ПРОМЫШЛЕННЫЕ РОБОТЫ. Фото подборка — Автоматизация и проектирование

Роботи являются в наше время уже самой неотъемлемой частью жизни. Работа роботов проходит в закрытых помещениях и мы не имеем возможности свободно просматривать их работу. Мало кто задумывался что его мобильный телефон сделан роботом, мало кто знает что стол за которым он сидит собирал тоже робот. Не кто не замечает что вывески на улицах обрабатывали и изготавливали роботи.
Мы видим только то что светится.
Рассмотрим обычный поход по обычной улице. Видим вывеску. Вывеска светится. Форма вывески вырезалась из определенных материалов роботов, вывеска соединялась другим роботом. Лампочки которые светятся внутри изготавливал робот с соседнего предприятия. Машины тоже делают роботы. Но без человеческих усилий нам бы не было так в них комфортно.
Смотрим подробнее..
Если вы искали РАБОТУ , Вам сюда => Заработок Постоянно Честно и Автоматически!






















 Другие статьи по разделу:
Другие статьи по разделу:Детский робот ReCon
Робот ROMO на базе смартфона
Автономный дрон «Бумеранг» для таможни
Роботы на Чернобыльской АЭС. Секретная информация о технике чернобыля
1injener.ru
Роботы в промышленности — их типы и разновидности / Top 3D Shop corporate blog / Habr

Что это?
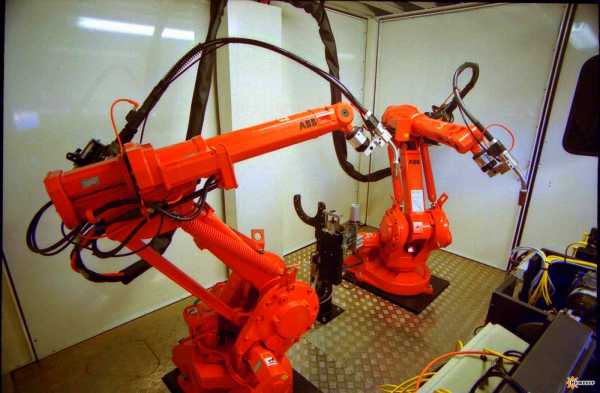
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно — чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов — эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.

Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают — роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы. Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно — зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять — что же они умеют? Нет конечно. Поехали.
Рассмотрим образцы
Среди промышленных роботов выделяется продукция таких известных фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
KUKA KR QUANTEC PA Arctic

KUKA KR QUANTEC PA — один из лучших роботов-палетоукладчиков на рынке. KUKA KR QUANTEC PA Arctic — его модификация, робот функционирующий при экстремально низких температурах. Он создан для работы преимущественно в морозильных камерах, при температурах до -30 °C. Электронные и механические части аппарата не нуждаются в защите от мороза, снега, инея, а также не выделяют излишнего тепла. Радиус действия манипулятора модификации Арктик, как и у стандартного KUKA KR QUANTEC PA, составляет 3195 мм, а полезная нагрузка — до 240 кг. Аппарат идеален для применения в пищевой промышленности и в условиях крайнего севера. Кроме составления штабелей из паллетов, робот может выполнять и другие манипуляции, ведь точность его движений, а точнее говоря — стабильность повторяемости позиционирования, составляет 0,06 мм.
FANUC M-2000iA/1200

FANUC M-2000iA/1200 — пятиосевой грузоподъемный робот поднимающий до 1200 кг и перемещающий этот груз на расстояние до 3,7 м — идеален в качестве погрузчика, так как работает без участия человека, что практически сводит к нулю опасность травматизма. Работает при температурах 0°C — +45 °C. Стабильность повторяемости — 0,03 мм.
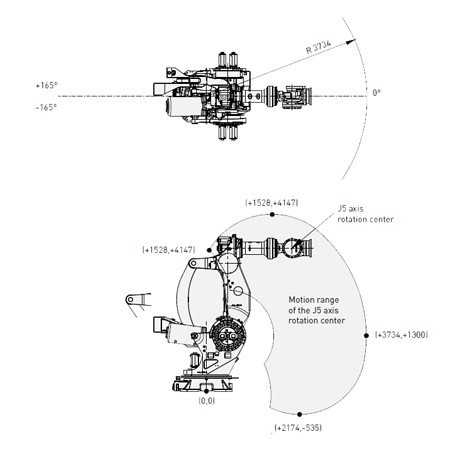
Крайне прочный аппарат.
Universal Robots — UR10
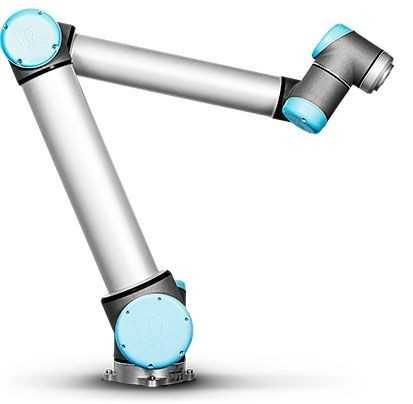
UR10 — самый крупный из манипуляторов Universal Robots и это коллаборативный робот, проще говоря — он создан для работы с другим оборудованием и помощи в работе человеку.

