Как работает робот? Устройство робота простыми словами
В 1920 году чешский писатель Карел Чапек придумал название для механизма, изобретенного для выполнения работы вместо человека — “робот”. Определение со временем прижилось и с конца XX столетия стало обозначать систему узлов, датчиков и механизмов, предназначенную для выполнения набора операций в соответствии с заложенной программой.
Прогресс науки и техники позволил инженерам-конструкторам создавать все более совершенные машины, способные заменить человека в экстремальных условиях: в космосе, под водой, на поле боя. Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
(Типы роботов)
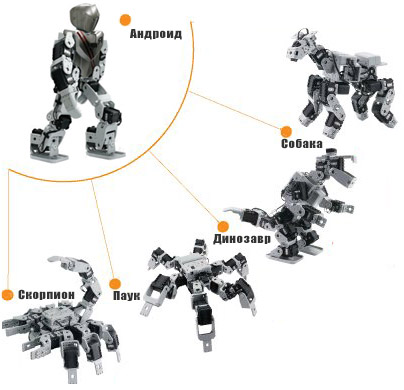
Существуют десятки основных типов роботов, которые отличаются по нескольким параметрам — от назначения до внешнего вида. Для того, чтобы понять, как работает робот, рассмотрим его вид, наиболее приближенный к облику человека — робот-андроид.
Материалы для изготовления
Материалы, которые используют для получения узлов, механизмов и каркаса робота, зависят от нескольких факторов:
- Назначения машины;
- Условий ее работы;
- Заданных характеристик (веса, габаритов).
Наиболее часто используют полимеры всех типов, сталь с добавками, повышающими гибкость и прочность, алюминий, резину, карбоновые материалы, сплавы с содержанием титана.
Конструкция андроида
Человекоподобный робот состоит из нескольких основных частей:
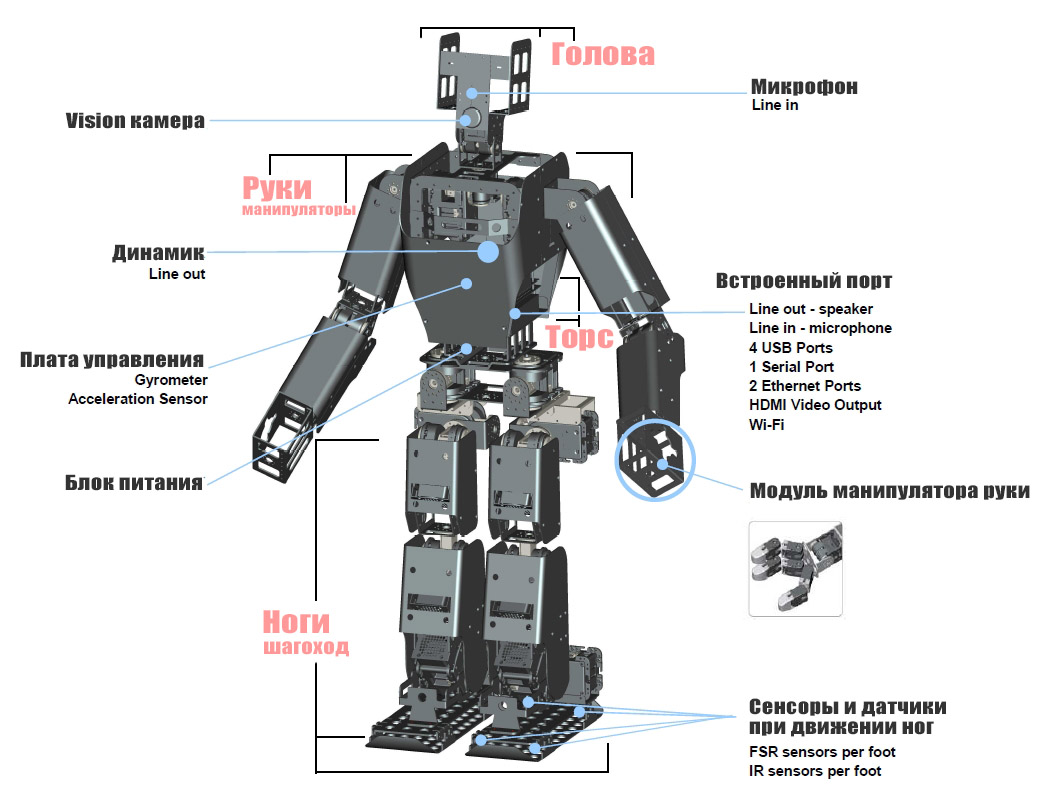
(Наглядная конструкция робота)
Вопреки распространенному мнению, что в голове андроида, как у живого человека, находится “мозг”, т.е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
Торс — наиболее защищенная часть робота. Во внутреннем пространстве каркаса размещают электронику, управляющую системой, автономный источник питания (аккумулятор).
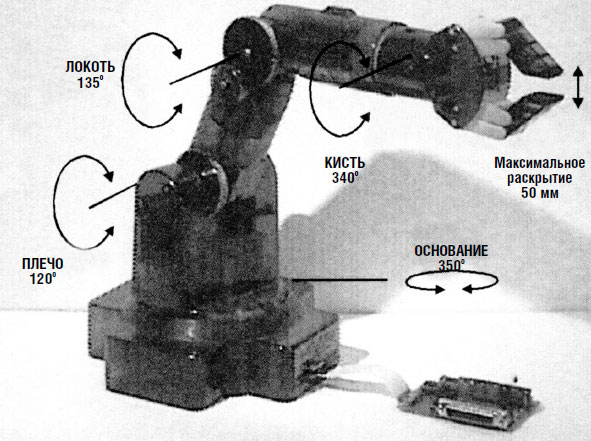
(Классическая рука-манипулятор)
Захват/перемещение груза, выполнение других операций, включая действия с инструментом — задачи для верхних конечностей — манипуляторов. Кистевые окончания могут иметь форму и функцию кистей человека.
Роботы-андроиды передвигаются шагами на двух “ногах”. Шасси копирует антропологические особенности строения человеческого тела: ноги состоят из нескольких составных частей, соединенных суставами-шарнирами. Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Для распознавания окружающей обстановки — предметов, особенностей ландшафта — роботизированные комплексы оснащают видеокамерами (рисунок 1) с высоким разрешением. Их обычно размещают в голове андроида. Благодаря камере (или нескольким камерам) машина может идентифицировать (распознать) окружающие объекты, оценить их размер и расстояние до предметов.
В зависимости от ландшафта или особенностей архитектуры здания робот способен принять решение о способе передвижения и смещении центра тяжести, например, при подъеме/спуске по ступеням или наклонным поверхностям, преодолении рва или препятствия.

(Рисунок 1. Глаз-видеокамера слежения робота)
Видеокамеры оснащают несколькими модулями для получения дополнительной информации:
- В инфракрасном диапазоне;
- В режиме тепловизора.
Кроме камер, конструкция роботов предусматривает использование системы датчиков, которые определяют пространственное положение андроида на местности или в помещении, силу сжатия манипуляторов, скорость перемещения и т.п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
В самой защищенной и просторной части робота устанавливают электронные платы системы управления и автономные источники питания.
Во время выполнения миссии роботом управляет компьютер — набор микросхем, предназначенный для получения, накопления информации, ее обработки и отправления сигналов к исполняющим механизмам, работающих при помощи двигателей (
- Распознавание объектов;
- Распознавание речи;
- Распознавание движений, жестов;
- Самообучение на основании получаемой информации;
- Запоминание внешнего вида объектов, лиц людей.
Поставить задачу перед андроидом можно программным способом, т.е. путем внесения перечня команд в ЦПУ, либо вербально, произнеся набор слов для начала выполнения задачи. Отдельные модели андроидов способны реагировать на жесты рук, изменение местоположения человека.
Система управления роботом очень напоминает построение нервной системы человека в зависимости от его развития:
- Прямое выполнение конкретных команд оператора;
- Необходимость постоянной корректировки действий андроида при выполнении общей задачи;
- Ввод конечной цели (указание направления действий).
В первом случае в памяти машины записаны команды, которые ЦПУ (центральный процессор) подает к исполнительным механизмам для выполнения определенных операций. Например, перемещение робота, изменение положения манипулятора и т.п. по команде оператора. Одна из самых дешевых и простых в изготовлении моделей.
При передвижении андроида из точки А к точке Б вмешательство оператора необходимо в случаях, когда набор алгоритмов (заранее записанных в память действий) не предусматривает преодоление сложных препятствий (к примеру).
Более продвинутый интеллект, получив информацию от системы датчиков, видеокамер, самостоятельно оценивает обстановку и выбирает наиболее оптимальное решение самостоятельно.

(Рисунок 2. Двигатель постоянного тока)
Основным источником энергии для современных роботов-андроидов является электричество. Источник питания может быть:
- Автономным — аккумуляторы, солнечные батареи;
- Внешним — электроэнергия подается по кабелю.
