Промышленный робот — Википедия
Материал из Википедии — свободной энциклопедии
 Работающие промышленные роботы FANUC модели R2000iB
Работающие промышленные роботы FANUC модели R2000iB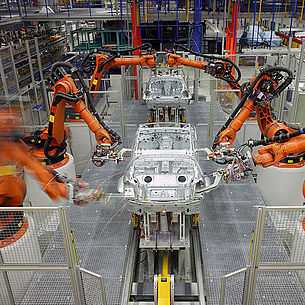 Промышленные роботы KUKA на автомобильном производстве
Промышленные роботы KUKA на автомобильном производствеПромы́шленный ро́бот — предназначенный для выполнения двигательных и управляющих функций в производственном процессе манипуляционный робот, т. е. автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций[1][2].
В литературе на русском языке получило распространение следующее определение промышленного робота, взятое из ГОСТ 25686-85[3]: это — «автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций». В промышленности, впрочем, наряду с манипуляционными роботами, получившими наибольшее распространение, используют также мобильные (локомоционные), информационные, информационно-управляющие, комплексные и другие виды промышленных роботов
Промышленные роботы обычно являются одним из компонентов автоматизированных производственных систем, применяемых в гибком автоматизированном производстве (РТК, РТЯ, РТУ, РТЛ, РТС, ГПЛ и т. п.), которые при неизменном уровне качества позволяют увеличить
ru.wikipedia.org
Промышленные роботы манипуляторы, применение в производстве
Система промышленных роботов
Что вы должны знать о промышленных роботах и о их системах? Зависит от того, почему вы ищете эту информацию. В этой статье мы постараемся рассмотреть наиболее распространенные вопросы, касающиеся роботов, используемых в промышленной среде.

Не каждое механическое устройство, используемое в промышленной среде, можно рассматривать как робот. Как определено ISO (Международной организацией по стандартизации), промышленный робот является автоматически управляемым, перепрограммируемым многоцелевым манипулятором, программируемым тремя или более осями.
Это в значительной степени принятое определение, которое используется при разговоре о промышленных роботах. Однако, будучи немного философом, я хотел бы добавить к нему несколько мыслей. Как вы можете прочитать на домашней странице этого сайта, вопрос о том, что можно считать роботом, а что нет, не так просто. Промышленная робототехника до недавнего времени сумела избежать этой путаницы.
Такие люди, как гениальные инженеры и предприниматели, находят все больше и больше способов, как робототехника может помочь оптимизировать рабочий процесс в промышленной среде. Благодаря достижениям в области технологий аккумуляторов и беспроводных сетей давно установленное роботизированное орудие должно прокладывать путь к новичкам, таким как swarm AGVs (Automated Guided Vehicles), используемые в складировании.
Системы управления промышленными роботами
Типичный промышленный робот состоит из инструмента, промышленного роботизированного кронштейна, шкафа управления, панели управления, учебного кулона, а также другого периферийного оборудования.
Инструмент (также называемый конечным эффектором) — это устройство, предназначенное для конкретной задачи, например: сварка или покраска. В основном это робот, который перемещает инструмент. Осторожно! Важно понимать, что не каждый промышленный робот похож на руку. Существуют различные типы различных структур роботов.
Шкаф управления напоминает мозг робота. Панель управления и учебный кулон составляют пользовательскую среду. Эти части обычно объединяются.
Панель управления предназначена для использования оператором для выполнения некоторых обычных задач. Например, изменение программ или управление периферийными устройствами. В то время как учебный кулон обычно используется только во время программирования, хотя его можно подключить к шкафу управления, если для выполнения программы требуется дополнительная память.
Применение промышленных роботов
В идеале применение промышленных роботов должно быть беспроигрышной ситуацией. Вы знаете, что есть задания, которые никто не хочет делать. Это те повторяющиеся, утомительные работы, которые требуют много монотонного действия со стороны рабочего, например, что-то собирать с одного конвейера на другой.
Если это всегда одна и та же задача, вы можете использовать автоматическое решение, специально разработанное для ваших нужд. Что, если это не так? Ситуация, когда фабрика должна быть все более гибкой, становится все более распространенной. В этих случаях правильным решением может быть перепрограммируемый робот, который может использоваться для различных задач.
Кроме того, вы должны рассмотреть «робота-работника» для тех задач, которые опасны для человека-работника. Например, обработка поверхности опасными химикатами и работа в опасной окружающей среде. Во многих случаях, как и упомянутые, в долгосрочной перспективе разумнее и дешевле использовать робота, чем нанимать рабочего.
И конечно же, есть работы, которые очень необходимы людям. Как снятие очень тяжелых весов или работа в условиях, непригодных для жизни человека. Опять же, во многих из этих случаев могут применяться специальные автоматизированные решения. Однако, если требуется гибкость, следует учитывать робота.
