виды промышленной робототехники в производстве – примеры применения
Содержание:
- Что представляет собой промышленная робототехника
- Что называют промышленными роботами
- Виды промышленных роботов
- Типы промышленных роботов по назначению
- Перспективы применения
- Основные преимущества использования промышленных роботов
- Производители промышленных роботов
- Fanuc
- Hanwha
- Kuka
- Universal Robots
- uFactory
- ABB
- Yaskawa
- Kawasaki
- Автомобильная промышленность
- Производство электроники
- Пищевая промышленность
- Сельское хозяйство
Автоматизация давно является неотъемлемой частью современного производства. Робототехника становится дешевле. В частности, за последние десять лет цены на промышленные роботы понизились почти на 30%. А в следующее десятилетие прогнозируется спад цен на них еще на 20%. В 2020 году продажи производственных роботов увеличились на 15%. Соответственно, промышленные роботы активно приобретаются не только крупным, но и средним и малым бизнесом.
В частности, за последние десять лет цены на промышленные роботы понизились почти на 30%. А в следующее десятилетие прогнозируется спад цен на них еще на 20%. В 2020 году продажи производственных роботов увеличились на 15%. Соответственно, промышленные роботы активно приобретаются не только крупным, но и средним и малым бизнесом.
Каталог промышленных роботов
Что представляет собой промышленная робототехника
Это отрасль современного производства, которая занимается разработкой и производством промышленных роботов-манипуляторов и систем, направленных на автоматизацию производственных процессов и замену ручного труда механическим.
Первый промышленный робот Unimate был выпущен в Америке в 1954 году. Его изобрел основатель фирмы Unimation Джордж Девол. В 1961 году робот был запущен в массовое производство на предприятии General Motors. В 70-80-е годы 20 века робототехника продолжала развиваться дальше.
Что называют промышленными роботами
Промышленные роботы (ПР) представляют собой устройства, работающие по заданной программе и осуществляющие движение, перемещение и управление в рамках производственного процесса.
Виды промышленных роботов
Специалисты выделяют три основных вида промышленных роботов.
- Автоматические.
- Программные роботы – работают на основе циклической программы, которая заранее вводится в блок памяти. Это самые простые и дешевые представители автоматических роботизированных устройств.
- Адаптивные – благодаря встроенной системе датчиков и сенсоров могут переключать программу с учетом изменения внешних условий.
- Обучаемые – управляющая программа корректируется в зависимости от хода технологического процесса. Затем робот функционирует с учетом внесенных изменений.
- Интеллектуальные – последнее поколение устройств. Они имеют элементы искусственного интеллекта, поэтому могут сами анализировать окружающую среду и действовать с учетом полученных сведений.

- Манипуляторы или командные роботы. Управляются оператором дистанционно.
- Копирующие. Повторяют действия оператора.
- Полуавтоматические. Оператор задает движение основному органу, работа сочленений согласуется и корректируется системой управления.
- Автоматизированные. Автоматический режим работы чередуется с работой оператора.
- Супервизорные. Автоматически выполняют заданный цикл, но переход от одного этапа работы к другому осуществляется через команды оператора.
- Диалоговые. Работая в автоматическом режиме, в то же время взаимодействуют с оператором с помощью специального языка (например, голосовые команды).
По грузоподъемности:
- Легкие – до 10 кг.
- Средние – 11-200 кг.
- Тяжелые – 200 кг – 1 т.
- Сверхтяжелые – более 1 т.
По маневренности:
- Стационарные.
- Подвижные.
По способу установки:
- Встроенные.

- Подвесные.
- Напольные.
Промышленного робота выбирают в зависимости от условий его эксплуатации и от задач, которые ставит перед собой производитель.
Типы промышленных роботов по назначению
По назначению роботы условно делятся на несколько категорий.
Универсальные, то есть выполняющие различные виды операций.
Специальные. Они работают даже в неблагоприятных условиях или имеют особые функции.
Специализированные. Такие роботы предназначены для осуществления какого-либо одного вида деятельности: сборка, резка, сварка, покраска, паллетирование и пр. Рассмотрим некоторые из них.
- Роботы для паллетирования. Они используются для погрузочно-разгрузочных работ и укладки изделий в паллеты по определенным схемам. Это, например, роботы Fanuc серии M410 (работа со средними и тяжелыми грузами). Сюда же можно отнести KUKA KR QUANTEC PA Arctic – паллетоукладчик, работающий даже при минус 30 градусах.

- Роботы для сварки. К примеру, аппараты серии FANUC Arc Mate умеют паять и выполнять все виды сварки.
- Роботы для покраски. Они оснащаются распыляющими устройствами и успешно работают с лакокрасочными покрытиями разных типов (FANUC Paint).
Роботы-манипуляторы.
- Традиционные. Это своеобразные робо-руки, работающие на сервоприводах. Движения ограничиваются размерами самой руки и инструмента, который закрепляется на ней. Они поворачиваются и совершают сложные движения по разнообразным траекториям. К ним относятся пневмоприсоски, захваты, распылители краски, роботы для 3D-печати, сварки.
- Дельта-роботы. Совершают быстрые и точные движения, поэтому служат для выполнения фасовочных и монтажных работ в фармацевтике, электронной и пищевой промышленности.
- Роботы типа SCARA. Их особенность: высокая точность и повторяемость, наряду с меньшей областью работы и степенью свободы. Соответственно, используются в производствах, где важна точность, а не большая зона доступа (комплектация изделий и пр.
 ).
).
Роботы для обслуживания станков. Их основные функции – выемка деталей из станков с ЧПУ, загрузка материала, техническое обслуживание: замена инструментов, смазка. Могут обслуживать несколько станков.
Коллаборативные роботы (коботы). Работают вместе с людьми, и полностью безопасны для них. Легко настраиваются на разные виды работ, их можно быстро обучить выполнять новые задачи. На данный момент считаются лучшими промышленными роботами.
Каталог коллаборативных роботов
Перспективы применения
Как было сказано выше, робототехника становится все более и более дешевой и доступной, поскольку:
- Один робот заменяет несколько десятков человек.
- Он вырабатывает больше продукции.
- Окупает себя примерно за 12-15 лет.
Развитие этой отрасли идет по пути разработки искусственного интеллекта. Наиболее перспективные отрасли развития робототехники в России – это:
- Строительство.

- Обрабатывающая промышленность.
- Горнодобывающая промышленность.
- Сельское хозяйство.
Основные преимущества использования промышленных роботов
Эти устройства уже доказали свою эффективность. Благодаря им:
- Снижаются затраты, в том числе и на рабочую силу.
- Повышается точность изготовления.
- Уменьшается количество брака.
- Ускоряются производственные процессы.
- Экономится материал и электроэнергия.
- Снижается стоимость обработки.
- Ускоряется процесс перехода на другой проект.
Производители промышленных роботов
При покупке промышленного робота имеет смысл поинтересоваться его производителем. Можно выделить несколько компаний, известных во всем мире.