Манипулятор модели UR10 имеет радиус действия 1,3 м и поднимает груз до 10 кг. Его можно использовать с сельскохозяйственным, фармацевтическим, технологическим и многим другим оборудованием. Компактно размещается на рабочем месте человека, чтобы стать ему “третьей рукой”, легко программируется и быстро настраивается.
UR10 умеет завинчивать, клеить, сваривать и паять, производить литьевые и сборочные работы.
Также роботы Universal Robots применены в проекте Voodoo Manufacturing: Project Skywalker компании Medium Corporation — это фабрика 3D-печати, многие операции на которой выполняют именно роботы-манипуляторы. Такие действия, как замена платформ для печати, сбор и складирование готовых изделий больше не требуют неустанного внимания персонала.
Особенно интересны универсальные роботы, так как именно они, в силу своего назначения, снабжены наиболее адаптивными системами управления.
Rethinkrobotics
Это такие роботы, как Baxter и Sawyer производства Rethinkrobotics.
Baxter — многофункциональный робот с двумя манипуляторами и системами обратной связи и самообучения.

Его 7-осевые манипуляторы способны почти на всё, на что способна рука человека, в том числе — имеют обратную связь и могут контролировать прилагаемые усилия. Это, плюс ещё особенности дизайна, делают Бакстера безопасным для живых рабочих — его рабочее место не нуждается в ограждении, да и вообще — места он занимает немного, что здорово экономит пространство в цеху. Пара бакстеров способна успешно работать вместе.

Бакстер интересен еще и тем, что не требует тщательного подробного программирования каждого своего действия — “учить” его можно не только через интуитивно понятное визуальное приложение, но и прямо на рабочем месте — повторяя показанные движения он запоминает их и применяет в дальнейшем.
Sawyer — “младший брат” Бакстера — удивительно компактный и легкий робот-манипулятор, он весит всего 19 килограмм и может быть установлен почти где угодно, не занимая при этом много места.

Точность действий Сойера доходит до 0,1 мм, что позволяет использовать его в сотнях видов комплектовочных, сборочных и других конвейерных работ.
Оба робота легко переобучаются для выполнения новых функций даже без применения традиционного программирования и столь же просто перемещаются с одного рабочего места на другое.
Гибридное производство
Stratasys Infinite-Build 3D Demonstrator
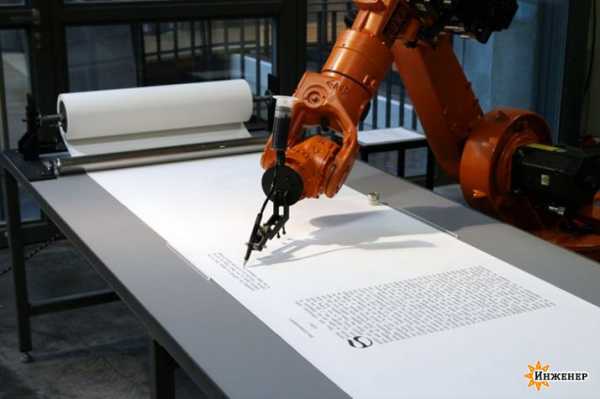
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа — гибрид робота и 3D-принтера.

Конечно, любой 3D-принтер обладает признаками робота, но тут — это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” — “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.

Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления — все говорит нам о том, что у этого аппарата и его потомков большое будущее.
3D Systems — Figure 4

Figure 4 компании 3D Systems — модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.

Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут — в отличие от нескольких часов на обычных SLS-принтерах.

Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.
Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.

Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus — полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.


Принтер также роботизирован — снабжен системой автоматической загрузки, удаления и переработки печатного порошка.
Можно с уверенностью сказать, что комплексный подход к 3D-печати — часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
Carbon — Carbon SpeedCell

Carbon SpeedCell — технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.

CLIP — технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.
Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует — это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI — LASERTEC 65 3D

Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением — пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка — все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.
Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS — Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности — этот манипулятор создан по примеру хобота слона.
Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например — из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:
https://youtu.be/vQ_Zh0bxhs8
Также компания спонсирует и представляет проект Roboy — это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.

Concept Laser и Swisslog — M Line Factory

Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект — M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.
https://youtu.be/0v4LAbjfJxc
Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл — от загрузки проекта в память, до выхода готового изделия на склад, — без необходимости вмешательства оператора.
Additive Industries — The MetalFAB1

Единственная в своем роде установка — единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически — готовый цех металлической 3D-печати в одном корпусе.
Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.
А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.
Например, вот так это делает упомянутый выше Sawyer:
https://youtu.be/XU6thj7cQ5c
Выводы
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих — они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде — многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, — но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
habr.com
Современные роботы (33 фото + текст)
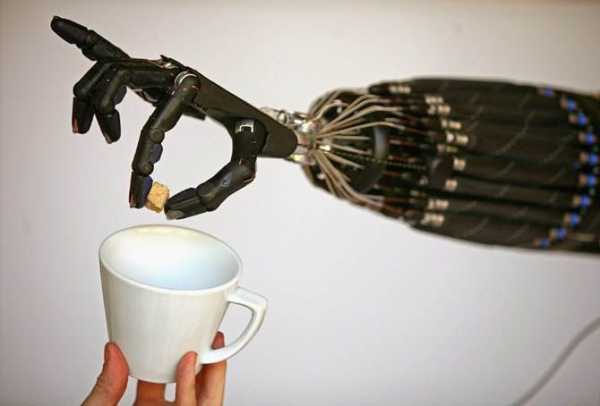
Рич Уокер демонстрирует роботизированную руку, созданную, чтобы помогать военным, в центре оборонного предприятия в Оксфорде 11 февраля.