Вот список наиболее часто встречающихся приложений для роботов:
- Дуговая сварка,
- сборочный,
- покрытие,
- Deburring,
- Литье под давлением,
- молдинг,
- Обработка материалов,
- собирание,
- Паллетирование,
- упаковка,
- Точечная сварка,
- Транспорт,
- складирование.
Структура промышленных роботов и манипуляторов
Существуют различные способы создания робота. В некоторых случаях это вообще не напоминает руку. В этой статье я расскажу только о наиболее распространенных типах структур роботов, которые используются в промышленной робототехнике.
Итак, есть:
- картезианский,
- цилиндрический,
- сферический,
- SCARA,
- Шарнирное плечо,
- Параллельная конструкция.
Почему это важно? Как вы уже знаете (или догадались), каждый из этих типов конструкций имеет свои сильные и слабые стороны. Некоторые более точны, некоторые могут поднять тяжелый вес, а некоторые — дешевле.
Как выбрать поставщика промышленных роботов?

Именно, вы должны оценить, какая задача будет поручена роботу. Сначала это может показаться глупым. Вы наверное, уже знаете, что вам нужен робот для дуговой сварки, например. Однако вы можете подумать более глубоко.
Может быть, есть возможность расширения? Если да, возможно, позже могут быть другие или несколько разные задачи, которые могут быть назначены одному и тому же роботу? Может быть, одна и та же промышленная роботизированная рука может использоваться с разными инструментами в разное время?
Вы должны учитывать такие возможности, поскольку это может сэкономить вам (или вашему работодателю) много денег.
Техническая поддержка. Рядом находится дилер? Вероятно, вам нужно будет проинструктировать сотрудников, получить обновления программного обеспечения, гарантийное обслуживание и т.д. Дилер должен располагаться как можно ближе к вам. Чем дальше находится ваш дилер робота, тем дольше будет ваше время простоя, если потребуется техническое обслуживание, и чем выше будут затраты на обучение персонала.
Конечно, могут быть исключения. Возможно, у вас есть конкретная задача, и единственные, которые могли бы предоставить необходимый робот, далеки. В противном случае вы должны действительно выбрать ближайшего к вам интегратора роботов.
Ваш завод. Вы действительно не должны забывать проверить, имеются ли все необходимые средства для работы конкретного робота на вашем заводе. Куда вы поместите его? Все ли необходимые подключения доступны на будущем сайте робота? Они могут включать в себя электричество, IO, Ethernet, Serial и т.д.
То же самое, что я упомянул в части задачи, также следует учитывать при рассмотрении технической поддержки и вашей фабрики — попытайтесь оценить будущие возможности.
Производители промышленных роботов в России и в Мире
Вот список самых известных производителей промышленных роботов относятся:
- ABB,
- Технология Adept,
- Asyst Technologies,
- Автоматизация Брукс,
- DENSO робототехника,
- Роботы Epson,
- FANUC робототехника,
- Intelitek,
- Тяжелая промышленность Кавасаки,
- Робототехника KUKA,
- Yaskawa-Motoman,
- Роботизированные системы Nachi,
- Reis робототехника,
- Toshiba Machine,
- Штойбли.
robroy.ru
Промышленные роботы — Слесарно-механосборочные работы
Промышленные роботы
Категория:
Слесарно-механосборочные работы
Промышленные роботы
Развитие автоматизации производственных процессов привело к появлению принципиально новых устройств для выполнения вспомогательных и даже сборочных операций — машин с человекоподобными действиями, которым дали название роботы. Роботы производят такие операции, как установку и съем заготовок и готовых деталей, погрузку и разгрузку, сборку, сварку, включение и выключение оборудования. Эти новые средства автоматизации выделены в особый класс Устройств — «промышленные роботы».
Промышленный робот — это устройство с программным управлением, выполняющее автоматически вспомогательные (установка, съем, погрузка, разгрузка) и технологические опера, ции (сборка, сварка, пайка, окраска) в процессе изготовления изделия.
Все промышленные роботы имеют «руку», которую называют манипулятором, механизм для захвата и подачи предмета обработки или средства обработки.
Робот обычно состоит из манипулятора, блока программного управления, двигателя, движителя, регистрирующих и анализирующих блоков (датчиков), блоков управления, телекамеры, дальномера. Основные устройства монтируются на специальной раме или в жестком кожухе. Рама крепится к полу или подвесу неподвижно, а также может иметь движители — колеса, ролики для перемещения по полу, направляющим рельсам или платформам. Пульт управления может выполняться выносным или на роботе. Выносные пульты могут обслуживать сразу несколько специальных роботов, работающих по жесткой программе действия.
В качестве силовых агрегатов роботов используют гидравлические и пневматические станции, которые могут быть автономными или выносными.