Fanuc
Каталог роботов Fanuc
Японская компания Fanuc – мировой лидер по производству промышленных роботов. По данным на 2018 год по всему миру было установлено 400 000 роботов производства Fanuc.
В частности, разработанная компанией модель FANUC M-1iA отлично подходит для предприятий, занимающихся небольшими электронными устройствами. Ее основные характеристики: высокая точность, небольшая грузоподъемность, повышенная производительность, быстрая сборка деталей.
Hanwha
Hanwha – известный производитель коллаборативных роботов. Продукция этой южнокорейской фирмы используется в Азии, Европе и США. Кобаты (коллаборативные роботы) становятся все популярнее, т.к. они дешевле в обслуживании и просты в управлении.
Наибольшим спросом пользуется Hanwha HCR-5 cobot. Он применяется для изготовления электронных устройств, при обработке пластика, в пищевой, автомобильной и фармацевтической промышленности.
Kuka
Kuka выпускает промышленных роботов, выполняющих многосерийные задачи: паллетирование, погрузку, упаковку, сварку, сборку, обработку.
Например, роботы Kuka, выполняющие автоматическую дуговую сварку, используются на заводе Gestamp в Билефельде при производстве рам лестничного типа для автомобилей Volkswagen. Они обеспечивают надежность и высокую производительность.
Universal Robots
Universal Robots основана в 2005 году. Она производит гибких коллаборативных роботов небольшого размера. Первая модель — UR5 – была выпущена в 2008 году. Кобаты Universal Robots используются при сборке, паллетизации, упаковке, покраске, литье, сварке. Они совместимы со станками с ЧПУ.
К примеру, модель UR 10 со средней грузоподъемностью применяется при сварке, склейке, пайке деталей, совмещается с фармацевтическим, сельскохозяйственным и технологическим оборудованием. Может размещаться на столе.
uFactory
uFactory – китайский производитель, специализирующийся на выпуске настольных роботов для малого бизнеса и обучения.
Одна из последних разработок компании — uArm Swift Pro. Эта роботизированная рука предназначена для бытовых целей, в частности, для 3D-печати. На нее можно установить лазерный гравер, головки для печати, различные захваты. При необходимости аппарат легко перевести в обучающий режим.
ABB
ABB – швейцарская фирма, которая выпустила на сегодняшний день более 160 тысяч роботов. Они используются в пищевых и мебельных производствах, в фармакологии, электронике и пр.
Фирма АВВ – пионер на рынке робототехники. Именно она 40 лет назад произвела первого в мире электрического промышленного робота и первого в мире робота для покраски.
В России задействованы около 1,5 тыс. роботов этой фирмы. Например, они осуществляют контроль качества на предприятиях компании Novo Nordisk (Калужская область), автоматизируют производственные процессы завода «МолПродукт» (Московская область) и т.д.
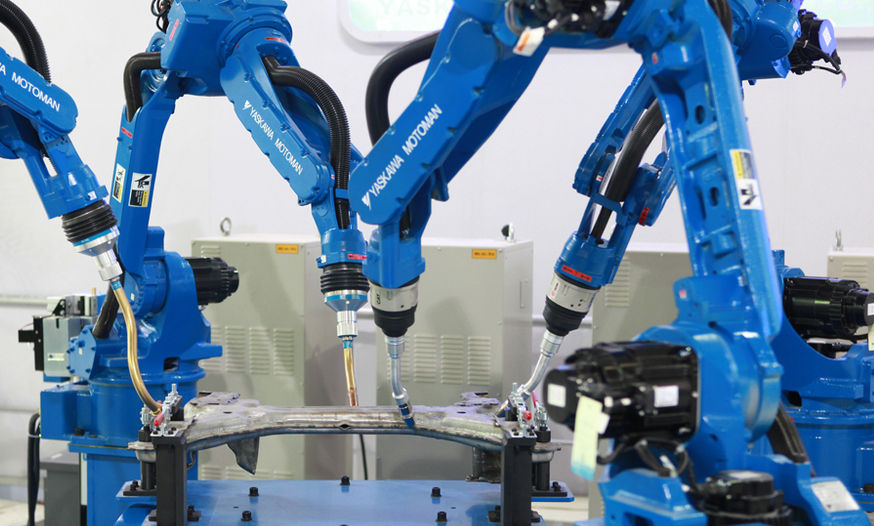
Yaskawa
Эта одна из старейших японских фирм основана в 1915 году. В 1977 году произвела первую серию собственных промышленных роботов MOTOMAN-L10. Они предназначены для покраски, сварки, резки, упаковки, сборки.
В 1977 году произвела первую серию собственных промышленных роботов MOTOMAN-L10. Они предназначены для покраски, сварки, резки, упаковки, сборки.
В 2007 компанией Yaskawa разработан самый быстрый робот для дуговой сварки — МОТОМАN SSA2000.
Kawasaki
Компания работает на рынке робототехники с 1969 года. Она специализируется на выпуске роботов для покраски, паллетирования, сварки. Высоко ценятся среди покупателей роботы для чистых помещений, двурукие, шарнирные. Они также подходят для работы в сложных условиях (агрессивные среды, высокие температуры).
Проблемы промышленных роботов и их решение
Основные проблемы среднего и малого бизнеса, ведущие к отказу от использования промышленных роботов:
- небольшой объем заказов;
- отсутствие узких специалистов, владеющих навыками программирования, или повышенная оплата за их труд;
- невозможность автоматизации каких-либо задач из-за отсутствия крупных серий;
- нехватка места в цеху или другом помещении.

Все эти вопросы легко решаются при помощи роботов нового поколения – коботов. Они:
- Могут работать с мелкими сериями или даже производить единичную продукцию.
- Имеют открытую архитектуру – это значительно увеличивает их потенциал.
- Быстро переключаются между операциями.
- Легко перенастраиваются на другие задачи.
- Безопасны, т.к. оснащены специальными датчиками, которые предотвращают столкновение с человеком.
- Не требуют много места или специального ограждения.
Применение промышленных роботов в различных отраслях промышленности
Промышленные роботы особенно активно применяются в тех отраслях промышленности, где необходима точность и быстрота действий. Они успешно заменяют людей при выполнении опасных или монотонных операций или при работе в агрессивных средах.
