Китай Высококачественный гармонический редуктор производителей, поставщиков, фабрика
Гармонический Драйв
Как профессиональный производитель Harmonic Drive, гармоническая коробка передач GIGAGER широко используется в роботизированных соединениях с особенностями компактного дизайна, легкого веса, высокого крутящего момента, хорошего качества по конкурентоспособной цене. GIGAGER поставляет полный ассортимент высокопроизводительных гармонических редукторов с высокими эксплуатационными характеристиками, которые соответствуют японским и американским редукторам гармоник. Это идеальные альтернативные гармонические редукторы для вашего ограниченного бюджета.
1. Что такое редуктор Harmonic Drive?
Гармоническая зубчатая передача была изобретена американским изобретателем CWMusser в 1955 году. Это новый тип трансмиссии, который использует упругую деформацию гибкого рабочего элемента в движение или передачу мощности. Он пробивает механическую трансмиссию с помощью жестких элементов. Модель механизма использует гибкий элемент для достижения механической трансмиссии, что приводит к ряду особенностей, которые трудно реализовать с другими трансмиссиями. Процесс деформации промежуточного гибкого элемента в основном представляет собой симметричную гармонику. В дополнение к тому, что в бывшем Советском Союзе этот тип трансмиссии упоминался как волновой или гибкий привод, США, Великобритания, Германия, Япония и другие страны называются Гармонической трансмиссией.
Он пробивает механическую трансмиссию с помощью жестких элементов. Модель механизма использует гибкий элемент для достижения механической трансмиссии, что приводит к ряду особенностей, которые трудно реализовать с другими трансмиссиями. Процесс деформации промежуточного гибкого элемента в основном представляет собой симметричную гармонику. В дополнение к тому, что в бывшем Советском Союзе этот тип трансмиссии упоминался как волновой или гибкий привод, США, Великобритания, Германия, Япония и другие страны называются Гармонической трансмиссией.
2. Каковы особенности продукта GIGAGER Harmonic Drive?
• Высокая прочность flexspline делает использование гармонического привода GIGAGER длительным сроком службы.
• Высокий крутящий момент обеспечивает выдающуюся гармоническую зубчатую передачу GIGAGER.
• Низкий люфт гармонического зубчатого колеса, отвечающий требованиям прецизионных приложений.
• Высокая жесткость гармонического привода GIGAGER в основном удовлетворяет наших пользователей.
• Высокая производительность обеспечивает плавную работу приложения робота пользователя.
• Ультраплоская конструкция позволяет гармонической коробке передач GIGAGER соответствовать требованиям пользователя по экономии места для применения роботизированных соединений.
• Гармоничные редукторы с полым валом доступны для различных потребностей пользователей.
• Высокая стоимость делает идеальные альтернативные гармонические редукторы скорости для вашего ограниченного бюджета
3. Конфигурация системы привода SV Harmonic Drive.
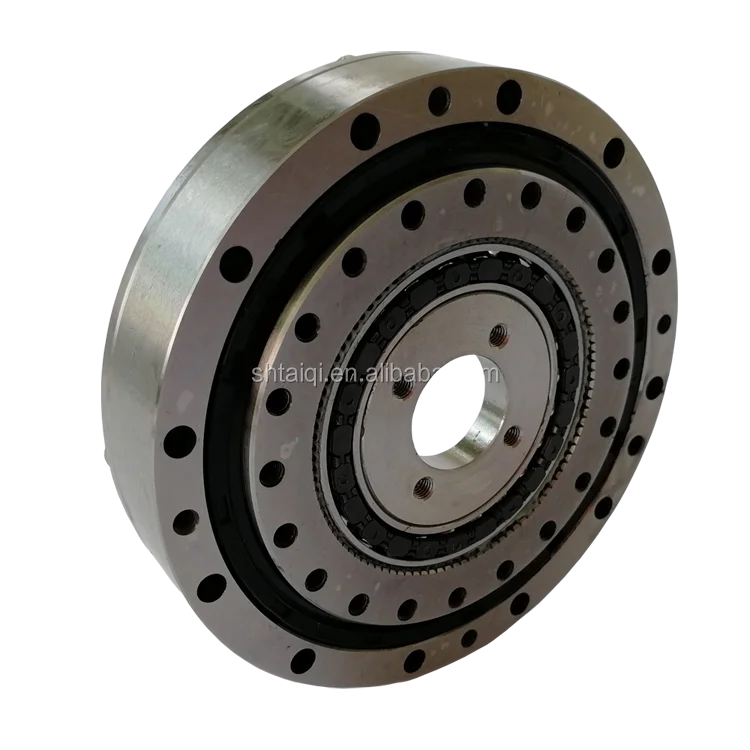
Гармонический привод состоит из трех основных частей: кругового сплайна, гибкого сплайна и волнового генератора.
Компонент Гармонического Привода | |
Генератор волн | Генератор волн представляет собой тонкий шарикоподшипник, установленный на эллиптической втулке. |
Flexspline | Это нежесткая, тонкая цилиндрическая чашка с наружными зубцами на открытом конце чашки. Он помещается поверх генератора волн и принимает свою эллиптическую форму. Flexspline, как правило, используется в качестве выходного механизма. |
Круговой сплайн | Он имеет на два зуба больше, чем Flexspline, и, как правило, устанавливается на корпус. |
 Это служит высокоэффективным гидротрансформатором и обычно устанавливается на входной вал или вал двигателя.
Это служит высокоэффективным гидротрансформатором и обычно устанавливается на входной вал или вал двигателя.4. Как работает коробка передач Harmonic Drive?
Принцип подавления гармонических зубчатых колес GIGAGER заключается в использовании относительного движения Flexspline, кругового сплайна и генератора волн, главным образом управляемой упругой деформации flexspline, для реализации движения и передачи мощности. Эллиптический кулачок в волновом генераторе вращается в гибком колесе, чтобы деформировать гибкую шпонку. Когда зубья Flexspline и зубья кругового сплайна входят и сцепляются друг с другом, которые находятся на концах длинной оси эллиптического кулачка генератора волны, зубья Flexspline на коротких концах оси отсоединяются от зубьев стального колеса. Для зубьев между длинной осью и короткой осью генератора волны полусцепление, которое постепенно входит в зацепление по разным участкам двух ступеней гибкого сплайна и кругового сплайна, называется кусанием. Он находится в состоянии постепенного отказа от участия, что называется разъединением. Когда генератор волн вращается непрерывно, гибкая шпонка постоянно деформируется, так что зубья двух колес постоянно меняют свое исходное рабочее состояние во время четырех движений зацепления, прикусывания, зацепления и расцепления, генерирования колебательного движения зуба и реализации передачи движения. от генератора волн до гибкого сплайна.
Когда зубья Flexspline и зубья кругового сплайна входят и сцепляются друг с другом, которые находятся на концах длинной оси эллиптического кулачка генератора волны, зубья Flexspline на коротких концах оси отсоединяются от зубьев стального колеса. Для зубьев между длинной осью и короткой осью генератора волны полусцепление, которое постепенно входит в зацепление по разным участкам двух ступеней гибкого сплайна и кругового сплайна, называется кусанием. Он находится в состоянии постепенного отказа от участия, что называется разъединением. Когда генератор волн вращается непрерывно, гибкая шпонка постоянно деформируется, так что зубья двух колес постоянно меняют свое исходное рабочее состояние во время четырех движений зацепления, прикусывания, зацепления и расцепления, генерирования колебательного движения зуба и реализации передачи движения. от генератора волн до гибкого сплайна.
5. Сколько моделей доступно?
Серии | Тип | спекуляция | Передаточное число | |||||
SHF | пустой (Стандарт) T (плоский) H (полый) S (Вал) | 14 | 30 | 50 | 80 | 100 | — | — |
17 | 30 | 50 | 80 | 100 | — | — | ||
20 | 30 | 50 | 80 | 100 | 120 | — | ||
25 | 30 | 50 | 80 | 100 | 120 | 160 | ||
32 | 50 | 80 | 100 | 120 | — | — | ||
CSF | пустой (Стандарт) T (плоский) | 14 | 30 | 50 | 80 | 100 | — | — |
17 | 30 | 50 | 80 | 100 | — | — | ||
20 | 30 | 50 | 80 | 100 | 120 | — | ||
25 | 30 | 50 | 80 | 100 | 120 | 160 | ||
32 | 50 | 80 | 100 | 120 | — | — | ||
SHD | H (полый) | 14 | 50 | 100 | — | — | — | — |
17 | 50 | 100 | — | — | — | — | ||
CSD | ||||||||
20 | 50 | 100 | 120 | — | — | — | ||
Для более подробной информации, пожалуйста, обратитесь к приложенному каталогу. (скачать PDF на этой странице)
(скачать PDF на этой странице)
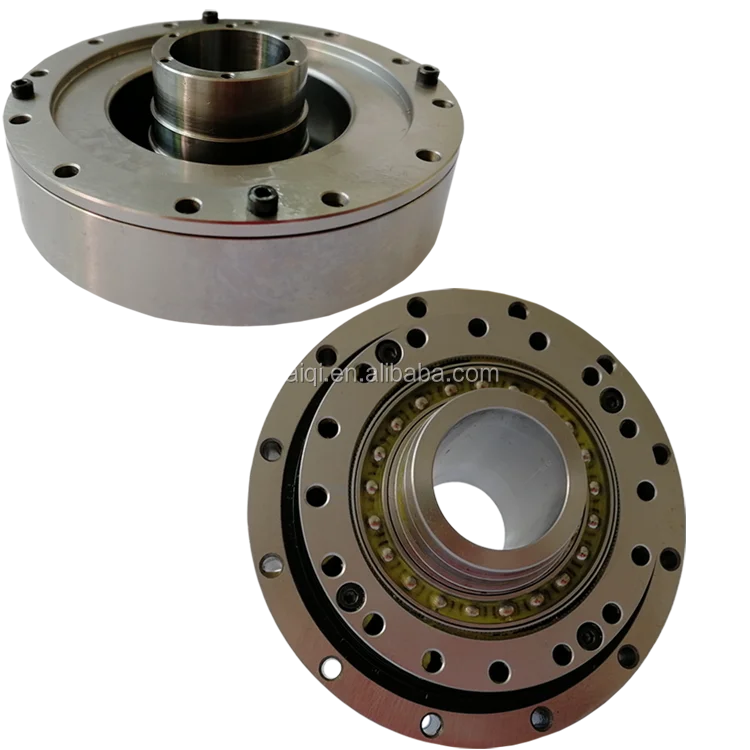
Сравнение фото GIGAGER Harmonic Drive Reducer
Нет . | модель | Фото |
1 | ШФ-14 ШФ-17 SHF-20 ШФ-25 SHF-32 | |
2 | СВЧ-Т-14 СВЧ-Т-17 СВЧ-Т-20 СВЧ-Т-25 СВЧ-Т-32 | |
3 | СВЧ-Н-14 СВЧ-Н-17 СВЧ-Н-20 СВЧ-Н-25 СВЧ-Н-32 | |
4 | SHF-S-14 SHF-S-17 SHF-S-20 SHF-S-25 SHF-S-32 | |
5 | CSF-14 CSF-17 CSF-20 CSF-25 CSF-32 | |
6 | CSF-Т-14 CSF-Т-17 CSF-Т-20 CSF-Т-25 CSF-Т-32 | |
7 | SHD-Н-14 SHD-Н-17 SHD-Н-20 | |
8 | КУР-Н-14 КУР-Н-17 КУР-Н-20 |
6. Почему стоит выбрать GIGAGER?
Почему стоит выбрать GIGAGER?
7. FAQ
горячая этикетка : редуктор гармонический, Китай, производители, поставщики, завод, высокое качество
Волновые (гармонические) редукторы, Редукторы Harmonic Drive,Wave gear,Волновые редукторы Сервосила
|
|

Волновые редукторы Harmonic Drive | Публикации
Важным компонентом современных высокоточных электромеханических систем являются редукторы. Одним из самых распространённых типов высокоточных редукторов являются волновые редукторы, впервые выведенные на рынок компанией Harmonic Drive более 45 лет назад. За прошедшее время ассортимент продукции в каталоге компании многократно увеличился, и разобраться в различиях многочисленных серий редукторов может оказаться непросто. Предлагаемая статья попробует в этом помочь.
Принцип действия
В состав волновой зубчатой передачи классической конструкции входят три основных элемента: генератор волны, гибкое кольцо и жёсткое кольцо. С точки зрения конструкции, генератор волны — это тонкостенный шарикоподшипник, напрессованный на эллиптическую втулку. Гибкое кольцо — это тонкостенное зубчатое колесо с внешним зубом. Когда при сборке генератор волны устанавливается внутрь гибкого кольца, то последнее деформируется и принимает форму генератора волны. Жёсткое кольцо представляет собой зубчатое кольцо с внутренним зубом. Количество зубьев жёсткого кольца обычно на 2 меньше чем у гибкого кольца (несколько реже делают разницу в 4 зуба). При сборке волнового редуктора гибкое кольцо, установленное на генератор волны, помещается внутрь жёсткого кольца. Зубья жёсткого кольца и гибкого кольца входят в зацепление в двух зонах, которые располагаются на большой полуоси генератора волны (который имеет форму эллипса).
С точки зрения конструкции, генератор волны — это тонкостенный шарикоподшипник, напрессованный на эллиптическую втулку. Гибкое кольцо — это тонкостенное зубчатое колесо с внешним зубом. Когда при сборке генератор волны устанавливается внутрь гибкого кольца, то последнее деформируется и принимает форму генератора волны. Жёсткое кольцо представляет собой зубчатое кольцо с внутренним зубом. Количество зубьев жёсткого кольца обычно на 2 меньше чем у гибкого кольца (несколько реже делают разницу в 4 зуба). При сборке волнового редуктора гибкое кольцо, установленное на генератор волны, помещается внутрь жёсткого кольца. Зубья жёсткого кольца и гибкого кольца входят в зацепление в двух зонах, которые располагаются на большой полуоси генератора волны (который имеет форму эллипса).
Когда генератор волны поворачивается, то по мере его поворота зоны зацепления зубьев смещаются по окружности жёсткого кольца. Благодаря тому, что количество зубьев на гибком и жёстком кольце различно, после того как генератор волны поворачивается на 360°, жёсткое кольцо оказывается смещено относительно жёсткого, при этом величина смещения соответствует разнице в числе зубьев этих колёс. Если при этом жёсткое кольцо неподвижно, то при быстром вращении генератора волны получаем медленное вращение гибкого кольца. Устройство в этом случае является понижающим редуктором: генератор волны является входом, гибкое кольцо — выходом, а жёсткое кольцо является корпусом.
Если при этом жёсткое кольцо неподвижно, то при быстром вращении генератора волны получаем медленное вращение гибкого кольца. Устройство в этом случае является понижающим редуктором: генератор волны является входом, гибкое кольцо — выходом, а жёсткое кольцо является корпусом.
Если изменять элементы волнового редуктора, используемые в качестве входного и выходного элемента, то устройство можно будет использовать в качестве повышающего редуктора, или например, поменять направление вращения выхода относительно входа. Третий элемент волнового редуктора не обязательно должен оставаться неподвижным. Если он также приводится во вращение, то устройство работает в качестве дифференциального редуктора.
Специфика конструкции волнового редуктора обеспечивает отсутствие люфта, что позволяет им находить применение в различных областях техники, требующих точной передачи вращения. Широкое применение волновых редукторов влечёт за собой очень различные требования к конструкции, что воплощается в широкий ассортимент редукторов в каталоге Harmonic Drive.
Конструкция редукторов: варианты
По конструкции все поставляемые волновые редукторы можно разделить на несколько групп. Самые простые по конструкции редукторы — это установочные комплекты. Они представляют собой три основных детали редуктора, пригнанные друг к другу, но не собранные в единое изделие. Подшипники в такой комплектации отсутствуют и при интеграции такого редуктора в конечное изделие можно установить именно те подшипники, которые наиболее подходят для конкретного применения. Такая возможность может дать преимущество в случае, когда подшипники стандартных готовых редукторов не устраивают по тем или иным параметрам. Вал в такой комплектации также отсутствует (ни полого, ни сплошного вала просто нет). Некоторые серии установочных комплектов снабжаются кулачково-дисковой муфтой на генераторе волны для компенсации несоосности вала. Легко видеть, что такая конструкция даёт большую гибкость в проектировании конечной системы и позволяет оптимально состыковать волновой редуктор с остальной частью системы.
Вторая группа по конструктивному исполнению — редукторы в исполнении модуль. Эти редукторы представляют собой полностью собранные изделия с установленными подшипниками, дополнительными корпусными деталями и часто с установленным валом — полым или сплошным. Несмотря на то, что полностью собранные изделия не дают такой же гибкости в построении системы, как и установочные комплекты, использование их упрощает конструирование за счёт отсутствия необходимости установки подшипников и вала. Ещё одна особенность этого конструктивного исполнения — отсутствие сплошного наружного корпуса у редуктора.
Третья группа по конструктивному исполнению — корпусированные редукторы. Они, так же как и модули, представляют собой полностью собранные изделия, однако в отличие от них имеют наружный корпус. Корпусные редукторы всегда снабжаются подшипниками, входным и часто входным валом. Полый вал в таких редукторах в настоящее время отсутствует.
Вопрос о полом вале
Ещё один важный конструктивная особенность, важная во многих практических применениях, по которой можно провести различие между различными сериями редукторов — это наличие полого вала. Самый простой случай — полый вал уже есть (см. например чертёж редуктора из серии HFUS-2UH на рис. 1, полый вал выделен цветом). Полый вал здесь уже реализован как отдельный конструктивный элемент в стандартном каталожном исполнении редуктора. Второй случай относится к тем редукторам где полого вала нет — не предусмотрен в конструкции. Пример такой конструкции — редуктор серии CSD-2UH (см. рис. 2, выделено цветом).
Самый простой случай — полый вал уже есть (см. например чертёж редуктора из серии HFUS-2UH на рис. 1, полый вал выделен цветом). Полый вал здесь уже реализован как отдельный конструктивный элемент в стандартном каталожном исполнении редуктора. Второй случай относится к тем редукторам где полого вала нет — не предусмотрен в конструкции. Пример такой конструкции — редуктор серии CSD-2UH (см. рис. 2, выделено цветом).
| Рис. 1 Пример волнового редуктора с полым валом | Рис. 2 Пример волнового редуктора без полого вала |
Третий вариант конструкции — полый вал не установлен, но имеется сквозное отверстие, позволяющее это сделать без дополнительных модификаций редуктора. Пример — редуктор SHD-2UH (см. рис. 3). На ряде серий редукторов полый вал отсутствует, и на генератор волны установлена кулачково-дисковая муфта с втулкой со шпоночным пазом для установки на вал двигателя со шпонкой. Примером может служить CobaltLine-2UH (см. рис. 4). В таких редукторах полый вал установить можно только при наличии заказной модификации редуктора без входных элементов на генераторе волны (снимаются муфта и втулка).
Примером может служить CobaltLine-2UH (см. рис. 4). В таких редукторах полый вал установить можно только при наличии заказной модификации редуктора без входных элементов на генераторе волны (снимаются муфта и втулка).
| Рис. 3 Пример волнового редуктора с возможностью установить полый вал | Рис. 4 Пример волнового редуктора, где требуется доработка для установки полого вала |
Основные серии установочных комплектов
В каталоге Harmonic Drive в настоящее время представлено шесть серий редукторов в исполнении установочный комплект. Все эти серии отличаются по параметрам и в частности по производительности. Можно выделить группу серий с базовой производительностью: HFUC-2A, HFUS-2A и CPL-2A. Серия HFUC представлена в самом широком диапазоне габаритов (типоразмеров): от 8 до 100, в части прочих параметров она занимает среднее положение. Гибкое кольцо выполнено в классической форме «кастрюля». Серия HFUS имеет несколько иную конструкцию: гибкое кольцо выполнено в форме «шляпа», что даёт больше пространства внутри редуктора. С другой стороны, по этой причине наружный диаметр и масса редукторов HFUS-2A несколько увеличились по сравнению с аналогичными редукторами HFUC-2A. Серия установочных комплектов CPL-2A была разработана для применения в авиационных и космических системах, где требуется минимальные размеры и масса. При разработке была проведена оптимизация конструкции, благодаря чему масса и длина редуктора были уменьшены, и при этом удалось сохранить на прежнем уровне номинальный момент.
С другой стороны, по этой причине наружный диаметр и масса редукторов HFUS-2A несколько увеличились по сравнению с аналогичными редукторами HFUC-2A. Серия установочных комплектов CPL-2A была разработана для применения в авиационных и космических системах, где требуется минимальные размеры и масса. При разработке была проведена оптимизация конструкции, благодаря чему масса и длина редуктора были уменьшены, и при этом удалось сохранить на прежнем уровне номинальный момент.