Стоматолог демонстрирует использование нового гуманоида по имени Ханако, разработанного инженерами местных университетов Токио. Робот поможет будущим стоматологам на практике. У Ханако есть зубы из твердого пластика, а также реалистичная полость рта, которая может кровоточить и имеет слюноотделение, как у обычного человека. Робот также распознает голоса и речь, так что студенты смогут не только улучшить свои профессиональные способности, но и научиться общаться с пациентами.

Андроид из Южной Кореи по имени “EveR-3″ в традиционном костюме во время выступления в мюзикле в Сеуле 18 февраля. Разработанный в Южной Корее робот, заявленный в пьесе «Принцесса-робот и семь гномов», уже назначен на другие роли в этом году.

Подозреваемый Уоррен Тэйлор лежит на земле, сдавшись роботу у почтового отделения в Витевилле 23 декабря 2009 года. Тэйлор обвиняется в захвате заложников.

Робот-гуманоид без «лица» представлен на крупнейшей выставке роботов в Токио 28 ноября 2009 года. Этот робот в натуральную величину призван помочь студентам-стоматологам. Зовут его «Симроид» (сокращенно от «симулятор» и «гуманоид»). Робот имеет реалистичную кожу, глаза и рот, в который можно поместить копии настоящих зубов, чтобы студенты могли их сверлить. Робот, кстати, умеет плакать, если вдруг лечение пошло не так.

Четвероногий робот по имени БигДог создан, чтобы помогать солдатам носить тяжелое снаряжение в поле.

Робот по имени Робови- II, разработанный японским институтом исследования роботов «ATR», ездит в супермаркете во время «шопингового» эксперимента в Киото 6 января. Робот приветствует покупателя у входа в магазин, а затем следует за ним с корзиной, напоминая о продуктах, которые нужно купить. Эти продукты покупатель заблаговременно вносит списком в специальное устройство в роботе.

Выпускник Массачусетского института технологий Кентон Уильямс проверяет лицо робота по имени Некси 5 марта.

Робот компании «The Shadow Robot» с захватным устройством в руке выполняет задание на мероприятии «Streetwise Robots» в музее науки 6 мая 2008 года в Лондоне. У этого робота есть 40 мышц, которые позволяют ему делать до 24 движений.
На этих фотографиях можно увидеть «кибернетического человека» HRP-4C, который выглядит как обычная японская девушка. Робот выражает различные эмоции: гнев (слева) и удивление (справа).

Капитан Джудит Галлахер из подразделения снайперов демонстрирует противовзрывного робота, известного как ‘Dragon Runner’ во время фотосессии, посвященной военным технологиям, в Лондоне 17 марта. Робот весит 10-20 кг и легко умещается в рюкзаке солдата, к тому же, он может работать на грубых поверхностях.

Робот-учитель английского языка стоит перед детьми в начальной школе Тэджона, в 140 км о тСеула, 11 декабря 2009 года. Роботы-учителя, которые никогда не сердятся и не делают саркастичных замечаний, произвели в некоторых школах Южной Кореи настоящий фурор.

Роботы собирают автомобили «Nissan Patrol» на заводе компании «Nissan Shatai Kyushu Co.» в Канда Тауне, префектура Фукуока, Япония, 24 февраля.

Новый робот японской компании «Kawada Industries» по имени Некстейдж перерезает ленточку вместе с другими официальными лицами на церемонии открытия Международной выставки роботов в Токио 25 ноября 2009 года.

Играющие в футбол роботы на крупнейшей ярмарке технических новинок «CeBIT» 2 марта 2010 года в Ганновере. На ярмарке, проходившей с 2 по 6 марта, свои продукты представляли 4157 компаний из 68 стран.

Американский солдат проходит мимо робота, предназначенного для разминирования объектов, которого назвали в честь мультяшного робота Валли, в лагере Лезернек в провинции Гильменд 10 марта.

Студент инженерного факультета успокаивает ребенка-робота во время презентации в лаборатории университета Цукубы 12 февраля. Робот Ётаро смеется и размахивает ножками, если помахать перед ним погремушкой, но может заплакать и закапризничать, если щекотать его слишком часто.

Работник инженерной компании «Festo» дает гантелю роботу 15 апреля 2007 года в Ганновере накануне технологической ярмарки.

«Луноход-2» (яркая точка наверху слева) и осталенные им следы (слабые, в центре) на поверхности Луны 12 марта 2010 года. Снимок сделан с Лунного орбитального зонда. «Луноход-2» высадился на Луну 15 января 1973 года и проработал почти четыре месяца, преодолев расстояние в 37 км.

Рабочий проходит мимо двурукого робота по имени «Мотоман» японской компании «Yaskawa Electric» во время последних приготовлений к промышленной ярмарке в Ганновере 18 апреля 2008 года.

