная точность, одновременно устраняются механические люфты или сбои в электронике, предотвращается износ, тепловое расширение, мгновенно выявляется отказ привода.
- Повышенная скорость передвижения элементов, в сравнении с другими видами двигателей.
- Работают бесшумно.
- Успешно работают даже на малых скоростях.
Существуют также определенные недостатки, свойственные механизмам этого типа:
- Работа требует использования дополнительного элемента — датчика.
- Сама система и принцип ее работы имеет более сложную схему, чем, например, шаговый двигатель.
- Присутствует трудность в фиксировании.
- Высокая стоимость.
Область применения
В данный момент сервоприводы получили достаточно широкое распространение. Их можно встретить в точных приборах, автоматах, производящих различные платы, программируемых станках, промышленных роботах и других механизмах. Большую популярность приводы такого типа приобрели в авиамодельной сфере за счет эффективного расхода энергии и равномерного движения.
Сервоприводы меняются и развиваются. В самом начале появления они обладали коллекторными моторами с обмотками на роторе. Постепенно число обмоток выросло, также увеличилась и скорость вращения и разгона. Позже обмотки начали располагаться снаружи магнита, что также способствовало повышению эффективности работы. Дальнейшие усовершенствования позволили отказаться от коллектора, стали использоваться постоянные магниты ротора. Наиболее популярны сейчас сервоприводы, которые работают от программируемого контроллера. Это дает возможность создавать приборы высокой точности и современную технику.
Возможность достижения высокой точности часто становится решающим фактором для применения сервопривода. Кроме того, благодаря новым цифровым разработкам, позволяющим предусмотреть различные способы связи с объектами, система использует компьютер для управления и настройки, что значительно упрощает работу.
В различных сферах также используются серводвигатели. Они могут перемещать выходной вал в заданное положение и удерживать его автоматически. Также помогут придать движение какому-либо механизму, координируемому вращениями вала. Для мотора важными параметрами являются равномерность и тональность движения, эффективность затрачиваемой энергии.
Управление серводвигателем
К устройству по присоединенному к нему проводу подается управляющий сигнал, представляющий собой импульсы постоянной частоты и переменной ширины. При подаче сигнала в проводимую схему генератор производит свой импульс, размер которого устанавливается с помощью потенциометра. Другая часть схемы проводит анализ всех поступаемых сигналов, и если он разный, то происходит включение сервопривода. Если размеры импульсов равнозначные, электромотор отключается.
Серводвигатели отличаются своим разнообразием по конструкции и принципу действия. Модели бывают со щетками и без щеток. Первая категория представлена двигателями постоянного тока. Устройства, имеющие щетки, более разнообразны – к ним относятся шаговые двигатели и работающие от переменного тока. Последняя группа делится еще на два вида — синхронные и асинхронные. Синхронные двигатели, в зависимости от особенностей работы, могут быть вращающимися или линейными.
В работе моторов также используется сервоусилитель – это элемент конструкции, который обеспечивает подачу питания и управление двигателем с постоянными магнитами. Может работать при необходимости и в автономном режиме, при помощи специальной программы, которая предварительно загружается в память устройства.
Агрегаты, гарантирующие высокую точность работы, являются весьма востребованными. Подобные двигатели широко применяются в различных сферах промышленности, всевозможных станках и оборудовании, автомобилестроении.
Энкодер: что это такое, принцип работы, виды, для чего используется
Развитие инженерной промышленности, роботехники и современных технологий привело к появлению новых механизмов, которые используются в различных сложных устройствах. Одним из них стал энкодер — прибор, при помощи которого выводятся показатели вращающихся деталей электродвигателя или редуктора. Это же устройство часто называют датчиком угла поворота, поскольку оно позволяет определить текущее направление вращения и положение по отношению к оси. Потребность в использовании энкодеров возникла с усовершенствованием сервомоторов, но позже их стали использовать и в других конструкциях.