Ещё одна группа серий характеризуется увеличенной производительностью: номинальный момент у них выше, чем у серий с базовой производительностью. К таким сериям относятся CSG-2A и CobaltLine-2A. Обе серии кроме увеличенного номинального момента (примерно на 30%) имеют также значительно (на 40%) увеличенный срок службы по сравнению с сериями базовой производительности. По остальным параметрам и по конструкции эти две серии одинаковы, различие состоит в месте производства: CSG-2A на заводе в Японии, CobaltLine-2A — на заводе в Германии.
Кроме двух перечисленных выше, есть ещё одна группа редукторов, отличающихся пониженной производительностью для тех же типоразмеров. В настоящее время к этой группе относится только одна серия: CSD-2A. Эта серия имеет пониженную массу (на 40% по сравнению с HFUC) и значительно сниженную осевую длину (на 50%). Легко видеть, что по длине эта серия даже более компактна, чем CPL-2A (у последней длина короче, чем у HFUC, всего на 10%), однако за это приходится расплачиваться более низкой производительностью.
Поскольку установочные комплекты содержат в себе необходимый минимум компонентов с тем, чтобы все остальные детали добавлялись при интеграции редуктора в конструкцию конечного изделия, то полый вал как элемент конструкции также отсутствует. Он может быть установлен непосредственно в конечном изделии, если это необходимо. Кроме того, необходимо отметить что установочные комплекты поставляются.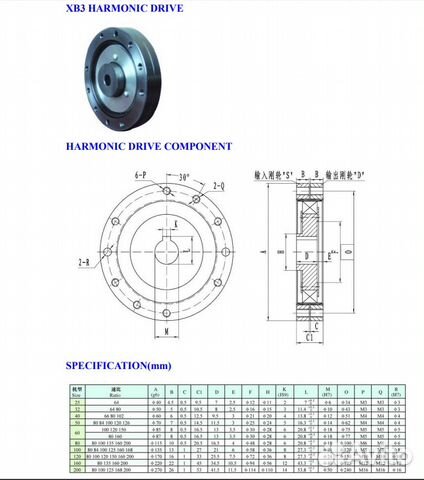
Основные серии модулей
Ассортимент волновых редукторов в исполнении модуль, выпускаемых компанией Harmonic Drive существенно более широк, чем установочных комплектов. Они также как и установочные комплекты могут быть разделены на несколько групп по производительности, а также по наличию или отсутствию полого вала.
Среди волновых редукторов в исполнении модуль полый вал отсутствует в 10 сериях (2 серии со входным валом, 1 серия без отверстия в центре редуктора и остальные со входным элементом под вал со шпонкой). Из них четыре серии относятся к группе базовой производительности. Серия HFUC-2UH здесь тоже выступает в роли базовой серии со средним уровнем параметров и самым широким диапазоном габаритов. Серия HFUS-2SO отличается формой генератора волны («шляпа») и уменьшенной осевой длиной. Серии CPU-S и CPU-M отличаются входным элементом — входной вал и втулка со шпоночным пазом для установки на двигатель соответственно. Кроме того они имеют расширенный диапазон температур и массу увеличенную по сравнению с HFUC-2UH.
Кроме того они имеют расширенный диапазон температур и массу увеличенную по сравнению с HFUC-2UH.
К редукторам увеличенной производительности среди серий в исполнении модуль без полого вала можно отнести пять серий: SHG-2SO, CSG-2UH, CobaltLine-2UH, CobaltLine-CPS и CobaltLine-CPM. Все представители этой группы серий имеют увеличенный на 30% номинальный момент и срок службы увеличенный на 40% по сравнению с сериями базовой производительности. Серия SHG-2SO при этом является развитием серии редукторов HFUS-2SO: размеры редукторов одинаковы, отличаются только момент и срок службы. Аналогичная ситуация и с редукторами CSG-2UH и HFUC-2UH: разница в конструкции и размерах минимальна. Серия CobaltLine-2UH имеет по сравнению с CSG-2UH расширенный диапазон рабочих температур. CobaltLine-CPM и CobaltLine-CPSпредставляют собой варианты для непосредственной установки на двигатель и с входным валом.
К группе серий с пониженной производительностью среди модулей без полого вала относится только одна серия — CSD-2UH. Эта серия наряду с меньшим на 30% номинальным моментом, имеет меньший диаметр, меньшую осевую длину и массу, чем HFUC-2UH.
Рис. 7 CSD-2UHСреди волновых редукторов в исполнении модуль есть группа серий с полым валом (или с возможностью его легко установить). Из имеющихся в каталоге десяти серий подобных редукторов, полый вал физически установлен в 6 сериях и ещё в двух есть возможность его установки без дополнительных модификаций. Из этих серий три — HFUS-2UH, HFUS-2SH и CPU-H можно отнести к группе изделий со средней производительностью. Обе упомянутые серии редукторов HFUS имеют низкую входную скорость (на 70% ниже) и высокую массу (до 60%), чем например у HFUC-2UH. При этом HFUS-2SH имеет более короткую конструкцию. Серия редукторов CPU-H имеет усиленные подшипники и расширенный диапазон рабочих температур, и также пониженную входную скорость.
Три серии редукторов в исполнении модуль с полым валом можно отнести к группе серий повышенной производительности: SHG-2SH, SHG-2UH и CobaltLine-CPH. Первые две серии являются развитием HFUS-2SH и HFUS-2UH соответственно с увеличенным на 30% номинальным моментом и сроком службы, увеличенным на 40%. Аналогичным образом, CobaltLine-CPH является улучшенной версией редуктора CPU-H с увеличенным номинальным моментом и сроком службы.
Две серии редукторов в исполнении модуль с полым валом имеют пониженную производительность. Это серии SHD-2SH и CSD-2UF. По сравнению с сериями стандартной производительности, они имеют укороченную конструкцию и номинальный момент, сниженный на 30%. Редукторы серии SHD-2SH кроме того имеет массу меньше чем CSD-2UF.
Рис. 8 SHD-2SHКорпусные малогабаритные редукторы
В отдельную группу изделий можно выделить волновые редукторы, заключённые в сплошной наружный корпус. Сейчас в каталоге представлено две серии редукторов в таком исполнении: PMG и CSF-mini.Обе серии выпускаются в виде малогабаритных редукторов: габарит не превосходит 14, в то время как установочные комплекты и модули в подавляющем большинстве выпускаются в более крупных габаритах (14 и выше).
Сейчас в каталоге представлено две серии редукторов в таком исполнении: PMG и CSF-mini.Обе серии выпускаются в виде малогабаритных редукторов: габарит не превосходит 14, в то время как установочные комплекты и модули в подавляющем большинстве выпускаются в более крупных габаритах (14 и выше).
| Рис. 9 CSF-1U Single | Рис. 10 CSF-2XH-F Single |
Серия PMG выпускается в двух вариантах: PMG-M для установки на двигатель и PMG-S со входным валом. На выходе в обоих случаях установлен вал. СерияCSF-mini имеет 6 различных вариантов, отличающихся видом входного и выходного элемента, а также крепёжного фланца: выходной вал или фланец, входной вал или втулка под вал со шпонкой, а также широкий или узкий крепёжный фланец.
Основные параметры волновых редукторов
Разбираясь в различиях между разными сериями редукторов, мы неминуемо сталкиваемся с их параметрами. С одной стороны эти параметры могут показаться очевидными, с другой стороны, различные производители имеют несколько различный подход к назначению параметров своих изделий, поэтому далее приводится обзор основных параметров волновых редукторов.
С одной стороны эти параметры могут показаться очевидными, с другой стороны, различные производители имеют несколько различный подход к назначению параметров своих изделий, поэтому далее приводится обзор основных параметров волновых редукторов.
Габарит (типоразмер) — число, позволяющее отличить большие редукторы от маленьких в рамках одной серии. Для волновых редукторов Harmonic Drive это число соответствует диаметру гибкого кольца выраженному в десятых долях дюйма. По этой причине число характеризующее габарит редуктора тесно связано с моментом, который может развить редуктор (гораздо теснее чем в случаях, когда число, характеризующее габарит привязано к какому-нибудь из наружных размеров редуктора или к габаритному размеру). Неудивительно, что многие серии редукторов имеют не просто похожую производительность, а точно совпадающие величины моментов для одинаковых габаритов.
Передаточное число (редукция) — определяет соотношение входной и выходной скорости. Значение в каталоге приводится для следующего варианта установки редуктора: генератор волны — вход, гибкое кольцо — выход, жёсткое кольцо — неподвижно. Практически доступный диапазон передаточных чисел ограничен значениями от 30 до 160.
Значение в каталоге приводится для следующего варианта установки редуктора: генератор волны — вход, гибкое кольцо — выход, жёсткое кольцо — неподвижно. Практически доступный диапазон передаточных чисел ограничен значениями от 30 до 160.
Производительность редуктора определяется моментом и скоростью, с которыми он может работать. Для волновых редукторов Harmonic Drive в каталоге указывает четыре различных момента. Максимальный повторяющийся пиковый момент — указывает на предельные значения динамических нагрузок, максимально допустимые в рабочем цикле. Средний допустимый момент — определяет предельные значения момента нагрузки допустимые в продолжительном режиме работы. Номинальный момент — используется при расчётах срока службы редуктора, и не применяется как характеристика производительности редуктора. Кратковременный импульсный момент — момент который может прикладываться к редуктору при аварийном торможении на протяжении очень короткого времени. Приложение к редуктору такого момента допустимо всего несколько раз за весь срок службы. (Легко видеть, что средний допустимый момент наиболее близок к номинальному моменту в нашем традиционном понимании).
(Легко видеть, что средний допустимый момент наиболее близок к номинальному моменту в нашем традиционном понимании).
Скорость, которую может развивать редуктор характеризуется двумя параметрами: для работы при различной смазке: при жидкой и при консистентной. Значения скорости приводятся на входе редуктора. Максимальная скорость указывает на предельно допустимое значение скорости в кратковременных режимах работы. Средняя входная скорость — есть предельно допустимое значение скорости в продолжительном режиме работы. Оба параметра имеют разные значения для работы при различной смазке: более высокие при жидкой смазке и более низкие при консистентной смазке. Необходимо отметить что редуктор с консистентной смазкой — это стандартное каталожное решение, которое не требует принятия дополнительных конструкторских мер, в то время как редуктор с жидкой смазкой — это дополнительная возможность, лежащая за пределами стандартных решений и здесь потребуется создание резервуара для смазки (как минимум).
Диапазон рабочих температур — определяется главным образом смазкой и по этой причине не указывается для редукторов в исполнении установочный комплект — они поставляются без рабочей смазки.
Вместо заключения
Волновые редукторы Harmonic Drive представлены очень широким ассортиментом различных версий и вариантов исполнений, которые могут применяться в самых различных системах и технических устройствах, требующих компактные и точные решения.
определение, описание, разновидности и принцип работы
Волновыми называют механические передачи, содержащие контактирующие между собой гибкое и жесткое звенья и обеспечивающие передачу и преобразование движения путем деформирования гибкого звена. Волновые передачи бывают фрикционные, зубчатые и винтовые.
Принцип передачи и преобразования движения путем волнового деформирования одного из звеньев механизма впервые предложен в 1947 г. инженером А. И. Москвитиным.
На рис. 9.3 представлены две схемы фрикционного варианта волновой передачи, состоящей из жесткого колеса b,
9.3 представлены две схемы фрикционного варианта волновой передачи, состоящей из жесткого колеса b,
гибкого колеса
g
и роликового генератора волн
h,
причем наружный диаметр недеформированного гибкого колеса несколько меньше внутреннего диаметра жесткого колеса; охватывающий размер по роликам сделан таким, чтобы деформированное гибкое колесо было прижато роликами к жесткому колесу. В схеме а с ведомым валом соединено жесткое колесо, а в схеме
б
— гибкое.
Если обкатка гибкого колеса по жесткому происходит без проскальзывания, то за один оборот генератора ведомое звено повернется на угол, соответствующий разности длин окружностей контактирующих поверхностей жесткого и гибкого колеса, следовательно, передаточное число будет равно отношению длины окружности ведомого звена к разности длин окружностей колес (отношение длин окружностей в дальнейшем заменим отношением диаметров). У волновой передачи по схеме, а
рис. 9.3 направления вращения ведущего и ведомого звеньев совпадают, по схеме
9.3 направления вращения ведущего и ведомого звеньев совпадают, по схеме
б
— противоположны.
У зубчатых волновых передач гибкие колеса имеют наружные, а жесткие колеса — внутренние зубья. В настоящее время такие передачи имеют основное распространение.
Достоинства волновых зубчатых передач заключаются в возможности получения значительных передаточных чисел, небольшой массе и габаритах конструкции, высокой кинематической точности передачи, являющейся результатом многопарного зацепления зубьев. Волновые зубчатые передачи долговечны и имеют более низкий уровень шума по сравнению с обычными зубчатыми передачами.
К недостаткам волновых зубчатых передач следует отнести сложную технологию изготовления деталей и отсутствие конструкций, у которых оси пересекаются или скрещиваются.
Волновые передачи в наше время начинают применять в станкостроении, подъемно-транспортных машинах, химическом машиностроении, авиационной и ракетной технике, промышленных роботах и др.
Передаточное отношение.В волновой фрикционной передаче передаточное отношение зависит от разности диаметров жесткого и гибкого колес и равно отношению диаметра ведомого колеса к разности диаметров колес. Заменяя отношение диаметров колес отношением чисел их зубьев, получим передаточное отношение и
для волновой зубчатой передачи: при ведомом жестком колесе
при ведомом гибком колесе
Волновой редуктор: принцип работы, устройство, назначение
С момента создания первой зубчатой передачи прошло много лет. Многие известные инженеры приложили немало усилий для усовершенствования этого процесса и изобретения новых механизмов. Одним из таких людей стал американский инженер У. Массер, который в 1959 году изобрел волновой редуктор. Принцип работы был основан на использовании гибкого зубчатого колеса, передающего движение другой шестерне. Это изобретение позволило ускорить развитие многих отраслей промышленности, увеличить передаточное число и точность оборудования.
Волновые передачи
Появление и дальнейший процесс развития волновой передачи был осуществлен в далеком 1959 году. Изобретателем, а также человеком, который запатентовал эту технологию, стал американский инженер Массер.
Волновой редуктор состоит из нескольких основных элементов:
- Неподвижное колесо, имеющее внутренние зубья.
- Вращающееся колесо, имеющее наружные зубья.
- Водило.
Среди преимуществ, которые можно выделить у этого способа передачи движения, — меньшая масса и размеры устройства, более высокая точность с кинематической точки зрения, а также меньший мертвый ход. Если есть необходимость, то использовать такой тип передачи движения можно и в герметичном пространстве, не используя при этом уплотняющие сальники. Данный показатель наиболее важен для такой техники, как авиационная, космическая, подводная. Кроме того, волновой редуктор применяется и в некоторых машинах, использующихся в отрасли химической промышленности.
Особенности конструкции
Устройство волнового редуктора зависит от сферы его применения. Основная цель, для которой используется этот механизм – преобразование входного вращательного движения двигателей в:
Основная цель, для которой используется этот механизм – преобразование входного вращательного движения двигателей в:
- выходное поступательное;
- выходное вращательное.
По своей конструкции они схожи с планетарными механизмами так как имеется несколько зон соприкосновения с гибким колесом. Обеспечивает одновременное соприкосновение кулачок. Он имеет несколько выступов, которые образуют волны при вращении. При этом нагрузка распределена по всем зацепляемым зубьям равномерно. При производстве волновых редукторов количество зубьев на колесах варьируется в пределах от 100 до 600.
Место, где вершина волны деформируемого элемента соприкасаются с другой шестерней, называется зоной зацепления.
По количеству таких зон редуктор с гибким элементом может быть:
Большее количество волн встречается крайне редко.
Принцип работы
Волновые редукторы имеют следующий принцип работы:
- Недеформируемое колесо с внутренними зубьями крепится в корпусе.

- Гибкое зубчатое колесо с тонкими стенками устанавливается на генератор волн.
- При вращении генератор волн деформирует гибкое колесо, тем самым перемещает точки соприкосновения наружной и внутренней шестерней.
Плавность хода обеспечивается тем, что на гибком колесе меньшее количество зубьев.
Типы волновых редукторов
Среди всего многообразия устройств данного вида. наибольшее распространение получили волновые мотор-редукторы. Конструкция такого механизма состоит из электродвигателя и непосредственно самой волновой передачи. Основные характеристики, на которые стоит обращать внимание перед покупкой:
- размеры;
- мощность;
- КПД;
- максимальная нагрузка.
Преимущества таких устройств перед моторами другого типа:
- меньшие размеры;
- низкий уровень шума и вибраций;
- устойчивость к нагрузкам.
Основной способ смазки таких устройств заключается в стандартном подводе масла к соприкасающимся элементам. Тем не менее, в некоторых ситуациях требуются герметичные механизмы, без использования смазывающе-охлаждающей жидкости. Работа волнового редуктора фланцевого с пневмодвигателем происходит без смазки. В таком аппарате охлаждение элементов происходит при помощи сжатого воздуха.
Тем не менее, в некоторых ситуациях требуются герметичные механизмы, без использования смазывающе-охлаждающей жидкости. Работа волнового редуктора фланцевого с пневмодвигателем происходит без смазки. В таком аппарате охлаждение элементов происходит при помощи сжатого воздуха.
Червячный волновой редуктор имеет два вида размещения червяка в корпусе – верхнюю и нижнюю. Применение такой механизм нашел в космической отрасли, где требуется герметичность.
Используется в конструкции космической лебедки.
Волновая зубчатая передача появилась относительно недавно, но уже успела зарекомендовать себя с положительной стороны. Она обеспечивает большую волновую деформацию, тем самым увеличивая передаточное отношение. Из достоинств также стоит выделить высокий КПД, небольшие размеры и маленький вес.
Классификация редукторов
На сегодняшний день типы редукторов классифицируются на основе:
- типа механической передачи;
- расположения элементов в пространстве;
- конструктивных особенностей.
В зависимости от расположения элементов они бывают вертикального и горизонтального исполнения. Среди различных типов можно выделить традиционные механические и мотор-редукторы (с дополнительно установленной двигательной установкой).
Читать также: Выжигание по дереву сварочным аппаратом
Основная, общепринятая классификация редукторов разработана в зависимости от типа передачи и по форме шестерен:
Цилиндрический и конический редуктор
В основе таких моделей используются конические и цилиндрические передачи. Данный тип прямого редуктора характеризируется высоким уровнем КПД (более 80%, в зависимости от количества зубьев). Еще одним преимуществом является практически полное отсутствие нагрева из-за отсутствия нагревающихся элементов. Это позволяет добиться простоты механизма, отсутствия необходимости в дополнительных мерах охлаждения. Данный тип получил высокую популярность благодаря надежности и долговечности.
Планетарный
Отличается от большинства других видов схемой расположения элементов. В его основе лежит планетарная передача. Основной ее функцией можно назвать преобразование поступающего момента. Подобные модели отличаются компактностью благодаря тому, что рабочие элементы находятся в одной геометрической оси, чего нельзя встретить в стандартных механизмах. Широко распространены в сфере приборостроения и машиностроения. Они позволяют комбинировать преимущества цилиндрических и червячных.
В его основе лежит планетарная передача. Основной ее функцией можно назвать преобразование поступающего момента. Подобные модели отличаются компактностью благодаря тому, что рабочие элементы находятся в одной геометрической оси, чего нельзя встретить в стандартных механизмах. Широко распространены в сфере приборостроения и машиностроения. Они позволяют комбинировать преимущества цилиндрических и червячных.
Позволяют также добиться оптимального соотношения производительности, компактности, надежности и долговечности.
Червячный
В основе этого вида лежит червячная передача, которая позволяет использовать его для различных целей. Использование этой модели помогает преобразовывать как прямой, так и угловой крутящий момент. В основе конструкции лежит спиралевидный винт, который формой напоминает червяка, из-за чего он получил свое название. Используется довольно редко, так как не отличается надежностью и высокой производительностью. В некоторых случаях при повышении нагрузки может выйти из строя. Несмотря на свои недостатки, он прочно занял свое место в машиностроении, так как является незаменимым при передаче усилия между перпендикулярно расположенными валами.
Несмотря на свои недостатки, он прочно занял свое место в машиностроении, так как является незаменимым при передаче усилия между перпендикулярно расположенными валами.
Волновой
Имеет особенный характеристический размер и тип конструкции, в основе которой лежит неподвижный корпус с нарезанными зубьями. Внутри корпуса расположен гибкий элемент, усилие на которые передается ведущим валом, соединенным с ним. Гибкий элемент изготовлен в виде овала, благодаря чему при движении внутри корпуса создает волнообразные движения.