Солдат наблюдает за роботом-сапером в административном здании в провинции Яла, примерно в 1084 км к югу от Бангкока 18 февраля. Житель местного поселка сообщил полиции о подозрительном коробке на улице. В коробке ничего не оказалось.

Актер Бранч Уоршэм танцует с роботом на генеральной репетиции мюзикла «Роботы» в театре «Барнабе» в Сервионе, недалеко от Лозанны, 22 апреля 2009 года. В мюзикле рассказывается история о человеке, ушедшем в добровольное изгнание с тремя роботами (дворецким, домашним питомцем и танцовщицей), к которому приходит женщина, представляющая собой последнюю связь с человеческим миром.

На этом фото, опубликованным 16 февраля израильской компанией, вы видите средневысотный беспилотный летательный аппарат с большой продолжительностью полета «Heron» для стратегических и тактических миссий. С размахом крыльев до 16,6 метров и стартовым весом в 1250 кг этот самолет может набирать высоту до 9144 метров и может летать до 50 часов без остановки. В данный момент ими пользуются силы коалиции в Афганистане, полагаясь на их способности к разведке и добыче информации в реальном времени, которую они могут доставить прямо командирам и солдатам на передовой линии.

Робот-гуманоид, разработанный специально для того, чтобы привлечь интерес студентов к роботам, представлен на всеобщее рассмотрение профессором института технологии Ниппон Юичи Наказато (вверху справа) в Мияширо 19 декабря 2009 года.

Израильский эксперт по взрывчатым веществам управляет роботом после запланированной детонации взрывчатки на пляже Палмачим к югу от Телль-Авива 3 февраля.

Робот Махру-Зед (справа), разработанный корейским институтом науки и технологии, берет тосты в Сеуле 15 января. Южнокорейские ученые разработали ходячего робота, который может убирать дом, бросать вещи в стиральную машину и даже разогревать еду в микроволновке. На разработку этого робота у института ушло два года. Робот 1,3 метра в высоту и весит 55 кг.

Вид кратера Консепсьон, сделанный с марсохода НАСА «Opportunity» в феврале 2010 года. Консепсьон – молодой кратер, являющийся целью автономного исследования марсоходом «Opportunity». Используя систему автономного исследования, ровер проанализировал снимки на предмет обнаружения черт, больше всего подходящих критериям цели – в данном случае, камни, которые были крупнее и темнее. Затем ровер использовал программу для боле детального обследования предмета с помощью панорамной камеры.

«Ребенок-робот с биомиметрическим телом», или (сокращенно) “CB2″ осматривается в лаборатории в Осаке 30 августа 2007 года. Робот сделан «в образе» настоящего ребенка в возрасте от одного до трех лет, чтобы помочь в изучении вопросов, связанных с развитием детей.

Студент отделения «Imformatics PHD» Себастьян Битцер отжимается рядом с запрограммированным гуманоидом Кондо в здании форума «Imformatics» в университете Эдинбурга 3 сентября 2008 года.

Робот Топио играет в пинг-понг на Междуанродной выставке роботов в Токио 25 ноября 2009 года. Этот двухпедальный робот-гуманоид создан для игры в настольный теннис против людей.

Военный самоходный робот «Крашер» едет по пустыне в Нью-Мехико 19 февраля 2008 года. Этот шестиколесный грузовик весом в 6,5 тонн и пулеметом 50-го калибра на крыше не имеет ни водителя, ни мест для солдат. «Крашер» – это управляемый автоматически автомобиль, который никогда не увидит настоящее битвы.

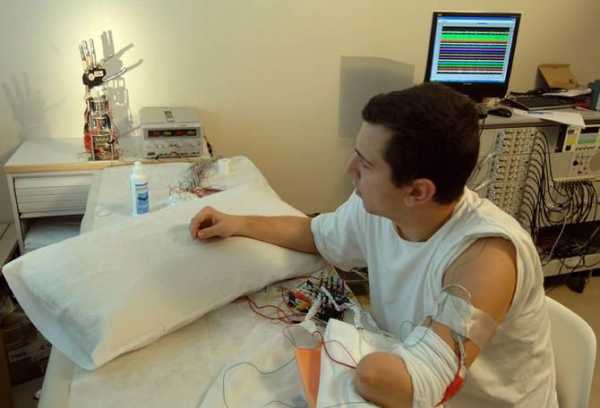
Ампутированная рука Пьерпаоло Петруцциелло соединена электродами с роботизированной рукой во время эксперимента под названием «Рука жизни» в био-медицинском кампусе университета Рима. Эксперимент проводился, чтобы позволить человеку управлять своими протезами мысленно. В декабре 2009 года группа европейских ученых объявила, что они успешно соединили роботизированную руку с рукой человека – Петруцциелло, который потерял руку в автомобильной аварии. Это позволило ему управлять протезом силой мысли и чувствовать различные импульсы в искусственной руке. Эксперимент длился месяц. Ученые говорят, что это был первый раз, когда человек с ампутированной конечностью мог делать сложные движения, используя мысли для управления биомеханической рукой, присоединенной к его нервной системе.
Рука робота для нового марсохода НАСА согнута почти на 90 градусов. Роботизированная рука проходит испытание в лаборатории по разработке реактивного двигателя в Пасадене, Калифорния. Марсоход получил название «Curiosity» (с англ. «любознательность») и должен быть запущен в октябре 2011 года. Рука со специальными инструментами будет двигаться, чтобы собрать образцы марсианских камней и почвы. Эта рука идентична той, что будет установлена на марсоход «Curiosity».