В первом случае машина не привязана к энергоресурсу, способна выполнять задачи на любом удалении от зарядной станции. Из недостатков — увеличенный вес робота, малое время работы. Кабельное снабжение электроэнергией имеет свои плюсы: меньший вес андроида, возможность использования большего числа узлов, датчиков, механизмов, неограниченное время работы.
Манипуляторы копируют структуру рук человека (рисунок 3) и состоят из нескольких частей, соединенных шарнирами:
- Кистевого;
- Предплечья;
- Плечевого.
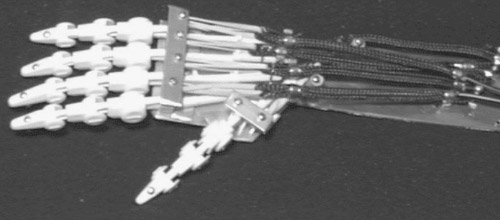
(Рисунок 3. Рука-манипулятор)
Манипуляторы имею несколько степеней свободы, т.е. робот может поднять руки, развести их в стороны, вращать кисти, производить захват предметов «пальцами». Манипуляторы приводятся в действие силовыми механизмами — сервоприводами. Часто для аккуратной и точной работы пальцы оснащают специальными датчиками, которые регулирую силу сжатия. Вместо грузозахватных приспособлений в кистевые отделы манипуляторов устанавливают другие приборы и механизмы: сварочные аппараты и т.д.
По аналогии со строением тела человека роботы-андроиды передвигаются шагами. Конструкция ног предусматривает возможность передвигаться бегом, преодолевать различные препятствия (лестницы, ямы, наклонные поверхности). Ноги, как и руки-манипуляторы, приводятся в действие двигателями (

(Рисунок 4. Шаговой двигатель)
Для всех типов роботов используют несколько типов исполнительных механизмов:
- Механические;
- Электрические;
- Гидравлические;
- Пневматические;
- Гибриды (электромеханические, гидромеханические и т.д.).
Из-за особенностей конструкции роботов-андроидов (небольшие габариты, система шасси — шагоход) для механизации узлов наиболее часто используют сервоприводы или сервомоторы (рисунок 5), основу которых составляет электрический двигатель.

( Рисунок 5. Сервомотор)
В отличие от обычного электромотора, комплектный сервопривод способен:
- С высокой точностью определять и изменять угол положения вала;
- Потреблять ровно столько электроэнергии, сколько необходимо для выполнения определенного действия;
- Снижать нагрузку на детали робота, увеличивая их ресурс.
Работа-действие робота
Пример работы всех систем робота-андроида в связке

- Тип робота: андроид
- Способ управления: автономный
- Задача: преодолеть лестничный пролет
- После включения питания загружается ЦПУ, которая проводит проверку всех систем.
- После получения подтверждения об исправности машины компьютер стабилизирует вертикальное положение андроида при помощи гироскопа, оценивает препятствие камерами.
- Установив дальность до первой ступени и ее высоту, расстояние до других близко расположенных объектов, робот начинает движение.
- Сервоприводы приводят в действие нижние конечности, которые поднимают опорные площадки (стопы) на нужную высоту.
- Равновесие машины поддерживает гироскоп.
- После преодоления последней ступени робот останавливается либо продолжает движение вперед в зависимости от программы или полученной команды.
Робототехника на пальцах

Кто такие роботы?
Слово робот происходит от чешского слова «робота», что означает «каторжный труд» или «работа». Сегодня мы используем слово «робот», чтобы обозначить любую искусственную машину, которая может выполнять работу или иные действия, обычно выполняемые людьми, либо автоматически, либо с помощью дистанционного управления.
Что делают роботы?
 Представьте себе, если ваша работа состоит в том, чтобы закручивать один винт на тостере. И вы делаете это снова и снова, день за днем, в течение нескольких недель, месяцев или лет. Такая работа лучше подходит роботами, чем людям. Большинство роботов сегодня используются для выполнения повторяющихся действий или работ, которые считаются слишком опасными для человека. Например, робот идеально подходит для разминирования бомб. Роботы также используются на заводах, чтобы производить такие вещи, как автомобили, конфеты и электронику. Роботы в настоящее время используются в медицине, в военной технике, для обнаружения объектов под водой, или для исследования других планет и т.д. Роботизированные технологии помогли людям, потерявшим руки или ноги. Роботы являются отличным помощниками всего человечества.
Представьте себе, если ваша работа состоит в том, чтобы закручивать один винт на тостере. И вы делаете это снова и снова, день за днем, в течение нескольких недель, месяцев или лет. Такая работа лучше подходит роботами, чем людям. Большинство роботов сегодня используются для выполнения повторяющихся действий или работ, которые считаются слишком опасными для человека. Например, робот идеально подходит для разминирования бомб. Роботы также используются на заводах, чтобы производить такие вещи, как автомобили, конфеты и электронику. Роботы в настоящее время используются в медицине, в военной технике, для обнаружения объектов под водой, или для исследования других планет и т.д. Роботизированные технологии помогли людям, потерявшим руки или ноги. Роботы являются отличным помощниками всего человечества.
Зачем использовать роботов?

Причина использования роботов достаточно проста и понятна. Дело в том, что использовать роботов часто бывает дешевле, чем людей. Для роботов проще оборудовать рабочие места, а иногда внедрение роботов является единственным возможным способом решения некоторых задач. Роботы могут исследовать изнутри топливные резервуары, вулканы, путешествовать по поверхности Марса или в других местах, слишком опасных для людей. Роботы могут делать одно и то же снова и снова, и им не станет скучно. Они могут сверлить стены, варить трубы, красить машины, обращаться с токсичными веществами. А в некоторых ситуациях роботы намного более точны и могут сократить издержки производства из-за человеческих ошибок. Роботы никогда не болеют, им не нужно спать, они не нуждаются в пище, обходятся без выходных и, что лучше всего, они никогда не жалуются!
Из чего состоят роботы?
Роботы могут быть сделаны из различных материалов: металл, пластмасса и многое другое. Большинство роботов состоят из 3-х основных частей:

- Контроллер или «мозг» робота, работающий с помощью компьютерной программы. Здесь хранятся алгоритмы, с помощью которых робот выполняет различные манипуляции.
- Механические части: двигатели, поршни, механизмы захвата, колеса и шестеренки, благодаря которым робот способен двигаться, перемещать предметы, поворачиваться и т.д.
- Датчики преобразует полученную информацию в удобную форму для дальнейшей передачи. Датчики позволяют роботу ориентироваться на местности, определить размеры, форму, расстояние между объектами, направление и другие характеристики и свойства веществ. Часто на роботы устанавливают датчики давления, которые могут определять величину давления, необходимую для того, чтобы схватить предмет не повреждая его.
Искусственный интеллект

Изначально искусственный интеллект разрабатывался с целью воссоздания человеческого разума, однако в настоящее время большое количество исследований сфокусировано на так называемом роевом интеллекте – особом типе разума, который проявляется в совместной деятельности насекомых или в работе большого числа простых роботизированных механизмов. Принципы роевого интеллекта могут быть использованы, например, при создании нанороботов.
Изначально искусственный интеллект разрабатывался с целью воссоздания человеческого разума, однако в настоящее время большое количество исследований сфокусировано на так называемом роевом интеллекте – особом типе разума, который проявляется в совместной деятельности насекомых или в работе большого числа простых роботизированных механизмов. Принципы роевого интеллекта могут быть использованы, например, при создании нанороботов.
Ограничения роботов

К сожалению, роботы не могут, как в кино, думать или принимать решения. Роботы – это машины с запрограммированными движениями, которые позволяют им перемещаться в определенных направлениях с заданной последовательностью действий. ИИ позволяет роботам обрабатывать полученную информацию и даже обучаться. Но они все еще имеют существенные ограничения, так как способны понимать лишь определенные типы информации, и выполнять лишь ограниченный набор функций, заложенный в них при создании.
робототехника искусственный интеллект
Как устроены роботы. Часть 1
Городской робот NASA имеет программно-управляемые камеры и датчики, которые позволяют ему работать автономно в разных условиях. URBIE исследует области, которые могут представлять потенциальную опасность для человека.
На самом базовом уровне, человеческие существа состоят из пяти основных компонентов:
— Структура тела
— Мышечная система для перемещения тела
— Сенсорная система, которая получает информацию о теле и окружающей среде
— Источник питания для активации мышц и датчиков
— Мозг, который обрабатывает информацию от сенсорной системы и управляет мышцами.
Конечно, у нас есть и несколько нематериальных атрибутов, таких как интеллект и мораль, но на чисто физическом уровне они также входят в приведенный выше список.
Робот состоит из тех же самых компонентов. Типичный робот имеет подвижную физическую структуру, какой-либо электродвигатель, сенсорную систему, блок питания и компьютерный «мозг», который управляет всеми этими элементами. По существу, роботы – искусственная версия живой жизни, это машины, которые копируют поведение людей и животных.