Особенности работы и разновидности
Датчики обычного вида имеют ручку, вращающуюся по часовой стрелке и против нее. На приборе отображается цифровой сигнал о том, в каком направлении повернута ручка или где она находится. В зависимости от используемого типа преобразования сигнала, приборы разделяют на абсолютные и инкрементальные.
Устройства абсолютного типа
Круг поворота, имеющийся в абсолютном энкодере, поделен на равнозначные, пронумерованные сектора. При работе устройство показывает номер определенного сектора, в котором он находится. Его называют абсолютным потому, что по нему можно точно определить положение угла относительно начального сектора до крайнего значения. При движении он будет последовательно выдавать номера, а затем снова вернется к нулевому значению. Если во время использования вращение будет направлено в обратную сторону, то и код будет выдаваться в обратном порядке, соответственно, при необходимости можно узнать направление.
В зависимости от вида энкодера, за единицу измерения принимают один или несколько оборотов диска. С учетом этой разницы, выделяют однооборотные и многооборотные механизмы, считающие коды за один цикл вращения или за несколько. Абсолютные энкодеры решают больший объем задач, нежели инкрементальные, за счет использования цифровых кодов, а не импульсов.
Инкрементальные механизмы
Схема устройства таких энкодеров проще по сравнению с абсолютными. Они отображают только направление положения ручки. Угол при этом должен считать микроконтроллер. Энкодер имеет набор усиков или полосок, которые соприкасаются и расходятся при повороте, образуя особый рисунок.

Эти устройства определяют количество импульсов от точки отсчета на одну единицу оборота. При окончании вращения показатели будут равняться единице. При начале поворота в любую сторону выводы последовательно контактируют с землей, формируя ноль, после они отсоединяются от поверхности и снова отражается единица. Цикл некоторое количество раз повторяется и создает последовательность из нулей и единиц. Направление поворота в текущий момент определяется по тому выводу, который первым контактировал с поверхностью.
Классификация по принципу действия
Энкодеры также можно разделить на несколько групп по физическому принципу действия, характерному для каждой из них:
- Имеет форму диска, закрепленного на валу, произведенного из стекла. Он запоминает углы вращения, при этом каждому положению отображается его цифровой код. Такие технологии позволяют реализовать классические решения для энкодера и передавать сигнал в аналоговой или цифровой форме. Они достаточно надежны, но при этом остаются доступными по стоимости.
- Магнитные энкодеры имеют в своем устройстве специальный датчик, который фиксирует рабочий цикл вращающегося магнита. Показания такого устройства формируются в цифровой код. Во время попадания проводника в область магнитного поля происходит резонанс, что и позволяет устройству работать. Датчик сканирует изменения поля. Угол, который может принимать элемент, соответствует определенному вектору.
- Магниторезистивные датчики работают, постоянно определяя показатели тока, проходящего через катушку, установленную внутри. В зависимости от показаний, определяется угол поворота. Конструкция этого устройства состоит из вращающейся катушки, помещенной в магнитное поле.

Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
- Величина импульсов, которая производится в момент одного оборота диска в процессе работы. Может варьироваться от 1 до 5 тысяч импульсов.
- Для абсолютных энкодеров важна такая характеристика, как разрядность бит или их количество.
- Тип вала, используемого в устройстве, может отличаться — он бывает с прямой осью или полый.
- Учитывается разновидность используемого фланца на валу под шпонку.
- Сигнал при выходе может отличаться.
- Уровень напряжения питания.
- Используемый тип разъема и длина кабеля.
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения. Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.
Использование
Существует немало сфер и областей, в которых энкодеры нашли широкое применение. Достаточно рассмотреть наглядные примеры использования этих устройств, чтобы убедиться в их популярности:
- В механизмах, работающих для нужд печатной промышленности, эти датчики контролируют вращение валов, по которым проходит бумага и краска.