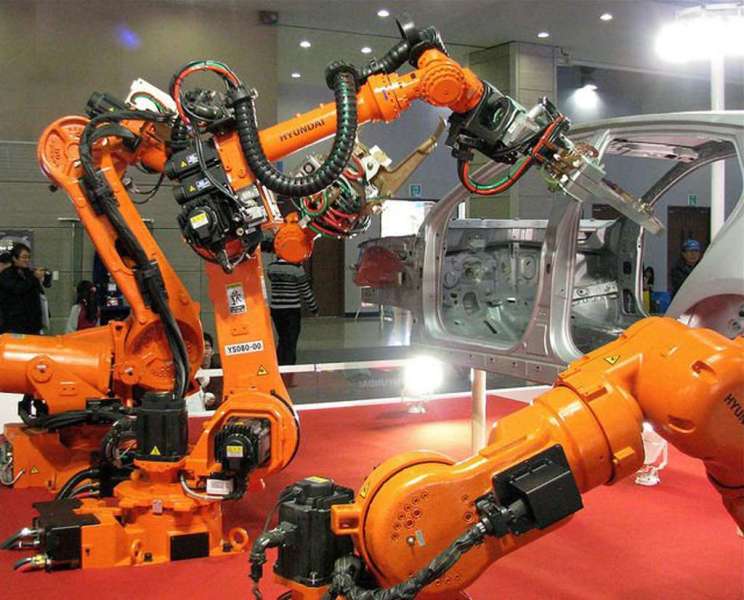
Автомобильная промышленность
На сегодняшний день это лидер по внедрению робототехники в производственные процессы. Например, венгерская компания AUDI Hungary выпускает автомобили, используя роботы Fanuc. Роботы для лазерной и плазменной резки задействованы на заводах Renault во Франции.
Например, венгерская компания AUDI Hungary выпускает автомобили, используя роботы Fanuc. Роботы для лазерной и плазменной резки задействованы на заводах Renault во Франции.
Производство электроники
Компания ALNEA Sp. z.o.o. – известный производитель тестовых приборов – применяет KUKA KR 6 R900 для пайки печатных плат. В результате время выполнения заказов уменьшается в два раза.
Ряд предприятий использует шестиосевой робот-манипулятор Yaskawa Motoman Mh22 для сборки компьютерных жестких дисков.
Пищевая промышленность
Atria Scandinavia – шведская компания, которая выпускает вегетарианские продукты. Упаковкой, маркировкой и укладкой занимаются манипуляторы UR 10. Они обрабатывают более 200 позиций в час на каждой линии производства.
Сельское хозяйство
Некоторые роботы могут собирать урожай. Например, Agrobot SW6010 использует сенсоры и манипуляторы для обнаружения и сбора спелой клубники. В систему «Vegebot», которая предназначена для сбора салата, входит робот-манипулятор UR10 с шестью степенями свободы.
Заключение
В наше время между понятием «конкурентоспособность» и понятием «автоматизация» нередко ставится знак равенства. Современные роботы рентабельны даже для небольших организаций, поскольку улучшают условия труда, повышают производительность и качество выпускаемой продукции. Затраты на них быстро окупаются.
Таким образом, промышленные роботы с легкостью внедряются в любые производственные процессы, следовательно, их разработка и внедрение значительно расширяют возможности и перспективы робототехники.
Приобрести Робот манипулятор и задать свой вопрос, или сделать предложение, вы можете, связавшись с нами:
- По телефону: 8(800)775-86-69
- Электронной почте:[email protected]
- Или на нашем сайте: https://3dtool.ru/
Не забывайте подписываться на наш YouTube канал :
Вступайте в наши группы в соц.сетях:
ВКонтакте
составные части, как устроен и что это такое
Сейчас в качестве главной движущей силы в развитии производств и их автоматизации выступают промышленные роботы-манипуляторы.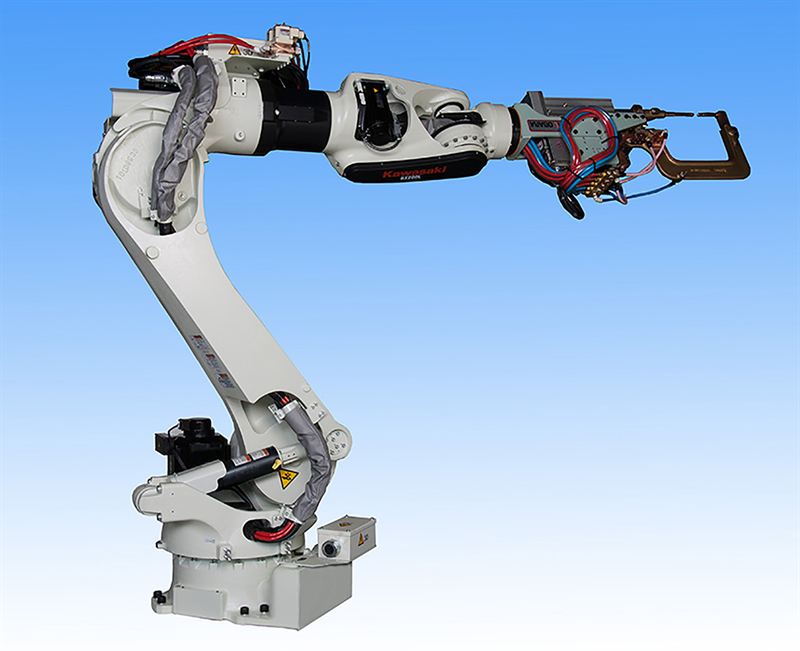 Их внедрение позволяет предприятиям выйти на новый уровень выполнения задач, увеличить эффективность работы и перераспределить обязанности между устройствами и людьми.
Их внедрение позволяет предприятиям выйти на новый уровень выполнения задач, увеличить эффективность работы и перераспределить обязанности между устройствами и людьми.
Что такое промышленные роботы манипуляторы: описание
Робот-манипулятор — это промышленное оборудование, которое выполняет функции человеческой руки. Это может быть как отдельное устройство, так и составная часть сложного роботизированного комплекса.
Отдельные части механизированной руки имеют соединения, которые позволяют выполнять вращательные или поступательные движения. Это обеспечивает многофункциональность таких машин.
С каждым годом увеличивается потребность в снижении эксплуатационных расходов на предприятиях, из-за чего спрос на промышленную робототехнику постоянно увеличивается. Это способствует развитию отрасли.
Уменьшения расходов на предприятиях можно добиться при помощи снижения количества ошибок, потерь сырья и числа несчастных случаев. Также необходимо сделать предприятия более производительными и технологически гибкими. Все эти вопросы решают роботы-манипуляторы. Они способны работать с высокой точностью даже в опасных условиях.
Все эти вопросы решают роботы-манипуляторы. Они способны работать с высокой точностью даже в опасных условиях.
Устройство: механизмы и характеристики
Механическая подвижная рука управляется при помощи электронной системы. Зачастую в современных устройствах не применяется гидравлика и пневматика, так как такие системы слишком дорогие в эксплуатации и недолговечные. Наиболее важные характеристики руки-манипулятора:
- Количество осей. Зачастую у промышленных роботов 4 оси. Такие устройства используются для сортировочных и фасовочных работы. Также манипулятор может иметь 6 осей, если нужно выполнять более сложные работы.
- Количество степеней свободы. Их может быть от 2 до 6. Чем больше степеней свободы, тем больше у робота возможностей и тем точнее устройство может повторять движения человеческой руки.
Основные части устройства:
- Плечо. Так называют неподвижную основу, на которую крепятся все остальные элементы.
- Локоть. Определяет главное положение манипулятора в пространстве.

- Запястье. Этот элемент отвечает за точность выполнения работы.