Данный тип отличается высокой производительностью, имея высокое передаточное отношение, достичь которое невозможно с помощью других моделей
Отличается компактными размерами, что особо важно для использования в точном машиностроении
Следует отметить, что современные тенденции машиностроения требуют особых характеристик от редукторов. Из-за этого все большего распространения получают комбинированные модели. Цилиндрические модели дополняют коническими горизонтальными передачами. Червячные дополняются дополнительными валами, а также некоторые модели оснащаются дополнительными моторами.
Червячные дополняются дополнительными валами, а также некоторые модели оснащаются дополнительными моторами.
Различные виды мотор-редукторов получили широкое распространение благодаря тому, что в одном механизме объединяют еще и электродвигатель и все необходимые дополнительные элементы.
Применение волнового редуктора
За ряд особенностей, недоступных другим механизмам такого типа, привод с волновым редуктором получил широкое распространение во многих отраслях промышленности. Такое устройство встречается:
- в космонавтике и авиастроении;
- в судостроении и на подводных лодках;
- в нефтедобывающей и нефтеперерабатывающей отрасли;
- на химическом производстве;
- в атомных электростанциях;
- в робототехнике и автоматизированных системах;
- при добыче полезных ископаемых.
Герметичность устройства позволяет использовать его в сложных климатических условиях, в вакууме и под водой. Устойчивость к большим нагрузкам и сложным условиям работы нашло применение для этих аппаратов в атомной энергетике и местах с возможностью взрывов и землетрясений. Точность передаваемых движений позволяет использовать их в станках с числовым программным управлением. Высокий запас прочности и длительный срок эксплуатации позволяет использовать редуктор в любом производстве, внедрить его в технологический процесс, задействовать в работе конвейера, автоматизированных систем и другом оборудовании.
Устойчивость к большим нагрузкам и сложным условиям работы нашло применение для этих аппаратов в атомной энергетике и местах с возможностью взрывов и землетрясений. Точность передаваемых движений позволяет использовать их в станках с числовым программным управлением. Высокий запас прочности и длительный срок эксплуатации позволяет использовать редуктор в любом производстве, внедрить его в технологический процесс, задействовать в работе конвейера, автоматизированных систем и другом оборудовании.
Простая конструкция позволяет собрать такой механизм своими руками, но, если цели использования предполагают применение редуктора в сложном технологическом процессе, стоит приобрести профессиональное оборудование. Его стоимость окажется существенно выше, но производитель дает гарантию на оборудование и выполнение им всех поставленных задач.
Волновые редукторы имеют множество преимуществ, за которые нашли повсеместное применение. Они обладают высоким коэффициентом полезного действия, множеством вариантов передаточных чисел, небольшими размерами, высокой точностью и плавной работой движущихся элементов. Высокая стоимость таких устройств в сравнении с другими редукторами, окупается в длительном сроке эксплуатации и недорогом обслуживании.
Высокая стоимость таких устройств в сравнении с другими редукторами, окупается в длительном сроке эксплуатации и недорогом обслуживании.
Источник: https://stankiexpert.ru/tehnologicheskaya-osnastka/zapchasti/volnovoj-reduktor.html
Разновидности планетарных редукторов
В зависимости от количества ступеней, которые они имеют планетарные редукторы подразделяют на:
- одноступенчатые;
- многоступенчатые.
Одноступенчатые более простые и при этом компактнее, меньше по размерам в сравнении с многоступенчатыми, обеспечивают более широкие возможности по передаче крутящего момента, достижения разных передаточных чисел. Обладающие несколькими ступенями являются достаточно громоздкими механизмами, при этом диапазон передаточных чисел, которые ими могут быть обеспечены, существенно меньше.
В зависимости от сложности конструкции они могут быть:
- простыми;
- дифференциальными.
Кроме этого, планетарные редукторы в зависимости от формы корпуса, используемых элементов и внутренней конструкции могут быть:
- коническими;
- волновыми;
- глобоидными;
- червячными;
- цилиндрическими.

Через них может передаваться движение между параллельными, пересекающимися и перекрещивающимися валами.
Сообщений 1 страница 21 из 21
Поделиться105-05-2016 23:22:08
- Автор: JIEXA
- Местный
- Откуда: Калининград
- Зарегистрирован : 01-06-2012
- Приглашений: 0
- Сообщений: 185
- Уважение: [+67/-3]
- Позитив: [+151/-8]
- Пол: Мужской
- Возраст: 47 [1973-06-17]
- Skype: region-39
- Провел на форуме: 11 дней 16 часов
- Последний визит: 02-09-2020 12:44:33
Никто не пытался сделать самостоятельно сей девайс? В принципе ничего сложного. Ссылка Ссылка Мои изыскания на эту тему, но что-то не сходиться.
Отредактировано JIEXA (05-05-2016 23:37:34)
Поделиться206-05-2016 10:27:58
- Автор: megagad
- Местный
- Зарегистрирован : 11-10-2014
- Приглашений: 0
- Сообщений: 180
- Уважение: [+23/-1]
- Позитив: [+9/-5]
- Провел на форуме: 2 дня 18 часов
- Последний визит: 04-08-2017 06:32:17
«Гипоциклоида» никоим боком к «волновым» редукторам не относится. Для изготовления гипоциклоиды много навыков не надо — нужен точный станок и много-много смазки И да — а что за формат файла?
Для изготовления гипоциклоиды много навыков не надо — нужен точный станок и много-много смазки И да — а что за формат файла?
Поделиться306-05-2016 11:38:48
- Автор: Flint2015
- Гуру
- Зарегистрирован : 30-12-2014
- Приглашений: 1
- Сообщений: 1410
- Уважение: [+271/-1]
- Позитив: [+32/-6]
- Провел на форуме: 29 дней 2 часа
- Последний визит: 28-08-2020 08:42:24
«Гипоциклоида» никоим боком к «волновым» редукторам не относится
Всё, что показано на видео и есть, разновидности волновых редукторов. То что вы называете гипоциклоида, вы же обратили внимание на каком языке это написано., название не меняет смысла волнового принципа работы.
Никто не пытался сделать самостоятельно сей девайс? В принципе ничего сложного.
Вроде бы ничего сложного, но есть большое НО, 1 как минимум 2 хороших станка (токарный и вертикальнофрезерный) 2 подбор материала (металла) и 3 минимальные инженерные навыки, для расчёта зубьев и размера экцентрика.
Отредактировано Flint2015 (06-05-2016 11:39:11)
Поделиться406-05-2016 12:33:12
- Автор: megagad
- Местный
- Зарегистрирован : 11-10-2014
- Приглашений: 0
- Сообщений: 180
- Уважение: [+23/-1]
- Позитив: [+9/-5]
- Провел на форуме: 2 дня 18 часов
- Последний визит: 04-08-2017 06:32:17
название не меняет смысла волнового принципа работы.
Ок. Покажите на схеме «генератор волны»
вы же обратили внимание на каком языке это написано., название не меняет смысла волнового принципа работы.
Зачем мне читать название, когда я смотрю видео? на видео — обычный гипоцклоидный редуктор. К волновым редукторам данное поделие не имеет отношения ВООБЩЕ! Оно ближе к «планетарным» редукторам с высоким коэффициентом редукции.
Поделиться506-05-2016 16:21:29
- Автор: JIEXA
- Местный
- Откуда: Калининград
- Зарегистрирован : 01-06-2012
- Приглашений: 0
- Сообщений: 185
- Уважение: [+67/-3]
- Позитив: [+151/-8]
- Пол: Мужской
- Возраст: 47 [1973-06-17]
- Skype: region-39
- Провел на форуме: 11 дней 16 часов
- Последний визит: 02-09-2020 12:44:33
Ок. Покажите на схеме «генератор волны»
Покажите на схеме «генератор волны»
Эксцентрик разве не является генератором волны?
принцип работы, устройство, применение, типы
С момента создания первой зубчатой передачи прошло много лет. Многие известные инженеры приложили немало усилий для усовершенствования этого процесса и изобретения новых механизмов. Одним из таких людей стал американский инженер У. Массер, который в 1959 году изобрел волновой редуктор. Принцип работы был основан на использовании гибкого зубчатого колеса, передающего движение другой шестерне. Это изобретение позволило ускорить развитие многих отраслей промышленности, увеличить передаточное число и точность оборудования.
Особенности конструкции
Устройство волнового редуктора зависит от сферы его применения. Основная цель, для которой используется этот механизм – преобразование входного вращательного движения двигателей в:
- выходное поступательное;
- выходное вращательное.
По своей конструкции они схожи с планетарными механизмами так как имеется несколько зон соприкосновения с гибким колесом. Обеспечивает одновременное соприкосновение кулачок. Он имеет несколько выступов, которые образуют волны при вращении. При этом нагрузка распределена по всем зацепляемым зубьям равномерно. При производстве волновых редукторов количество зубьев на колесах варьируется в пределах от 100 до 600.
Обеспечивает одновременное соприкосновение кулачок. Он имеет несколько выступов, которые образуют волны при вращении. При этом нагрузка распределена по всем зацепляемым зубьям равномерно. При производстве волновых редукторов количество зубьев на колесах варьируется в пределах от 100 до 600.
Место, где вершина волны деформируемого элемента соприкасаются с другой шестерней, называется зоной зацепления.
По количеству таких зон редуктор с гибким элементом может быть:
Большее количество волн встречается крайне редко.
Принцип работы
Волновые редукторы имеют следующий принцип работы:
- Недеформируемое колесо с внутренними зубьями крепится в корпусе.
- Гибкое зубчатое колесо с тонкими стенками устанавливается на генератор волн.
- При вращении генератор волн деформирует гибкое колесо, тем самым перемещает точки соприкосновения наружной и внутренней шестерней.
Плавность хода обеспечивается тем, что на гибком колесе меньшее количество зубьев.
Типы волновых редукторов
Среди всего многообразия устройств данного вида. наибольшее распространение получили волновые мотор-редукторы. Конструкция такого механизма состоит из электродвигателя и непосредственно самой волновой передачи. Основные характеристики, на которые стоит обращать внимание перед покупкой:
- размеры;
- мощность;
- КПД;
- максимальная нагрузка.
Преимущества таких устройств перед моторами другого типа:
- меньшие размеры;
- низкий уровень шума и вибраций;
- устойчивость к нагрузкам.
Основной способ смазки таких устройств заключается в стандартном подводе масла к соприкасающимся элементам. Тем не менее, в некоторых ситуациях требуются герметичные механизмы, без использования смазывающе-охлаждающей жидкости. Работа волнового редуктора фланцевого с пневмодвигателем происходит без смазки. В таком аппарате охлаждение элементов происходит при помощи сжатого воздуха.
Червячный волновой редуктор имеет два вида размещения червяка в корпусе – верхнюю и нижнюю. Применение такой механизм нашел в космической отрасли, где требуется герметичность.
Применение такой механизм нашел в космической отрасли, где требуется герметичность.
Используется в конструкции космической лебедки.
Волновая зубчатая передача появилась относительно недавно, но уже успела зарекомендовать себя с положительной стороны. Она обеспечивает большую волновую деформацию, тем самым увеличивая передаточное отношение. Из достоинств также стоит выделить высокий КПД, небольшие размеры и маленький вес.
Применение оборудования для разных типов газа
По виду редуцируемого газа редукторы делятся на следующие типы:
- ацетиленовые;
- водородные;
- кислородные;
- пропан-бутановые;
- метановые.
На рисунке показаны разные виды редукторов
Вместе с тем, все варианты можно условно разделить на устройства для горючих и негорючих газов. Баллоны с горючей газовой смесью имеют левую резьбу, тогда как емкости для инертных газов и кислорода оснащены правой резьбой. Это сделано для того, чтобы предотвратить случайное присоединение редуцирующего элемента, предназначенного, например, для метана, к баллону с кислородом.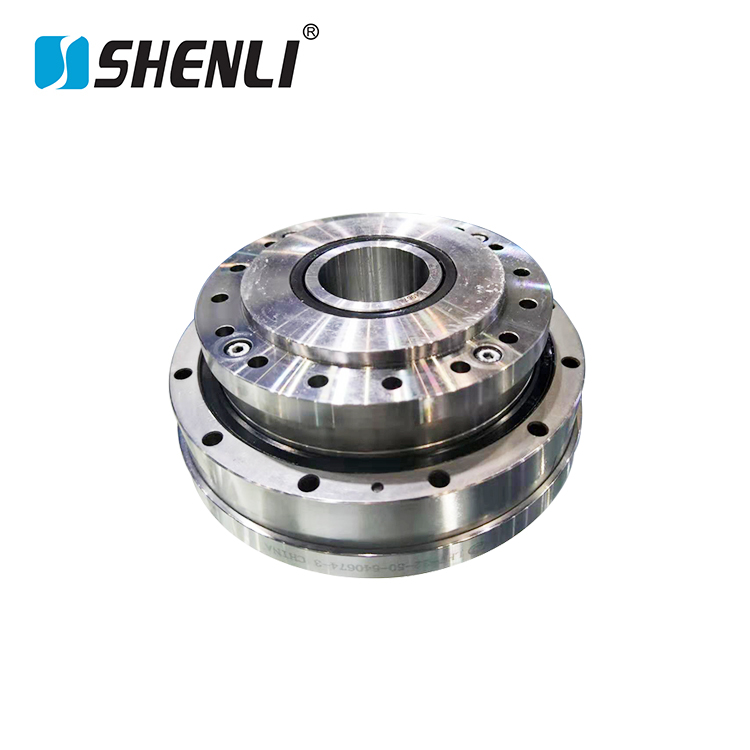 Кстати, больше информации об автономной газификации Вы найдете в этом разделе.
Кстати, больше информации об автономной газификации Вы найдете в этом разделе.
Для сжиженных углеводородных газов устройство газовых редукторов может иметь одну конструктивную особенность. С целью предотвращения замерзания газа на выходе, корпус приспособления выполняется с развитым оребрением.
На долговечность работы редуктора большое значение оказывает качество газа. Поэтому заправку резервуаров необходимо осуществлять у надежных , где помимо хорошего обслуживания можно получить профессиональную консультацию по работе с любым газовым оборудованием.
Источник
Волновые редукторы. | PRO-TechInfo
Назначение и принцип работы волновых передач.
Волновые передачи основаны на принципе передачи вращательного движения за счет бегущей волновой деформации одного из зубчатых колес.
Такая передача была запатентована американским инженером Массером в 1959 г.
Волновые передачи имеют меньшие массу и габариты, большую кинематическую точность, меньший мёртвый ход, высокую вибропрочность за счёт демпфирования (рассеяния энергии) колебаний, создают меньший шум.
При необходимости такие передачи позволяют передавать движение в герметичное пространство без применения уплотняющих сальников, что особенно ценно для авиационной, космической и подводной техники, а также для машин химической промышленности.
Кинематически эти передачи представляют собой разновидность планетарной передачи с одним гибким зубчатым колесом.
Основные элементы волновой передачи:
- неподвижное колесо с внутренними зубьями,
- вращающееся упругое колесо с наружными зубьями,
- водило.
Неподвижное колесо закрепляется в корпусе и выполняется в виде обычного зубчатого колеса с внутренним зацеплением. Гибкое зубчатое колесо имеет форму стакана с легко деформирующейся тонкой стенкой: в утолщенной части (левой) нарезаются зубья, правая часть имеет форму вала. Водило состоит из овального кулачка и специального подшипника.
Передача движения осуществляется за счет деформирования зубчатого венца гибкого колеса. При вращении водила волна деформации бежит по окружности гибкого зубчатого венца; при этом венец обкатывается по неподвижному жесткому колесу в обратном направлении, вращая стакан и вал. Поэтому передача и называется волновой, а водило — волновым генератором.
Поэтому передача и называется волновой, а водило — волновым генератором.
Конструкции волновых редукторов.
Существует большое количество конструкций волновых механизмов. Обычно эти механизмы преобразуют входное вращательное движение в выходное вращательное или поступательное. Волновые механизмы можно рассматривать как одну из разновидностей многопоточных планетарных механизмов, так как они обладают многозонным, а в случае зубчатого механизма, и многопарным контактом выходного звена с гибким колесом. Многозонный контакт обеспечивается за счет формы генератора волн (кулачок чаще с двумя, редко с тремя выступами), многопарный — за счет податливости зубчатого венца гибкого колеса. Такое сочетание позволяет волновым механизмам передавать значительные нагрузки при малых габаритах. Податливость зубчатого венца обеспечивает достаточно равномерное распределение нагрузки по зубьям, находящимся в зоне зацепления. При номинальных нагрузках процент зубьев находящихся в зацеплении составляет 15-25% от общего их числа. Поэтому в волновых передачах применяется мелкомодульное зацепление, а числа зубьев колес лежат в пределах от 100 до 600. Зона зацепления в волновой зубчатой передаче совпадает с вершиной волны деформации. По числу зон или волн передачи делятся на одноволновые, двухволновые и так далее. При вращении водила овальной формы образуются две волны. Такую передачу называют двухволновой. Бывают трехволновые передачи. Передачи с числом волн более трех применяются редко.
Поэтому в волновых передачах применяется мелкомодульное зацепление, а числа зубьев колес лежат в пределах от 100 до 600. Зона зацепления в волновой зубчатой передаче совпадает с вершиной волны деформации. По числу зон или волн передачи делятся на одноволновые, двухволновые и так далее. При вращении водила овальной формы образуются две волны. Такую передачу называют двухволновой. Бывают трехволновые передачи. Передачи с числом волн более трех применяются редко.
Виды мотор-редукторов
Сегодня разработано большое число вариантов мотор-редукторов, различающихся типом двигателя, принципом построения механической части и общей геометрией. Практически все возможные комбинации присутствуют в каталогах производителей.
По виду механического зацепления подразделяют цилиндрические, конические, червячные и планетарные модели. По взаимному расположению входного и выходного валов рассматривают соосные, параллельные и угловые варианты. Исходя из передаваемых мощностей выделяют модули обычного размера и мини мотор-редукторы. По типу присоединения к процессу, встречаются варианты с одно- и двухсторонним валом, а также с полым выходным валом.
По типу присоединения к процессу, встречаются варианты с одно- и двухсторонним валом, а также с полым выходным валом.
Цилиндрические мотор-редукторы
Агрегаты, использующие классические цилиндрические редукторы получили большое распространение, благодаря простоте, надежности и универсальности механической части устройства. Их использование возможно в широком спектре оборудования. В зависимости от общей конструкции, цилиндрические мотор-редукторы выполняются с соосными или параллельными валами. Количество ступеней может варьироваться от одной до шести.
По способу расположения шестерен и общей компоновке выделяют горизонтальные и вертикальные модели. Такие устройства характеризуются высоким КПД, долговечностью и относительно невысокой стоимостью. В отличие от многих других вариантов, цилиндрические редукторы обычно не допускают произвольного расположения в пространстве, что значительно ограничивает их область применения.
Конические мотор-редукторы
Устройства, собранные на основе конических шестерен, позволяют построить угловой конический мотор-редуктор. Его главной особенностью будет перпендикулярное расположение входного и выходного валов. Это ориентирует их на использование в устройствах, требующих смены направления осей. Также конические модели выгодно устанавливать в конструкциях, предъявляющих ограничение по одному из габаритных размеров устройства. Редукторы данного типа отличаются более высокой стоимостью, в виду значительной сложности изготовления отдельных деталей. Передаточное отношение конических моделей обычно невелико. Для его повышения, коническую и цилиндрическую передачи часто комбинируют, результатом чего становится коническо-цилиндрический мотор-редуктор.
Его главной особенностью будет перпендикулярное расположение входного и выходного валов. Это ориентирует их на использование в устройствах, требующих смены направления осей. Также конические модели выгодно устанавливать в конструкциях, предъявляющих ограничение по одному из габаритных размеров устройства. Редукторы данного типа отличаются более высокой стоимостью, в виду значительной сложности изготовления отдельных деталей. Передаточное отношение конических моделей обычно невелико. Для его повышения, коническую и цилиндрическую передачи часто комбинируют, результатом чего становится коническо-цилиндрический мотор-редуктор.
Червячные модели
Сегодня, огромную популярность приобрели червячные одноступенчатые мотор-редукторы. В качестве механической передачи в них используется червячная пара. Она обеспечивает высокое передаточное отношение при сравнительно небольших габаритах. Благодаря этому стоимость червячных моделей ниже аналогов с иной конструкцией. Среди других особенностей следует выделить перпендикулярное расположение валов и самостоятельное затормаживание механизма при отсутствии внешнего поступления энергии.
В отличие от цилиндрических и конических моделей, приложение усилия к выходному валу не приведет к проворачиванию механизма. Благодаря этому такие редукторы часто используют в ответственных решениях и подъемно-транспортных устройствах. Червячные редукторы обычно не требовательны к положению установки. Благодаря герметичному корпусу их можно располагать произвольным образом, вследствие чего эти модели активно применяются для модернизации привода станков, промышленных линий и других механизмов. Среди недостатков червячных моделей обычно выделяют небольшой КПД и повышенное тепловыделение.