zagony.ru
Первые промышленные роботы: как рождалась индустрия
С технической точки зрения промышленные роботы возникли из двух видов устройств: гидравлических машин и станков с ЧПУ. Гидравлические прессы еще в XIX веке получили широкое распространение на фабриках. Первые станки с ЧПУ появились значительно позже – в 50-х гг. До создания первого промышленного робота оставалась пара лет.
Рождение первого промышленного робота
Коктейльная вечеринка в Коннектикуте, 1956 год. Одним из гостей был Джордж Девол. Двумя годами ранее он подал заявку в патентное бюро на устройство под названием «Программируемое изделие для перемещений» (Programmed Transfer Article). Он, однако, не знал, как именно можно применять его изобретение. Среди гостей был также Джозеф Энгельбергер, аэрокосмический инженер, увлеченный научной фантастикой и книгами Айзека Азимова. Результатом встречи стало создание компании Unimation в 1958 году, разработка робота Unimate и рождение индустрии промышленных роботов. Инноватор Девол и предприниматель Энгельбергер очень хорошо друг друга дополняли.
Unimate весил порядка двух тонн и приводился в движение гидравлическими приводами. Управлялся он программой, записанной на магнитном барабане.
Для начала Девол и Энгельбергер посетили 15 автомобильных фабрик и еще порядка 20 других производств, чтобы лучше понять потребности в индустриальных роботах. В 1961-м они создали прототип устройства. Первого робота установили на фабрике General Motors (GM) в Трентоне. Он обслуживал машину для литья под давлением. Это был довольно простой робот в сравнении с современными образцами. Он мог выполнять только одну задачу: перемещение материала. Робот был продан за $18 000, хотя его производство обошлось Unimation в $65 000. Изобретатели надеялись на хорошие отзывы GM, «сарафанное радио» и получение обратной связи о том, что можно улучшить.

Робот Unimate

Первый робот Unimate проходит финальные тесты перед отправкой на фабрику General Motors. Джозеф Энгельбергер (слева) с инженерами Unimation. 1961 год
На рынке появляется конкуренция
Технический директор Ford Дэл Хардер был очень влиятельным человеком в том, что касалось технического развития. Когда он сказал, что Ford хочет установить 2000 роботов Unimate на своих фабриках, это был очень важный шаг. Но переплачивать он не собирался, поэтому скопировал спецификацию робота Unimate и разослал ее для производства в другие компании. Из-за этого шага большое количество американских компаний зашли на рынок робототехники, и они также увидели большой потенциал в применении промышленных роботов.
Своеобразным прорывом стала установка 66 роботов на фабрике GM в Огайо. Потребность в промышленных роботах все еще была низкой, но теперь Unimation была уверена, что у промышленной робототехники есть будущее. Им просто нужно было подождать, пока на рынке сформируется потребность в их продукции. А пока производители не очень интересовались роботами, СМИ окружили их вниманием. Энгельбергер и его роботы были постоянными гостями на телевидении, где машины подавали кофе во время телепередач и пиво в рекламных роликах. Благодаря этому широкая публика начала воспринимать эти устройства как забавные игрушки, а не как нечто пугающее. В Европе первые промышленные роботы появились в 1967 году, на металлообрабатывающем заводе в городе Уппландс Весбю в Швеции.
В 1969 году Unimation установила своих первых роботов для точечной сварки. 26 таких устройств появилось на фабрике GM. В Европу сварочные роботы пришли в 1972-м – они были установлены на сборочной линии Fiat.
Электронный робот Unimate за работой. Коннектикут, США. 1967 год
Построение индустрии промышленных роботов и первая прибыль
Хотя первое коммерческое использование промышленных роботов относится к началу 60-х, индустрия роботостроения сформировалась только к середине 70-х. К этому времени появились новые микроэлектронные компоненты, в том числе микропроцессоры. Они сделали возможным появление мощных и доступных по цене систем контроля. У потенциальных покупателей также было время, чтобы оценить новую технологию и ее преимущества. С середины 70-х продажи промышленных роботов резко возросли: среднегодовой рост превысил 30%.
Однако первой областью, где созданный робот был немедленно применен в работе, стало нанесение краски. Норвежской компании Trallfa, производящей тачки, было необходимо гибкое устройство для распыления краски, поскольку из-за тяжелых условий труда компания не могла найти персонал на эту операцию. Установка робота Unimate стоила бы компании 600 000 норвежских крон. Trallfa решила разработать собственного робота, который бы обошелся не дороже 15 000 крон. После нескольких лет работы, в 1967-м, компания представила электрогидравлического робота, который мог совершать непрерывные движения и которого было очень просто программировать. Робот задумывался как устройство для внутреннего использования, но неожиданно получил большой коммерческий успех. В 1985-м Trallfa вошла в состав ASEA (позднее ABB). Это только один из примеров того, как большие компании в 60-х и 70-х создавали собственных промышленных роботов.
В 1973 году по миру было установлено 3000 роботов, и 30% из них были роботами Unimate. В то же время производством промышленных роботов занималась еще 71 компания. Однако показатели продаж в начале росли очень медленно. Так, Unimation не видела положительных результатов вплоть до 1975-го, спустя 14 лет после создания первого робота.