- Кисть. Захватывает предметы и выполняет другие действия. В качестве «пальцев» могут выступать присоски, распылители, отвертки, сварочные и другие элементы.
Количество подвижных частей и их сочленений может меняться в зависимости от потребностей. Кроме того, у одного робота может быть не одна, а сразу несколько рук, что позволяет автоматизировать одновременно несколько рутинных операций.
Манипуляторы бывают стационарными и мобильными. Вторые могут перемещаться по помещению при помощи колес, гусениц и др. На подвижных роботах всегда устанавливают специальные датчики движения для обеспечения безопасности работников и производственного процесса.
Как работают?
Отдельные части манипулятора перемещаются в пространстве благодаря приводам, которые являются аналогами мышц у человека. Если в качестве источника механической энергии выступает электродвигатель, то такие приводы называются электрическими. Также бывают гидравлические и пневматические приводы, но они практически не используются.
Также бывают гидравлические и пневматические приводы, но они практически не используются.
Управляют роботом с мобильного или стационарного пульта. Оператору необходимо следить за параметрами устройства и регулярно контролировать результаты работы. Эти операции можно производить дистанционно, используя видеокамеру. Человеку даже не нужно находиться в одном помещении с манипулятором.
Также существуют устройства, в которых реализована возможность самообучения. Работу единожды выполняют в ручном режиме, после чего робот запоминает всю последовательность действий и повторяет их.
Сферы применения
Роботы-манипуляторы подразделяют в зависимости от того, в какой области промышленности они используются. Основные сферы применения:
- Автомобилестроение. К примеру, на заводе Tesla установлено более 160 роботизированных рук, которые выполняют большую часть операций по сборке автомобилей. Причем их количество постоянно увеличивается.
- Электроника и электротехника.
 Yaskawa Motoman Mh22 — это шестиосевой манипулятор, который выполняет сборку жестких дисков для компьютеров.
Yaskawa Motoman Mh22 — это шестиосевой манипулятор, который выполняет сборку жестких дисков для компьютеров. - Машиностроение и металлообработка. На таких производствах манипуляторы выполняют финишную обработку и шлифовку различных деталей из металла и композитных материалов.
- Химическая промышленность. В этой отрасли роботов применяют для автоматизации работы с опасными веществами. К манипуляторам, используемым в химической промышленности, предъявляются особые требования. Устройства должны быть устойчивыми к агрессивным средам и иметь высокую точность позиционирования.
- Медицина и фармацевтика. В медицине манипуляторы используют в качестве помощника на операциях. Роботы должны быть очень чувствительными, чтобы осторожно выполнять все действия. Также такие устройства позволяют совершать хирургическое вмешательство удаленно.
- Продовольствие и сельское хозяйство. В сельском хозяйстве применяют мобильные манипуляторы для сбора урожая.
Типы промышленных роботов для манипуляционных работ
Сейчас промышленные роботы условно подразделяют на 3 типа:
- автоматические;
- биотехнические;
- интерактивные.
Они имеют разные возможности. Выбор зависит от задач производства.
Коллаборативный робот-манипулятор Universal Robots UR 3e
UR 3e — это небольшой настольный манипулятор, которых хорошо подходит для автоматизации рабочих мест и выполнения легких операций по сборке. Компактный робот весит 11 кг, а его грузоподъемность составляет 3 кг. Способен вращаться во всех сочленениях на 360 градусов.
Коллаборативный робот-манипулятор Universal Robots UR 5e
Это тоже относительно компактное устройство. Его вес составляет 20,6 кг, а грузоподъемность — 5 кг. Имеет 6 осей и досягаемость в пределах 850 мм. Точность составляет 0,03 мм.
Применяется в основном для сборочных работ предметов средних размеров. Но подходит для автоматизации различных процессов, включая сварку.
Коллаборативный робот-манипулятор Universal Robots UR 10e
Манипулятор UR 10e является самой большой моделью от компании Universal Robots. Он предназначен для выполнения масштабных работ, при которых особую роль играют точность и надежность. Робот может в автоматическом режиме выполнять задачи с полезной нагрузкой в 10 кг.
Робот может в автоматическом режиме выполнять задачи с полезной нагрузкой в 10 кг.
Радиус действия механической руки достигает 1300 мм. Наибольшую эффективность манипуляторы показывают на больших площадях.
Преимущества и перспективы использования
Механизированные руки для промышленных работ сейчас являются основой любого производства. При внедрении роботов в свои рабочие процессы компания обеспечивает автоматизацию, что повышает эффективность и делает производство более надежным и универсальным.
Нередко применение робототехники является единственным способом выживания компании в конкурентной среде. Использование промышленных роботов позволяет уменьшить человеческий труд и удешевить производство, так как техника справляется с работой намного качественнее и быстрее.
Среди других преимуществ применения робототехники можно выделить такие:
- Манипуляторы отлично заменяют ручной труд.
- Использование автоматов в промышленности значительно увеличивает производительность.
 Кроме того, роботы способны работать круглосуточно.
Кроме того, роботы способны работать круглосуточно. - Повышение экономических показателей. Техника заменяет человеческий труд, что позволяет сильно снизить расходы по зарплате сотрудникам.
- Безопасность. Использование промышленных роботов особенно актуально на вредных для людей производствах, например в литейной промышленности, при покрасочных работах, на химических предприятиях и т. д.
- Качество. Главный фактор применения робототехники — качество обработки. Точность промышленных манипуляторов достигает 0,02 мм с бесконечным количеством повторений. Если исключить из производственного процесса ручной труд, то вероятность возникновения ошибок очень мала.
- Современная техника почти не требует обслуживания. Это обусловлено применением асинхронных двигателей и высококачественных редукторов.
Современные роботы-манипуляторы способны выполнять практически любую работу с высокой точностью Автоматизация производств при помощи робототехники ведет к повышению производительности и рентабельности.
- 20 декабря 2020
- 5309
Получите консультацию специалиста
Роботы в промышленности — их типы и разновидности / Хабр
Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно — чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов — эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.
Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают — роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.![]()
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно — зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять — что же они умеют? Нет конечно. Поехали.
Поехали.
Рассмотрим образцы
Среди промышленных роботов выделяется продукция таких известных фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
KUKA KR QUANTEC PA Arctic
KUKA KR QUANTEC PA — один из лучших роботов-палетоукладчиков на рынке. KUKA KR QUANTEC PA Arctic — его модификация, робот функционирующий при экстремально низких температурах. Он создан для работы преимущественно в морозильных камерах, при температурах до -30 °C. Электронные и механические части аппарата не нуждаются в защите от мороза, снега, инея, а также не выделяют излишнего тепла. Радиус действия манипулятора модификации Арктик, как и у стандартного KUKA KR QUANTEC PA, составляет 3195 мм, а полезная нагрузка — до 240 кг. Аппарат идеален для применения в пищевой промышленности и в условиях крайнего севера. Кроме составления штабелей из паллетов, робот может выполнять и другие манипуляции, ведь точность его движений, а точнее говоря — стабильность повторяемости позиционирования, составляет 0,06 мм.