В статье далее рассмотрены основные концепции и принципы работы робототехники.
Joseph Engelberger, пионер промышленной робототехники, однажды заметил: «Я не могу определить, что такое робот, но я узнаю его, когда увижу.» Если вы рассмотрите все разнообразные типы машин, которые люди называют роботами, можно заметить, что почти невозможно придумать для них всеобъемлющего определения. Есть различные мнения о том, что представляет собой робот.
Вы, наверное, слышали что-то о некоторых из этих известных роботов:
— R2D2 и C-3PO: интеллектуальные роботы в фильмах «Звездные войны»
— Sony AIBO: роботизированная собака, которая обучается через взаимодействие с человеком
— Honda ASIMO: робот, который может ходить на двух ногах, как человек
— Промышленные роботы: автоматизированные машины, которые работают на сборочных линиях
— Человекоподобные андроиды из «Star Trek»
— Battlebots: дистанционно управляемые бойцы
— Марсоходы NASA
— HAL: бортовой компьютер корабля в фильме Стэнли Кубрика «2001: Космическая одиссея»
— Робот-газонокосилка
— Робот в телесериале «Затерянные в космосе»
— Mindstorms: популярной комплект робототехники Лего.
Все эти системы считаются роботами. К этому приводит широкое толкование слова робот. Большинство робототехников (люди, которые конструируют роботов) используют более точное определение. Они отмечают, что роботы имеют перепрограммируемый «мозг» (компьютер), который управляет телом.
Согласно этому определению, роботы отличаются от других перемещающихся машин, таких как автомобили, наличием компьютерного управления. Сегодня многие автомобили имеют бортовой компьютер, но функции его ограничены. Вы контролируете большую часть элементов управления в автомобиле непосредственно через различные механические устройства. Роботы также отличаются от обычных компьютеров своей физической конструкцией — стандартные компьютеры не имеют связанного с ними физического тела.
В следующий раз мы рассмотрим основные компоненты, из которых состоят современные роботы.
Ученые впервые создали робота полностью из живых клеток — Российская газета
Ученые из Университета Вермонта в США, опубликовали отчет о создании первого в мире робота, состоящего полностью из живых клеток. Об этом сообщается на официальном сайте университета.
Пока эти новые роботы имеют размер всего в один миллиметр, однако при этом обладают уникальными свойствами. Они могут двигаться к нужной цели по команде, захватывать с собой груз (например, лекарство) и доставлять его в необходимое место, а также полностью самовосстанавливаться после повреждений.
Это изобретение может в значительной мере повлиять на прогресс человечества, потому что открывает целое новое направление в робототехнике и медицине. В перспективе роботы могут быть живыми и состоять из мышц, как человек, или, наоборот, человек может получить новые роботизированные мышцы и органы в замен поврежденных. Кроме этого, микроскопические роботы могут, например, двигаться по сосудам, восстанавливая их.
Команда ученых, которая создала новых живых роботов, назвала их ксеноботами. Клетки были взяты из эмбрионов лягушки и перераспределены в совершенно новые формы жизни.
— Это новые живые машины, — рассказывает специалист по компьютерным технологиям и робототехнике в Университете Вермонта Джошуа Бонгард, который был одним из руководителей нового исследования. — Они не являются ни традиционным роботом, ни известным видом животных. Это новый класс артефактов: живой, программируемый организм.
По заявлению ученых, новые существа были разработаны на суперкомпьютере в UVM, а затем собраны и протестированы биологами в Университете Тафтса (штат Массачусетс, США).
— Мы можем представить себе множество полезных применений этих живых роботов, которые не могут сделать другие машины, — говорит руководитель Центра регенеративной биологии и биологии развития в Тафтсе Майкл Левин. — Например, поиск опасных соединений или радиоактивного загрязнения, сбор микропластика в океанах. Также ксеноботы могут курсировать по артериям человека, чтобы вычищать образующийся там налет.
Новые живые роботы строились из клеток, которые были собраны у эмбрионов африканских лягушек, вида Xenopus laevis (отсюда и название — ксеноботы). Ученые проделали огромную работу, сохраняя и развивая те смоделированные организмы, которые работали хорошо, и удаляя неудачные проекты. В итоге телам новых роботов придали четыре «конечности» и небольшое углубление посередине. По форме они напоминают перевернутую табуретку, а их размер — чуть больше булавочной головки. Однако, эти тела с формой, которая никогда не встречается в природе, начали действовать совместно по воле человека и выполнять поступающие приказы.
— Ксеноботы полностью биоразлагаемы, — рассказывает специалист по компьютерным технологиям и робототехнике в Университете Вермонта Джошуа Бонгард, — После того как они закончили свою работу, через семь дней они становятся просто мертвыми клетками кожи и могут быть легко утилизированы, не нанося вред экологии.
Еще одним уникальным свойством живых роботов является их возможность полной регенерации, что потенциально открывает путь к бессмертию человека.
— Возьмите ваш ноутбук. Это мощная вычислительная техника. Но разрежьте его пополам — и он не будет работать, — рассказывает Джошуа Бонгард. — В своих экспериментах мы разрезали ксеноботов почти пополам и наблюдали за тем, что происходило. Они снова сами сшиваются и продолжают действовать. Это уникальное свойство, которым не обладают типичные машины.
Основы робототехники. Виды роботов. Теория робототехники
Робототехника – это относительно новое и очень развивающееся направление в научной деятельности, появившееся благодаря потребности в тотальной автоматизации нынешнего производства и в повышении его эффективности. Идея создать какой-то автономный механизм, который бы своим внешним видом напоминал человека или другое живое существо терзала мечтателей ещё с незапамятных времен. Ещё Гомер в своем произведении «Илиада» говорил о том, что бог огня и покровитель кузнечного ремесла, выковал из золота девушек, которые исполняли его поручения.
Теория робототехники опирается на такие науки, как информатика, электроника, механика.
Робототехника бывает нескольких видов:
- Промышленная
- Строительная
- Бытовая
- Авиационная
- Экстремальная (военная, космическая и подводная).
Сегодня люди очень близко подошли к тому моменту, когда роботы будут участвовать во всех сферах жизни и деятельности человека. Именно поэтому изучение робототехники необходимо внедрять в образовательные учреждения.

Изучение робототехники позволяет постичь программирование, алгоритмизацию, основы логики и т.д. Какие же бывают роботы? А их всего два вида: манипуляционные и мобильные роботы.
Манипуляционный робот – это автоматическая машина, которая состоит из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления (микроконтроллер), которое служит для выполнения двигательных и управляющий функций в процессе работы. Подобные роботы очень распространены в приборостроении и машиностроении.
Мобильный робот – автоматическая машина, в которой имеется механизм перемещения с автоматически управляемыми приводами. Такие роботы могут быть колесными, летающими, шагающими, гусеничными, плавающими и даже ползающими!

Роботы состоят из самых разных компонентов. Приводы, ДПТ, шаговые электродвигатели и т.п.
Приводы – это так сказать «мышцы» любого робота. Именно эти механизмы обеспечивают движение рабочих частей робота (руки, ноги, поворот колес, поворот закрылков).
ДПТ (Двигатели постоянного тока) – обычный двигатель, который работает на постоянным током. Лёгок и прост в использовании, поэтому является одним из самых популярных двигателей.
Шаговые электродвигатели – это двигатель, вал которого поворачивается на заданный угол под управлением микроконтроллера, а не вращается свободно, как у ДПТ. Это позволяет обойтись без датчика положения, ибо угол на который сделан поворот, заведомо известен. Именно поэтому данный вид двигателей часто используется в приводах многих роботов и станках с ЧПУ.

Все эти базовые знания и основные навыки конструирования и создания роботов дети уже с 3-ёх лет могут получить в нашем учреждении дополнительного образования. Кроме прослушивания теории на занятиях ребята и девчата имеют полный доступ к оборудованию и закрепляют пройденные темы, выполняя практические задания.
Как распознать робота
Добро пожаловать на курс «Робототехника». В первом модуле вы узнаете:
• как могут выглядеть роботы;
• что такое робот и как его распознать;
• какие дополнительные элементы может иметь робот;
• что может заставить робота двигаться;
• где встречаются роботы дома и в городе;
• что умеют роботы и в каких областях им уже нашлось применение.
Что такое робототехника
Познакомьтесь с ментором курса: Николай Пак, основатель «Лиги Роботов», федеральной сети секции робототехники. В этом видео он расскажет о том, что такое робототехника, каковы основные составляющие робота и какие он может выполнять задачи.
Такие разные
Услышав слово «роботы», вы наверняка представляете себе что-то хотя бы отдаленно похожее на человека или животное. Однако в жизни это не всегда так: форма, вид и размер робота определяются задачей, которую он решает.