Робот-распылитель Trallfa
Новые сферы для роботов и усложнение сенсоров
Первые промышленные роботы были пневматическими и гидравлическими. В 1968-м появился электрический робот Vicarm. Исследования GM об использовании роботов на сборочных линиях показали, что 95% деталей пассажирских автомобилей весят от 1,5 до 2,5 кг. Пневматические и гидравлические роботы были разработаны для гораздо больших нагрузок и не подходили для сборки. Зато в эту нишу идеально вписались быстрые, хотя и не такие сильные электрические роботы.
Обработка материалов, главная сфера применения роботов в 70-х, требовала от устройств высокой грузоподъемности. Для выполнения операций по дуговой сварке нужны были более качественные моторы и системы контроля траектории. В конце 70-х – начале 80-х наиболее активно разрабатывались роботы для сборочных линий. Требовались устройства с большей частотой повторений и скоростью.
Автомобильная индустрия была и остается важным покупателем роботов – как и металлообработка, где условия труда (большие нагрузки и высокая температура) неблагоприятны для человека. В 80-х относительно простые задачи, вроде передачи материала, покраски и сварки, было экономически выгодно автоматизировать.
В первой половине 80-х промышленные роботы были на пике интереса. Владельцы производств, исследователи и политики определяли робототехнику как ключевую область для индустриального развития и получения конкурентных преимуществ.

Робот Vicarm
С конца 80-х до сегодняшних дней развитие роботов идет по пути усложнения используемых сенсоров. Роботам необходимы машинное зрение, лазерные сканеры и датчики силы, чтобы обнаруживать и отслеживать части объекта. Сенсоры должны быть интегрированы с системой контроля, поскольку сенсор и робот должны работать вместе. Сегодня некоторые исследования сосредоточены на создании более открытых интерфейсов для систем контроля. Они должны работать с широким набором сенсоров, которые можно интегрировать с системами робота. А для совместной работы с человеком сегодня часто предпочитают использовать коботов.
О ключевых производителях промышленных роботов мы уже писали ранее. Рынок индустриальной робототехники во многом формируют 10 мировых компаний.
Россия пока сильно отстает по темпам роботизации, но свои разработчики промышленных роботов есть и здесь. Статистику и описание основных производителей смотрите в этом материале.
robo-hunter.com
Промышленные роботы манипуляторы, применение в производстве
Система промышленных роботов
Что вы должны знать о промышленных роботах и о их системах? Зависит от того, почему вы ищете эту информацию. В этой статье мы постараемся рассмотреть наиболее распространенные вопросы, касающиеся роботов, используемых в промышленной среде.

Не каждое механическое устройство, используемое в промышленной среде, можно рассматривать как робот. Как определено ISO (Международной организацией по стандартизации), промышленный робот является автоматически управляемым, перепрограммируемым многоцелевым манипулятором, программируемым тремя или более осями.
Это в значительной степени принятое определение, которое используется при разговоре о промышленных роботах. Однако, будучи немного философом, я хотел бы добавить к нему несколько мыслей. Как вы можете прочитать на домашней странице этого сайта, вопрос о том, что можно считать роботом, а что нет, не так просто. Промышленная робототехника до недавнего времени сумела избежать этой путаницы.
Такие люди, как гениальные инженеры и предприниматели, находят все больше и больше способов, как робототехника может помочь оптимизировать рабочий процесс в промышленной среде. Благодаря достижениям в области технологий аккумуляторов и беспроводных сетей давно установленное роботизированное орудие должно прокладывать путь к новичкам, таким как swarm AGVs (Automated Guided Vehicles), используемые в складировании.
Системы управления промышленными роботами