Планетарные и волновые мотор-редукторы
Благодаря компактности и высоким рабочим моментам, планетарные мотор-редукторы нашли широкое использование в небольших устройствах привода. Высокое передаточное отношение и способность работать с большими нагрузками, ориентирует их на использование совместно с серводвигателями промышленных роботов и других автоматических устройств. Встречаются планетарные модели и общепромышленного применения. Благодаря особенностям конструкции зубчатой передачи, данные модели мотор-редукторов выполняются с соосными валами. Это позволяет их использовать для привода практически любых механизмов.
Благодаря особенностям конструкции зубчатой передачи, данные модели мотор-редукторов выполняются с соосными валами. Это позволяет их использовать для привода практически любых механизмов.
Дальнейшим развитием планетарных передач стали волновые редукторы. Они обеспечивают большое передаточное отношение, плавность хода и высокую точность позиционирования выходного вала. Благодаря этому такие модели стали основой построения промышленных роботов. Наряду с высокими характеристиками, данные типы передач отличаются высокими требованиями к изготовлению, а, следовательно, и высокой стоимостью, что существенно сдерживает распространение данных моделей.
Редуктор волновой с эвольвентным профилем зубьев.
Описание конструкции волнового редуктора.
Редуктор волновой с эвольвентным профилем зубьев — это одноступенчатый редуктор с двумя зубчатыми колесами: одно — жесткое с внутренними зубьями, второе — гибкое — в виде цилиндра с зубчатым венцом. Гибкий зубчатый венец деформируется генератором волн. Генератор состоит из кулачка, насаженного на быстроходный вал, и шарикоподшипника с тонкими кольцами. Недеформируемый конец гибкого цилиндра шлицевый. Шлицы нарезаны обычным зуборезным инструментом. От осевого смещения цилиндр удерживается проволочным кольцом, расположенным на шлицах.
Генератор состоит из кулачка, насаженного на быстроходный вал, и шарикоподшипника с тонкими кольцами. Недеформируемый конец гибкого цилиндра шлицевый. Шлицы нарезаны обычным зуборезным инструментом. От осевого смещения цилиндр удерживается проволочным кольцом, расположенным на шлицах.
Тихоходный вал вращается в противоположном направлении относительно быстроходного вала.
Сборка жесткого колеса с гибким осуществляется после деформации гибкого зубчатого венца генератором. Зацепление и подшипники смазываются маслом, разбрызгиваемым генератором. Охлаждается редуктор вентилятором, установленным на быстроходном валу.
Редуктор предназначен для непрерывной длительной работы. КПД редуктора 0,85…0,9. Возможна передача вращения от тихоходного вала к быстроходному, КПД мультипликатора на 15…30% ниже КПД редуктора.
Схема взаимодействия звеньев.
Технические характеристики волнового редуктора.
- Крутящий момент на тихоходном валу: 1000 Н⋅м;
- Частота вращения тихоходного вала: 14,2 мин -1 ;
- Мощность на тихоходном валу: 1,5 кВт;
- Передаточное число: 100;
- КПД редуктора: 0,85…0,9;
- Материал зубчатых колес: сталь 30ХГС, твердость: 30…35HRCэ.

Редуктор волновой для передачи вращения в герметизированное пространство
Описание конструкции волнового редуктора.
Редуктор волновой для передачи вращения в герметизированное пространство состоит из неподвижного гибкого колеса с внешними зубьями, жесткого колеса с внутренними зубьями (соединенного с тихоходным валом) и дискового генератора волн. Гибкое колесо выполнено в виде тонкостенного стакана с фланцем, соединенным герметично с корпусам. Для уменьшении несоосности гибкого и жесткого колес корпусные детали центрируются по фланцу ∅115 Н7/h6. Эксцентриковый вал генератора волн закреплен в одном подшипнике и самоустанавливается по гибкому колесу.
Источник: https://90zavod.ru/xarakteristiki/reduktor-volnovoj-xarakteristiki-princip-raboty-ustrojstvo-primenenie-tipy.html
Волновые редукторы
Волновые зубчатые передачи позволяют осуществлять большие передаточные отношения в одной ступени. При этом КПД их такой же, как и в планетарных передачах при тех же передаточных отношениях.
Редуктор волновой с кулачковым генератором волн
Редуктор одноступенчатый с двумя зубчатыми колесами: жестким с внутренними зубьями и гибким в виде цилиндра с зубчатым венцом. Гибкий зубчатый венец деформируется генератором волн. Генератор состоит из кулачка, насаженного на быстроходный вал, и шарикового подшипника с тонкими кольцами. Недеформируемыи генератором конец цилиндра шлицевый. Шлицы нарезаны тем же зуборезным инструментом, что и колеса. От осевого смещения цилиндр удерживается проволочным кольцом, расположенным на шлицах. Тихоходный вал вращается в противоположном направлении относительно быстроходного вала. Сборку жесткого колеса с гибким осуществляют после деформации гибкого зубчатого венца генератором. Зацепление и подшипники смазываются маслом, разбрызгиваемым генератором. Охлаждается редуктор вентилятором, установленным на быстроходном валу. Редуктор предназначен для непрерывной длительной работы, его КПД равен 0,85…0,9. Возможна переача вращения от тихоходного вала к быстроходному, КПД мультипликатора на 15…30 % ниже КПД редуктора.
Расчеты редуктора
Как и для любой другой детали, для создания редуктора необходимо проводить определенные расчеты, которые будут показывать, способно ли устройство выполнять свои функции, а также из какого материала должно выполняться устройство и т.д. Основным критерием для расчета волнового редуктора, его работоспособности, является прочность гибкого колеса. Оценить данный параметр можно при помощи сопротивления усталости зубчатого венца. Основной габаритный размер передачи — это внутренний диаметр гибкого колеса. Определяется он по приближенной зависимости сопротивления усталости с учетом нормальных напряжений.
ООО «Хармоник Драйв» | Гармоник Драйв
- ГармоникДрайв®
- Гармонический планетарный®
- Тип продукта — преимущества
- Изобретатель, К. Уолтон Массер
- Рекомендации по установке
- Примеры применения
- Видео
Волновые редукторы Harmonic Drive® являются уникальными в своем классе, когда речь идет об управлении движением и передаче механической энергии. Благодаря принципам работы и конструкции, которые максимизируют выходной крутящий момент и минимизируют размер и вес , редукторы Harmonic Drive® обеспечивают преимущества , такие как высокие передаточные отношения в одной ступени, нулевой люфт и высокой точностью, которую не могут обеспечить обычные зубчатые передачи. Щелкните здесь, чтобы просмотреть полный ассортимент нашей продукции.
Благодаря принципам работы и конструкции, которые максимизируют выходной крутящий момент и минимизируют размер и вес , редукторы Harmonic Drive® обеспечивают преимущества , такие как высокие передаточные отношения в одной ступени, нулевой люфт и высокой точностью, которую не могут обеспечить обычные зубчатые передачи. Щелкните здесь, чтобы просмотреть полный ассортимент нашей продукции.
Как работает Harmonic Gearing
Принцип волновой передачи
Волновая передача Harmonic Drive® использует уникальный принцип работы, основанный на упругой механике металлов. Самыми большими преимуществами волновых зубчатых передач с гармоническими деформациями являются характеристики нулевого люфта, а также вес и экономия места по сравнению с другими зубчатыми колесами, поскольку наш зубчатый механизм состоит всего из трех основных частей. Это: генератор волн, гибкий сплайн и круговой сплайн.
Это: генератор волн, гибкий сплайн и круговой сплайн.
Эта простая трехэлементная конструкция в сочетании с уникальным принципом работы обеспечивает чрезвычайно высокую степень измельчения в очень компактном и легком корпусе. Ни размер, ни вес шестерни не зависят от передаточного числа. Высокие эксплуатационные характеристики этой технологии зубчатых передач, включая нулевой люфт, высокий крутящий момент, компактный размер, превосходную точность позиционирования и повторяемость, являются прямым результатом уникального принципа работы.
Волновой редуктор был изобретен и запатентован в 1955 гениального изобретателя из США К. Уолтона Массера.
Как работает гармоническая передача.
Компоненты
Генератор волн
Генератор волн тензометрического зубчатого колеса состоит из специально разработанного тонкого шарикоподшипника с дорожками качения, установленного на эллиптической ступице. Он служит в качестве высокоэффективного преобразователя крутящего момента, используется как вход шестерни и соединяется с валом двигателя.
Flexspline
Flexspline представляет собой тонкую цилиндрическую чашку из легированной стали с внешними зубьями на открытом конце чашки. Flexspline является радиально податливым, но очень жестким на кручение. Когда Генератор волн вставляется в Flexspline, шестерня принимает свою эллиптическую форму. Flexspline используется в качестве выхода и соединяется с выходным фланцем.
Круглое шлицевое соединение
Круглое шлицевое соединение представляет собой жесткое кольцо с внутренними зубьями. Когда шестерня собрана, она входит в зацепление с зубьями Flexspline поперек главной оси эллипса генератора волн. Circular Spline имеет на два зуба больше, чем Flexspline, и крепится к корпусу редуктора.
Как это работает
Ниже представлена увеличенная двухмерная диаграмма, показывающая, как три зубчатых колеса взаимодействуют и вращаются.
Flexspline немного меньше в диаметре и имеет на два зуба меньше, чем Circular Spline. Эллиптическая форма генератора волн приводит к тому, что зубья гибкого сплайна взаимодействуют с круговым сплайном в двух противоположных областях вдоль главной оси эллипса. При каждом повороте генератора волн на 180 градусов по часовой стрелке зубья Flexspline смещаются на один зуб против часовой стрелки относительно кругового шлица. Каждый полный оборот Генератора волн по часовой стрелке приводит к тому, что Flexspline перемещается против часовой стрелки на два зуба от своего исходного положения относительно кругового сплайна. Поскольку зубья шестерни всегда полностью входят в зацепление вдоль главной оси, редукторы Harmonic Drive® имеют нулевой люфт.
Эллиптическая форма генератора волн приводит к тому, что зубья гибкого сплайна взаимодействуют с круговым сплайном в двух противоположных областях вдоль главной оси эллипса. При каждом повороте генератора волн на 180 градусов по часовой стрелке зубья Flexspline смещаются на один зуб против часовой стрелки относительно кругового шлица. Каждый полный оборот Генератора волн по часовой стрелке приводит к тому, что Flexspline перемещается против часовой стрелки на два зуба от своего исходного положения относительно кругового сплайна. Поскольку зубья шестерни всегда полностью входят в зацепление вдоль главной оси, редукторы Harmonic Drive® имеют нулевой люфт.
Превосходная производительность зубчатого колеса благодаря конструкции зуба S
Компания Harmonic Drive разработала уникальный профиль зубчатого колеса, который оптимизирует зацепление зубьев. Он имеет особую изогнутую поверхность, уникальную для профиля зуба S, которая обеспечивает непрерывный контакт с профилем зуба. Это также уменьшает концентрацию напряжения за счет увеличения ширины канавки зуба по сравнению с толщиной зуба и увеличения радиуса на дне. Такой профиль зубьев позволяет одновременно использовать до 30% общего количества зубьев. Кроме того, большой радиус корня зуба увеличивает прочность зуба по сравнению с эвольвентным зубом. Это технологическое новшество обеспечивает высокий крутящий момент, высокую жесткость на кручение, долгий срок службы и плавное вращение.
Это также уменьшает концентрацию напряжения за счет увеличения ширины канавки зуба по сравнению с толщиной зуба и увеличения радиуса на дне. Такой профиль зубьев позволяет одновременно использовать до 30% общего количества зубьев. Кроме того, большой радиус корня зуба увеличивает прочность зуба по сравнению с эвольвентным зубом. Это технологическое новшество обеспечивает высокий крутящий момент, высокую жесткость на кручение, долгий срок службы и плавное вращение.
Принцип планетарной передачи
Планетарные шестерни имеют одновременное зацепление между солнечной шестерней и планетарной шестерней, а также между планетарной шестерней и внутренней шестерней. Солнечная шестерня соединена с двигателем, а водило, поддерживающее планетарные шестерни, соединено с выходом. Одноступенчатые планетарные редукторы могут достигать передаточного числа до 10:1. Передаточное число выше 10:1 использует двухступенчатую конструкцию, в которой водило первой ступени приводит в движение солнечную шестерню второй планетарной ступени.
Свяжитесь с нами, если у вас есть какие-либо вопросы или вам нужна дополнительная информация. Мы любим говорить о наших технологиях и будем рады вашему звонку или электронной почте. Наша команда инженеров в США имеет многолетний опыт в области точного управления движением. Используйте нас в качестве ресурса для следующего дизайн-проекта.
Что такое Strain Wave Gear, также известный как Harmonic Drive? Идеальный комплект передач для робототехники!?
В этом уроке мы узнаем, что такое Strain Wave Gear, также известный как Harmonic Drive. Сначала мы объясним принцип его работы, затем разработаем собственную модель и распечатаем ее на 3D-принтере, чтобы мы могли увидеть ее в реальной жизни и лучше понять, как она работает.
Вы можете посмотреть следующее видео или прочитать письменное руководство ниже.
Что такое Strain Wave Gear?
Волновая шестерня Strain представляет собой уникальный тип механической зубчатой передачи, которая обеспечивает очень высокое передаточное отношение в компактном и легком корпусе. По сравнению с традиционными системами зубчатых передач, такими как косозубые или планетарные передачи, он может достигать гораздо более высоких передаточных чисел, до 30 раз в том же пространстве. Кроме того, он обладает беззазорной характеристикой, высоким крутящим моментом, точностью и надежностью. Таким образом, эта система зубчатых передач используется во многих приложениях, включая робототехнику, аэрокосмическую промышленность, медицинские машины, фрезерные станки, производственное оборудование и так далее.
По сравнению с традиционными системами зубчатых передач, такими как косозубые или планетарные передачи, он может достигать гораздо более высоких передаточных чисел, до 30 раз в том же пространстве. Кроме того, он обладает беззазорной характеристикой, высоким крутящим моментом, точностью и надежностью. Таким образом, эта система зубчатых передач используется во многих приложениях, включая робототехнику, аэрокосмическую промышленность, медицинские машины, фрезерные станки, производственное оборудование и так далее.
Волновой редуктор был изобретен в 1957 году К. Уолтоном Муссером, а другое название, которое обычно используется для него, «Harmonic Drive», на самом деле является торговой маркой волнового редуктора, зарегистрированного под торговой маркой компании Harmonic Drive.
Как это работает
Хорошо, теперь давайте посмотрим, как это работает. Гармонический привод состоит из трех ключевых компонентов: генератора волн, гибкого шлица и кругового шлица.
Генератор волн имеет эллиптическую форму и состоит из эллиптической ступицы и специального тонкостенного подшипника, повторяющего эллиптическую форму ступицы. Это вход набора шестерен, и он соединен с валом двигателя.
Это вход набора шестерен, и он соединен с валом двигателя.
Когда генератор волн вращается, он генерирует волновое движение.
Шлиц Flex имеет форму цилиндрической чашки и изготовлен из гибкого, но жесткого на кручение материала из легированной стали. Бока чашки очень тонкие, но дно толстое и жесткое.
Это позволяет сделать открытый конец стакана гибким, а закрытый конец достаточно жестким, и поэтому мы можем использовать его в качестве выхода и подсоединить к нему выходной фланец. Гибкий шлиц имеет внешние зубья на открытом конце чашки.
С другой стороны, круговой шлиц представляет собой жесткое кольцо с зубьями внутри. У кругового шлица на два зуба больше, чем у гибкого шлица, который на самом деле является ключевой конструкцией зубчатой системы с волновой передачей.
Итак, когда мы вставляем генератор волн в сплайн Flex, сплайн Flex принимает форму генератора волн.
При вращении генератор волн радиально деформирует открытый конец гибкого шлица. Генератор волн и гибкий шлиц затем помещаются внутрь кругового шпона, сцепляя зубья вместе.
Генератор волн и гибкий шлиц затем помещаются внутрь кругового шпона, сцепляя зубья вместе.
Из-за эллиптической формы гибкого шлица зубья зацепляются только в двух областях на противоположных сторонах гибкого шлица, а именно поперек главной оси эллипса генератора волн.
Теперь, когда генератор волн вращается, зубья шлица Flex, находящиеся в зацеплении с зубьями кругового шлица, будут медленно менять положение. Из-за разницы в количестве зубьев между гибким шлицем и круговым шлицем, для каждого поворота генератора волн на 180 градусов зацепление зубьев приведет к тому, что гибкий шлиец будет поворачиваться на небольшую величину назад относительно генератора волн. Другими словами, при каждом повороте генератора волн на 180 градусов зацепление зубьев гибкого шлица с круговым шлицом будет продвигаться только на один зуб.
Итак, за полный оборот генератора волн на 360 градусов гибкая шлицевая рейка изменит положение или продвинется на два зуба.
Например, если гибкий шлиц имеет 200 зубьев, генератор волн должен сделать 100 оборотов, чтобы гибкий шлиц продвинулся на 200 зубьев, или это всего лишь один оборот для гибкого шпона. Это соотношение 100:1. В таком случае круговой шлиец будет иметь 202 зубца, так как количество зубьев круглого шлица всегда на два больше, чем у гибкого шлица.
Это соотношение 100:1. В таком случае круговой шлиец будет иметь 202 зубца, так как количество зубьев круглого шлица всегда на два больше, чем у гибкого шлица.
Мы можем легко рассчитать коэффициент редукции по следующей формуле. Отношение равно зубьям гибкого шлица — зубья круглого шлица, разделенные на зубья гибкого шлица.
Итак, на примере 200 зубьев на гибком шлице и 202 зубца на круглом шлице коэффициент уменьшения составляет -0,01. Это 1/100 скорости генератора волн, а знак минус указывает на то, что выход находится в противоположном направлении.
Мы можем получить различные передаточные отношения, изменив количество или количество зубьев.
Этого можно добиться, либо изменив диаметр механизма при сохранении размера зубьев, либо изменив размер зубьев, сохранив размер и вес набора шестерен.
Деформационно-волновая передача — 3D-модель Harmonic Drive
Итак, теперь, когда мы знаем теорию, лежащую в основе Волновой передачи деформации, позвольте мне показать вам, как я спроектировал ее, чтобы мы могли построить ее, просто используя 3D-принтер.
Я спроектировал эту модель Strain Wave Gear с помощью Fusion 360. Все эти детали можно распечатать на 3D-принтере, поэтому нам нужны болты, гайки и подшипники, чтобы завершить сборку. Что касается ввода, я решил использовать шаговый двигатель NEMA 17.
Вот как я спроектировал 3 ключевых элемента зубчатой передачи деформации: круговой шлиц, гибкий шлиц и генератор волн. Поскольку у 3D-принтеров есть свои собственные ограничения на качество, точность и точность печати, первое, что мне нужно было решить, — это модуль шестерен или насколько большими или маленькими будут зубья. Я выбрал модуль 1,25 и 72 зуба для кругового шлица.
Конечно, у гибкого шлица должно быть на 2 зубца меньше, то есть 70 зубьев. Это приведет к передаточному числу 35:1 при относительно небольшом размере набора шестерен.
Что касается генератора волн, мы не можем использовать те специальные тонкостенные подшипники, упомянутые ранее, так как их нелегко найти. Вместо этого мы будем использовать обычные шарикоподшипники, расположенные по окружности эллипса. Размеры эллипса должны быть выполнены по размерам внутренней стенки гибкого шлица.
Размеры эллипса должны быть выполнены по размерам внутренней стенки гибкого шлица.
Я сделал радиус главной оси эллипса на 1,25 мм больше, чем радиус внутренней стенки гибкого шлица. С другой стороны, радиус малой оси эллипса на 1,25 мм меньше.
Генератор волн состоит из двух секций, на которые можно легко установить 10 подшипников. В одной из этих секций также имеется муфта вала, подходящая для крепления шагового двигателя NEMA 17.
Остальные детали спроектированы вокруг этих трех ключевых компонентов. На выходной стороне корпуса мы вставим два подшипника с внешним диаметром 47 мм и закрепим их с помощью нескольких болтов и гаек.
Выходной фланец состоит из двух частей, соединенных болтами и гайками, поэтому мы можем легко закрепить его на двух подшипниках.
Файлы STL, необходимые для 3D-печати ниже.
Вы можете скачать эту 3D-модель, а также изучить ее в своем браузере на Thangs.
Загрузите 3D-модель на Thangs.
Файлы STL, необходимые для 3D-печати:
См. также: Лучшие 3D-принтеры для начинающих и производителей [Обновление 2021 г.]