Кто здесь робот?
Все объекты на картинках — роботы, каждый из них автоматизирует какую-то работу, выполняя заранее заданную функцию.
Антропоморфный робот заменяет человека на опасной работе
Кодовый замок «охраняет» вход в здание
Стиральная машина берет на себя стирку, полоскание и отжим
Дрон обеспечивает обзор с высоты без участия пилота
Фитнес-браслет считает шаги и потраченные калории вместо тренера
Понять, кто перед вами, помогут общие для всех роботов признаки. О них мы поговорим в следующей части модуля. Пока важно запомнить: робот может выглядеть как угодно.
Что робототехники называют роботом?
Как видите, внешнее сходство с живыми существами — не обязательный признак робота. По мнению специалистов, робота можно описать так:
Как следует из определения, робот может выглядеть как угодно. Роботом его делают «признаки робота», а не внешний вид. Давайте разберемся.
Как устроен робот и как он работает
Каждый робот — это набор конкретных деталей, а зачастую и программ, подобранных для выполнения нужных нам действий. Но чем бы ни занимался и из чего бы ни состоял наш робот, для совершения действия он всегда будет собирать информацию, анализировать ее и действовать по результатам этого анализа.
Изучите схему, чтобы узнать, что делают привычные вам роботы на каждом из этапов и какие устройства при этом задействуют.
Шаг 1 — Ухо.
Робот получает информацию или испытывает воздействие извне. Для этого он использует датчики, сенсоры и другие устройства. Сенсор движения, который включает электричество, когда мы входим в помещение, валидатор проездного в метро, микрочип для распознавания голоса в голосовых помощниках — все это устройства для получения информации из окружающей среды.
Шаг 2 — Мозг.
Робот перерабатывает полученную информацию по заранее заданному алгоритму. В разные времена и в разных ситуациях алгоритм работы задавали по-разному. Так, первые механические роботы начинали двигаться, когда их заводили, как часы. Сегодня «решение» обычно принимает маленький бортовой компьютер — микроконтроллер с записанной на него программой. Скажем, на основе данных с сенсора движения микроконтроллер дает освещению команду включиться или выключиться. Другой микроконтроллер решает, открывать ли турникет метро. Третий сопоставляет голосовую команду с заданным алгоритмом и по просьбе хозяина включает телевизор. Это — устройства анализа полученной информации.
Шаг 3 — Рука.
Робот выполняет нужную операцию. Программа или механизм решают, приводить робота в действие или нет. Если да — он включается и делает то, для чего предназначен. Свет включается будто сам собой, турникет метро открывается и пропускает пассажира, телевизор включается на нужной программе — это устройства, которые исполняют команды.
Как понять, что перед вами робот? Обязательные элементы
Определить, робот перед вами или нет, можно, обратив внимание на характерные признаки. У робота всегда есть:
Система датчиков — через нее робот получает информацию из внешнего мира. Например, это датчики движения, сенсоры обнаружения препятствий и т. п.
Цель — «смысл жизни робота», та задача, ради автоматизации которой его придумали.
Алгоритм действий — по нему робот выполняет нужные действия в разных условиях в соответствии с поставленной целью (сегодня это обычно программа, раньше мог быть механизм).
Исполняющее устройство — двигатель, «руки», «ноги». То, что приводит робота в действие или изменяет его положение в пространстве.
Система, в которую объединены первые четыре пункта, то, как они связаны и взаимодействуют.
Что часто добавляют к роботам. Дополнительные элементы
Датчик, алгоритм, исполняющее устройство — это основа, заложенная внутрь любого робота. Но обойтись только этим набором сложно. Чтобы робот мог решать больше задач, а работать с ним было удобнее, к основе часто добавляют разные детали. Ниже мы собрали самые популярные (но помните, что одними ими список не ограничивается).
Как заставить робота работать: 5 основных способов
Итак, роботы могут выглядеть по-разному, состоять из различных деталей и выполнять какие угодно задачи. Приводить их в действие тоже можно разными способами — одни известны веками, другие появились у человечества недавно.
Роботы бывают:
Механические
Заводные механические устройства использовали еще древние греки, а первый антропоморфный механический робот появился в XII веке у арабов. В наши дни механику блестяще использует нидерландский художник Тео Янсен: его знаменитые «шагающие фигуры» приводятся в действие ветром, прибоем или человеком.
Гидравлические
Такие роботы используют в работе законы движения жидкостей. Регулируя уровень и давление жидкости в системе, мы добиваемся от устройства нужных действий. Таких роботов часто можно встретить в промышленности: они способны прикладывать огромную силу и при этом работать быстро и аккуратно. Именно гидравлические приводы часто используются у роботов-грузчиков
Электронные
Первым таким роботом принято считать миниатюрное радиоуправляемое судно, которое разработал в конце XIX века Никола Тесла. В 1930-х появились первые устройства, которые напоминали человека и могли выполнить простейшие действия и даже воспроизводить отдельные фразы. Сегодня электронные элементы в роботах используются очень широко, но зачастую в комбинации с другими типами систем.
Софтверные
Это роботы-программы, которые умеют взаимодействовать с объектами реального мира и давать осязаемый результат. «Умный дом» в городе, «умная теплица» на ферме, «умный климат-контроль» в офисе, программа, которая включает сеть уличного освещения по расписанию — это тоже роботы.
Комбинированные роботы
Самый распространенный на сегодня вид роботов. Одного принципа работы часто не хватает для решения продвинутых задач, и инженеры соединяют внутри робота несколько систем. Например, фитнес-браслет тоже использует механическую составляющую: электронная энергия преобразуется в механическую энергию вибрации, и браслет дает вам знать, что вы засиделись.
Очевидное-невероятное: почему чат-бот, квадрокоптер и фитнес-браслет тоже роботы
Любые устройства и программы могут считаться роботами при условии, что они делают что-то осязаемое и соответствуют другим признакам роботов. Давайте разберем это утверждение на нескольких примерах из современной жизни.
Чат-бот не робот, а обычная программа, если он:
получает от вас вопрос, ищет ответ в поисковике и выдает его вам — это всего лишь программа, связанная с другими программами, он действует в виртуальном мире.
Чат-бот — это софтверный робот, если он:
получает от вас сообщение и выключает розетку или настраивает ее работу по таймеру — он дает ощутимый результат, заметный вне виртуальной среды.
Беспилотный дрон — это классический робот: у него есть цель, система датчиков, алгоритм, управляющие устройства — система стабилизации, двигатели и т. д.
Квадрокоптер — это радиоуправляемый робот. Хотя направление движения ему задает человек (оператор) с земли, устройство само стабилизирует свое положение в пространстве, а потому может считаться роботом.
Фитнес-браслет тоже робот. Он призван заменить нам тренера в простейших ситуациях и автоматизировать записи о физической активности, то есть у него есть цель. Он определяет движение, уровень нагрузок или состояние сна за счет встроенной системы датчиков, работает по алгоритму и оказывает прямое воздействие на окружающую среду (например, вибрирует, напоминая человеку, что тот долго сидит — пора бы встать и немного размяться).
Роботы повсюду: где они встречаются в городе и дома
Мы уже говорили о том, что под влиянием научной фантастики люди считают роботами только те устройства, что похожи на людей или животных. Но мы-то с вами знаем, что роботом можно назвать любое устройство или программу, которые имеют цель, алгоритм и связаны с внешним миром через датчики и исполняющие устройства. Такие роботы давно и прочно вошли в наш обиход — и люди сталкиваются с ними каждый день, сами того не замечая.
Роботы у нас дома
1. Стиральная машина:
Стиральная машина получает указания, запускает нужную программу, а затем с помощью датчиков следит за температурой и уровнем воды. В конце она сама разблокирует дверцу и подает сигнал об окончании стирки.
2. Система управления «умным домом» (на столе):
Системы голосового управления начинают входить в нашу жизнь. Так, свыше 30 млн человек в России пользуются голосовыми помощниками на мобильных устройствах и дома. Такие роботы бывают исключительно софтверным (как Siri компании Apple или Алиса компании «Яндекс»), а могут выпускаться и в виде устройств-колонок — Amazon Echo, Google Home, «Яндекс.Станция». Они оборудованы системой распознавания голоса и реагируют на внешний мир включением и выполнением команд, заданных программой.
3. Робот-пылесос:
Робот-пылесос может убирать по расписанию и в заданном режиме, а может включаться по требованию и убирать все пространство или отдельную зону. Датчики позволяют ему не застрять под мебелью, а в случае внештатной ситуации робот подаст звуковой сигнал. Одна только компания iRobot, известная роботом-пылесосом Roomba, продала по всему миру более 20 миллионов своих устройств — и это не единственный производитель.