Типичный промышленный робот состоит из инструмента, промышленного роботизированного кронштейна, шкафа управления, панели управления, учебного кулона, а также другого периферийного оборудования.
Инструмент (также называемый конечным эффектором) — это устройство, предназначенное для конкретной задачи, например: сварка или покраска. В основном это робот, который перемещает инструмент. Осторожно! Важно понимать, что не каждый промышленный робот похож на руку. Существуют различные типы различных структур роботов.
Шкаф управления напоминает мозг робота. Панель управления и учебный кулон составляют пользовательскую среду. Эти части обычно объединяются.
Панель управления предназначена для использования оператором для выполнения некоторых обычных задач. Например, изменение программ или управление периферийными устройствами. В то время как учебный кулон обычно используется только во время программирования, хотя его можно подключить к шкафу управления, если для выполнения программы требуется дополнительная память.
Применение промышленных роботов
В идеале применение промышленных роботов должно быть беспроигрышной ситуацией. Вы знаете, что есть задания, которые никто не хочет делать. Это те повторяющиеся, утомительные работы, которые требуют много монотонного действия со стороны рабочего, например, что-то собирать с одного конвейера на другой.
Если это всегда одна и та же задача, вы можете использовать автоматическое решение, специально разработанное для ваших нужд. Что, если это не так? Ситуация, когда фабрика должна быть все более гибкой, становится все более распространенной. В этих случаях правильным решением может быть перепрограммируемый робот, который может использоваться для различных задач.
Кроме того, вы должны рассмотреть «робота-работника» для тех задач, которые опасны для человека-работника. Например, обработка поверхности опасными химикатами и работа в опасной окружающей среде. Во многих случаях, как и упомянутые, в долгосрочной перспективе разумнее и дешевле использовать робота, чем нанимать рабочего.
И конечно же, есть работы, которые очень необходимы людям. Как снятие очень тяжелых весов или работа в условиях, непригодных для жизни человека. Опять же, во многих из этих случаев могут применяться специальные автоматизированные решения. Однако, если требуется гибкость, следует учитывать робота.
Вот список наиболее часто встречающихся приложений для роботов:
- Дуговая сварка,
- сборочный,
- покрытие,
- Deburring,
- Литье под давлением,
- молдинг,
- Обработка материалов,
- собирание,
- Паллетирование,
- упаковка,
- Точечная сварка,
- Транспорт,
- складирование.
Структура промышленных роботов и манипуляторов
Существуют различные способы создания робота. В некоторых случаях это вообще не напоминает руку. В этой статье я расскажу только о наиболее распространенных типах структур роботов, которые используются в промышленной робототехнике.
Итак, есть:
- картезианский,
- цилиндрический,
- сферический,
- SCARA,
- Шарнирное плечо,
- Параллельная конструкция.
Почему это важно? Как вы уже знаете (или догадались), каждый из этих типов конструкций имеет свои сильные и слабые стороны. Некоторые более точны, некоторые могут поднять тяжелый вес, а некоторые — дешевле.
Как выбрать поставщика промышленных роботов?

Именно, вы должны оценить, какая задача будет поручена роботу. Сначала это может показаться глупым. Вы наверное, уже знаете, что вам нужен робот для дуговой сварки, например. Однако вы можете подумать более глубоко.
Может быть, есть возможность расширения? Если да, возможно, позже могут быть другие или несколько разные задачи, которые могут быть назначены одному и тому же роботу? Может быть, одна и та же промышленная роботизированная рука может использоваться с разными инструментами в разное время?
Вы должны учитывать такие возможности, поскольку это может сэкономить вам (или вашему работодателю) много денег.
Техническая поддержка. Рядом находится дилер? Вероятно, вам нужно будет проинструктировать сотрудников, получить обновления программного обеспечения, гарантийное обслуживание и т.д. Дилер должен располагаться как можно ближе к вам. Чем дальше находится ваш дилер робота, тем дольше будет ваше время простоя, если потребуется техническое обслуживание, и чем выше будут затраты на обучение персонала.
Конечно, могут быть исключения. Возможно, у вас есть конкретная задача, и единственные, которые могли бы предоставить необходимый робот, далеки. В противном случае вы должны действительно выбрать ближайшего к вам интегратора роботов.
Ваш завод. Вы действительно не должны забывать проверить, имеются ли все необходимые средства для работы конкретного робота на вашем заводе. Куда вы поместите его? Все ли необходимые подключения доступны на будущем сайте робота? Они могут включать в себя электричество, IO, Ethernet, Serial и т.д.
То же самое, что я упомянул в части задачи, также следует учитывать при рассмотрении технической поддержки и вашей фабрики — попытайтесь оценить будущие возможности.
Производители промышленных роботов в России и в Мире
Вот список самых известных производителей промышленных роботов относятся:
- ABB,
- Технология Adept,
- Asyst Technologies,
- Автоматизация Брукс,
- DENSO робототехника,
- Роботы Epson,
- FANUC робототехника,
- Intelitek,
- Тяжелая промышленность Кавасаки,
- Робототехника KUKA,
- Yaskawa-Motoman,
- Роботизированные системы Nachi,
- Reis робототехника,
- Toshiba Machine,
- Штойбли.
robroy.ru
Промышленная концепция роботов и роботизированные технологии Фото
Категории
Векторы Фотографии Psd Иконки
Лицензия
Бесплатно
Premium
Сортировать по
Популярное Недавнее
Тип
Ресурсы Коллекции
Отобразить настройки
Дата публикации
ЛюбойПоследние 30 днейПоследние 3 месяцаПоследний год
Люди
Исключить Включить
Ориентация
Пейзаж Портрет Квадрат Панорама
ru.freepik.com
Промышленный робот: история, характеристика и особенности
Промышленный робот — это автономное устройство, состоящее из механического манипулятора и программируемой системы управления. Робот применяется при необходимости перемещения объектов в пространстве и выполнения различных производственных функций.
Промышленные роботы играют важную роль в автоматизированных гибких производственных системам (ГПС), позволяющих увеличить производительность труда, а также позволяющие переходить с одного вида продукции на другой с минимальными затратами времени и труда.
История появления первых промышленных роботов
С появлением станков с числовым программным управлением (ЧПУ) возникла необходимость в создании программируемых манипуляторов для разных операций по загрузке и разгрузке станков. Так в 1954 году американский инженер Д. Девол запатентовал способ управления погрузочно-разгрузочным манипулятором с помощью сменных перфокарт. Вместе с Д. Энгельбергом в 1956 г. он организовал первую в мире компанию по выпуску промышленных роботов. Компанию назвали «Unimation» (Юнимейшн), что является сокращением термина «Universal Automation» (универсальная автоматика).С чего всё начиналось — первые промышленные роботы
На фото: Юнимэйт — первыйпромышленный робот
 Позже в 1962 году в Соединенных Штатах были созданы первые промышленные роботы названные «Юнимейт» и «Версатран». Их сходство с человеком ограничивалось наличием манипулятора, отдаленно напоминающего человеческую руку. Что интересно, некоторые из них работают до сих пор, превысив 100 тысяч часов рабочего ресурса.
Позже в 1962 году в Соединенных Штатах были созданы первые промышленные роботы названные «Юнимейт» и «Версатран». Их сходство с человеком ограничивалось наличием манипулятора, отдаленно напоминающего человеческую руку. Что интересно, некоторые из них работают до сих пор, превысив 100 тысяч часов рабочего ресурса.«Юнимейт» имел 5 степеней подвижности с гидроприводом и двухпальцевое захватное устройство с пневмоприводом. «Юнимейт» мог перемещать объекты массой до 12 кг с точностью 1,25 мм. В качестве системы управления использовался программоноситель, имевшего вид кулачкового барабана с шаговым двигателем, рассчитанный на 200 команд управления, и кодовые датчики положения в пространстве. В режиме обучения оператор задавал последовательность точек, через которые должны пройти звенья манипулятора в течение рабочего цикла. Робот запоминал координаты точек и мог автоматически перемещаться от одной точки к другой в заданной последовательности, многократно повторяя рабочий цикл. На операции разгрузки машины для литья под давлением «Юнимейт» работал с производительностью 135 деталей в час при браке 2 %, тогда как производительность ручной разгрузки составляла 108 деталей в час при браке до 20 %.
На фото: Первый робот «Versatran»,
предназначенный для практического
промышленного использования