также: Лучшие 3D-принтеры для начинающих и производителей [Обновление 2021 г.]
3D-печать Strain Wave Gear — Harmonic Drive
Хорошо, пришло время 3D-печати деталей. При 3D-печати шестерен важно использовать функцию горизонтального расширения в программном обеспечении для нарезки.
Я установил значение -0,15 мм и получил относительно приличную точность печати. Обратите внимание, что это может варьироваться от принтера к принтеру. Если мы не используем эту функцию, отпечатки будут немного больше из-за расширения нити при печати, и детали или шестерни не смогут правильно зацепиться.
Я использовал свой 3D-принтер Creality CR-10 для печати всех деталей, и я думаю, что он хорошо справился с этой задачей, учитывая его цену.
Итак, вот все напечатанные на 3D-принтере детали.
Нам просто нужны болты, гайки и подшипники для завершения сборки привода Harmonic.
Here’s a complete list of all components:
- Bolts:
- M3x16 – 13 pieces
- M3x12 – 4
- M4x12 – 6
- M4x25 – 6
- M4x30 – 6
- M4x40 – 4
- Гайки:
- M3 самоконтрящиеся – 13
- M4 самоконтрящиеся – 16
- M4 – 10
- Подшипники:
- (наружный диаметр) 16 мм x (внутренний диаметр) 5 мм x (ширина) 5 мм – 10 ………….
 . Amazon
. Amazon - (наружный диаметр) 47 мм x (внутренний диаметр) 35 мм x (ширина) 7 мм – 2 ………… .. Amazon
- Электроника:
- Шаговый двигатель – NEMA 17……………… Amazon / Banggood
- A4988 Шаговый драйвер………хороший 90…0…..…
- Arduino ……………………………………..… Amazon / Banggood
- Блок питания постоянного тока ……………………………. Амазонка / Banggood
Раскрытие информации: Это партнерские ссылки. Как партнер Amazon я зарабатываю на соответствующих покупках.
Я начал сборку, вставив два выходных подшипника в корпус. Подшипники имеют внешний диаметр 47 мм и внутренний диаметр 35 мм. Как я уже сказал, я использовал компенсацию горизонтального расширения -0,15 мм при нарезке деталей, поэтому подшипники довольно плотно вошли в корпус.
Между двумя подшипниками я поместил распорные кольца диаметром 1,5 мм, напечатанные на 3D-принтере. Для крепления подшипников к корпусу нам понадобятся шесть болтов с потайной головкой M4 длиной 25 мм. Мы также будем использовать шайбы M4, которые будут достаточно касаться внешнего кольца подшипника и, таким образом, будут удерживать подшипник в корпусе.
Для крепления подшипников к корпусу нам понадобятся шесть болтов с потайной головкой M4 длиной 25 мм. Мы также будем использовать шайбы M4, которые будут достаточно касаться внешнего кольца подшипника и, таким образом, будут удерживать подшипник в корпусе.
Далее идет сплайн Flex. Стенки чашки имеют толщину всего 1,2 мм, поэтому, несмотря на то, что она напечатана из PLA, она остается гибкой на открытом конце.
На закрытом конце шлица Flex мы можем прикрепить выходной фланец с помощью шести болтов M4. После закрепления гибкий шлиц стал немного менее гибким, чем раньше, но закрытый конец стал довольно жестким.
Далее нам нужно вставить гибкий шлиц через подшипник. Выходной фланец проходит наполовину через первый подшипник. С другой стороны мы вставим другую часть выходного фланца, которая точно поместится между двумя подшипниками.
Далее я установил четыре гайки M4 в пазы выходного вала. Эти гайки будут служить для крепления или соединения чего-либо с выходом набора шестерен.
Чтобы закончить выходной вал, поверх него я поместил еще одну часть, которая будет закрывать гайки, и, используя 4 болта M4 длиной 40 мм, я могу, наконец, соединить две части выходного вала вместе. Теперь гибкий шлиц и выходной вал могут свободно прикрепляться к корпусу.
Итак, теперь у нас есть круговой шлиц, который будет прикреплен к корпусу вместе с крышкой редуктора и креплением двигателя. Но прежде чем мы это сделаем, нам нужно собрать генератор волн. Здесь сначала нам нужно вставить две гайки М3. Эти гайки будут служить для крепления генератора волн к валу двигателя с помощью двух установочных винтов.
Теперь мы можем начать вставлять 10 подшипников на место. Здесь мы можем заметить, как подшипники немного удалены от стены небольшим краем в нижней части валов. Другая часть генератора волн также имеет такие грани, чтобы подшипники не касались стены. Мы собираемся закрепить подшипники и, собственно, весь генератор волн с помощью болтов M3 длиной 16 мм и нескольких гаек.
Далее нам нужно закрепить генератор волн на двигателе, но прежде чем мы это сделаем, нам нужно прикрепить двигатель к креплению двигателя и крышке редуктора. Генератор волн должен находиться на расстоянии 2 мм от крышки двигателя, поэтому я использовал две шайбы в качестве направляющих при установке генератора волн на место. Затем нам просто нужно затянуть установочные винты, которые расположены таким образом, чтобы до них можно было дотянуться между подшипниками.
Наконец, мы можем вставить генератор волн в гибкий сплайн и соединить все вместе. Сначала мы должны настроить гибкий сплайн так, чтобы он зацеплялся с круговым сплайном в эллиптической форме, а затем вставить генератор волн в том же направлении.
Честно говоря, сделать это может быть немного сложно, потому что мы не можем контролировать гибкую шлицевую часть из-за крепления двигателя. Я мог бы спроектировать это немного по-другому, но все же я думаю, что это достаточно хорошо для демонстрационных целей.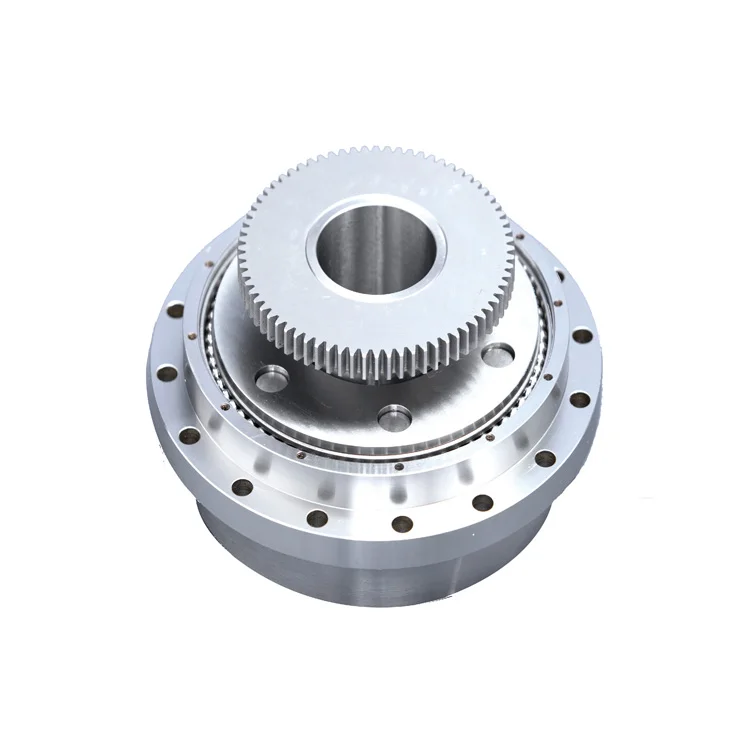
Теперь осталось вставить гайки M4 в эти гнезда корпуса и закрепить круговой шлиц и генератор волн на корпусе.
Вот и все, наш Strain Wave Gear или Harmonic Drive готов. Но когда я закончил, я подумал, что сборка комплекта шестерен, как это, довольно скучна, потому что мы не можем видеть ничего, кроме медленно вращающегося выходного вала. Там я решил заменить распечатанную на 3D-принтере крышку набора шестерен акриловой, чтобы мы также могли видеть, что происходит внутри.
У меня была акриловая пластина толщиной 4 мм, поэтому я отметил на ней форму крышки и с помощью ручной пилы грубо обрезал форму.
Затем с помощью рашпиля я отточил форму акрила. Я просверлил отверстия сверлом 3 мм, а большое отверстие для двигателя сверлом Форстнера 25 мм. В итоге форма получилась вполне приличная.
Я снова собрал двигатель и генератор волн, как показано ранее. Здесь мы можем отметить, что я добавил несколько гаек между акрилом и корпусом, чтобы получить правильное расстояние, как раньше было на крышке.
Теперь этот комплект выглядит намного круче.
Я подключил шаговый двигатель к Arduino, чтобы контролировать скорость и направление двигателя, чтобы лучше изучить и увидеть, как работает система.
Вот оно. Теперь мы можем увидеть, как работает Harmonic Drive в реальной жизни. При этом выходной вал в 35 раз медленнее входного.
Здесь я отметил один зуб гибкого шлица красным цветом, чтобы мы могли лучше отслеживать его и понимать движение гибкого шлица. Честно говоря, довольно забавно смотреть, как эта штука работает.
Однако мы заметили, что гибкая сплайн иногда дрожит или движение не такое плавное. Этому есть несколько причин. В этой конфигурации проблема в том, что я сделал акриловое крепление двигателя вручную, поэтому двигатель не установлен идеально по центру. При использовании оригинальной опоры двигателя, напечатанной на 3D-принтере, движение становится более плавным.
Мы также можем заметить, что наш Harmonic привод далек от нулевого люфта. Это из-за, как я уже говорил ранее, ограничений 3D-принтеров этого типа и того, насколько хорошо они могут печатать. Дело не только в том, насколько хорошо можно напечатать профиль зуба, но и в том, насколько точны габаритные размеры. Например, здесь я использовал изоляционную ленту на внутренней стороне льняной шлицы толщиной всего 0,18 мм, и с ней я получил лучшие результаты.
Это из-за, как я уже говорил ранее, ограничений 3D-принтеров этого типа и того, насколько хорошо они могут печатать. Дело не только в том, насколько хорошо можно напечатать профиль зуба, но и в том, насколько точны габаритные размеры. Например, здесь я использовал изоляционную ленту на внутренней стороне льняной шлицы толщиной всего 0,18 мм, и с ней я получил лучшие результаты.
Итак, я думаю, все дело в тестировании и настройке отпечатков, чтобы получить лучшие результаты. Я также пробовал печатать шестерни с модулем 1,75, но не получил хороших результатов.
На самом деле, при использовании оригинальной крышки, напечатанной на 3D-принтере, движение было более плавным, но все же недостаточно хорошим.
Я также пробовал поднимать тяжести. На расстоянии 25 см он мог поднять 1,25 кг. Это крутящий момент около 3 Нм, что как минимум в 10 раз больше, чем у этого шагового двигателя NEMA 17.
Вот и все для этого видео. Я бы только добавил, что эта система зубчатых передач может быть легко спроектирована с полым валом, что очень удобно для приложений робототехники. Так что я мог бы использовать Harmonic Drives в некоторых из моих будущих видео при создании проектов роботов.
Так что я мог бы использовать Harmonic Drives в некоторых из моих будущих видео при создании проектов роботов.
Надеюсь, вам понравилось это видео и вы узнали что-то новое. Не забудьте подписаться, а для получения дополнительных руководств и проектов посетите HowToMechatronics.com
Harmonic Drive Gearing Systems, Gearboxes, & Gearing
MOTION CONTROL AT SPEED OF TECHNOLOGY™
1.877.737.8698Валюта
USD — доллар США
- CAD — канадский доллар
877-378-0240
Свяжитесь с нами
Поиск
Поиск
Войти Свяжитесь с нами
Переключить навигацию
Harmonic Drive ® Редукторы и системы зубчатых передач Модель оснащена прецизионной волновой передачей, которая обеспечивает нулевой люфт, высокий крутящий момент, компактный размер и превосходную точность позиционирования.
Harmonic Drive
® Зубчатая передача состоит из трех частей:- Круговой шлиец — сплошное толстостенное кольцо с внутренними зубьями.
- Flexspline — тонкостенный гибкий стальной цилиндр с наружными зубьями, обработанными снаружи. Он немного меньше кругового сплайна. Количество зубьев на гибком шлице меньше, чем количество зубьев на круговом шлице (обычно на 1-2 зуба меньше).
- Генератор волн — представляет собой эллиптический кулачок, заключенный в подшипниковый узел.
Наше семейство редукторов Harmonic Drive® включает:
Корпусные быстроразъемные редукторы Подробнее
Серия HPF (планетарные редукторы с полым валом) — Прецизионная планетарная передача HPF с полым валом была разработана на основе редуктора HPG Harmonic Planetary®.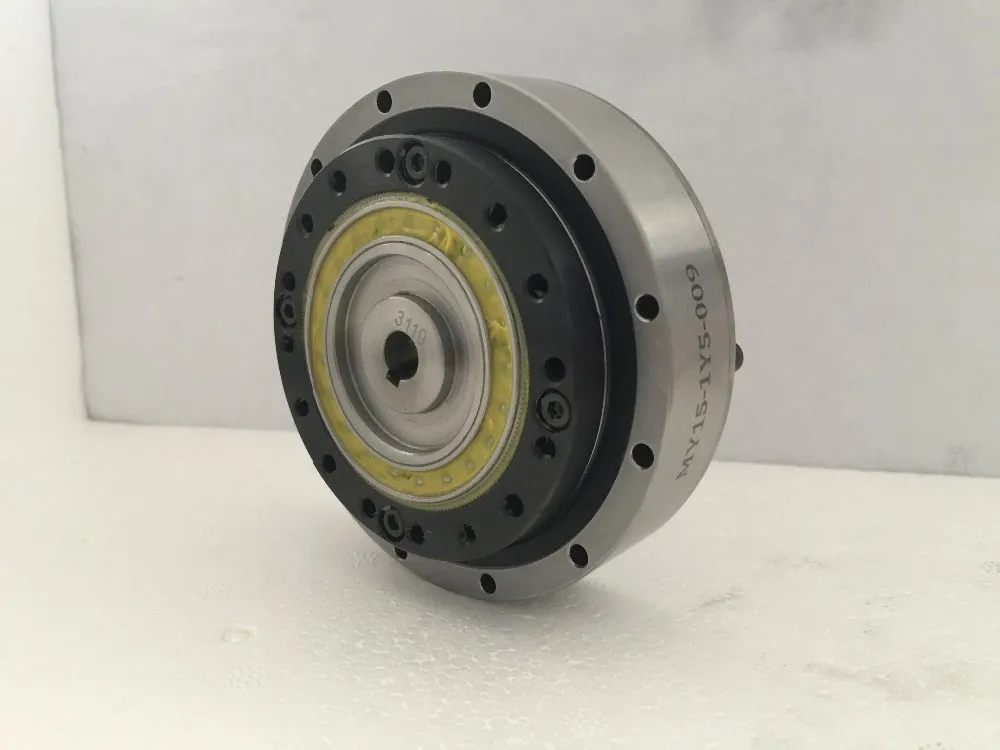 Большой коаксиальный полый вал позволяет кабелям, валам, шариковым винтам или лазерам проходить непосредственно через ось вращения. В HPF также имеется большой выходной фланец для крепления ведомой нагрузки. Этот фланец интегрирован с прочным подшипником с перекрестными роликами, который может выдерживать высокие осевые, радиальные и моментные нагрузки без необходимости в дополнительных опорных подшипниках.
Большой коаксиальный полый вал позволяет кабелям, валам, шариковым винтам или лазерам проходить непосредственно через ось вращения. В HPF также имеется большой выходной фланец для крепления ведомой нагрузки. Этот фланец интегрирован с прочным подшипником с перекрестными роликами, который может выдерживать высокие осевые, радиальные и моментные нагрузки без необходимости в дополнительных опорных подшипниках.
Серия HPG (рядные планетарные редукторы) — Планетарный редуктор Harmonic оснащен инновационной шестерней с гибким зубчатым венцом, которая автоматически регулирует люфт, обеспечивая постоянный низкий люфт на протяжении всего срока службы редуктора. По сравнению с другими планетарными конструкциями, в которых износ шестерен со временем увеличивает люфт, Harmonic Planetary поддерживает такой же низкий люфт в течение всего срока службы редуктора. Инженеру-конструктору гарантирован стабильно низкий люфт, без раздражающего смещения люфта, характерного для других конструкций.
Серия HPN — серия HPN Harmonic Planetary® Value предлагает недорогое решение без необходимости идти на компромисс в отношении качества или производительности. Серия HPN оснащена косозубыми шестернями для высокого крутящего момента, бесшумной работы и длительного срока службы. Люфт <5 угловых минут (для одной ступени) сохраняется на весь срок службы редуктора. Большие радиальные шарикоподшипники поддерживают выходной вал, обеспечивая высокую грузоподъемность. Редукторы HPN Harmonic Planetary® доступны с гладким выходным валом или валом со шпонкой и центральным отверстием с резьбой. Редукторы HPN поставляются в короткие сроки и предназначены для соединения с любым серводвигателем с помощью нашей муфты Quick Connect™.
Серия CSG-GH — Редукторы с нулевым люфтом CSG-GH Harmonic Drive® обеспечивают крутящий момент на 30 % выше, чем наши стандартные редукторы (CSF-GH), с увеличенным на 42 % сроком службы при сохранении той же высокой точности и повторяемости. В серии CSG-GH используется наш запатентованный профиль зубьев S для непревзойденной производительности. Конструкция муфты Quick Connect® позволяет легко установить любой серводвигатель.
В серии CSG-GH используется наш запатентованный профиль зубьев S для непревзойденной производительности. Конструкция муфты Quick Connect® позволяет легко установить любой серводвигатель.
Серия CSF-GH — Безлюфтовые редукторы CSF-GH Harmonic Drive® доступны с передаточным числом от 50:1 до 160:1. CSF-GH использует наш запатентованный S-образный профиль зуба, чтобы обеспечить высокий крутящий момент и высокую точность. Конструкция муфты Quick Connect® позволяет легко установить любой серводвигатель.
Серия HPG-RA (прямоугольные редукторы) — Высокоточный планетарный редуктор прямоугольной формы позволяет пользователю использовать его в ограниченном пространстве.
Серия HPGP (рядные планетарные редукторы с высоким крутящим моментом) — Harmonic Drive ® теперь предлагает НОВЫЙ высокомоментный планетарный редуктор, основанный на наших высокоточных планетарных редукторах HPG Harmonic Drive®. В серии HPGP крутящий момент выше на 33 % при сохранении высокой точности за счет использования нашей инновационной технологии зубчатого венца и высокой моментной жесткости за счет использования встроенного выходного подшипника с перекрестными роликами. Серия HPGP отличается более длительным сроком службы и позволяет использовать в вашей системе редукторы меньшего размера. Посмотрите двухминутное видео на YouTube о работе редуктора HPGP: видео HPGP на YouTube .
Серия HPGP отличается более длительным сроком службы и позволяет использовать в вашей системе редукторы меньшего размера. Посмотрите двухминутное видео на YouTube о работе редуктора HPGP: видео HPGP на YouTube .
Серия HPG-U1 — редуктор HPG Harmonic Planetary® имеет такие же высокие рабочие характеристики, как и наша стандартная серия HPG, но с входным валом для муфты вала или для использования со смещением двигателя с ременным приводом. Как и в HPG, этот редуктор включает постоянную компенсацию люфта, что обеспечивает низкий люфт на протяжении всего срока службы редуктора. Большой подшипник с перекрестными роликами служит выходным фланцем и может выдерживать большие нагрузки с высокой моментной жесткостью. Планетарные редукторы HPG доступны с фланцевым выходным валом, гладким выходным валом или валом со шпонкой и резьбовым центральным отверстием.
Серия HPG-R — редуктор HPG-R Helical Harmonic Planetary® обеспечивает высокий крутящий момент и высокую точность в компактном корпусе. Конструкция винтовой передачи сочетает бесшумную работу с более высоким крутящим моментом по сравнению со стандартной серией HPG. Редуктор имеет непрерывную компенсацию люфта, что обеспечивает низкий люфт на протяжении всего срока службы редуктора. Большой подшипник с перекрестными роликами служит выходным фланцем и может непосредственно выдерживать большие нагрузки с высокой моментной жесткостью. Планетарные редукторы HPG доступны с фланцевым выходным валом, гладким выходным валом или валом со шпонкой и резьбовым центральным отверстием.
Конструкция винтовой передачи сочетает бесшумную работу с более высоким крутящим моментом по сравнению со стандартной серией HPG. Редуктор имеет непрерывную компенсацию люфта, что обеспечивает низкий люфт на протяжении всего срока службы редуктора. Большой подшипник с перекрестными роликами служит выходным фланцем и может непосредственно выдерживать большие нагрузки с высокой моментной жесткостью. Планетарные редукторы HPG доступны с фланцевым выходным валом, гладким выходным валом или валом со шпонкой и резьбовым центральным отверстием.