- На предприятиях, где ведется металлообработка, они задействованы при вращении валов с металлическими лентами.
- При конструировании различных моделей и устройств в области робототехники помогают контролировать движение различных частей робота.
- В автомобилестроении с помощью датчиков определяется угол поворота колеса.
- Городское хозяйство нельзя представить без лифтов – для их работы также требуются энкодеры.
- В пищевой и химической промышленности необходимо постоянно фасовать продукцию в больших объемах. Этим занимаются автоматизированные устройства, в которых установлены энкодеры.
- Даже в домашних условиях можно легко найти предмет, в котором есть энкодер — это компьютерная мышь, которая есть практически в каждой квартире.
- В различных электротехнических устройствах, например, сервомоторах, требующих высокой точности, также установлены датчики.
В зависимости от сферы использования и особенностей устройства, энкодеры могут решать различные задачи. Они измеряют угловые положения, помогают определить позиционирование объектов, детектируют положение в пространстве, могут проводить определение позиций с высокой точностью, а также измерять вращательные движения.
www.techtrends.ru
Устройство сервомотора
Сервомоторы (серводвигатели) представляют собой специализированные электродвигатели, оснащенные так называемой отрицательной обратной связью, с помощью которой осуществляется точное управление всеми параметрами движения. Ее суть состоит в том, что в процессе работы этих устройств происходит постоянное сравнение выходных параметров функционирования с изначально заданными входными. Происходит это на основе управляющих сигналов, генерируемых в режиме реального времени сервоконтроллерами, имеющими в своей конструкции энкодеры, то есть датчики обратной связи.
Таким образом, в конструкцию всех современных сервомоторов входит собственно электродвигатель и управляющий блок. В совокупности они представляют собой сервоприводы, с помощью которых конструкторам технических устройств удается решать целый ряд важных задач. Наиболее часто серводвигатели (сервоприводы) применяются в тех случаях, когда требуется в автоматическом режиме осуществлять точное позиционирование одних рабочих элементов конструкции разнообразного оборудования (например, станков с числовым программным управлением, прессо-штамповочного оборудования, роботизированных сборочных конвейеров и т. п.) относительно других.

Все выпускаемые ведущими мировыми производителями серводвигатели можно разделить на две большие группы: со щетками и без щеток. В сервоприводах могут использоваться как синхронные, так и асинхронные электродвигатели, а также синхронные линейные двигатели. Кроме того, в сервоприводах могут использоваться как корпусные, так и бескорпусные электродвигатели, причем во втором варианте исполнения роль корпуса играет пакет пластин статора, что позволяет максимально эффективно использовать весь их профиль, и при этом существенно уменьшить размеры и вес устройств в целом.
Большинство современных серводвигателей, работающих по принципу обратной связи, управляется сигналами, сформированными энкодером из нескольких системных. Одной из основных особенностей сервосистем является то, что они способны усиливать выходные сигналы, которые изначально, как правило, имеют гораздо меньшую мощность, чем входные (это необходимо для того, чтобы их можно было сравнить). Таким образом, при работе сервосистем их контуры в прямом направлении передают энергию, а в обратном – информацию, требуемую для точного управления.
Основными техническими характеристиками сервомоторов являются их динамика, равномерность движения и энергоэффективность. В последние годы все более широкое применение находят синхронные серводвигатели, которые выгодно отличаются от асинхронных более высокой динамикой, возможностью длительной работы на низких скоростях без принудительного охлаждения и более высокой устойчивостью к перегрузкам. В то же самое время асинхронные двигатели, используемые в сервоприводах, имеют перед синхронными двигателями такое преимущество, как полное отсутствие пульсации при вращении.
Сервомоторы, выпускаемые ведущими мировыми производителями, удачно сочетают в себе компактность и высокую мощность. Кроме того, они отличаются большой надежностью, отказоустойчивостью, легкостью и простотой в обслуживании.
selectelement.ru