На рис. 1 представлена функциональная схема робота. Робот УМ-1 имеет пять степеней свободы, не считая движения схвата. Рука робота перемещается в цилиндрической системе координат, т. е. два ее движения прямолинейны. Движение руки осуществляется от упора до упора. Положение упоров регулируется в зависимости от требуемой величины хода. Кисть с захватом поворачивается гидроцилиндрами поворота кисти. Манипулятор перемещается по каретке, которая расположена на колонне.
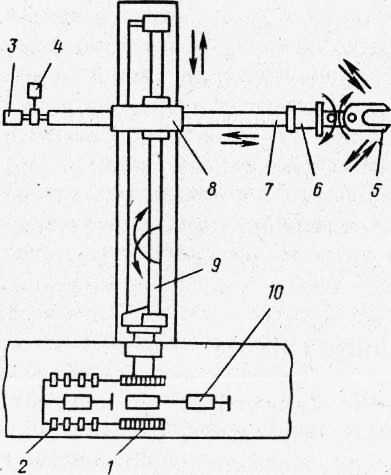
Рис. 1. Функциональная схема робота: 1 — зубчатая передача, 2 – гидроцилиндр поворота колонки, 3, 4 – гидроцилиндры поворота кисти, 5 – захват, 6 – кисть, 7 – рука, 8 — каретка, 9 – колонна, 10 — гидроамортизатор
Положение манипулятора и траектории его перемещения программируется. Обучение производится вручную с пульта ручного управления путем последовательного проведения руки робота по заданным точкам программы, и при этом определяются фактические координаты заданных точек. При ручном обучении программа записывается на перфоленту В системе управления роботом имеется устройство синхронизации работы с технологическим оборудованием, с помощью которого обеспечивается рабочий цикл обработки заготовки. По полученным командам робот снимает со станка готовую деталь и устанавливает новую заготовку.
Широкое применение находят роботы, у которых запись программы осуществляется по методу самообучения. Оператор при наладке перемещает руку с захватом в расчетные точки траектории движения. Положение манипулятора фиксируется в виде сигналов от кодовых датчиков в блоке памяти на магнитном барабане в определенной последовательности. После окончания обучения робот выполняет работу самостоятельно.
Роботы, выполняющие технологические процессы, имеют более совершенную память, которая позволяет получить информацию о внешней среде от различного типа датчиков. Роботы такого типа определяют наличие, положение и размеры предмета в рабочей зоне, контролируют величину усилия зажима.
На рис. 2 показана схема работы робота при сборке. Левый манипулятор должен взять болт и вставить его в отверстие детали, прежде определив его положение. Правый манипулятор должен взять гайку, определить положение болта и навернуть гайку. Датчики усилий определяют усилие затяжки и число витков. Самостоятельность робота в выборе решений определяется заложенным алгоритмом программы. Если гайка выполнена с меньшим резьбовым отверстием, то возрастает контролируемое усилие затяжки и робот возвращает гайку на предметный стол. Деталь удерживается манипулятором. Весь процесс управляется ЭВМ.

Рис. 2. Схема работы сборочного робота: 1 – левый манипулятор, 2 – болт, 3 – собираемая деталь, 4 – манипулятор, 5 — гайка, 6 — правый манипулятор
Читать далее:
Планирование промышленного производства
Статьи по теме:
pereosnastka.ru
Автоматизированный завод. Промышленные роботы на производстве
Пром роботы в культурном сектореВведение:
Экономика многих стран развивается в первую очередь за счет промышленности. Промышленные предприятия, такие как металлургические комбинаты, машиностроительные заводы, нефтеперерабатывающие концерны и фабрики легкой промышленности приносят ежегодно более 40 % прибыльности государств. И так как большинство индустриальных предприятий нашей страны приватизировано, речь идет об очень прибыльном бизнесе.
В промышленном бизнесе качество и производительность – это визитная карточка при работе с поставщиками и клиентами. Чем выше требования к качеству выпускаемой продукции, тем актуальнее становится внедрение современных технологий.
Предприятия внедряют роботизированные системы в производство в первую очередь для увеличения прибыли за счет сокращения рабочей силы. В Японии, Китае и США почти все промышленные заводы оснащены «по последнему слову техники». На них работает минимум работников, что обеспечивает низкую себестоимость выпускаемой продукции. В России и Украине применение роботизированных устройств пока ограничено. Устаревшее оборудование на предприятиях приводит к снижению эффективности и количества производства. И к тому же наносит вред окружающей среде. Для увеличения производства и качества продукции, компаниям необходимо позаботится об обновлении оборудования.