Редукторы с полым валом Подробнее
Серия SHG-2UH (редукторы с полым валом) — Серия SHG-2UH представляет собой компактные редукторы с полым валом, которые имеют нулевой люфт, а также исключительную точность и повторяемость. Редуктор включает компонент редуктора Harmonic Drive ® в цельный корпус. В дополнение к полому валу редуктор также оснащен высокопроизводительным подшипником с перекрестными роликами и выходным фланцем для восприятия нагрузки без необходимости использования дополнительных опорных подшипников. Для дополнительных версий входного вала см. серию SHG-2UJ.
Для дополнительных версий входного вала см. серию SHG-2UJ.
Серия SHF-2UH (редукторы с полым валом) — Серия SHF-2UH представляет собой компактные редукторы с полым валом, которые имеют нулевой люфт, а также исключительную точность и повторяемость. Редуктор включает компонент редуктора Harmonic Drive ® в цельный корпус. В дополнение к полому валу редуктор также оснащен высокопроизводительным подшипником с перекрестными роликами и выходным фланцем для восприятия нагрузки без необходимости использования дополнительных опорных подшипников. Для дополнительных версий входного вала см. серию SHF-2UJ.
Серия SHD-2UH-LW (редукторы с полым валом) — Серия SHD-2UH-LW была разработана как самая компактная и легкая прецизионная передача с полым валом, доступная сегодня на рынке. Основанный на проверенной надежности наших комплектов компонентов SHD, этот редуктор отличается нулевым люфтом, исключительной точностью позиционирования и повторяемостью. Редуктор включает компонент редуктора Harmonic Drive ® в алюминиевом корпусе. Редуктор также оснащен подшипником с перекрестными роликами высокой грузоподъемности и выходным фланцем для установки движущейся нагрузки без необходимости использования дополнительных опорных подшипников. Широкий полый вал позволяет кабелям, валам или трубам проходить непосредственно через ось вращения.
Редуктор включает компонент редуктора Harmonic Drive ® в алюминиевом корпусе. Редуктор также оснащен подшипником с перекрестными роликами высокой грузоподъемности и выходным фланцем для установки движущейся нагрузки без необходимости использования дополнительных опорных подшипников. Широкий полый вал позволяет кабелям, валам или трубам проходить непосредственно через ось вращения.
SHF-2SH (редукторы с полым валом) — SHF-2SH представляет собой простой редуктор с полым первичным валом. Он стоит меньше, чем полный блок, и отличается невероятно гибкой конструкцией. SHF-2SH доступны в девяти типоразмерах с передаточными числами от 30:1 до 160:1 и максимальным крутящим моментом в диапазоне 9-1840 Нм.
Компактные моноблочные редукторы Подробнее
Серия CSG-2UH — Harmonic Drive ® Редукторы серии CSG представляют собой улучшенные версии редукторов серии CSF с высоким крутящим моментом. Номинальный крутящий момент, срок службы и надежность значительно улучшены по сравнению с продуктами серии CSF того же размера.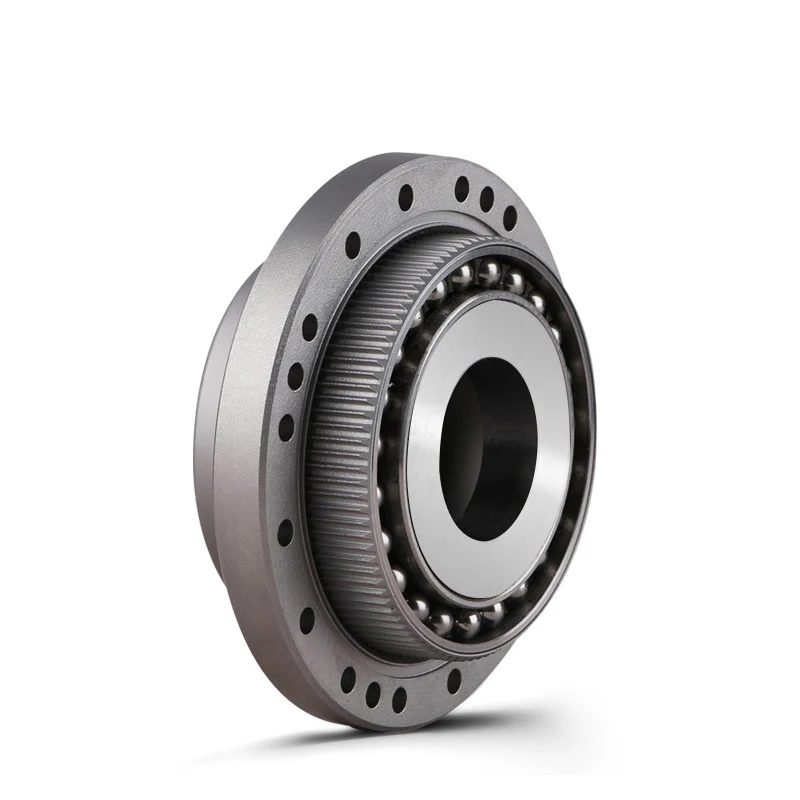
Серия CSF-2UH — Серия CSF-2UH представляет собой компактный прецизионный редуктор с нулевым люфтом, а также исключительной точностью и повторяемостью. Редуктор включает компонент редуктора Harmonic Drive ® в цельный корпус. Редуктор также оснащен подшипником с перекрестными роликами высокой грузоподъемности и выходным фланцем для поддержки нагрузки.
Мини-редукторы CSF-2UP идеально подходят для небольших роботов или оборудования, требующего сверхкомпактного решения. Эти новые модели легкие и чрезвычайно плоские. Благодаря перекрестному роликоподшипнику, используемому на выходном фланце, редукторы CSF-2UP обладают высокой моментной жесткостью.
Серия CSF-2XH — этот редуктор предназначен для прямого соединения с серводвигателем. Вал двигателя крепится непосредственно к входному элементу редуктора. Выход редуктора представляет собой вал или фланец.
CSF-1U-CC Серия — Этот редуктор предназначен для прямого соединения с небольшим высокопроизводительным серводвигателем. Выходом редуктора является вал. Для дополнительных версий входного вала см. серию CSF-1U.
Выходом редуктора является вал. Для дополнительных версий входного вала см. серию CSF-1U.
CSF-1U-CC-F Серия — Этот редуктор предназначен для прямого соединения с небольшим высокопроизводительным серводвигателем. Выход редуктора представляет собой фланец. Для дополнительных версий входного вала см. серию CSF-1U-F.
Ультраплоские серии CSD и SHD
Серия CSD (встроенный выходной подшипник) — В центре внимания современных средств массовой информации человекоподобные роботы и аэрокосмическая область требуют предельного «легкого веса», жидкокристаллических и полу- Оборудование для производства проводников требовало сверхтонкой формы по сравнению с ограничениями по высоте системной линии. Серия CSD, отличающаяся малым весом и компактностью, унаследовала превосходные характеристики Harmonic Drive 9.0364 ® прецизионный волновой редуктор, который удовлетворил рыночный спрос и достиг смелой формы.
Серия SHD (встроенный выходной подшипник) — Harmonic Drive ® Редукторы серии SHD унаследовали превосходные характеристики редукторов серии SHF/SHG. В серии SHD плоскостность снижена до минимального уровня 17,5 мм без потери высокого крутящего момента. Это простой тип агрегата со встроенным поперечным роликоподшипником высокой жесткости на выходе для восприятия осевых нагрузок. Он лучше всего подходит для приложений, требующих компактного дизайна.
В серии SHD плоскостность снижена до минимального уровня 17,5 мм без потери высокого крутящего момента. Это простой тип агрегата со встроенным поперечным роликоподшипником высокой жесткости на выходе для восприятия осевых нагрузок. Он лучше всего подходит для приложений, требующих компактного дизайна.
Редукторы с фазовой регулировкой Подробнее
Редукторы HDI представляют собой редукторы, устанавливаемые на валу. Они обеспечивают ручную регулировку точной статической фазы. На вращающихся валах HDI действует как жесткая муфта вала. Регулировка фазы выполняется, когда система привода остановлена. Регулировка производится вручную в любом направлении путем регулировки наружного кольца с накаткой, обеспечивающего бесступенчатую регулировку относительного вращения ступиц с передаточным числом 100:1. При фиксированной ступице «D» вращение ступицы «S» противоположно направлению вращения гайки. При фиксированной ступице «S» вращение на ступице «D» происходит в том же направлении, что и гайка. Индексаторы Infinit доступны в 6 размерах и имеют номинальный крутящий момент от 500 до 20 000 дюймо-фунтов.
Индексаторы Infinit доступны в 6 размерах и имеют номинальный крутящий момент от 500 до 20 000 дюймо-фунтов.
Таблица выбора редуктора Подробнее
Позиции 1-30 из 890
Показывать
30 60 100 Все
на страницу
Сортировать по Должность наименование товара Цена Установить нисходящее направление
Позиции 1-30 из 890
Показывать
30 60 100 Все
на страницу
Сортировать по Должность наименование товара Цена Установить нисходящее направление
Узнайте больше, просмотрев 3-минутное видео на YouTube о работе Harmonic Drive Gearing: Harmonic Drive Gearing YouTube Video
Leaderdrive: лидеры в области гармонических передач
Leaderdrive: лидеры в области гармонических передачО компании Leaderdrive
Leaderdrive — высокотехнологичное предприятие, специализирующееся на исследованиях и разработках, а также на разработке и производстве гармонических зубчатых передач для точного перемещения и позиционирования в автоматизированных машинах. В первую очередь мы разрабатываем и производим гармонические редукторы скорости с волновым редуктором, поворотные приводы, бескаркасные моментные двигатели с прямым приводом и прецизионные обрабатывающие столы.
В первую очередь мы разрабатываем и производим гармонические редукторы скорости с волновым редуктором, поворотные приводы, бескаркасные моментные двигатели с прямым приводом и прецизионные обрабатывающие столы.
Продукция Leaderdrive широко используется в промышленных роботах, аэрокосмической отрасли, оборудовании для производства полупроводников и в других высокотехнологичных областях производства. После нескольких лет непрерывных исследований компания Leaderdrive стала лидером в крупномасштабном применении волновых редукторов гармонических скоростей в Китае. С тех пор мы расширили наше внимание на мировой рынок.
Наша миссия — оставаться в авангарде технологий гармонических зубчатых передач в отрасли автоматизации. Мы хотим сотрудничать с отраслевыми и институциональными лидерами, чтобы наши продукты продолжали удовлетворять потребности изобретателей, новаторов и пионеров автоматизации.
Наша продукция
Здесь представлена основная линейка продукции Leaderdrive: волновые редукторы, поворотные приводы, бескаркасные двигатели и поворотные столы.
Волновые шестерни деформации
Волновой редуктор, также известный как «гармонический привод», представляет собой компактный, легкий и безлюфтовый компонент зубчатой передачи. Это незаменимый компонент для надежной и точной работы легких промышленных роботов и манипуляторов, особенно в качестве редуктора. Leaderdrive является ведущим производителем волновых редукторов; у нас есть сильный отдел исследований и разработок, и мы производим системы гармонического привода по индивидуальному заказу для промышленных и академических партнеров.
Поворотные приводы
Интеллектуальные поворотные приводы Leaderdrive представляют собой высокоинтегрированное, высокоточное решение для индексации среднего и высокого уровня электроприводов, предоставляющее клиентам лучшее решение для точного управления движением и позиционированием. Мы интегрируем наши гармонические редукторы скорости тензоволнового редуктора, чтобы еще больше повысить точность наших поворотных приводов. Наша постоянная разработка инновационных новых технологий означает, что наши поворотные приводы будут улучшаться год от года и лидировать на рынке. Наша текущая модель поворотного привода с полым валом KAH имеет точность до 10 угловых секунд с крутящим моментом до 800 Нм. Мы приветствуем запросы от представителей промышленности и научных кругов, заинтересованных во внедрении поворотных приводов Leaderdrive, для связи с нашей технической командой; мы можем предоставить нестандартные детали для различных приложений..
Бескаркасные моментные двигатели с прямым приводом
Бескорпусные моментные двигатели с прямым приводом представляют собой усовершенствованные решения для робототехники и конкретных областей автоматизации, таких как центрифуги. . . Интеллектуальные бескаркасные моментные двигатели с прямым приводом Leaderdrive отличаются ультраплоскими размерами и сверхвысокой удельной мощностью. Они содержат неодимовые магниты для безызносного и бесшумного перемещения элементов статора и ротора. Свяжитесь с Leaderdrive, чтобы узнать больше о бескаркасных моментных двигателях с прямым приводом. У нас есть опытная команда технических специалистов, которые могут адаптировать существующие конструкции моделей для конкретных применений..
Поворотные столы
Интеллектуальные поворотные столы с ЧПУ Leaderdrive предназначены для пользователей высокоточных станков. Мы используем наши инновационные инструменты для точного позиционирования, такие как наши редукторы скорости волны третьей гармоники, чтобы гарантировать, что наши поворотные столы используют передовые технологии в отрасли. Благодаря компактным размерам, высокому крутящему моменту, высокой жесткости и идеальной точности обработки рычажных механизмов на поворотные столы Leaderdrive можно положиться при изготовлении обрабатываемых деталей высочайшего качества. Свяжитесь с Leaderdrive, чтобы узнать больше о запатентованных решениях третьей гармоники для ЧПУ и поворотных столов с ЧПУ. Мы уверены, что можем предоставить лучшие решения для высокотехнологичного интеллектуального производства. .
Технологические приложения
Технология Leaderdrive используется в различных отраслях промышленности, от промышленной робототехники до аэрокосмической.
Аэрокосмическая робототехника
Для аэрокосмических передающих устройств требуется простая конструкция, которая может адаптироваться к суровым космическим условиям. В связи с этим конструкция гармонических редукторов волновых редукторов для аэрокосмической отрасли проста. После специальной обработки стандартные модели зубчатых передач могут быть применены для управления солнечными панелями спутниковых крыльев, устройств слежения с различными наклонно-поворотными движениями и управления беспилотными транспортными средствами. Направленная исследованиями разработка компанией Leaderdrive волновых зубчатых передач и технологии поворотных приводов означает, что мы располагаем уникальными возможностями для предоставления решений для амбициозных проектов зубчатых передач. Для получения дополнительной информации о разработке аэрокосмического оборудования свяжитесь с нашей технической командой сегодня.
Автоматизированное упаковочное оборудование
Шестерни трансмиссии автоматизированного упаковочного оборудования требуют высокой точности и высокой скорости. Погрузочно-разгрузочные роботы, запайщики и другое оборудование должны быть синхронизированы и управляться косвенно. К точности приводной системы предъявляются строгие требования. Высокоточный гармонический редуктор тензометрической передачи значительно повысит точность системы передачи и повысит эффективность производства оборудования. Компания Leaderdrive является всемирно известным производителем высокоточных редукторов гармонических колебаний. Мы рады помочь в разработке и сборке автоматизированного упаковочного оборудования, поэтому не стесняйтесь обращаться к нашей технической команде сегодня.
Технология промышленной лазерной резки
Промышленному оборудованию для лазерной резки требуется интегрированный модуль с высокой точностью и высокой скоростью. Высокое качество, требуемое заказчиками услуг лазерной резки, означает, что поверхности материалов должны быть гладкими и без заусенцев. Кроме того, поставщики услуг хотят повышения эффективности, низкого потребления, энергосберегающей работы и защиты окружающей среды. В настоящее время основным оборудованием для промышленной лазерной резки являются машины для лазерной маркировки, машины для лазерной сварки и машины для лазерной резки. Высокоточный гармонический редуктор с зубчатой передачей имеет высокую точность, малый размер и высокий крутящий момент и широко используется в этом оборудовании. Leaderdrive является ведущим производителем гармонических редукторов волновых редукторов. Пожалуйста, свяжитесь с нами, чтобы узнать больше о том, как вы можете использовать наши решения для технологии промышленной лазерной резки.
Компоненты автоматизации промышленных роботов
В начале 20 века промышленные роботы стали популярны на заводах по всему миру, особенно в автомобильной промышленности. С непрерывным развитием индустрии роботов легкие роботы постепенно перемещаются в заводские цеха каждой отрасли. Однако оригинальные редукторы RV, используемые традиционными большими роботами, постепенно становятся неадекватными, поскольку они не могут удовлетворить потребности современных легких роботов. Компоненты нового поколения, производимые такими компаниями, как Leaderdrive, начали вытеснять старые механизмы для автодомов. . . Детали сборки машин, такие как зубчатые передачи, поворотные приводы и бескаркасные двигатели, составляют основные компоненты промышленных роботов. Эти детали помогают инженерам-технологам реализовать идеальные функции движения, не испытывая таких проблем, как люфт и механический износ. Точность, обеспечиваемая зубчатыми передачами и поворотными приводами, означает, что современные промышленные роботы могут выполнять все более точные действия на микроуровне. Ассортимент продукции Leaderdrive отвечает требованиям современной промышленной робототехники. Высокоточные редукторы волновых редукторов и поворотные приводы могут широко использоваться в многошарнирных роботах, SCARA, коллаборативных роботах и параллельных роботах. Свяжитесь с нами, чтобы узнать больше о наших решениях для промышленных роботов.
Интеллектуальное роботизированное медицинское оборудование
Интеллектуальное роботизированное медицинское оборудование — это революционная область, которая интегрирует современные высокотехнологичные средства в стандартную медицинскую практику. К таким устройствам предъявляются невероятно высокие требования к точности компонентов зубчатой передачи, таких как гармонические редукторы тензометрической передачи… Leaderdrive вносит свой вклад в интеллектуальные медицинские устройства, такие как хирургические роботы, реабилитационные роботы и носимые роботы. Эти устройства обладают высокой гибкостью, высокой безопасностью и требованиями к точному управлению. Наши прецизионные гармонические редукторы компактны, легки и высокоточны и могут полностью удовлетворить потребности интеллектуальных медицинских устройств.
Измерительное, аналитическое и испытательное оборудование
В связи с непрерывным развитием обработки, производства и производства требования к анализу и проверке производственной продукции постоянно улучшаются, а также постоянно улучшаются требования к точности измерения, анализа и испытательного оборудования. Естественно, качество измерительного, аналитического и испытательного оборудования зависит от точности компонентов, таких как редукторы гармонических колебаний, поворотные приводы и бескаркасные приводные двигатели. .. Гармонические редукторы Leaderdrive компактны, легки и обладают высокой точностью; они широко используются в деликатном анализе и испытательном оборудовании. Основными приложениями являются управление устройствами оптического анализа, трехкоординатными измерительными приборами и машинами для испытаний металлов на растяжение. Другие детали, такие как делительно-поворотный стол и трансмиссия токарного станка, также используют эти компоненты. Свяжитесь с Leaderdrive, чтобы узнать больше о том, как наша продукция может использоваться в измерительном, аналитическом и испытательном оборудовании.
Центр новостей Leaderdrive
Будьте в курсе последних событий и новостей Leaderdrive.
Роторный ротор с полым валом серии Leaderdrive KAH…
20.04.2021
7 апреля состоится «OFweek 2021 (Десятая) Китайская конференция робототехники и ежегодная церемония награждения Wiko Cup», организованная представителями индустрии высоких технологий…
Подробнее
Г-н Хоу Вейгуй, основатель ZTE Corporation,.
..07.04.2021
Утром 6 апреля г-н Хоу Вейгуй, основатель ZTE Corporation, и г-жа Фан Жун, заместитель генерального директора ZTE Corporation, г-н Цай…
Детали
Leaderdrive участвует в ITES Shenzhen…
31.03.2021
Компания Leaderdrive примет участие в выставке ITES Shenzhen International Industrial Manufacturing Technology и SIMM Shenzhen Machinery…
Подробнее
Связаться с Leaderdrive
Если вы хотите узнать больше о наших продуктах, пожалуйста, свяжитесь с нами для получения более подробной информации, чтобы мы могли предоставить вам подходящее решение.
Лидер Harmonious Drive Systems Co., Ltd
No.19, Muxu West Road,
Wuzhong District, Suzhou City 215101,
Jiangsu Province, P.R. China
Tel: +0086-512-66362298/0086-512-66560692
E-mail: marketing@leader@driver. ком
патентов, переданных компании Harmonic Drive Systems, Inc.
патентов, переданных компании Harmonic Drive Systems, Inc.