4. Термометр на стене:
«Умный дом» — частный случай софтверных роботов. Климат-контроль в помещении может запускать определенные режимы по таймеру или в соответствии с показаниями датчиков. Когда на улице темнеет или светает, система сама регулирует освещение. «Умный дом» получает информацию извне через систему датчиков, а выполняет свои функции по заданным алгоритмам через электропроводку, динамики, включение или выключение дополнительных устройств и другие элементы
5. Датчик на двери в соседнюю комнату:
Датчики — важная часть системы «умного дома». Они умеют извлекать из окружающей среды самую разную информацию, а система, обработав эту информацию, совершает заданное действие. Например, датчик движения на двери реагирует на ее открытие или закрытие и посылает сигнал на микроконтроллер, который зажигает в комнате свет.
Конечно, на картинке представлены далеко не все роботы, которые способны помогать в быту. У того же робота-пылесоса есть младший брат — небольшой вакуумный пылесос, который ползает по столу и собирает крошки. Есть и двоюродный брат — вакуумный мойщик окон.
Уже появились роботы, которые:
носят за хозяином покупки
моют посуду и сантехнику
готовят еду
кормят и развлекают домашних питомцев в отсутствие хозяина
Роботы для гостиниц, баров и торговых центров
1. Роботы-рецепционисты могут зарегистрировать постояльца, выдать ему карту-ключ и ответить на простейшие вопросы. Им не нужны перерывы и выходные, поэтому из них получаются прекрасные помощники администраторов.
2. Робот-бармен принимает заказ через мобильное приложение и наливает клиенту выбранный напиток, либо смешивает коктейль по просьбе или даже рецепту посетителя. Некоторые версии способны распознавать речь клиента и отвечать ему. Уже разработан робот-бариста, который наливает кофе и выдает конфеты, на очереди — робот-повар, который будет готовить хот-доги, картошку фри и даже блины.
3. Робот-носильщик получает команду, в какой номер надо отнести вещи гостя, и доставляет их самостоятельно. В номере его встречает другой робот, который разложит вещи по ячейкам, а перед отъездом аккуратно уложит обратно в чемодан.
4. Роботы-уборщики по заданному расписанию чистят полы, аккуратно избегая столкновений с людьми и время от времени возвращаясь на базу для подзарядки и обслуживания: им надо регулярно освобождать контейнер для пыли и чистить щетки и фильтры.
5. Камеру хранения тоже можно доверить роботу. Достаточно положить сумку или чемодан в специальное окошко — и роборука поместит его в отдельную ячейку.
Роботы на улицах города
1. Дроны помогают городским службам и полиции следить за оперативной обстановкой на улицах. На основе данных с камер дрона оператор может удаленно отрегулировать светофор или прислать специалистов на место аварии. У дрона есть камеры, а оператор в случае необходимости дает команду — и дрон меняет высоту, направление или скорость.
2. Дроны-доставщики умеют приносить заказ из ресторана или покупки из магазина. Они оборудованы GPS, чтобы добраться по нужному адресу, и устройством распознавания лиц — узнав заказчика, микроконтроллер дает манипулятору команду выпустить заказ.
3. Современные камеры автоматически засекают нарушителей на дорогах: у них есть детекторы скорости и система распознавания номеров. Если скорость превышена, они автоматически отправляют данные в систему, которая выписывает штраф (то есть действуют самостоятельно по заданному алгоритму).
4. Роботы-полицейские патрулируют улицы и обеспечивают безопасность. Скажем, в Пекине это уже реальность. Там они оборудованы системой распознавания лиц, чтобы засекать угрозу, рукой-электрошокером (ею управляет диспетчер), динамиками и камерами. При необходимости такой робот может проверить документы — обратиться к прохожему через динамик и камерой передать изображение документа диспетчеру. Тестируют полицейских и в других городах.
5. Колесные дроны уже тестируются компанией Amazon, чтобы в будущем полностью автоматизировать городскую доставку. Дрон движется по тротуару на шести колесах, огибая пешеходов, а распознав заказчика, открывает крышку и позволяет забрать заказ.
6. Кнопка на переходе реагирует на нажатие, после чего микроконтроллер через заданное алгоритмом время меняет свет на зеленый.
Робот на коленке
В этом видео ментор курса Николай Пак расскажет, как собрать робота из подручных материалов. Пока смотрите видео, постарайтесь запомнить, на какие вопросы нужно ответить, когда делаешь робота.
Если вы решитесь собрать такого робота самостоятельно — вот инструкция, как это сделать.ПЕРЕЙТИ КО ВТОРОМУ МОДУЛЮ
Робототехника. Модуль 3
В этом модуле вы узнаете:
• какие специалисты точно нужны для создания роботов и как с ними работать;
• как выбирают, из чего сделать робота;
• почему без математики робот не сможет перемещаться;
• кто учит роботов «ходить» и «видеть».
Команда робототехников: основные участники
В первом модуле курса мы говорили о том, что робота вполне можно сделать самостоятельно, были бы подручные материалы и толика вдохновения. В разработке промышленных, военных и других сложных роботов этого недостаточно, здесь нужны квалифицированные инженеры разной специализации.
Конкретный состав команды зависит от задачи. В несложных проектах какой-то специалист может и не потребоваться; бывает и так, что один инженер выполняет две-три роли. Когда же речь идет о строительстве марсохода, команда нужна большая, и специалистов одного профиля может быть несколько.
В этом модуле мы поговорим о том, какие специалисты нужны в команде, которая строит современного гибридного робота.
Инженер-мехатроникПодбирает размеры и конструкцию отдельных элементов робота, а также материалы, из которых должны быть изготовлены детали.
Инженер-математик
Выбирает математические модели, которые помогут роботу собирать информацию об окружающем мире, анализировать ее и действовать в соответствии с ней.
Инженер-программист
Создает алгоритмы, по которым робот взаимодействует с окружающей средой.
Инженер-электроник
Отвечает за подбор микроконтроллеров, плат, проводов, блоков питания и других электронных элементов.
Теперь расскажем подробнее о каждом из этих инженеров.
Инженеры-математики
Робот воспринимает мир не так, как мы: у него нет органов чувств, он вынужден полагаться на цифры. Данные с датчиков — это числа. Алгоритмы, которые управляют его поведением в зависимости от полученной информации, тоже оперируют числами. Благодаря этим числам робот может перемещаться, распознавать объекты и голоса, манипулировать предметами. Словом, без математики в робототехнике не обойтись.
Робот-пылесос, марсоход Curiosity и футуристичные микродроны, опыляющие растения вместо пчел, — всем им приходится исследовать новое пространство, будь то квартира, поля вокруг фермы или кратер чужой планеты. Такие роботы должны уметь самостоятельно изучать местность, создавать ее карты и выбирать оптимальные маршруты для перемещения.
Ведь что знает о вашей комнате робот-пылесос, который вы только что достали из коробки, зарядили и торжественно выпустили в мир, полный пыли, крошек, кошачьей шерсти и разнообразных опасностей — от ножки стола до озадаченных домашних животных? Почти ничего, кроме, может быть, данных о некотором ближайшем окружении. Здесь на помощь приходит математика, а точнее — графы. Не пугайтесь, вы уже видели их на схеме линий метро. Граф — это набор соединенных точек: благодаря линиям мы можем найти оптимальный путь между точками. С помощью графов навигатор в вашей машине умеет строить кратчайший маршрут.
Робот-пылесос, ловко уворачиваясь от кошки и ножек стола, тоже записывает данные о местности в виде графа: отдельные объекты становятся точками — вершинами графа, а переходы от одной точки к другой — ребрами. При этом ребро можно построить только тогда, когда переход из одной вершины в другую совершен (до этого момента робот «не знает» о существовании ребра). Так он и ползает деловито по ребрам между вершинами, пока не приберет всю квартиру. Информация о пройденных ребрах и вершинах остается в памяти, так что по второму кругу на одном месте убирать он не будет.
Инженеры-программисты
Когда мы определили, как робот будет двигаться и по какой формуле станет обрабатывать полученные данные, приходит время научить его, как следует вести себя в разных ситуациях. Инженеры-программисты помогут роботам выбрать план действий в зависимости от показаний датчиков.
Программы нужны, чтобы…
Помочь роботу вовремя снять показания с датчиков. Задача программы — дать роботу порядок действий: вот так получаешь информацию из внешнего мира, вот так с ней поступаешь. Например, именно на уровне программы определяется, с какой частотой робот снимает данные с датчиков в память. Когда речь идет о метеостанции, программу для снятия данных достаточно запускать несколько раз в сутки. В случае с беспилотным автомобилем ситуация другая: информацию с датчиков необходимо получать в режиме реального времени, чтобы обеспечить безопасность всех участников движения.
Помочь роботу принять верное решение на основе данных датчиков. Получив данные, программа соотносит их с некоторым эталонным значением. Допустим, программа дает сигнал промышленному манипулятору переместить предмет. Датчики манипулятора сообщают программе, как он расположен в пространстве, открыт или закрыт захватный механизм, есть ли в нем груз. Сравнивая показания датчиков с эталонными для текущей ситуации значениями, программа корректирует его действия. Эталонной величиной может быть, например, градус наклона манипулятора. Если робот действует в зависимости от температуры, это и будет его эталонной величиной. Если его функция связана со скоростью, то эталонная величина — минимальная или максимальная скорость.