Робот «Версатран», имевший три степени подвижности и управление от магнитной ленты, мог у обжиговой печи загружать и разгружать до 1200 раскаленных кирпичей в час. В то время соотношение затрат на электронику и механику в стоимости робота составляло 75 % и 25 %, поэтому многие задачи управления решались за счет механики. Сейчас это соотношение изменилось на противоположное, причем стоимость электроники продолжает снижаться. Предлагаются необычные кинематические схемы манипуляторов. Быстро развиваются технологические роботы, выполняющие такие операции как высокоскоростные резание, окраска, сварка.
Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Функциональные особенности промышленного робота
Робот состоит механической части и системы управления этой механической частью. Система управления в свою очередь получает сигналы от сенсорной части. Механическая часть робота подразделяется на манипуляционную систему и систему передвижения.Манипуляторы
Манипулятор — это механизм для управления пространственным положением орудий и объектов труда.
Манипуляторы состоят из подвижных звеньев двух типов:
- Звенья, обеспечивающие поступательные движения.
- Звенья, обеспечивающие угловые перемещения.
Степень подвижности манипулятора определяет сочетание и взаимное расположение звеньев, а также область действия манипуляционной системы робота.
Движения в звеньях могут обеспечивать электрические, гидравлический или пневматический приводы. Частью манипуляторов (но не всегда) являются захватные устройства. Наиболее универсальные захватные устройства аналогичны руке человека — захват осуществляется с помощью механических «пальцев». Для захвата плоских предметов используются захватные устройства с пневматической присоской. Для захвата же множества однотипных деталей (что обычно и происходит при применении роботов в промышленности) применяют специализированные конструкции. Вместо захватных устройств манипулятор может быть оснащен рабочим инструментом. Это может быть пульверизатор, сварочные клещи, отвёртка и т. д.
Система передвижения
Внутри промышленных объектов для передвижения промышленных роботов используются передвижения вдоль монорельс, по напольной колее и т.д.Для перемещения по наклонным, вертикальным плоскостям используются системы аналогичные «шагающим» конструкциям, но с пневматическими присосками.
Управление промышленными роботами
Управление бывает нескольких типов:- Программное управление — самый простой и часто употребляемый тип системы управления, используемый для управления манипуляторами на промышленных объектах. При таком типе управления в роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Для программирования таких роботов могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, Си. В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Может происходить с помощью ПК или программируемого логического контроллера.
- Адаптивное управление — в отличии от программного способа управления в случае роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, которые передаются датчиками, анализируются и в зависимости от результатов принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
- Основанное на методах искусственного интеллекта.
- Управление человеком (например, дистанционное управление).
Принципы управления
Современные промышленные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом.Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Действия промышленного робота
Среди самых распространённых действий, совершаемых промышленными роботами можно назвать следующие:- перемещение деталей и заготовок от станка к станку или от станка к системам сменных паллет;
- сварка швов и точечная сварка;
- покраска;
- выполнение операций резания с движением инструмента по сложной траектории.
Преимущества использования промышленных роботов
В современном производстве замена людей на роботов очевидна и выражена в следующих преимуществах робота над человеком:- достаточно быстрая окупаемость;
- исключение влияния человеческого фактора на конвейерных производствах, а также при проведении монотонных работ, требующих высокой точности;
- повышение точности выполнения технологических операций и, как следствие, улучшение качества;
- возможность использования технологического оборудования в три смены, 365 дней в году;
- рациональность использования производственных помещений;
- исключение воздействия вредных факторов на персонал на производствах с повышенной опасностью.
techliter.ru