ПЛОСКАЯ ВОЛНОВАЯ ПЕРЕДАЧА
Номер публикации: 202202
Реферат: Плоская волновая передача снабжена аксиально расположенными жесткой передачей, гибкой передачей и генератором волн. Гибкое зубчатое колесо имеет форму плоского усеченного конуса, имеет зубчатую часть, соединенную через гофрированную диафрагму поперечного сечения с жесткой бобышкой, которая является соединительной частью выходного вала. Зубчатое зацепление с плоской волной деформации может обеспечить осевую гибкость зубчатой части и может обеспечить благоприятное зацепление зубьев гибкого зубчатого колеса с зубьями жесткого зубчатого колеса в осевом направлении в каждом положении в направлении следа зуба. Локальное смещение крутящего момента нагрузки в части зацепления в части формирования зуба также может быть подавлено.

Тип: Заявка
Подано: 27 сентября 2019 г.
Дата публикации: 15 сентября 2022 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатель: Масару КОБАЯСИ
Механизм передачи вращения с волновой передачей
Номер патента: 11441650
Реферат: В механизме передачи вращения, который передает вращательную движущую силу двигателя на элемент со стороны нагрузки через редуктор скорости, волновая передача используется в качестве редуктора скорости, и допустимый крутящий момент нагрузки элементов трансмиссии, кроме волновой передачи, превышает заданный верхний предел крутящего момента нагрузки.
Допустимый крутящий момент нагрузки волновой передачи определяется крутящим моментом храпового механизма, который устанавливается таким образом, чтобы не превышать верхний предел крутящего момента нагрузки. В состоянии перегрузки в волновой передаче возникает храповой механизм, так что волновая передача действует как механический предохранитель. Другие элементы передачи мощности могут быть защищены от состояния перегрузки без добавления отдельного элемента, такого как ограничитель крутящего момента.Тип: Грант
Подано: 21 октября 2020 г.
Дата патента: 13 сентября 2022 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Джун Ханда, Хироаки Кимура, Сотаро Мияке
Полое волновое зубчатое устройство
Номер патента: 11441660
Реферат: Полое волновое зубчатое устройство (1) имеет генератор волн (5), вилка генератора волн (5а) которого выполнена за одно целое с частью полого вращающегося вал (6).
Усиливающая часть (5d) плунжера, примыкающая к плунжеру (5а) генератора волн, имеет большую толщину, чем толщина плунжера (5а) генератора волн, и выполнена за одно целое с полым вращающимся валом (6). Заглушка (5а) генератора волн усилена очень жесткой усиливающей частью (5d) заглушки, расположенной рядом с заглушкой (5а) генератора волн. Таким образом, можно предотвратить или подавить снижение жесткости заглушки (5а) генератора волн, когда полый вращающийся вал имеет небольшую толщину, чтобы уменьшить вес полого вращающегося вала (6) и увеличить диаметр полого вращающегося вала. его полая часть. Следовательно, можно подавить снижение крутящего момента храпового механизма.Тип: Грант
Подано: 19 июня 2018 г.
Дата патента: 13 сентября 2022 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Ютака Миядзава, Нобору Такидзава
ПОВОРОТНЫЙ ПРИВОД
Номер публикации: 20220255400
Резюме: Поворотный привод включает в себя двигатель PWB и волновой редуктор. Двигатель PWB представляет собой двигатель с осевым зазором. Ротор двигателя в двигателе PWB включает диск ротора, соосно прикрепленный к полому валу двигателя, и магнит ротора, прикрепленный к диску ротора. Статор двигателя состоит из печатной монтажной платы и включает в себя изолирующую подложку и катушку двигателя, определяемую печатной разводкой, сформированной на изолирующей подложке. По сравнению с обычным поворотным приводом, использующим двигатель SPM и т.
п., длина вала может быть укорочена, а диаметр его полости может быть увеличен.Тип: Заявка
Подано: 27 июля 2020 г.
Дата публикации: 11 августа 2022 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатель: Тору ТАКЕДА
Механизм передачи вращения с волновой передачей
Номер патента: 113
Реферат: В механизме передачи вращения, который передает вращательную движущую силу двигателя на элемент со стороны нагрузки через редуктор скорости, волновая передача используется в качестве редуктора скорости, и допустимый крутящий момент нагрузки элементов трансмиссии, кроме волновой передачи, превышает заданный верхний предел крутящего момента нагрузки.
Допустимый крутящий момент нагрузки волновой передачи определяется крутящим моментом храпового механизма, который устанавливается таким образом, чтобы не превышать верхний предел крутящего момента нагрузки. В состоянии перегрузки в волновой передаче возникает храповой механизм, так что волновая передача действует как механический предохранитель. Другие элементы передачи мощности могут быть защищены от состояния перегрузки без добавления отдельного элемента, такого как ограничитель крутящего момента.Тип: Грант
Подано: 21 октября 2020 г.
Дата патента: 19 июля 2022 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Джун Ханда, Хироаки Кимура, Сотаро Мияке
ПЛАНЕТАРНЫЙ РЕДУКТОР
Номер публикации: 20220213947
Реферат: Планетарный редуктор с косозубым зубчатым колесом устроен так, что солнечная шестерня задней ступени поддерживается с возможностью вращения корпусом устройства через радиальный подшипник с одной стороны в направлении центральной оси и поддерживается с возможностью вращения водилом планетарной передачи задней ступени через упорный подшипник с другой стороны.
Водило задней ступени планетарной передачи поддерживается с возможностью вращения корпусом устройства через подшипник водила задней ступени. Преднатяг прикладывается к упорному подшипнику с помощью механизма предварительного натяга, установленного на водиле планетарной передачи задней ступени. Смещение солнечной шестерни задней ступени, вызванное осевой силой, возникающей из-за зацепления с планетарной передачей задней ступени, может быть подавлено, и угловая ошибка между вращением на входе и вращением на выходе может быть подавлена.Тип: Заявка
Подано: 25 июля 2019 г.
Дата публикации: 7 июля 2022 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Кохей ИСОБЕ, Кента ТАКАХАСИ
Двойной абсолютный энкодер
Номер патента: 11359938
Резюме: Примерный узел кодера включает в себя подложку, первый кодер и второй кодер.
Подложка имеет два или более датчиков положения, причем каждый датчик положения сконфигурирован для определения положения вращения вала или другого вращающегося элемента машины. Первый датчик положения включает в себя по меньшей мере один первый датчик положения из двух или более датчиков положения. По меньшей мере один первый датчик положения расположен на подложке для внеосевого совмещения с валом или другим вращающимся элементом машины. Второй датчик положения включает в себя второй датчик положения из двух или более датчиков положения, причем второй датчик положения расположен на подложке для осевого или внеосевого совмещения с валом или другим вращающимся элементом машины. Каждый датчик положения сконфигурирован для обнаружения разных или общих типов сигналов, а тип сигнала второго датчика положения исключает оптические сигналы.Тип: Грант
Подано: 4 июня 2021 г.
Дата патента: 14 июня 2022 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Брайан Койн, Юки Като
Волновая передача блочной конструкции
Номер патента: 11320034
Реферат: Чашечно-волновая передача, имеющая блочную конструкцию и имеющая: неподвижную часть, включающую в себя корпус блока и шестерню с внутренним зацеплением; часть ведущей стороны, включающая в себя выходной элемент и шестерню с внешним зацеплением; и подшипник скольжения, поддерживающий часть неподвижной стороны и часть приводной стороны в радиальном направлении и направлении осевого усилия в состоянии, в котором возможно относительное вращение.
Подшипник скольжения имеет цилиндрическую втулку, размещенную в радиальном зазоре, и кольцевые втулки, размещенные соответственно в упорных зазорах. Таким образом, можно создать предпочтительную волновую передачу, имеющую более легкую и компактную конструкцию узла, чем когда используется подшипник качения.Тип: Грант
Подано: 31 октября 2017 г.
Дата патента: 3 мая 2022 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Ёсихидэ Киосава, Норио Широкоши
Способ смазывания волновых передач
Номер патента: 11320041
Резюме: Когда волновая передача используется в приложении для операции повторяющегося пуска/останова, часть смазки с внешней стороны и часть смазки с внутренней стороны, которые смазываются с помощью различные типы смазки остаются в сообщающемся состоянии, не разделяясь при помощи уплотняющего элемента и т.
п. Смазочная часть с внешней стороны снабжена гораздо меньшим количеством смазки, чем то количество, которое потребовалось бы при использовании в таких условиях, как устойчивая работа. Точно так же смазочная часть внутренней стороны также снабжена гораздо меньшим количеством смазки, чем то количество, которое потребовалось бы при использовании в таких условиях, как устойчивая работа. По существу, смазочная часть внешней стороны и смазочная часть внутренней стороны могут быть надлежащим образом смазаны с использованием различных типов смазки без смешивания смазки.Тип: Грант
Подано: 9 ноября 2018 г.
Дата патента: 3 мая 2022 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатель: Норио Широкоши
Волновая передача двойного типа
Номер патента: 11280370
Реферат: Зубчатое колесо с внешним зацеплением двойного типа тензоволновой передачи снабжено первым и вторым наружными зубьями, имеющими разное число зубьев, и зазором, образованным между этими зубьями в качестве зазора резца.
для зуборезов. Где L1 — максимальная ширина зазора, t1 — глубина от вершины первого наружного зуба до самой глубокой части зазора, h2 — глубина первого наружного зуба, t2 — глубина от зуба вершины второго наружного зуба до самой глубокой части, а h3 — глубина второго наружного зуба, выполняется любое из следующих условий 1-3: L1=0,1L?0,35L, t1=0,9h2?1.3h2 и t2=0.3h3?0.9h3??Условие 1: L1=0.1L?0.35L, t1=0.3h2?0.9h2, и t2=0.9h3?1.3h3??Условие 2: L1=0.1 L?0,35L, t1=0,3h2?0,9h2 и t2=0,3h3?0,9h3??Условие 3: Можно получить волновую передачу двойного типа, в которой повышены износостойкость и усталостная прочность основания зуба.Тип: Грант
Подано: 30 августа 2018 г.
Дата патента: 22 марта 2022 г.
Правопреемник: Harmonic Drive Systems Inc.
Изобретатели: Хироаки Кимура, Джун Ханда
ОПТИЧЕСКИЙ ПОВОРОТНЫЙ ЭНКОДЕР, СЕРВОМОТОР И ПРИВОД
Номер публикации: 20220065667
Abstract: В этом оптическом поворотном энкодере дорожки обнаружения вращающегося диска облучаются светом обнаружения, излучаемым светоизлучающим элементом. Оптический сигнал, полученный через щели в дорожках детектирования, проходит через рисунок щелей в неподвижной щелевой пластине и принимается светоприемными поверхностями светоприемного элемента. Рисунок щелей в неподвижной щелевой пластине сформирован таким образом, чтобы соответствовать диапазону эффективного пятна детекторного света.
Можно использовать светодиод или другой светоизлучающий элемент с малым эффективным диаметром пятна, что выгодно с точки зрения снижения затрат и большей компактности устройства.Тип: Заявка
Подано: 15 марта 2019 г.
Дата публикации: 3 марта 2022 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Синтаро УЭНО, Ёсинори СИБАХАРА, Садахару КАНАМОРИ
ВОЛНОВАЯ ПЕРЕДАЧА
Номер публикации: 20210404544
Реферат: Волновой редуктор имеет корпус агрегата, волновую передачу и подшипниковое устройство.
Шарики опорной части подшипникового устройства расположены на диаметрально внешней стороне по отношению к цилиндрической бочкообразной части шестерни с внешним зацеплением. Диаметр S шариков составляет от 0,05 до 0,15 делительного диаметра D зубчатого колеса с внешним зацеплением. Центры шариков расположены между точкой на расстоянии 1,2 диаметра S в сторону цилиндрической части ствола от внутренней торцевой поверхности диафрагмы вдоль центральной оси и точкой на расстоянии 1 диаметр S в сторону, противоположную цилиндрической части ствола от внутренней торцевой поверхности. Подшипниковое устройство может быть сконфигурировано для использования совместно с волновыми редукторами, имеющими различную осевую длину.Тип: Заявка
Подано: 4 марта 2021 г.
Дата публикации: 30 декабря 2021 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Хироаки КИМУРА, Ёсихидэ КИЙОСАВА, июнь ХАНДА
БЛОЧНОЕ УСТРОЙСТВО ПЕРЕДАЧИ ВОЛН ДЕФОРМАЦИОННОГО ТИПА
Номер публикации: 20210396303
Abstract: Устройство волновой передачи единичного типа, снабженное подшипником с перекрестными роликами, который поддерживает шестерню с внутренним зацеплением и шестерню с внешним зацеплением в состоянии, в котором обе шестерни могут вращаться относительно друг друга. другой, и секция зацепления обеих шестерен смазывается консистентной смазкой.
Между внутренним кольцом подшипника с перекрестными роликами и внешним зубчатым колесом образуется зазор, посредством которого взаимодействуют секция зацепления и канавка дорожки качения подшипника с перекрестными роликами. Благодаря насосному эффекту, вызванному отклонением внешней шестерни, смазка выталкивается из зацепления в зазор. Некоторое количество смазки возвращается во внутреннее пространство шестерни с внешним зацеплением через отверстие для подачи смазки, проходящее через диафрагму шестерни с внешним зацеплением. Таким образом, можно контролировать утечку смазки из сальника поперечного роликоподшипника в сторону агрегата.Тип: Заявка
Подано: 16 ноября 2018 г.
Дата публикации: 23 декабря 2021 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатель: Наоки КАНАЯМА
ГЕНЕРАТОР ВОЛН ДЕФОРМАЦИИ УСТРОЙСТВО ПЕРЕДАЧИ
Номер публикации: 20210372515
Abstract: Схема смазочных канавок наружного кольца, сформированная на поверхности дорожек качения наружного кольца, и схема смазочных канавок внутреннего кольца, сформированная на поверхности дорожек качения внутреннего кольца подшипника генератора волн Устройство волновой передачи представляет собой модели, в которых линейные смазочные канавки, имеющие очень малую ширину и глубину в несколько микрометров или меньше, расположены с мелким шагом в несколько микрометров или меньше. Рисунок смазочных канавок внутренней дорожки качения включает в себя второй рисунок канавок, образованный на участках поверхности дорожек качения внутреннего кольца со стороны длинной оси для удерживания смазки, и первый рисунок канавок, образованный на участках поверхности дорожек качения внутреннего кольца со стороны короткой оси для удерживания смазку и направьте смазку ко второму рисунку канавок.
Эта конфигурация улучшает состояние контакта между шариками и поверхностями дорожек качения внутренней и внешней дорожки качения подшипника генератора волн, тем самым уменьшая коэффициент трения между ними.Тип: Заявка
Подано: 22 ноября 2018 г.
Дата публикации: 2 декабря 2021 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Дайсуке ОРИИ, Сюхей КОБАЯСИ, Норио ШИРОКОСИ, Хироси ЯМАДЗАКИ
ВОЛНОВАЯ ПЕРЕДАЧА
Номер публикации: 20210364077
Abstract: Контуры профиля зуба жесткой шестерни с внутренним зацеплением и гибкой шестерни с внешним зацеплением в этой волновой передаче обусловлены: частями зацепления, каждая из которых входит в зацепление с противоположной шестерней; части выпуклой поверхности со стороны гребня зуба, которые, соответственно, плавно соединены с концами зацепляющих частей со стороны придатка и проходят от указанных концов к вершинам гребня зуба; и участки вогнутой поверхности со стороны нижней части зуба, которые, соответственно, плавно соединены с концами зацепляемых частей со стороны нижней части зуба и проходят от указанных концов к самым глубоким частям основания зуба.
Участки зацепления и участки выпуклой поверхности со стороны гребня зуба представляют собой обработанные участки, которые одновременно обрабатываются путем нарезания верхнего зубчатого колеса, и на зубьях любого зубчатого колеса со стороны гребня зуба нет кромок.Тип: Заявка
Подано: 14 мая 2018 г.
Дата публикации: 25 ноября 2021 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Норио ШИРОКОШИ, Такео КОДАИРА, Хироси ЯМАДЗАКИ
Волновая передача единичного типа
Номер патента: 11168775
Реферат: В единичной волновой передаче вращающийся лонжерон, состоящий из второй шестерни с внутренним зацеплением и выходного вала, опирается на первый подшипник скольжения и второй подшипник скольжения на неподвижном боковом элементе с возможностью относительного вращения, при этом неподвижный боковой элемент состоит из корпуса блока и первой шестерни с внутренним зацеплением.
Поверхности подшипника скольжения первого подшипника скольжения и поверхности подшипника скольжения второго подшипника скольжения определяются конической поверхностью, имеющей линию центральной оси в качестве центральной линии. Можно реализовать волновую передачу блочного типа, которая выгоднее сделать меньше и компактнее, чем когда используется роликовый подшипник. Также легче регулировать зазор между поверхностями подшипника скольжения, поскольку устраняется радиальный подшипник скольжения, не имеющий функции регулировки радиального зазора.Тип: Грант
Подано: 20 сентября 2018 г.
Дата патента: 9 ноября 2021 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Ёсихидэ Киосава, Норио Широкоши
ВОЛНОВОЕ ПЕРЕДАЧНОЕ УСТРОЙСТВО
Номер публикации: 20210341048
Abstract: В волновом зубчатом зацеплении мелкие первая и вторая смазочно-удерживающие канавки для удерживания смазочного материала выполнены с малым шагом на наружной периферийной поверхности дорожки качения подшипника волнового генератора и часть внутренней периферийной поверхности зубчатого колеса с внешним зацеплением, контактирующая с внешней обоймой, находящаяся в контакте с ней.
Мелкие направляющие смазочные канавки для направления смазки к части внутренней периферийной поверхности, контактирующей с наружной дорожкой дорожки качения, образованы с мелким шагом на второй части внутренней периферийной поверхности, которая примыкает к участку внутренней периферийной поверхности, контактирующей с внешней дорожкой внутренней периферийной поверхности. Поверхность шестерни с внешним зацеплением. Эта конфигурация улучшает состояние контакта между частью внутренней периферийной поверхности, контактирующей с наружным кольцом, зубчатого колеса с внешним зацеплением, и внешней периферийной поверхностью наружного кольца, тем самым подавляя фреттинг-износ, возникающий на этих поверхностях.Тип: Заявка
Подано: 22 ноября 2018 г.
Дата публикации: 4 ноября 2021 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Дайсуке ОРИИ, Сюхей КОБАЯСИ, Норио ШИРОКОСИ, Хироси ЯМАДЗАКИ
ГЕНЕРАТОР ВОЛН И ПЕРЕДАЧА ВОЛН ДЕФОРМАЦИИ
Номер публикации: 20210324948
Abstract: Волновая передача имеет генератор волн, снабженный жесткой заглушкой и волновым подшипником. Волновой подшипник представляет собой подшипник с глубоким желобом и установлен на эллиптической внешней периферийной поверхности жесткой втулки, при этом его внешнее и внутреннее кольца изгибаются в эллиптическую форму. Где D — диаметр шариков, Ro — радиус поверхности дорожки качения наружного кольца, Ri — радиус поверхности дорожки качения внутреннего кольца, Ro/D — соответствие внешней дорожки качения, а Ri/D — радиус поверхности дорожки качения.
соответствие внутренней дорожки, соответствие внешней дорожки Ro/D больше, чем соответствие внутренней дорожки Ri/D. Момент трения волнового подшипника можно уменьшить, сохраняя при этом его практический срок службы на том же уровне, что и у обычного подшипника.Тип: Заявка
Подано: 7 сентября 2017 г.
Дата публикации: 21 октября 2021 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Синь Юэ Чжан, Ёсихидэ Киосава
Волновая передача
Номер патента: 11143283
Резюме: Волновая передача имеет волновой генератор, который изгибает шестерню с внешним зацеплением в радиальном направлении, образуя ее участки зацепления с шестерней с внутренним зацеплением в положениях, разделенных вдоль окружного направления.
шестерни с внешним зацеплением. Когда генератор волн вращается, части зацепления перемещаются в окружном направлении. Незацепляющиеся области образованы в части зацепляющихся частей вдоль направления следа их зуба. Незацепляемые области имеют заданную ширину, включая опорный центр волнового подшипника в направлении следа зуба. Концентрация напряжения в корне зуба шестерни с внешним зацеплением может быть снижена, а усталостная прочность корня зуба шестерни с внешним зацеплением может быть увеличена.Тип: Грант
Подано: 21 января 2017 г.
Дата патента: 12 октября 2021 г.
Правопреемник: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Ёситомо Мидзогути, Юя Мураяма, Шизука Ята
ДВОЙНОЙ АБСОЛЮТНЫЙ ЭНКОДЕР
Номер публикации: 20210310834
Реферат: Примерный узел кодера включает в себя подложку, первый кодер и второй кодер.