В наше время автоматизированные устройства для работы на заводах представлены в широком ассортименте. Роботы успешно используются в металлургии, машиностроении, легкой и пищевой промышленности. Они способны заменить человека в тяжелых и опасных условиях труда. Предоставляют скорость, точность, качество, а также высокую окупаемость. Это достижимо путем того, что роботам не нужно платить зарплату, оплачивать отпуск и обеспечивать соцпакетом.
Мы предлагаем вам узнать полезную информацию об автоматизированных системах и промышленных роботах, а также о выгодном применении этих устройств на промышленных предприятиях.
Автоматизированные линии производства:
Предприятия массового и мелкосерийного производства нуждаються в установлении автоматизированных линий производства. Эти механизмы представляют собой машины непрерывного режима работы в виде взаимосвязанных станков. Автоматические линии производятся во многих странах мира, в том числе в России и Украине и поставляются по цене от $10 000. Современные отечественные производственные линии заводов Днепропетровска, Донецка и Запорожья служат на комплексно-автоматизированных цехах по изготовлению различной продукции, включая функции обработки, контроля и сборки.
Механизмы управляються компьютером и позволяют осуществлять обработку деталей по динамичной технологии. В соответствии с требованием оптимальной загрузки станков частично изменяется порядок и маршрут обработки деталей. Компьютер планирует запуск и выпуск деталей, выполняет плановые, диспетчерские расчеты и рассчитывает режимы обработки в соответствии с избранным алгоритмом.
К производственным линиям относятся автоматические машины непрерывного литья заготовок (МНЛЗ). Современные машины непрерывного литья заготовок представляют собой целый комплекс сложного оборудования: механического, гидравлического, систем охлаждения и смазки, а также электроприводов с автоматизированной системой управления технологическим процессом. Установка данного устройства обеспечивает значительное сокращение потери металла, улучшение условий труда, постоянство условий производства и повышение производительности комбината.
Мартеновские печи и кислородные конвертеры уже давно не актуальные при производстве стали на металлургических комбинатах. Серьезные капитальные вложения на внедрение новейших технологий (печи-ковши, электропечи, электрометаллургические мини-заводы и непрерывное литье стали) на заводах Украины и России, будут гарантировать производительность в 1 млн. 320 тыс. тонн высококачественной стальной заготовки в год.
Универсальные роботы-манипуляторы:

Манипуляторы на заводах используются уже с середины 20-го века. Эти устройства представляют собой автоматизированный механизм, оборудованный специальным отличительным инструментом – так называемой «рукой» манипулятора. Эта «рука» и служит основным действующим органом в различных целях. Если это робот для сварки, рука-манипулятор выполняет сварочные операции, если робот-укладчик, рука служит для укладки и упаковки продукции. Естественно, принцип действия манипулятора зависит от его программирования и оснащения.
Разнообразие роботов-манипуляторов стремительно набирает обороты. На сегодняшний день существует 30 видов манипуляторов. Компании-производители промышленной робототехники представляют свои изобретения, начиная от универсальных манипуляторов до формовщиков готовой продукции. Эти устройства намного доступней, чем кажется, и сегодня даже среднестатистическое предприятие в год может позволить прибрести себе пару подобных механизмов по цене в среднем 2500 долларов за штуку.
Начните с универсальных роботов-манипуляторов. Универсальные промышленные роботы – это высокотехнологичные устройства, служащие для решения задач, связанных с автоматизацией производства. Применяются в основном в машиностроении и металлургии для сварки, резки, обслуживания станков, покраски, полировки, наплавки, механической обработки, распределения клея и наполнителей, плазменного напыления, перемещения грузов и паллетирования.
Компании ABB, Kawasaki и FANUC поставляют универсальных промышленных роботов по цене от 2000 до 4000 долларов в зависимости от функциональности устройства. Данные аппараты способны увеличить скорость и качество обработки деталей, но основными недостатками данных устройств являются неполноценное взаимодействие всех компонентов и невозможность проведения точнейших операций.
На современных машиностроительных и металлургических заводах широкого применения обретают «узкоспециальные» роботы-манипуляторы. Самыми распространенными являются роботы для сварки. Производства, изготавливающие ограниченное количество продукции, могут извлечь выгоду из внедрения автоматизации систем сварки. Этот процесс позволяет сократить количество квалифицированных сварщиков, так как робот работает в 8 раз эффективней человека.
Роботы-сварщики:

Сварочные манипуляторы представляют собой комплекс передовых технологий и комплектующих деталей, запрограммированных на выполнение дуговой и точечной сварки объектов. Манипуляторы служат для сварки ёмкостей, кранов, балок и цистерн. Устройства производят сварку стыковых и угловых швов, сварку прямолинейных и кольцевых швов и другие работы, требующие крайней точности. Преимущества автоматизированной сварки очевидны: манипуляторы обеспечивают высокое качество сварки и идентичность готовой продукции; снижают брак при обработке деталей; увеличивают скорость производства. Внедрение сварочных роботов в производство позволяет предприятиям сократить время изготовления продукции, включая сбор в сварочном кондукторе и процесс сварки с 30 до 7 минут.