Помочь роботу «видеть» и распознавать объекты. Вы уже знаете, как графы помогают роботам двигаться. Теперь давайте посмотрим, как они помогают «видеть». Любым роботам, которые манипулируют объектами, необходимо уметь различать их между собой. Камеры и алгоритмы распознавания позволяют фактически научить робота «видеть» окружающий мир.
Одна из задач в процессе распознавания образов — выделение контуров объектов. Тут графы и приходят на помощь. Например, они помогают выделить подконтуры. Компьютер не видит, как человек, весь объект целиком, а может только распознать отдельные части, сопоставить с другими изображениями и достроить целое. Подконтуры, то есть контуры частей, помогают собрать объект воедино, составить общую картинку.
Те же графы позволяют построить модель поверхности объекта: горизонтальная, вертикальная, с изгибом, здесь выпуклая, тут вдавленная. Сличая разные поверхности из своей базы, робот «понимает» форму объекта. Сравнивая контуры одного и того же объекта, программа может сделать вывод, что он переместился (она сопоставляет два контура и «понимает», что они похожи, значит, положение объекта изменилось).
Инженеры-электроники
Без правильной настройки электронных схем и компонентов роботы не будут функционировать. Построить робота самостоятельно, ничего не зная о его электронной части, невозможно. В дело вступают инженеры-электроники.
Сегодня больше всего распространены гибридные роботы. Они состоят из двух и более систем с разными принципами работы. Почти всегда в них есть электроника: платы, провода, микросхемы. Значит, в команду разработчиков робота нужен инженер-электроник.
Задача электротехники — соотнести требования программного обеспечения с реальностью. Важно правильно подобрать комплектующие и тщательно их настроить.
Это особенно критично, когда все компоненты робота создаются с нуля. Готовые модули построены и проверены производителем, их параметры продуманы заранее. Однако для некоторых специфических задач они не подходят, и тогда приходится разрабатывать составляющие самостоятельно.
Давайте разберем на конкретном примере, что именно делает электроник для робота и от каких проблем он может спасти.
1. Блок питания
Блок питания дает роботу энергию для работы. Если включить все приводы одновременно, блок питания может не справиться с нагрузкой и перегореть. Именно электроник посчитает суммарную потребляемую мощность всех приводов и их схемы управления и спроектирует блок питания с запасом по мощности.
2. Силовые провода — провода, по которым идет высокий ток
Силовые провода могут быть разной толщины (электроники говорят «сечения»). Чем выше ток, который идет по проводу, тем толще провод должен быть. В противном случае есть опасность, что провод будет перегружен, нагреется или даже загорится. Грамотный электроник подберет провода нужного сечения в зависимости от силы тока, который по ним пойдет.
3. Силовая цепь — участок электронной платы, отвечающий за передачу энергии
Силовая цепь получает напряжение от блока питания и распределяет его по всей плате, тем самым запуская работу всех систем. Если неправильно учесть силу тока, протекающего в силовой цепи, плата нагревается. В лучшем случае робот перестанет работать, в худшем — загорятся отдельные компоненты. Электроник необходим, чтобы учесть силу тока при выборе платы и проводников.
4. Условия работы
Иногда получается так, что условия реальной работы не совпадают с теми, для которых проектировали устройство. Это может вызвать явные проблемы — отдельные компоненты выходят из строя, какие-то системы или все устройство перестает работать. Могут возникать и малозаметные проблемы — из-за реакции компонентов на температуру манипулятор перемещается на неверное расстояние. Электроник учтет будущие условия работы при проектировании, а при необходимости — предусмотрит охлаждение элементов или внутреннюю вентиляцию.
Вот еще несколько задач, которые помогают решить электроники:
подобрать величину напряжения и тока на выходе устройства управления двигателями робота, чтобы он мог перемещаться на точное расстояние с заданной скоростью;
выбрать датчики исходя из поставленных задач;
подобрать управляющий микроконтроллер, чтобы обработать информацию, приходящую с датчиков;
выбрать требуемые электродвигатели при проектировании робота.
Инженеры-мехатроники
Даже в век точной электроники роботы, не имей они механических частей, оставались бы просто неподвижным набором деталей. Создателям роботов не обойтись без инженера-мехатроника — специалиста по разработке сложных механизмов.
Если неверно спроектировать механические составляющие робота, на исправление проекта и изготовление новых деталей уйдет немало времени и денег. Давайте посмотрим на примере, какие элементы робота — ответственность мехатроника и как он может сделать робота надежнее.
1. Плечо/звено
С точки зрения механики промышленный манипулятор представляет собой систему балок (плеч, звеньев) и шарниров. Чтобы звено было достаточно длинным или выдерживало большие нагрузки, первое, что приходит в голову, это сделать его потолще, но тогда оно станет слишком тяжелым. Мехатроник рассчитает, из какого материала лучше изготовить звено, какого оно должно быть размера и какая конструкция звена подойдет для решения конкретной задачи.
2. Редуктор
Редуктор уменьшает скорость движущихся частей относительно скорости мотора, чтобы повысить силу тяги устройства (так оно поднимет больший вес и выдержит большую нагрузку). Если тип и характеристики редуктора подобраны неверно, он работает под большой нагрузкой. Грамотный мехатроник подберет редуктор так, чтобы он работал с нужной эффективностью, но при этом не на пределе мощности.
3. Шарнир
Шарнир — это «сустав», он соединяет звенья и позволяет им менять свое положение относительно друг друга. Основной критерий эффективности манипулятора — степень его свободы, то есть то, как он перемещается в пространстве. Если манипулятор может перемещаться только вверх-вниз или вращаться вокруг всего одной оси, степень его свободы невелика, поэтому задач он решает немного. Если нужно, чтобы он перемещался в разных плоскостях и вращался вокруг разных осей — это задача мехатроника. Он же сделает так, чтобы на перемещение уходило как можно меньше времени и энергии.
ПЕРЕЙТИ К ЧЕТВЕРТОМУ МОДУЛЮ
частей робота
Роботы бывают разных форм и размеров. Роботы состоят из ряда компонентов, которые работают вместе: контроллер , манипулятор , концевой эффектор , источник питания , и средство программирования .
Контроллер
Контроллер — это часть робота, которая координирует все движения механической системы.Он также получает входные данные от непосредственного окружения через различные датчики. Сердцем контроллера роботов обычно является микропроцессор, связанный с устройствами ввода / вывода и контроля.
Команды, выдаваемые контроллером, активируют механизм управления движением, состоящий из различных контроллеров, усилителей и исполнительных механизмов. Привод — это двигатель или клапан , который преобразует мощность в движение робота.Это движение инициируется серией инструкций, называемой программой , хранящейся в памяти контроллера.
Контроллер имеет три уровня иерархического управления. Иерархический контроль назначает уровней организации для контроллеров в роботизированной системе. Каждый уровень посылает управляющие сигналы на уровень ниже и сигналов обратной связи сигналов на уровень выше. По мере продвижения к приводу уровни становятся более элементарными.
Инструкции для каждого уровня зависят от уровня, находящегося над ним.
Три уровня:
Level IActuator Control. Самый элементарный уровень, на котором контролируются отдельных перемещений робота по различным плоскостям, таким как оси X, Y и Z.
Уровень IIPath Control. Уровень управления траекторией ( промежуточный ) координирует отдельные перемещения по плоскостям, определенным на уровне I, в желаемую траекторию или путь.
Уровень III Главное управление. Основная функция этого высшего уровня управления — интерпретировать письменные инструкции программиста в отношении требуемых задач. Затем инструкции комбинируются с различными сигналами окружающей среды и переводятся контроллером в более элементарные инструкции, которые может понять Уровень II.
Манипулятор
Манипулятор состоит из сегментов, которые можно соединять и перемещать, позволяя роботу выполнять работу.Манипулятор — это рука робота, которая должна перемещать материалы, детали, инструменты или специальные устройства различными движениями для обеспечения полезной работы.
Манипулятор может быть идентифицирован ed по методу управления, источнику питания, срабатыванию шарнира s и другим факторам. Эти факторы помогают определить лучший тип робота для поставленной задачи. Например, вы не стали бы использовать электрического робота в среде, где существуют горючие пары, а искра может вызвать взрыв.
Манипулятор состоит из серии из сегментов и суставов, очень похожих на те, что встречаются в руке человека. Соединения соединяют два сегмента вместе и позволяют им перемещаться относительно друг друга. Соединения обеспечивают линейное (прямолинейное) или вращательное (круговое) движение.