FANUC M-2000iA/1200
FANUC M-2000iA/1200 — пятиосевой грузоподъемный робот поднимающий до 1200 кг и перемещающий этот груз на расстояние до 3,7 м — идеален в качестве погрузчика, так как работает без участия человека, что практически сводит к нулю опасность травматизма. Работает при температурах 0°C — +45 °C. Стабильность повторяемости — 0,03 мм.
Крайне прочный аппарат.
Universal Robots — UR10
UR10 — самый крупный из манипуляторов Universal Robots и это коллаборативный робот, проще говоря — он создан для работы с другим оборудованием и помощи в работе человеку.
Манипулятор модели UR10 имеет радиус действия 1,3 м и поднимает груз до 10 кг. Его можно использовать с сельскохозяйственным, фармацевтическим, технологическим и многим другим оборудованием. Компактно размещается на рабочем месте человека, чтобы стать ему “третьей рукой”, легко программируется и быстро настраивается.
UR10 умеет завинчивать, клеить, сваривать и паять, производить литьевые и сборочные работы.
Также роботы Universal Robots применены в проекте Voodoo Manufacturing: Project Skywalker компании Medium Corporation — это фабрика 3D-печати, многие операции на которой выполняют именно роботы-манипуляторы. Такие действия, как замена платформ для печати, сбор и складирование готовых изделий больше не требуют неустанного внимания персонала.
Особенно интересны универсальные роботы, так как именно они, в силу своего назначения, снабжены наиболее адаптивными системами управления.
Rethinkrobotics
Это такие роботы, как Baxter и Sawyer производства Rethinkrobotics.
Baxter — многофункциональный робот с двумя манипуляторами и системами обратной связи и самообучения.
Его 7-осевые манипуляторы способны почти на всё, на что способна рука человека, в том числе — имеют обратную связь и могут контролировать прилагаемые усилия. Это, плюс ещё особенности дизайна, делают Бакстера безопасным для живых рабочих — его рабочее место не нуждается в ограждении, да и вообще — места он занимает немного, что здорово экономит пространство в цеху. Пара бакстеров способна успешно работать вместе.
Пара бакстеров способна успешно работать вместе.
Бакстер интересен еще и тем, что не требует тщательного подробного программирования каждого своего действия — “учить” его можно не только через интуитивно понятное визуальное приложение, но и прямо на рабочем месте — повторяя показанные движения он запоминает их и применяет в дальнейшем.
Sawyer — “младший брат” Бакстера — удивительно компактный и легкий робот-манипулятор, он весит всего 19 килограмм и может быть установлен почти где угодно, не занимая при этом много места.
Точность действий Сойера доходит до 0,1 мм, что позволяет использовать его в сотнях видов комплектовочных, сборочных и других конвейерных работ.
Оба робота легко переобучаются для выполнения новых функций даже без применения традиционного программирования и столь же просто перемещаются с одного рабочего места на другое.
Гибридное производство
Stratasys Infinite-Build 3D Demonstrator
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа — гибрид робота и 3D-принтера.
Конечно, любой 3D-принтер обладает признаками робота, но тут — это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” — “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.
Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления — все говорит нам о том, что у этого аппарата и его потомков большое будущее.
3D Systems — Figure 4
Figure 4 компании 3D Systems — модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.
Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут — в отличие от нескольких часов на обычных SLS-принтерах.
Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.
Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus — полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.
Принтер также роботизирован — снабжен системой автоматической загрузки, удаления и переработки печатного порошка.
Можно с уверенностью сказать, что комплексный подход к 3D-печати — часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
Carbon — Carbon SpeedCell
Carbon SpeedCell — технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.
CLIP — технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.
Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует — это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI — LASERTEC 65 3D
Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением — пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка — все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.
Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS — Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности — этот манипулятор создан по примеру хобота слона.
Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например — из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:
https://youtu.be/vQ_Zh0bxhs8
Также компания спонсирует и представляет проект Roboy — это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog — M Line Factory
Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект — M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.
https://youtu.be/0v4LAbjfJxc
Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл — от загрузки проекта в память, до выхода готового изделия на склад, — без необходимости вмешательства оператора.
Additive Industries — The MetalFAB1
Единственная в своем роде установка — единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически — готовый цех металлической 3D-печати в одном корпусе.
Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.
А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.
Например, вот так это делает упомянутый выше Sawyer:
https://youtu.be/XU6thj7cQ5c
Выводы
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих — они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих — они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде — многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, — но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
»
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
Подписывайтесь на наш телеграм-канал с отборными кейсами роботизации и автоматизации со всего мира: https://tglink.ru/easy_robotics
Что такое промышленные манипуляторы — Различные типы промышленных манипуляторов
Промышленные манипуляторы или Роботизированные манипуляторы — это машины, которые используются для манипулирования или управления материалом без прямого контакта. Первоначально он использовался для манипулирования радиоактивными или биологически опасными объектами, с которыми человеку может быть трудно справиться. Но теперь они используются во многих отраслях промышленности для выполнения таких задач, как подъем тяжелых предметов, непрерывная сварка с высокой точностью и т. Д. Помимо промышленности, они также используются в больницах в качестве хирургических инструментов. И сегодня врачи широко используют роботов-манипуляторов в своей работе.
Первоначально он использовался для манипулирования радиоактивными или биологически опасными объектами, с которыми человеку может быть трудно справиться. Но теперь они используются во многих отраслях промышленности для выполнения таких задач, как подъем тяжелых предметов, непрерывная сварка с высокой точностью и т. Д. Помимо промышленности, они также используются в больницах в качестве хирургических инструментов. И сегодня врачи широко используют роботов-манипуляторов в своей работе.
Прежде чем рассказать вам о различных типах промышленных манипуляторов , я хотел бы рассказать вам о соединениях.
Соединение имеет две ссылки. Первая — это обычная фиксированная система отсчета. Вторая система отсчета не является фиксированной и будет перемещаться относительно первой системы отсчета в зависимости от положения соединения (или значения соединения), которое определяет его конфигурацию.
Мы узнаем о двух соединениях, которые используются при производстве различных типов промышленных манипуляторов.
1. Вращательное соединение:
Имеют одну степень свободы и описывают вращательные движения (1 степень свободы) между объектами. Их конфигурация определяется одним значением, которое представляет величину вращения вокруг оси z их первой системы отсчета.
Здесь мы видим вращающееся соединение между двумя объектами. Здесь последователь может иметь вращательное движение вокруг своей базы.
2. Призматическое соединение:
Призматические соединения имеют одну степень свободы и используются для описания поступательных движений между объектами. Их конфигурация определяется одним значением, которое представляет величину перемещения по оси z их первой системы отсчета.
Здесь вы можете увидеть различные призматические соединения в одной системе.
Различные типы промышленных манипуляторов
В промышленности используются многие типы промышленных манипуляторов в соответствии с их требованиями. Некоторые из них перечислены ниже.