При выборе поставщиков сварочного оборудования стоит принимать во внимание, какие компании производители могут дать гарантии качества своих устройств. Самыми квалифицированными специалистами в области автоматизированной сварки являются компании KUKA и Kawasaki. Они поставляют манипуляторы для сварки по цене в среднем $2300 и по отзывам промышленников, которые уже внедрили роботов данных компаний, устройства действительно надежны, эффективны и легки в эксплуатации.
Роботы-сборщики:

Далее рассмотрим манипуляторы для автоматической сборки деталей. Как показывают экономические исследования Московского государственного университета, до 25% всего производственного времени уходит на сборочные операции. Сборочные роботы-манипуляторы в основном представляют собой 6-ти осевые устройства с 6-тью степенями свободы, которые приводятся в действие за счет системы сервоприводов.
Сборочные роботы компаний iRobot и MOTOMAN являются одними из лучших механизмов для автоматизированной сборки. Они доступны на рынке промышленной автоматики по цене в среднем от 2000 долларов. Роботы предлагают высококачественную сборку продукции, поднимая производительность труда на 10-20% и снижая брак на 30-40%. Наибольший эффект от использования сборочных роботов достигается при полной автоматизации всей линии производства.
Роботы-резчики:

Предприятия металлургической промышленности также зачастую используют манипуляторы для резки металла — самостоятельные антропоморфные механизмы. Современные роботы для резки выпускаются с системой отслеживания текущего положения заготовки. По конструкции манипулятор для резки металла – один из самых сложных механизмов. Важным элементом робота является датчик контакта головки инструмента с металлической поверхностью. Бортовой компьютер обеспечивает точность позиционирования до 0,05 мм, чего достаточно для обработки даже небольших деталей, а так же заготовок, требующих особо точной резки. При выборе данных устройств, стоит учесть, что манипулятор должен обладать большой степенью подвижности, что обуславливает наличие большого количества осей и приводов. Такие машины могут предложить компании Daihen и Kawasaki стоимостью по ~ $1300 за шт. Наряду с невысокой стоимостью данные устройства обеспечивают стабильное и точное выполнение резки металла.
Роботы-маляры:

Важным элементом машиностроительных предприятий является окрасочное оборудование. Робототехника успела добиться существенных достижений в области данных устройств. Например, компании Adept и Triton поставляют роботов-манипуляторов для окраски по цене от 2500 долларов. Данные машины оснащены специальными пульверизаторами для окраски деталей и обладают повышенной гибкостью для защиты шлангов при подачи в рабочую зону красящего вещества от механических воздействий, скручивания и излома, загрязнения и запыления, что просто невозможно для выполнения людьми вручную.
Гибочные роботы:

Новаторством на предприятиях тяжелой промышленности является применение гибочных роботов. Робот для гибки – это простой автоматизированный станок, как правило, с гидравлическим или электрическим приводом. В качестве захватывающего приспособления устройства может использоваться как обычный манипулятор, так и пневматические присоски. Основным поставщиком гибочных манипуляторов является компания ROBOMAC, которая предоставляет современные устройства по цене $3165. Устройства способны осуществлять загрузку объекта в гибочную головку, подачу, поворот объекта и выгрузку после гибки. Как правило, результатом становится гибкая система, не требующая никаких дополнительных устройств для работы.
Роботы-грузчики:

В тяжелой и легкой промышленности не обойтись без грузоподъемных средств. Компании ABB, KUKA, FANUC и Epson предоставляют решения в области подъема тяжелых грузов весом больше тонны и транспортировку их от комбината до склада. Мощнейшие системы выполняют приёмку и отправку груза с невероятной скоростью и эффективностью. Стоимость данных «подъемников» зависит от количества и скорости подъема груза и колеблется между 1900 и 4000 долларов США.
Роботы-упаковщики:

Необходимость в сокращении времени внутрипроизводственной логистики, вредная для здоровья среда, тяжелый человеческий труд вызывает потребность в автоматизации процессов паллетирования. Скорость и точность работы роботов-паллетайзеров, несравнимы с человеческим трудом, а эффективность и универсальность значительно выше, чем у стандартной машины для паллетирования. Стоимость данных роботов достаточно высока. К примеру, арендовать на четыре месяца паллетайзер от OKURA стоит $80 000.