Мышцы человеческого тела обеспечивают движущую силу, приводящую в движение различные суставы тела. Точно так же робот использует приводы для перемещения руки по запрограммированным траекториям, а затем для удержания суставов жесткими после достижения правильного положения.Приводы обеспечивают два основных типа движения: линейное и вращательное. Линейные приводы обеспечивают перемещение по прямой ; они выдвигают или убирают прикрепленные к ним грузы. Поворотные приводы обеспечивают вращение, перемещая свои нагрузки по дуге или по окружности. Вращательное движение можно преобразовать в линейное движение с помощью ходового винта или других механических средств преобразования.
Эти типы приводов также используются вне робота для перемещения заготовок и обеспечения других видов движения в пределах рабочего диапазона .
Тахометр — устройство, используемое для измерения скорости объекта. В случае роботизированных систем, тахометр используется для контроля ускорения и замедления движений манипуляторов.
Концевой эффектор
Концевой эффектор — это рука робота или инструмент на конце руки робота.Это устройство, прикрепленное к запястью манипулятора с целью захвата, подъема, транспортировки, маневрирования или выполнения операций роботизированной системы. Производительность роботов является прямым результатом того, насколько хорошо концевой эффектор соответствует s требованиям задачи . Область в пределах досягаемости рабочего органа робота называется его рабочей зоной.
Блок питания
Источник питания обеспечивает энергией для привода контроллера и исполнительных механизмов.Он может преобразовывать переменное напряжение в постоянное, необходимое для внутренних цепей роботов , или это может быть насос или компрессор, обеспечивающий гидравлическую или пневматическую энергию. Три основных типа источников питания — электрические, гидравлические и пневматические.
Наиболее распространенным источником энергии , где используются промышленные роботы, является электричество. Вторым по распространенности является сжатый воздух, а наименее распространенным — гидравлический привод.Эти первичные источники энергии должны быть преобразованы в форму и количество, требуемые типом используемого робота. Электронная часть блока управления и любой исполнительный механизм электропривода требует электроэнергии. Роботу с гидравлическими приводами требуется преобразование электроэнергии в гидравлическую энергию с помощью электрического гидравлического насоса с приводом от двигателя. Роботу с пневматическими приводами требуется сжатого воздуха , который обычно подается компрессором с приводом от электродвигателя.
Каковы основные компоненты любого робота? 2. Какая часть контроллера роботов является его сердцем? 3. Что хранится в памяти контроллеров? 4. Сколько уровней управления есть у любого контроллера робота и для чего каждый уровень управления используется? 5. Почему манипулятор и человеческая рука похожи? 6. Как определить лучший тип робота для поставленной задачи? 7. Какое движение обеспечивают поступательные и поворотные приводы? 8. Каковы функции тахометра в случае роботизированных систем? 9.Как называется область в пределах досягаемости конечного эффектора робота? 10. Какие источники энергии используются для управления контроллером и исполнительными механизмами?
Средства программирования
Средство программирования используется для записи движений в память робота. Робот может быть запрограммирован любым из нескольких различных методов. Подвесной пульт обучения , также называемый обучающим блоком или портативным программатором, обучает робота движениям, необходимым для выполнения полезной задачи.Оператор использует подвесной пульт для обучения, чтобы перемещать робота по серии точек, описывающих его желаемый путь. Баллы записываются контроллером для дальнейшего использования.
.
типов роботов — РОБОТЫ: Ваш путеводитель в мир робототехники
Нелегко определить, что такое роботы, и нелегко их распределить по категориям. У каждого робота есть свои уникальные особенности, и в целом роботы сильно различаются по размеру, форме и возможностям. Тем не менее, многие роботы обладают множеством общих функций. Вот 15 категорий, которые мы использовали для классификации роботов.
Аэрокосмическая промышленность: это широкая категория. Он включает в себя всевозможные летающие роботы — например, роботизированную чайку SmartBird и беспилотный летательный аппарат Raven, — но также роботов, которые могут работать в космосе, такие как марсоходы и Робонавт НАСА, гуманоид, который летал на Международную космическую станцию и сейчас является обратно на Землю.
Потребитель: Роботы-потребители — это роботы, которых вы можете покупать и использовать просто для развлечения или для помощи с задачами и домашними делами. Примерами являются робот-собака Aibo, пылесос Roomba, роботы-помощники на базе искусственного интеллекта, а также растущее разнообразие роботизированных игрушек и наборов.
Реагирование на стихийные бедствия: эти роботы выполняют опасную работу, например, ищут выживших после чрезвычайной ситуации. Например, после землетрясения и цунами, обрушившихся на Японию в 2011 году, Packbots использовались для обследования повреждений на атомной электростанции Фукусима-дайити.
Дроны: также называемые беспилотными летательными аппаратами, дроны бывают разных размеров и имеют разные уровни автономности. Примеры включают популярные серии Phantom от DJI и Anafi от Parrot, а также военные системы, такие как Global Hawk, используемые для длительного наблюдения.
Образование: эта широкая категория предназначена для следующего поколения робототехников для использования дома или в классах. Он включает в себя программируемые наборы от Lego, 3D-принтеры с планами уроков и даже роботов-учителей, таких как EMYS.
Развлечения. Эти роботы созданы, чтобы вызывать эмоциональный отклик и заставлять нас смеяться, удивляться или трепетать. Среди них робот-комик РобоТеспиан, роботы из тематического парка Disney, такие как Navi Shaman, и боты с музыкальными наклонностями, такие как Partner.
Экзоскелеты: Роботизированные экзоскелеты могут использоваться для физической реабилитации и для восстановления возможности ходьбы парализованного пациента. Некоторые из них имеют промышленное или военное применение, давая владельцу дополнительную мобильность, выносливость или способность переносить тяжелые грузы.
Гуманоиды: Вероятно, это тот тип роботов, о котором думает большинство людей, когда думают о роботе. Примеры роботов-гуманоидов включают Asimo от Honda, который имеет механический вид, а также андроидов, таких как серия Geminoid, которые созданы, чтобы выглядеть как люди.
Промышленный: традиционный промышленный робот состоит из манипулятора, предназначенного для выполнения повторяющихся задач. Примером может служить Unimate, дедушка всех заводских роботов.В эту категорию входят также такие системы, как складские роботы Amazon и коллективные заводские роботы, которые могут работать вместе с людьми.
Медицина: Медицинские и медицинские роботы включают такие системы, как хирургический робот da Vinci и бионические протезы, а также роботизированные экзоскелеты. Система, которая может соответствовать этой категории, но не является роботом, — это Watson, суперкомпьютер IBM с ответами на вопросы, который используется в приложениях для здравоохранения.
Военные и безопасность: военные роботы включают наземные системы, такие как PackBot от Endeavour Robotics, используемые в Ираке и Афганистане для разведки самодельных взрывных устройств, и BigDog, предназначенные для помощи войскам в переноске тяжелого снаряжения.Роботы-охранники включают автономные мобильные системы, такие как Cobalt.
Исследования: Подавляющее большинство современных роботов рождается в университетах и корпоративных исследовательских лабораториях. Хотя эти роботы могут делать полезные вещи, они в первую очередь предназначены для помощи исследователям в проведении исследований. Таким образом, хотя некоторые роботы могут соответствовать другим описанным здесь категориям, их также можно назвать исследовательскими роботами.
Самоуправляемые автомобили: многие роботы могут ездить сами, и все большее их количество теперь может управлять и .Среди первых беспилотных транспортных средств были построены для соревнований автономных транспортных средств DARPA, а также новаторская беспилотная Toyota Prius от Google, позже образовавшаяся в Waymo.
Дистанционное присутствие: Роботы телеприсутствия позволяют вам присутствовать в каком-либо месте, фактически не посещая его. Вы входите в систему с аватаркой робота через Интернет и водите его, видя то, что он видит, и разговариваете с людьми. Работники могут использовать его для сотрудничества с коллегами в удаленном офисе, а врачи — для проверки пациентов.
Под водой: излюбленное место этих роботов — вода. Они состоят из глубоководных аппаратов, таких как Aquanaut, ныряющих гуманоидов, таких как Ocean One, и систем, основанных на биологических технологиях, таких как змеиный бот ACM-R5H.
Написано Эрико Гуиццо. Дата публикации: 2018-08-01; Дата изменения: 2020-05-28
.Робот
Робот — это механический или виртуальный искусственный агент.
Обычно это электромеханическая система, которая своим внешним видом или движениями дает ощущение наличия у нее собственных намерений или действий.
Слово «робот» может относиться как к физическим, так и к виртуальным программным агентам, но для различения последних обычно называют ботами.
Роботов можно разделить примерно на две категории в зависимости от типа выполняемой ими работы: Работа, которую робот может выполнять лучше человека.
Здесь роботы могут повысить производительность, точность и выносливость.
Задания, которые человек мог бы сделать лучше робота, но по какой-то причине желательно убрать человека.
Здесь роботы освобождают нас от грязных, опасных и скучных задач.