Некоторые из них перечислены ниже.
- Декартов координатный робот:
В этом промышленном роботе 3 основные оси имеют призматические шарниры или перемещаются линейно относительно друг друга. Декартовы роботы лучше всего подходят для нанесения клея, например, в автомобильной промышленности. Основное преимущество картезианцев заключается в том, что они способны двигаться в нескольких линейных направлениях. А также они могут выполнять прямолинейные вставки и легко программируются. Недостатки декартова робота в том, что он занимает слишком много места, так как большая часть пространства в этом роботе не используется.
- Робот SCARA:
Аббревиатура SCARA расшифровывается как Selective Compliance Assembly Robot Arm или Selective Compliance Articulated Robot Arm. Движения роботов SCARA аналогичны движениям человеческой руки. Эти машины включают в себя как «плечевой», так и «локтевой» сустав, а также ось «запястья» и вертикальное движение. Роботы SCARA имеют 2 вращающихся шарнира и 1 призматический шарнир. Роботы SCARA имеют ограниченные движения, но это также является их преимуществом, поскольку они могут двигаться быстрее, чем другие 6-осевые роботы. Он также очень жесткий и прочный. Они в основном используются в целевом применении, которое требует быстрых, повторяемых и четко сформулированных движений от точки к точке, таких как укладка на поддоны, укладка на поддоны DE, загрузка / разгрузка машины и сборка. Его недостатки в том, что он имеет ограниченные движения и не очень гибкий.
Роботы SCARA имеют 2 вращающихся шарнира и 1 призматический шарнир. Роботы SCARA имеют ограниченные движения, но это также является их преимуществом, поскольку они могут двигаться быстрее, чем другие 6-осевые роботы. Он также очень жесткий и прочный. Они в основном используются в целевом применении, которое требует быстрых, повторяемых и четко сформулированных движений от точки к точке, таких как укладка на поддоны, укладка на поддоны DE, загрузка / разгрузка машины и сборка. Его недостатки в том, что он имеет ограниченные движения и не очень гибкий.
- Цилиндрический робот:
По сути, это манипулятор, который перемещается вокруг стержня в форме цилиндра. Цилиндрическая роботизированная система имеет три оси движения — ось кругового движения и две линейные оси горизонтального и вертикального движения руки. Таким образом, он имеет 1 вращательное соединение, 1 цилиндрическое и 1 призматическое соединение. Сегодня цилиндрические роботы используются реже и заменяются более гибкими и быстрыми роботами, но они занимают очень важное место в истории, поскольку они использовались для захвата и удержания задач задолго до того, как были разработаны шестиосевые роботы. Его преимущество в том, что он может двигаться намного быстрее декартова робота, если две точки имеют одинаковый радиус. Его недостатком является то, что он требует усилий для преобразования из декартовой системы координат в цилиндрическую систему координат.
Его преимущество в том, что он может двигаться намного быстрее декартова робота, если две точки имеют одинаковый радиус. Его недостатком является то, что он требует усилий для преобразования из декартовой системы координат в цилиндрическую систему координат.
- Робот PUMA:
PUMA (программируемая универсальная машина для сборки или программируемая универсальная манипуляторная рука) является наиболее часто используемым промышленным роботом в сборочных, сварочных работах и университетских лабораториях. Он больше похож на человеческую руку, чем на робота SCARA. Он обладает большей гибкостью, чем SCARA, но также снижает точность. Поэтому они используются в менее точных работах, таких как сборка, сварка и перемещение объектов. Он имеет 3 вращательных сустава, но не все суставы параллельны, второй сустав от основания ортогонален другим суставам. Это делает PUMA совместимым по всем трем осям X, Y и Z. Его недостатком является меньшая точность, поэтому его нельзя использовать в критических и высокоточных приложениях.
- Роботы Polar:
Иногда его называют сферическим роботом. Это стационарные манипуляторы со сферическими или почти сферическими рабочими зонами, которые можно позиционировать в полярной системе координат. Они более сложны, чем декартовы роботы и роботы SCARA, но их решение по управлению намного проще. Он имеет 2 вращающихся шарнира и 1 призматический шарнир, чтобы создать почти сферическое рабочее пространство. Его основное применение заключается в погрузочно-разгрузочных операциях на производственной линии и в роботе для захвата и размещения.
С точки зрения конструкции запястья он имеет две конфигурации:
Шаг-рыскание-вращение (XYZ), как человеческая рука, и вращение-тангаж-крен, как сферическое запястье. Сферическое запястье наиболее популярно, потому что его механически проще реализовать. Он демонстрирует уникальные конфигурации, которые можно идентифицировать и, следовательно, избегать при работе с роботом. Сочетание простоты надежных решений и существования уникальных конфигураций благоприятствует сферическому дизайну запястья, и в этом причина его успеха.
Сочетание простоты надежных решений и существования уникальных конфигураций благоприятствует сферическому дизайну запястья, и в этом причина его успеха.