Предприятия легкой и пищевой промышленности заинтересованы в быстрой и качественной упаковке продукции с конвейера. Компании KOMATEC, Packmore и Epson предлагают выгодные решения для автоматизированной упаковки готовых изделий. Машины оснащены гибкой рукой-манипулятором, которая позволяет им с ловкостью и осторожностью упаковывать даже самые хрупкие предметы, не разбивая их в отличии от людей-упаковщиков. К примеру, робот-упаковщик от KOMATEC по цене $3700, действует таким образом: просматривает движение конвейера, определив изделие, получает сигнал на электронный блок управления, а тот, в свою очередь, подает команду механической руке взять изделие. Как видим, все движения робота совершаются по программе. Это способствует качественному и быстрому процессу упаковки объектов.
Роботы-сортировщики:

Далее рассмотрим подобных робоупаковщикам манипуляторов-сортировщиков. Эти устройства также оснащены рабочим инструментом и рядом датчиков определения продукции для точной её сортировки. К основным производителям «сортировщиков» относятся MOTOMAN и LEGO. Приобрести их устройства стало как никогда выгодно — от 2800 долларов.
Стоить отметить, что разнообразие манипуляторов не ограничивается вышеперечисленными устройствами. Компании-производители активно занимаются разработкой и внедрением роботизированных систем для наплавки, формовки, полировки и механической обработки продукции, которые с каждым днем становятся всё доступнее для промышленных предприятий.
Роботы для работы с опасными веществами:

Если вы являетесь владельцем химического завода или нефтеперерабатывающего предприятия, вам следует позаботиться о фильтрации рабочего помещения. Современные устройства фильтрации представляют собой различные газо- и пылеулавливатели, а также аппараты для работы с радиоактивными веществами. Газоулавливатели особенно хорошо представлены в ассортименте компании Блиц по цене 700 долларов.
Работа с радиоактивными веществами крайне опасна для человека, поэтому ученые активно работают над разработкой роботов для службы на химических предприятиях. Газо- и пылеулавливатели используются для утилизации опасных для здоровья человека веществ, газов и пыли и способствуют очищению воздуха. Установка одного такого устройства, например пылеулавливателя компании Torit, стоит около 3200 долларов. На крупном предприятии достаточно установить по одному пылеулавливателю в каждом цеху, и чистый воздух и безопасная среда труда гарантированы.
Нефтеперерабатывающие предприятия зачастую нуждаются в качественной проверке трубопроводов на коррозию. Эта проверка очень важна, так как из-за неисправности труб опасные ядовитые вещества могут попадать в окружающую среду и наносить пагубный на неё вред. Проверка трубопроводов изнутри людьми возможна, но лучше переложить этот процесс на роботов. Для проверки трубопроводов на коррозию служит «крошечный робопатруль». Лаборатории и компании робототехники, к примеру, SoCalGas, занимаются разработкой миниатюрных роботов, оснащенных камерами и датчиками, которые самостоятельно перемещаются по трубам и передают видеосъемку в режиме реального времени. На данный момент пока неизвестно, когда роботы будут доступны для продажи и по какой цене, но исследователи уверяют, что стоимость этих удивительных устройств не будет заоблачной.
Программное обеспечение для промышленной автоматики:
Программное обеспечение, как правило, для промышленных роботов пишется с ноля и разрабатывается отдельно для каждого робота. Принцип действия робота зависит от его запрограммированного интеллекта. Ведущие производители промышленной робототехники KUKA, FANUC, MOTOMAN и АВВ уделяют данному вопросу особое внимание и вкладывают приличные средства в разработку программного обеспечения для своих устройств.
Высокоинтеллектуальные роботы способны выполнять все свои движения в соответствии с требующейся манипуляционной операцией. При этом в память устройства управления записывается программа с необходимыми координатами и технологической информацией. Отличительными особенностями промышленных машин, наделенных высокими интеллектуальными способностями, являются:
отсутствие электропривода
высокая точность позиционирования детали за счет расположения органов управления
самостоятельно обслуживаемые механизмы и детали.
Снабженные независимыми приводами и высокоэффективными механизмами, интеллектуальные роботы являются наилучшим выбором для ведения любых точных машиностроительных работ, подходят для подъема грузов, а также применяются в авто- и железнодорожном транспорте.
На данный момент полностью автоматизированные, наделенные искусственным интеллектом машины – дорогостоящее удовольствие. К примеру, компания MOTOMAN сдает свои высокоинтеллектуальные манипуляторы в аренду на месяц за 280 000 долларов.