Манипуляции Роботы, которые должны работать в реальном мире, требуют некоторого способа манипулировать объектами; подбирать, изменять, уничтожать или иным образом оказывать влияние.
Таким образом, «руки» робота часто называют концевыми эффекторами, а руку — манипулятором.
Большинство манипуляторов-роботов имеют сменные исполнительные элементы, каждый из которых позволяет им выполнять небольшой круг задач.
У некоторых есть фиксированный манипулятор, который нельзя заменить, в то время как у некоторых есть один манипулятор общего назначения, например рука гуманоида.
Захваты: Распространенным исполнительным элементом является захват.
Обычно он состоит всего из двух пальцев, которые могут открываться и закрываться, чтобы подбирать и отпускать ряд мелких предметов.
Вакуумные захваты: роботы для захвата и установки электронных компонентов и крупных объектов, таких как лобовые стекла автомобилей, часто используют очень простые вакуумные захваты.
Они очень простые, но могут удерживать очень большие грузы и поднимать любой предмет с гладкой поверхностью, чтобы присосаться к нему.
Эффекторы общего назначения: Некоторые продвинутые роботы начинают использовать полностью гуманоидные руки, такие как Рука Тени (справа) или рука Шунка.
Управлять этими очень маневренными манипуляторами с 20 степенями свободы и сотнями тактильных датчиков может быть сложно.
Компьютер должен учитывать большой объем информации и выбирать лучший способ манипулировать объектом из множества возможных.
Передвижение Для простоты у большинства мобильных роботов есть колеса.
Однако некоторые исследователи пытались создать более сложных колесных роботов, имеющих только одно или два колеса.
Двухколесная балансировка: хотя Segway обычно не считается роботом, его можно рассматривать как компонент робота.
Несколько реальных роботов действительно используют подобный алгоритм динамической балансировки, и Робонавт НАСА был установлен на сегвее.
Ballbot: Исследователи из Университета Карнеги-Меллона разработали новый тип мобильного робота, который балансирует на шаре, а не на ногах или колесах.«Ballbot» — это автономный всенаправленный робот с батарейным питанием, который динамически балансирует на единственной металлической сфере с уретановым покрытием.
Он весит 95 фунтов и является приблизительным ростом и шириной человека.
Благодаря своей длинной, тонкой форме и способности маневрировать в ограниченном пространстве, он может работать лучше, чем современные роботы, в среде с людьми.
Ходьба — сложная и динамичная задача.
Было создано несколько роботов, которые могут уверенно ходить на двух ногах, однако еще не создано ни одного робота, который был бы столь же прочен, как человек.
Как правило, эти роботы могут хорошо ходить по ровному полу, иногда могут подниматься по лестнице.
Никто не может ходить по каменистой неровной местности.
.робот | Определение, история, использование, типы и факты
Робот , любая машина с автоматическим приводом, заменяющая человеческие усилия, хотя она может не напоминать людей по внешнему виду или выполнять функции, подобные человеческим. В более широком смысле робототехника — это инженерная дисциплина, связанная с проектированием, конструированием и эксплуатацией роботов.
робот-гуманоид ASIMO, двуногий робот-гуманоид, разработанный компанией Honda Motor Co. American Honda Motor Co., Inc.Концепция искусственных людей предшествовала записанной истории ( см. автомат), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), используемого в словах Карела Чапека. играть руб. (1920). Роботы в пьесе были изготовлены людьми, бездушно эксплуатировавшимися владельцами фабрик, пока не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр в книге Мэри Шелли Frankenstein (1818), или механическими, не уточнялось, но механическая альтернатива вдохновляла поколения изобретателей на создание электрических гуманоидов.
Альфред Абель, Бриджит Хельм и Рудольф Кляйн-Рогге в Метрополис (Слева направо) Альфред Абель, Брижит Хельм и Рудольф Кляйн-Рогге в Метрополис , режиссер Фриц Ланг, 1927. Из частной коллекцииСлово робототехника впервые появилось в научно-фантастическом рассказе Айзека Азимова « Runaround » (1942). Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт достоверности в отношении вероятных трудностей разработки интеллектуальных роботов и технических и социальных проблем, которые могут возникнуть.Обход также содержал знаменитые «Три закона робототехники» Азимова:
- 1. Робот не может причинить вред человеку или своим бездействием позволить человеку причинить вред.
2. Робот должен подчиняться приказам людей, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В статье прослеживается развитие роботов и робототехники.Для получения дополнительной информации о промышленных приложениях, см. статью «Автоматизация».
Britannica Premium: удовлетворение растущих потребностей искателей знаний. Получите 30% подписки сегодня. Подпишись сейчас мехатроника; инженерное дело; robot Узнайте, как мехатроника сочетает в себе знания и навыки из области механики, электротехники и вычислительной техники для создания высокотехнологичных продуктов, например промышленных роботов. © Университет Ньюкасла, факультет инженерии и искусственной среды с благодарностью Джереми Лей и Нику Паркеру из Light Creative (издательский партнер Britannica) См. Все видео к этой статьеХотя и не гуманоид по форме, машины с гибким поведением и Для промышленности было разработано несколько человекоподобных физических атрибутов.Первым стационарным промышленным роботом был программируемый Unimate, гидравлический подъемный рычаг с электронным управлением, который мог повторять произвольные последовательности движений. Он был изобретен в 1954 году американским инженером Джорджем Деволом и разработан Unimation Inc., компанией, основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире производственного робота; у него была неприятная задача (для людей) извлекать и складывать горячие металлические детали из машины для литья под давлением.Оружие Unimate по-прежнему разрабатывается и продается лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
промышленный робот Промышленный робот на заводе. © Index Open Посмотрите, как использование роботизированного конвейера для бактериальной генетики делает задачу ученого менее сложной и эффективной по времени в Университетском колледже Корка «Роботизированный конвейер», используемый в бактериальной генетике в Университетском колледже Корка, Корк, Ирландия . Университетский колледж Корк, Ирландия (издательский партнер Britannica) Посмотреть все видеоролики к этой статьеБолее совершенные электрические руки с компьютерным управлением, управляемые датчиками, были разработаны в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и в Стэнфорде. Университет, где они использовались с камерами в роботизированных исследованиях рук и глаз.Виктор Шейнман из Стэнфорда, работавший с Unimation для GM, спроектировал первый такой рычаг, используемый в промышленности. Названные PUMA (Программируемая универсальная машина для сборки), они используются с 1978 года для сборки таких автомобильных компонентов, как панели приборов и фары. PUMA широко подражали, и ее потомки, большие и малые, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов стрелковое электрическое оружие стало важным в лабораториях молекулярной биологии, точно обрабатывая массивы пробирок и пипетируя сложные последовательности реагентов.
Мобильные промышленные роботы также впервые появились в 1954 году. В том же году электрическая тележка без водителя, произведенная Barrett Electronics Corporation, начала возить грузы по продуктовому складу в Южной Каролине. Такие машины, получившие название AGV (Автомобили с автоматическим управлением), обычно перемещаются по сигнальным проводам, закрепленным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые позволяли выполнять более сложные действия, чем те, которые обеспечивались простым электронным управлением. В 1990-х годах новый метод навигации стал популярным для использования на складах: AGV, оснащенные сканирующим лазером, определяют свое положение путем триангуляции путем измерения отражений от фиксированных светоотражателей (по крайней мере, три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в Соединенных Штатах, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и закрыта несколько лет спустя. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлического оружия, в 1990 году продала свое подразделение робототехники шведской фирме Asea Brown Boveri Ltd. Adept Technology, Inc., выделившейся из Стэнфорда и Unimation для производства электрического оружия, является единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, а в 1980-х годах другие компании в Японии и Европе начали активно выходить на рынок.Перспектива старения населения и связанная с этим нехватка рабочих побудила японских производителей экспериментировать с передовой автоматизацией еще до того, как она дала явную отдачу, открыв рынок для производителей роботов. К концу 1980-х Япония, возглавляемая робототехническими подразделениями Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокие затраты на рабочую силу в Европе также стимулировали внедрение роботов-заменителей: количество промышленных роботов в Европейском союзе впервые превысило количество японских в 2001 году.
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов (созданных для работы в офисных и домашних условиях). С другой стороны, игрушечные роботы могут развлекаться, не выполняя задачи очень надежно, а механические разновидности существовали тысячи лет. ( См. Автомат ). В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-е распознавали голоса и слова.В 1999 году корпорация Sony представила собачьего робота по имени AIBO с двумя дюжинами двигателей для активации его ног, головы и хвоста, двумя микрофонами и цветной камерой, управление которыми осуществляет мощный микропроцессор. Более реалистичные, чем что-либо прежде, AIBO гнались за разноцветными мячами и научились узнавать своих владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первые 5000 билетов были распроданы через Интернет.
развлекательный робот развлекательный робот AIBO, модель ERS-111. Предоставлено Sony Electronics Inc. .