ISO 8373:1994 Управление промышленными роботами. Словарь | 95,99 | ИСО/ТК 184 |
ISO/TR 8373:1988 Управление промышленными роботами. Словарь | 95,99 | ИСО/ТК 184 |
ISO 8373:1994/Amd 1:1996 Управление промышленными роботами. | 95,99 | ИСО/ТК 184 |
ISO 8373:1994/Cor 1:1996 Управление промышленными роботами. Словарь. Техническое исправление 1 | 95,99 | ИСО/ТК 184 |
ISO/TR 8373:1988/Add 1:1990 Управление промышленными роботами — Словарь — Приложение 1 | 95,99 | ИСО/ТК 184 |
ISO 8373:2012 Роботы и роботизированные устройства. | 95,99 | ИСО/ТК 299 |
ISO 8373:2021 Робототехника. Словарь | 60,60 | ИСО/ТК 299 |
ISO 9283:1990 Управление промышленными роботами. Критерии эффективности и соответствующие методы испытаний | 95,99 | ИСО/ТК 184 |
ISO 9283:1990/Amd 1:1991 Манипулирование промышленными роботами. | 95,99 | ИСО/ТК 184 |
ISO 9283:1998 Управление промышленными роботами. Критерии эффективности и соответствующие методы испытаний | 90,93 | ИСО/ТК 299 |
ИСО 9409-1:1988 Управление промышленными роботами. | 95,99 | ИСО/ТК 184 |
ISO 9409-1:1996 Управление промышленными роботами. Механические интерфейсы. Часть 1. Таблички (форма A) | 95,99 | ИСО/ТК 184 |
ISO 9409-1:1996/Cor 1:1998 Манипулирование промышленными роботами. Механические интерфейсы. Часть 1. Таблички (форма A) — Техническое исправление 1 | 95,99 | ИСО/ТК 184 |
ISO 9409-1:2004 Управление промышленными роботами. | 90,20 | ИСО/ТК 299 |
ISO 9409-2:1996 Управление промышленными роботами. Механические интерфейсы. Часть 2. Валы (форма А) | 95,99 | ИСО/ТК 184 |
ISO 9409-2:2002 Управление промышленными роботами. Механические интерфейсы. Часть 2. Валы | 90,93 | ИСО/ТК 299 |
ISO/IEC 9506-3:1991 Системы промышленной автоматизации. | 95,99 | ИСО/ТК 184/ПК 5 |
ИСО/МЭК 9506-3:1991/Кор 1:1993 Системы промышленной автоматизации. Спецификация производственных сообщений. Часть 3. Сопутствующий стандарт для робототехники. Техническое исправление 1 | 95,99 | ИСО/ТК 184 |
ISO/IEC 9506-3:1991/Amd 2:1997 Системы промышленной автоматизации. | 95,99 | ИСО/ТК 184 |
ISO 9787:1990 Управление промышленными роботами. Системы координат и движения | 95,99 | ИСО/ТК 184 |
ISO 9787:1999 Управление промышленными роботами. Системы координат и номенклатура движений | 95,99 | ИСО/ТК 184 |
ISO 9787:2013 Роботы и роботизированные устройства. | 90,93 | ИСО/ТК 299 |
ISO 9946:1991 Управление промышленными роботами. Представление характеристик | 95,99 | ИСО/ТК 184 |
ISO 9946:1999 Управление промышленными роботами. Представление характеристик | 90,93 | ИСО/ТК 299 |
ISO 10218-1:2006 Роботы для промышленных сред. | 95,99 | ИСО/ТК 184 |
ISO 10218-1:2006/Cor 1:2007 Роботы для промышленных сред. Требования безопасности. Часть 1. Робот. Техническое исправление 1 | 95,99 | ИСО/ТК 184 |
ISO 10218-1:2011 Роботы и роботизированные устройства. Требования безопасности для промышленных роботов. Часть 1: Роботы | 90,92 | ИСО/ТК 299 |
ISO/FDIS 10218-1 Робототехника. | 50.00 | ИСО/ТК 299 |
ISO 10218-2:2011 Роботы и роботизированные устройства. Требования безопасности для промышленных роботов. Часть 2. Роботизированные системы и интеграция | 90,92 | ИСО/ТК 299 |
ISO/FDIS 10218-2 Робототехника. Требования безопасности. Часть 2. Системы промышленных роботов, приложения для роботов и роботизированные ячейки | 50. 00 00 | ИСО/ТК 299 |
ISO 10218:1992 Управление промышленными роботами. Безопасность | 95,99 | ИСО/ТК 184 |
ISO 10218:1992/Cor 1:1994 Управление промышленными роботами. Безопасность. Техническое исправление 1 | 95,99 | ИСО/ТК 184 |
ISO/TR 10562:1995 Управление промышленными роботами. | 95,99 | ИСО/ТК 184 |
ISO/TR 11032:1994 Управление промышленными роботами. Испытания, ориентированные на применение. Точечная сварка | 95,99 | ИСО/ТК 184 |
ISO/TR 11062:1994 Управление промышленными роботами. Методы испытаний на электромагнитную совместимость и критерии оценки эффективности. Руководство | 95,99 | ИСО/ТК 184 |
ISO 11593:1996 Манипулирование промышленными роботами. | 95,99 | ИСО/ТК 299 |
ISO 11593:2022 Роботы для промышленных условий. Автоматические системы замены рабочих органов. Словарь | 60,60 | ИСО/ТК 299 |
ISO/TR 13309:1995 Управление промышленными роботами. Информационное руководство по испытательному оборудованию и метрологическим методам работы для оценки производительности роботов в соответствии с ISO 9283 | 60,60 | ИСО/ТК 299 |
ISO 13482:2014 Роботы и роботизированные устройства. | 90,92 | ИСО/ТК 299 |
ISO 14539:2000 Манипулирование промышленными роботами. Манипулирование объектами с помощью захватных устройств. Словарь и представление характеристик | 90,93 | ИСО/ТК 299 |
ISO/TS 15066:2016 Роботы и роботизированные устройства. Коллаборативные роботы | 90,60 | ИСО/ТК 299 |
ISO 15187:2000 Управление промышленными роботами. | 95,99 | ИСО/ТК 184 |
ISO 18646-1:2016 Робототехника. Критерии эффективности и соответствующие методы испытаний для сервисных роботов. Часть 1. Передвижение колесных роботов | 90,93 | ИСО/ТК 299 |
ISO 18646-2:2019 Робототехника. | 90,92 | ИСО/ТК 299 |
ISO/CD 18646-2 Робототехника. Критерии эффективности и соответствующие методы испытаний для сервисных роботов. Часть 2: Навигация | 30,99 | ИСО/ТК 299 |
ISO 18646-3:2021 Робототехника. Критерии эффективности и соответствующие методы испытаний для сервисных роботов. | 60,60 | ИСО/ТК 299 |
ISO 18646-4:2021 Робототехника. Критерии эффективности и соответствующие методы испытаний для сервисных роботов. Часть 4. Роботы для поддержки нижней части спины | 60,60 | ИСО/ТК 299 |
ISO 19649:2017 Мобильные роботы. Словарь | 90,60 | ИСО/ТК 299 |
ISO/TR 20218-1:2018 Робототехника. | 60,60 | ИСО/ТК 299 |
ISO/TR 20218-2:2017 Робототехника. Проектирование безопасности промышленных робототехнических систем. Часть 2. Станции ручной загрузки/разгрузки | 60,60 | ИСО/ТК 299 |
ISO 22166-1:2021 Робототехника. | 60,60 | ИСО/ТК 299 |
ISO/CD 22166-201 Робототехника. Модульность сервисных роботов. Часть 201. Общая информационная модель для модулей | 30,99 | ИСО/ТК 299 |
ISO/CD 22166-202 Робототехника. Модульность сервисных роботов. Часть 202. Информационная модель для программных модулей | 30. 20 20 | ИСО/ТК 299 |
ISO/TR 23482-1:2020 Робототехника. Применение ISO 13482. Часть 1. Методы испытаний, связанные с безопасностью | 60,60 | ИСО/ТК 299 |
ISO/TR 23482-2:2019 Робототехника. Применение ISO 13482. Часть 2. Руководство по применению | 60,60 | ИСО/ТК 299 |
ISO/DIS 31101 Робототехника. | 40,60 | ИСО/ТК 299 |
 Словарь. Поправка 1: Приложение B. Многоязычное приложение
Словарь. Поправка 1: Приложение B. Многоязычное приложение Словарь
Словарь Критерии эффективности и соответствующие методы испытаний. Поправка 1: Руководство по выбору критериев эффективности для типичных применений
Критерии эффективности и соответствующие методы испытаний. Поправка 1: Руководство по выбору критериев эффективности для типичных применений Механические интерфейсы. Часть 1. Циркуляр (форма A)
Механические интерфейсы. Часть 1. Циркуляр (форма A) Механические интерфейсы. Часть 1: Таблички
Механические интерфейсы. Часть 1: Таблички Спецификация производственных сообщений. Часть 3. Сопутствующий стандарт для робототехники