Заключение:
Таким образом, мы видим, как стремительно роботы развиваются в промышленной сфере. Передовые технологии всё больше освобождают человека от выполнения сложной и рутинной работы. Внедрение робототехники на заводах способно экономить энергоресурсы, снизить уровень загрязнения окружающей среды, уменьшить затраты на рабочую силу и увеличить эффективность производственного процесса. Использование роботизированных технологий предоставляет предприятиям уникальную возможность осуществить эволюционный скачок и оторваться от конкурентов. Ведь окупаемость затрат на роботов уже доказана на практике. Так что, позаботьтесь о своем будущем и о будущем своей страны уже сейчас. Источник
fun-space.ru
Промышленные роботы
Промышленные сварочные роботы: разработка робототехнических комплексов, реализованные проекты
www.autowelding.ru — Сварочное оборудование — Промышленные роботы
Промышленный робот — манипулятор автоматического действия, оснащенный системой цифрового программного управления. В нем совмещаются большая гибкость исполнительных органов, обладающих обычной для манипуляторов высокой подвижностью, и легкость переналадки их двигательных функций. Роботы, предназначены для выполнения разнообразных работ при минимальном участии человека в акте управления. Они являются универсальными автоматами, в состав которых входят три основных функциональных узла: рабочие органы — «руки», вычислительная машина, управляющая ими, и устройства сбора информации о среде, сообщающие роботу способность адаптации к ней.
Промышленный робот обладает памятью, имеет специальную, систему обучения. Управление группой роботов может осуществляться от одной центральной электронной цифровой вычислительной машины. Американские фирмы «Unimate» и AMV в начале 60-х годов создали первые модели сложных программируемых роботов.
Роботы прошли испытания в промышленных условиях и, по расчетам зарубежных фирм, их ежегодный выпуск к концу 70-х годов составит тысячи единиц.
Открываются широкие возможности в применении оборудования, оснащенного цифровым программным управлением (ЦПУ), для решения задач автоматизации мелкосерийного и серийного» производства. Если на первых порах роботы заменяли человека на утомительных и опасных работах, то в дальнейшем сфера их применения охватила и также производственные операции, как покраска, сварка, подача исходных материалов и снятие готовой продукции.
Задачу автоматического перемещения и обработки деталей, при выполнении производственных процессов в машиностроении на первых порах решали с помощью механизмов, имеющих нередко сложные и оригинальные кинематические связи. Большие сложности при этом возникают при необходимости изменения операций цикла.
Второй этап развития автоматических устройств стал возможным после появления автоматических устройств, обладающих памятью и способных выполнять ряд сложных операций, быстро переналаживаться на другой цикл и не реагировать на изменение внешних условий.
Рабочий орган должен подобно руке человека перемещать, объект в заданную точку пространства и определенным образом, ориентировать этот объект; причем «рука» робота должна обладать достаточной маневренностью, грузоподъемностью, точностью позиционирования и скоростью. «Кисть» на конце руки, робота состоит из зажимных устройств, способных удерживать детали и узлы. В такой кисти могут быть один или два набора «пальцев» или же вакуумные (или магнитные) присоски (см. рис. 21, в).
К роботу можно подсоединять разные кисти для выполнения различных работ. При этом замена кистей может выполняться автоматически, без участия человека. Зажимные кисти фирмы «Andreiden Geselscbaft» (ФРГ) имеют три и пять пальцев. Кисть с тремя пальцами позволяет захватывать до 80% тех предметов, которые могут удерживаться рукой человека.
Роботам-манипуляторам в зависимости от их конструкции и назначения придается от двух до шести степеней свободы. Кроме того, в некоторых роботах, например, в роботах фирмы «Versatran», обеспечиваются дополнительные степени свободы за счет «перемещения вдоль направляющих салазок. Число степеней свободы рабочего органа и самого робота достигает восьми.
Рука робота может вращать кисть и перемещаться по вертикали и по горизонтали. Сама кисть может сжиматься или разжиматься, поворачиваться и наклоняться вперед и в стороны, как кисть человеческой руки.
Перемещение рабочего органа может быть прерывистым (от точки к точке) и плавным. У роботов с плавным перемещением рабочего органа последний, как правило, движется по контуру, определенному той задачей, которую выполняет робот. Робот с прерывистым движением рабочего органа предназначается в большинстве случаев для прямолинейного перемещения деталей от одной операции к другой. Погрешность установки рабочего органа для такого робота может не превышать нескольких сотых миллиметра.
В качестве привода исполнительных органов робота хорошо зарекомендовали себя электрогидравлические устройства, сочетающие такие качества, как большая выходная мощность при малой инерционности, надежность в работе и возможность электрического управления. В зависимости от типа памяти и исполнительных звеньев система управления может быть цифровой, аналоговой или смешанной. Роботы второго поколения, имеющие в системе управления мини-ЭВМ, оснащены «телеглазом».
Роботы повышенной сложности могут быть запрограммированы на повторяющийся останов рабочего органа в 200—3000 точках рабочей зоны, а не в 20—30 точках, как у простых роботов. Их сравнительно легко запрограммировать на работу в режиме «обучения». В этих роботах с регулированием по замкнутому контуру, а не по разомкнутому, как в простых роботах, выделены отдельные устройства управления для руки и кисти.