Подложка имеет два или более датчиков положения, причем каждый датчик положения сконфигурирован для определения положения вращения вала или другого вращающегося элемента машины. Первый датчик положения включает в себя по меньшей мере один первый датчик положения из двух или более датчиков положения. По меньшей мере один первый датчик положения расположен на подложке для внеосевого совмещения с валом или другим вращающимся элементом машины. Второй датчик положения включает в себя второй датчик положения из двух или более датчиков положения, причем второй датчик положения расположен на подложке для осевого или внеосевого совмещения с валом или другим вращающимся элементом машины. Каждый датчик положения сконфигурирован для обнаружения разных или общих типов сигналов, а тип сигнала второго датчика положения исключает оптические сигналы.Тип: Заявка
Подано: 4 июня 2021 г.
Дата публикации: 7 октября 2021 г.
Заявитель: HARMONIC DRIVE SYSTEMS INC.
Изобретатели: Брайан КОЙН, Юки КАТО
Modeling and analysis of pure kinematic error in harmonic drive
ScienceDirectRegisterSign in
View PDF
- Access through your institution
Volume 155, January 2021, 104122
https://doi .org/10.1016/j.mechmachtheory.2020.104122Получить права и контент
Приводы Harmonic широко используются в системах точного позиционирования благодаря своим привлекательным характеристикам. Однако кинематическая ошибка является наиболее фундаментальной проблемой в этих приводах. В этой работе мы представляем метод анализа чистой кинематической ошибки гармонического привода с ошибками обработки и сборки. Чистая кинематическая ошибка разбивается на две части, включая составляющую неравномерного движения и составляющую запаздывания. Выявлен феномен частоты биений чисто кинематической ошибки. Объяснение механизма чистой кинематической ошибки подтверждается экспериментальными данными, полученными на специализированном испытательном устройстве гармонического редуктора. Влияние структуры генератора волн (автоматическое выравнивание и интегральные структуры) и формы на чистую кинематическую ошибку гармонического привода обсуждается и оценивается количественно, а также представлена одна возможная новая конфигурация генератора волн, которая может улучшить характеристики передачи привод. Результаты этой статьи считаются полезными для проектирования гармонического привода.
Гармонический привод (ГД) хорошо известен своим высоким передаточным числом, малым весом, малым объемом и высокой эффективностью [1] и широко используется в области робототехники [2]. Они могут выиграть от уникального принципа передачи и простой геометрической структуры. HD содержит только три основных компонента, как показано на рис. 1. Генератор волн (WG) представляет собой стальной сердечник эллиптической формы, окруженный гибким подшипником качения. Flexspline (FS) представляет собой тонкостенную гибкую чашку, на внешнем ободе которой на два зуба меньше, чем на внутреннем ободе кольцевого шлица (CS). CS представляет собой жесткое стальное кольцо с зубьями, проточенными по внутренней окружности. Ожидается, что понимание механизма кинематической ошибки улучшит характеристики управления устройствами на основе гармонического привода, такими как роботы-манипуляторы [3], и производительность передачи HD с точки зрения дизайна. Было проведено множество исследований кинематической ошибки HD [4], [5], [6], [7], [8], [9].], [10], [11], [12], [13], [14], [15], [16], нелинейная жесткость [17], гистерезис [18,19] и динамическое трение [20]. Тем не менее, кинематическая ошибка часто значительно менялась в зависимости от условий сборки, и ее было трудно точно охарактеризовать, и, казалось бы, одно и то же HD может давать разные сигнатуры кинематической ошибки [21,22]. Как указал исследователь Бикаш [23], кинематическая ошибка из-за законов зацепления в HD и связанные с этим проблемы до сих пор остаются в значительной степени необъясненными.
Учитывая его важность, многие исследования были сосредоточены на кинематической ошибке в HD. Емельянов [4] провел математический анализ происхождения кинематической ошибки и показал, что кинематическая ошибка вызвана дефектами сборки и обработки трех основных компонентов ГД. Он обнаружил, что ошибка периодическая и ее основная частота в два раза больше частоты вращения ВГ. Таттл и Сиринг [5] провели обширный эксперимент по анализу кинематической погрешности ГД. Их понимание источника кинематической ошибки согласуется с Емельяновым [4]. Однако Hsia [6] и Ramson [7] оба предположили, что кинематическая ошибка в HD вызвана деформацией FS. Кроме того, Най и Крамл [8] классифицировали кинематическую ошибку на две категории, которые вызваны соответственно внутренними и внешними факторами, и обнаружили, что кинематическая ошибка является динамической и неопределенной. Однако приведенный выше анализ кинематической ошибки основан на феноменологическом методе анализа. Чтобы улучшить точность передачи HD с точки зрения дизайна, необходимо проанализировать механизм кинематической ошибки.
Ся [6] впервые предложил численную формулировку кинематической ошибки на основе эллиптического ВГ. Он утверждал, что кинематическая ошибка является неотъемлемым свойством принципа действия ГД. Основываясь на том же кинематическом механизме ошибки, Gravagno et al. [9] дополнительно проанализировали влияние формы WG на чисто кинематическую ошибку. Однако при их создании игнорируется соответствующая чашка FS. Донг и др. В работе [10] предложена кинематическая модель ГД с учетом входной ошибки эксцентриситета, но изучено влияние входной ошибки эксцентриситета на распределение нагрузки и люфта, а ее влияние на кинематическую ошибку не проанализировано. Чтобы учесть влияние нелинейного гистерезиса на кинематическую ошибку, кинематическая ошибка рассматривалась как сумма синхронной составляющей и нелинейной упругой составляющей Ямамото и др. [11]. Таттл и др. [12] предположили, что кинематическая ошибка в ГД вызвана в основном ошибками изготовления зубчатых колес как в КС, так и в ПС, которые моделировались как сумма синусоидальных функций. В [13] кинематическая ошибка была смоделирована с использованием суммы синусоидальных функций для оценки крутящего момента для роботизированного соединения с HD. Ошибка была исследована Ghorbel et al. [14] в качестве двух компонентов: чистой кинематической ошибки и компонента, вызванного гибкостью при кручении, в которых для подгонки экспериментальных данных чистой кинематической ошибки использовалось разложение в ряд Фурье из пятнадцати членов. Леон и др. [15] исследовали влияние геометрических вариаций зубьев шестерни на кинематическую ошибку с помощью стохастического анализа. Предполагая, что размер зазора неизменен, Liu et al. В работе [16] изучалась зависимость кинематической погрешности от зазора путем перевода зазора различных положений в зазор между зубьями гармонического колеса. Тем не менее, в этой литературе нет полного понимания механизма кинематической ошибки HD с ошибками обработки и сборки.
С целью определенного понимания механизма кинематической ошибки в HD чисто кинематическая ошибка, предложенная Ghorbel et al. [14] моделируется и анализируется в данном исследовании. Обсуждается влияние погрешности обработки, погрешности сборки, формы и структуры WG на чисто кинематическую погрешность. Создается специализированное устройство для испытаний гармонического привода и проводятся эксперименты для проверки предложенной модели.
Этот документ в основном состоит из следующих пяти частей. Первая часть представляет собой кинематический анализ HD, затем вводится чистая кинематическая ошибка HD, которая разлагается на компонент неравномерного движения и компонент запаздывания. Следующим шагом является моделирование ошибок обработки и сборки. В следующей части чистая кинематическая ошибка анализируется и рассчитывается теоретически путем моделирования. Далее обсуждаются и количественно оцениваются влияния формы и структуры ВГ на чисто кинематическую ошибку ГД. Наконец, вводится специализированное устройство для испытаний гармонического привода и методы испытаний, а предлагаемая модель демонстрируется на данных испытаний.
Фрагменты сечения
В традиционной кинематической модели HD нейтральная линия определяется как пересечение центральной поверхности, проходящей через середину толщины стенки FS, и плоскости, перпендикулярной оси вращения. Другими характерными кривыми ФС являются эквидистантная кривая нейтральной линии [9]. Предполагается, что нейтральная кривая сохраняет одинаковую длину (отсутствие деформации) до и после деформации [24], а также отсутствие деформации на закрытом (выходном) конце чашки FS [25]. По нейтральной линии №
В процессах сборки и обработки HD всегда есть случайные ошибки, и эти ошибки, которые приводят к ошибке размещения зубьев, имеют большое влияние на чистую кинематическую ошибку зубчатой передачи. Они в основном делятся на следующие две категории: ошибки эксцентриситета и отклонения зубьев WG, FS и CS.
Мгновенное передаточное отношение не является вечно фиксированной константой для HD. Это может быть связано с несовершенством сборки и механической обработки трех основных частей и основного принципа работы привода. При движении ГД неравномерная составляющая движения действует как периодический возбудитель и вызывает нежелательные вибрационные эффекты. Далее ошибка рассчитывается путем моделирования и объясняется ее механизм.
Результаты моделирования в разделе 4.1.3 показывают, что кинематическая точность может быть улучшена за счет уменьшения ширины WG. В этом разделе будет исследовано влияние структуры и формы РГ на чистую кинематическую ошибку.
Специализированное устройство для проверки гармонического привода предназначено для измерения кинематической погрешности, эффективности и жесткости. Как показано на рис. 20, это электромеханическая система, включающая серводвигатель, нагрузочный двигатель, энкодер, датчик крутящего момента, блок HD и цифровой модуль управления. Концентричность регулируется с помощью инструмента для центровки валов Easy-Laser. Энкодер с разрешением 0,00439° выбирается на входе. Для
используется более точный энкодер (разрешение = 0,00056°). Здесь, синтезируя ошибки обработки и ошибки сборки, предлагается расчетная модель чистой кинематической ошибки HD, и ошибка разбивается на две части: неравномерная составляющая движения и запаздывающая составляющая. Для измерения чистой кинематической погрешности разработано специальное устройство для испытаний на гармонический привод, и целесообразность предложенного подхода продемонстрирована экспериментально. Основные выводы представлены в следующем:
- (1)
Из-за наличия случайных ошибок обработки и сборки,
Мы хотели бы представить прилагаемую рукопись под названием «Моделирование и анализ чистой кинематической ошибки в гармоническом приводе», которую мы хотим быть рассмотрены для публикации в журнале «Mechanism and Machine Theory». Все соавторы ознакомились и согласны с содержанием рукописи, конфликта интересов нет. Мы подтверждаем, что представленная работа является оригинальной и не находится на рассмотрении в какой-либо другой публикации.
Настоящее исследование частично поддерживается Национальной ключевой программой исследований и разработок Китая (2018YFB1304800) и исследованиями фундаментальной науки и передовых технологий Чунцина (cstc2018jcyjAX0363).
Ссылки (33)
- М. Пуэо и др.
Обзор тангенциальных композитных и радиальных композитных зубчатых колес
Precis. англ.
(2017)
- Т. Лин и др.
Аналитический метод определения погрешности сопряженной передачи системы косозубых зубчатых колес с погрешностями механической обработки, погрешностями сборки и модификациями зубьев
Мех. Сист. Сигнал Пр.
(2017)
- X. Chen et al.
Новый метод, основанный на механическом анализе растяжения нейтральной линии чашки гибкого шлица гармонического привода
Мех.
Мах. Theory(2014)
- T. Tjahjowidodo et al.
Теоретическое моделирование и экспериментальная идентификация нелинейного поведения кручения в гармонических приводах
Мехатроника
(2013)
- F. Gravagno и др.
Влияние профиля генератора волн на чистую кинематическую погрешность и центроды гармонического привода
Мех. Мах. Теория
(2016)
- З. Ши и др.
Адаптивная оценка крутящего момента шарнира робота с трансмиссией гармонического привода
Мех. Сист. Сигнальный процесс.
(2017)
- X. Chen et al.
Параметрический расчет двойного дугообразного профиля зуба и его влияние на функциональный люфт гармонического привода
Мех. Мах. Theory
(2014)
- E. Brassitos et al.
Проектирование и разработка компактного высокомоментного роботизированного привода для космических механизмов
ASME J.
Mech. Робот.(2017)
- Емельянов А.Ф.
Расчет кинематической погрешности гармонической зубчатой передачи с учетом соответствия элементов
Сов. англ. Рез.
(1983)
- Т. Таттл, В. Сиринг, Кинематическая ошибка, податливость и трение в трансмиссии с гармоническим приводом, ASME 1993 г.
Гармоническая ошибка ведущей шестерни: характеристика и компенсация для точного наведения и отслеживания
Кинематическая модель гармонического привода в шарнирах роботов с ошибкой входного эксцентриситета
J. Dyn. Система управления
(2019)
Ямамото и др. Моделирование и компенсация угловой погрешности передачи в гармонических передачах
IEEJ Trans. электр. Электрон.
(2009)
Нелинейная модель гармонической ведущей зубчатой передачи
IEEE Trans. Робот. автомат.
(1996)
Обзор эксплуатационных испытаний высокоточных редукторов для промышленных роботов
2021, Measurement: Journal of the International Measurement Confederation механическое движение, особенно в области промышленных роботов. Чтобы удовлетворить требования научных исследований и расширения промышленного производства, всесторонние испытания производительности высокоточных редукторов стали важным направлением в смежных областях. В этой обзорной статье обобщаются основные параметры испытаний, анализируются характеристики существующих методов и предлагаются требования в соответствии с аспектами механической структуры, принципами метрологии и инженерными приложениями.
Кроме того, представлены методы измерения основных физических величин и конкретные методики калибровки, а также обобщена технология нагрузки. Особое внимание уделяется направлениям научных исследований и техническим направлениям для достижения высокоточных измерений, которые могут надлежащим образом определять характеристики высокоточных редукторов.Свойство жесткости зацепления и моделирование состояния зацепления гармонического привода под нагрузкой трансмиссии
2022 Frontiers of Machine Engineering
Метод высокоточной подгонки и правки гибких и круговых жестких шлицев с эвольвентным профилем зубьев в зубчатом колесе фасонное шлифование
2022, International Journal of Advanced Manufacturing Technology
Моделирование скорости скольжения гармонического редуктора на основе профиля зуба с двойной дугой
2022, Труды Института инженеров-механиков, часть C: Journal of Machine Engineering Science
Предупреждение об отказе гармонического редуктора на основе прогноза мощности
2022, Journal of Physics: Conference Series
Расчет зубца погрешности толщины и их влияние на люфт зацепления гармонического привода
2022, ResearchSquare
Научная статья
Влияние управляемых опорных элементов, смазываемых магниточувствительными жидкостями, на хаотическую и регулярную вибрацию гибких роторов при трении
Теория механизмов и машин, Том 155, 2021 г.
, Статья 104096Предлагаемый новый опорный элемент ротора состоит из гидродинамической опоры и магнитореологический пленочный демпфер. Демпфирование регулируется изменением сопротивления потоку магнитореологической жидкости за счет действия магнитного поля, создаваемого электрическим током, питающим электрические катушки. В данной работе исследовано влияние предлагаемого опорного элемента на характер вибрации ротора при трении при наведении ударов между диском и стенками отверстия квадратной формы в неподвижной части. Система возбуждается дисбалансом ротора. Целью анализа является исследование влияния приложенного тока, генерирующего магнитное поле, на регулярность вибрации ротора. Результаты моделирования показывают, что характер вибрации зависит от скорости вращения ротора, а приложение тока нужной величины может превратить нерегулярные колебания в периодические и уменьшить величину ударных сил. Предлагаемый опорный элемент позволяет использовать все преимущества гидродинамических подшипников.
Управление эффектом демпфирования очень простое, так как демпфер может работать только в режиме вкл/выкл. Проведенное исследование помогает лучше узнать конструктивные возможности подавления нежелательных явлений, вызванных трением ротора.Научная статья
Компьютерный подход к проектированию и созданию торцевых фрезерованных гипоидных зубчатых колес с малым углом наклона вала
Теория механизмов и машин, том 155, 2021 г., статья 104084 предложено создание торцево-фрезерованных бесформенных гипоидных передач с малым углом наклона вала. Разработан и применен новый метод расчета делительного конуса, основанный на двух математических итерациях, для гипоидных передач с малым углом наклона вала. Параметры заготовки зубчатого колеса взяты из стандарта ANSI/AGMA ISO 23509.-B17 и станочные настройки для колеса, определенные на основе существующего подхода. Затем определение станочных настроек шестерни осуществляется на основе применения метода локального синтеза.
Разработан метод нахождения требуемого коэффициента сложения для колеса, основанный на исключении особенностей на активных поверхностях шестерни, а также численные методы проверки на подрезку, заостренность верхнего пояса и гладкость корневого пояса. применяемый. Таким образом, выбранные конструктивные параметры гипоидных передач с малым углом наклона вала позволяют получить параметры геометрии передачи для приемлемых геометрий шестерни и колеса. Разработанный подход к проектированию и созданию гипоидных передач с малым углом наклона вала проверен на ряде численных примеров.Исследовательская статья
Динамическое взаимодействие между проводом передачи и траверсой
Теория механизмов и машин, Том 155, 2021 г., Статья 104068
проволока резко хлынет сквозь железные башни и упадет на конструкцию укрытия, названную крестовиной. В этом исследовании разработан метод систематического динамического анализа для исследования динамического взаимодействия между проводом электропередачи и поперечной рамой, что имеет решающее значение для обеспечения безопасности строительной техники.
Кабельный элемент Absolute Nodal Coordinate Formulation используется для моделирования провода передачи. Разработана методика описания и решения скользящих соединений между проволокой и железными башнями. Предложена эффективная процедура поиска контакта, основанная на пространственном методе межлучевого контакта. Поскольку динамические свойства проволоки и крестовины сильно различаются, создается технология совместного моделирования. Пример удара между свободно падающей проволокой и стальными стержнями выполнен как численно, так и экспериментально. Наконец, тестируется полноразмерная кросс-каркасно-проволочная модель. Продемонстрирована реализуемость, точность и эффективность предлагаемой методики, которая позволяет значительно повысить эффективность конструкции кросс-рамы и обеспечить безопасность строительства электрообъекта.Исследовательская статья
Анализ холостого хода редуктора CBR
Теория механизмов и машин, Том 120, 2018 г., стр. 89-106 Диапазон размеров и высокой жесткости предлагается под названием Китайский подшипниковый редуктор (CBR).
В этой статье представлен дизайн CBR и его анализ потерь движения. Уравнение профиля с модификацией циклоидной передачи получено методом анализа зубчатой передачи. Проанализировано начальное распределение зазоров, вызванное модификацией профиля. Для уменьшения потери движения представлен метод составных модификаций, основанный на отрицательной изометрии и отрицательном смещении. Наилучшие значения модификаций получают методом оптимизации с учетом погрешности изготовления. Затем анализируются причины холостого хода редуктора CBR и выводится расчетная формула для каждой причины. Изготовлен физический прототип и проведен эксперимент по потере движения. Экспериментальные результаты показывают, что редуктор CBR имеет небольшую потерю хода, которая может соответствовать требованиям робота.Исследовательская статья
Анализ напряжения диафрагмы и оценка усталостной прочности гибкого шлица, очень тонкостенного цилиндрического зубчатого колеса, используемого в волновой передаче
Механизм и теория машин, том 104, 2016 г.
, стр. 1- 16В данной статье рассматриваются проблемы анализа напряжения диафрагмы и расчета усталостной прочности гибкого шлица, тонкостенного цилиндрического зубчатого колеса, используемого в волновой передаче (SWG). Во-первых, в этой статье представлены механическая модель и теоретический метод, используемые для контактного анализа SWG. Затем программное обеспечение для метода конечных элементов (МКЭ) саморазрабатывается с помощью очень длительных усилий, чтобы реализовать контактный анализ и расчеты напряжений SWG. С помощью разработанного программного обеспечения FEM успешно анализируются изгибающие и касательные напряжения диафрагмы гибкого шлица. Во-вторых, чтобы подтвердить программное обеспечение FEM, в этой статье представлены экспериментальный метод и устройство. Трехнаправленный тензодатчик наклеен на прямую поверхность конической диафрагмы гибкого шпона рядом с углом диафрагмы с приливом. Деформации диафрагмы измеряются в условиях нулевого и 110 Нм крутящих моментов соответственно, а измеренные напряжения сравниваются с расчетными с помощью разработанного программного обеспечения FEM при тех же условиях.
Установлено, что оба результата хорошо согласуются друг с другом. Это означает, что представленная модель механики и теоретический метод правильны и эффективны. Наконец, метод, используемый для оценки усталостной прочности диафрагмы, предлагается на основе выводов, сделанных в этой статье.Научная статья
Кинематические характеристики и частота признаков неисправности гибкого тонкостенного эллиптического подшипника
Механические системы и обработка сигналов, том 149, 2021 г., статья 107222
Гибкий тонкостенный эллиптический подшипник (FTEB) тип подшипника с совершенно другими кинематическими характеристиками и частотами признаков неисправности, чем обычный подшипник качения. Установлено, что траектория центра ролика FTEB не соответствует делительному эллипсу, в то время как траектория обычного подшипника качения представляет собой делительную окружность. Далее исследуется траектория движения ролика относительно делительного эллипса и сепаратора.