Спецификация производственных сообщений. Часть 3. Сопутствующий стандарт для робототехники Спецификация производственных сообщений. Часть 3. Сопутствующий стандарт для робототехники. Поправка 2: соответствие
Спецификация производственных сообщений. Часть 3. Сопутствующий стандарт для робототехники. Поправка 2: соответствие Системы координат и номенклатура движений
Системы координат и номенклатура движений Требования безопасности. Часть 1. Робот
Требования безопасности. Часть 1. Робот Требования безопасности. Часть 1. Промышленные роботы
Требования безопасности. Часть 1. Промышленные роботы Промежуточный код для роботов (ICR)
Промежуточный код для роботов (ICR) Автоматические системы замены рабочих органов. Словарь и представление характеристик
Автоматические системы замены рабочих органов. Словарь и представление характеристик Требования безопасности к роботам для личной гигиены
Требования безопасности к роботам для личной гигиены Графические пользовательские интерфейсы для программирования и управления роботами (GUI-R)
Графические пользовательские интерфейсы для программирования и управления роботами (GUI-R) Критерии эффективности и соответствующие методы испытаний для сервисных роботов. Часть 2. Навигация
Критерии эффективности и соответствующие методы испытаний для сервисных роботов. Часть 2. Навигация Часть 3. Манипуляции
Часть 3. Манипуляции Проектирование безопасности промышленных робототехнических систем. Часть 1. Концевые рабочие органы
Проектирование безопасности промышленных робототехнических систем. Часть 1. Концевые рабочие органы Модульность сервисных роботов. Часть 1. Общие требования
Модульность сервисных роботов. Часть 1. Общие требования Прикладные услуги, предоставляемые сервисными роботами. Требования к системам управления безопасностью
Прикладные услуги, предоставляемые сервисными роботами. Требования к системам управления безопасностьюЧто такое робот-манипулятор? Руководство
Все части робота играют роль в его работе и определяют, для каких задач он может быть использован. Таким образом, глубокое понимание таких деталей будет первым шагом к выбору подходящего промышленного робота для ваших нужд. Хотя есть много частей, которые нужно рассмотреть, возможно, было бы полезно начать с одной из ключевых; робот-манипулятор.
Содержание
Что такое роботизированная манипуляция?
Робот — это машина, запрограммированная на автоматическое предсказуемое выполнение определенных задач. Для этого он должен обрабатывать объекты и либо перемещать их, либо воздействовать на них с помощью таких действий, как сварка или сверление. Именно эта обработка или процедуры, выполняемые над объектами, называются роботизированными манипуляциями. Таким образом, это определение дает нам контекст для определения роботов-манипуляторов.
Именно эта обработка или процедуры, выполняемые над объектами, называются роботизированными манипуляциями. Таким образом, это определение дает нам контекст для определения роботов-манипуляторов.
Робот-манипулятор представляет собой рукоятку, соединенную с телом робота и используемую для выполнения задач. Робот без манипулятора был бы эквивалентом человека, выполняющего задачу со связанными за спиной руками, это просто нежизнеспособно. Именно по этой причине роботы-манипуляторы также известны как роботы-манипуляторы.
Из чего состоят роботы-манипуляторы?
Источник: Kawasaki
Роботы-манипуляторы состоят из ряда соединений и звеньев, слитых во внутреннюю структуру. Снаружи 9Рука робота-манипулятора 0853 , кажется, установлена только на роботе. Однако ряд соединений и звеньев уходит дальше в тело робота, чтобы связать их. Это гарантирует совместную работу робота и манипулятора в скоординированных движениях жидкости.
Звенья — это жесткие компоненты, объединяющие различные части робота. Несмотря на то, что их жесткость обеспечивает прочную конструкцию, это затрудняет перемещение частей робота во время выполнения задач. В результате к звеньям добавляются суставы для повышения гибкости. Соединения — это подвижные компоненты, которые скользят друг относительно друга, обеспечивая линейное, вращательное или вращательное движение частей робота. Они построены и работают так же, как человеческий локоть или колено.
Несмотря на то, что их жесткость обеспечивает прочную конструкцию, это затрудняет перемещение частей робота во время выполнения задач. В результате к звеньям добавляются суставы для повышения гибкости. Соединения — это подвижные компоненты, которые скользят друг относительно друга, обеспечивая линейное, вращательное или вращательное движение частей робота. Они построены и работают так же, как человеческий локоть или колено.
Роботы-манипуляторы в различных роботах
Источник: www.brainkart.com
Типы и количество соединений, которые есть у робота-манипулятора, определяют его степени свободы, форму его рабочей зоны и способы его применения. . Это, в свою очередь, определяет, как робот классифицируется. Для иллюстрации рассмотрим различные типы роботов и конструкции их роботов-манипуляторов.
Декартовский робот- его манипуляторы связаны с помощью 3 призматических соединений, которые перпендикулярны друг другу и обеспечивают только линейные скользящие движения. В результате декартовый робот классифицируется как 3-осевой робот и имеет геометрическую рабочую зону.
В результате декартовый робот классифицируется как 3-осевой робот и имеет геометрическую рабочую зону.
Полярный робот- рука и тело полярного робота соединены с помощью вращающегося шарнира. Этот тип соединения обеспечивает круговые движения, которые позволяют манипулятору полярного робота перемещаться в пределах 3 осей в системе полярной геометрии.
Цилиндрический робот- цилиндрический манипулятор робота работает с использованием поворотного шарнира в основании и линейного шарнира, который позволяет ему двигаться вдоль вертикальной оси. Установка этих шарниров позволяет манипулятору удлиняться и втягиваться, но его рабочий диапазон по-прежнему довольно ограничен небольшой цилиндрической формой.
Робот SCARA – шарниры робота SCARA вращаются и облегчают его движения по осям XY, оставаясь при этом жесткими по оси Z. Благодаря тому, что суставы расположены в горизонтальной плоскости, роботы SCARA имеют широкие рабочие зоны полукруглой формы.
Шарнирный робот – Шарнирный робот имеет самые гибкие манипуляторы среди всех других роботов. Рука робота-манипулятора соединена с корпусом робота поворотным соединением, а локоть и другие части руки связаны вращательными соединениями. Вращающиеся шарниры позволяют руке вращаться, наклоняться и рыскать, создавая таким образом 6-осевой робот.
Применение роботов-манипуляторов
Гибкость различных роботов-манипуляторов может быть использована для автоматизации процессов в различных отраслях. Примеры такого применения включают:
Роботизированная хирургия- В этом приложении шарнирный робот-манипулятор оснащен хирургическими инструментами в качестве концевых эффекторов. Он управляется удаленно хирургом для выполнения хирургических маневров.
Самовывоз – — это обычное промышленное приложение, в котором роботы-манипуляторы применяются для повторяющихся задач захвата и размещения, таких как упаковка товаров.