Чтобы соблюдать правильную траекторию движения руки три повторяющихся рабочих операциях, робот должен обладать памятью: на вращающемся магнитном барабане, на цилиндрических магнитных тонких пленках, как в роботах «Unimate», на потенциометрах, как в роботах «Versatran» фирмы «AMV», или на металлоокисных полупроводниках (МОП) сдвиговых регистрах, разработанной шведской фирмой «Relab».
Кроме того, используются полупроводниковые запоминающие устройства (ЗУ), связанные с мини-ЭВМ, как в работе фирмы Cavassaci Corporation (Япония) или «Sindstrand Corporation» (США).
К устройствам памяти необходимо отнести также простые конечные выключатели и механические упоры с предварительной установкой положения, используемые в большинстве недорогих роботов. В роботе «Unimate» функцию программирования выполняет транзисторный логический блок, считывающий информацию из ЗУ на цилиндрических магнитных пленках. В роботе «Versatran» и многих других последовательность выполняемых операций задается посредством переключения короткозамыкающих штырей и электронной коммутационной панели, от которой управляются логические схемы на реле.
Конкретный вариант системы управления определяется технико-экономическими показателями. На рис. 21 представлены основные (базовые) компоновочные схемы промышленных роботов.

Технический интерес представляет промышленный робот для манипулирования сварочными клещами (рис. 22). Он имеет запоминающее (программирующее) устройство для управления рабочими и вспомогательными движениями инструмента.
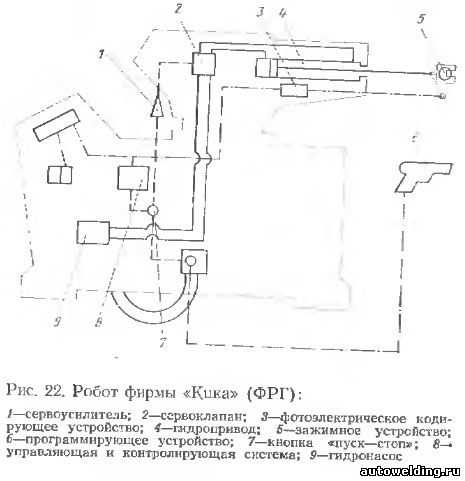
При составлении программы можно использовать обратную связь — после установки инструмента с помощью кнопок управления гидравлическим сервоприводом в требуемой точке его расположение кодируется и записывается на программу. Емкость накопителя позволяет запомнить несколько различных программ. Зона обслуживания робота 220° в горизонтальной плоскости, 57° в радиальной плоскости, 1050 мм в радиальном направлении. Масса инструмента до 11,3 кг; точность его установки ±1,2 мм; радиальная скорость 0,76 м/с; вертикальная скорость 1,27 м/с; скорость вращения инструмента и поворота консоли 110° в секунду.
Загрузочные устройства (роботы) с программным управлением выполняют разнообразные транспортные и технологические операции. Устройства с программным управлением «Versatran» представляют собой перемещающуюся по напольным или подвесным направляющим стойку, несущую горизонтальную механическую руку (рис. 21, а) с захватом.
В зависимости от исполнения цикл работы робота состоит из комбинации следующих движений: перемещение всего устройства по направляющим, вертикальное перемещение механической руки по стойке, горизонтальное прямолинейное перемещение захвата, поворот механической руки в горизонтальной плоскости, поворот захвата относительно механической руки, зажим-разжим захвата.
Управление — горизонтальное или контурное. Величина горизонтального перемещения руки — до 1000 мм, вертикального — до 750 мм; точность позиционирования +0,5 мм. Максимальный поворот механической руки 240°. Грузоподъемность — до 60 кг при длине механической руки 1100 мм.
Устройства применяют в производстве, где условия работы тяжелы, вредны и опасны для здоровья человека: при штамповке, ковке, точечной сварке, литье под давлением и т. д.
Некоторые устройства оборудованы запоминающими системами на магнитном барабане различной емкости, обеспечивающими запоминание от 128 до 1024 команд, записанных методом «самообслуживания».
Такой метод программирования применяет фирма «Unimate». Устройства этой фирмы (см. рис. 21, б) представляют собой смонтированную на корпусе механическую руку с гидравлическим приводом, действующую по программе по пяти координатным осям. Основные движения механической руки следующие: поворот относительно корпуса вокруг вертикальной оси, поворот относительно корпуса вокруг горизонтальной оси (наклон), горизонтальное прямолинейное перемещение захватов механической руки, поворот захватов вокруг вертикальной оси, разжим-зажим захватов.
Самые маленькие (по размерам) роботы серии 2000 имеют руку, которая может выступать от точки подвески почти на 2,5 м и перемещать нагрузку на шаг 0,12 мм. Такой гидромеханический робот имеет массу около 1400 кг, высоту 1,5 м и размеры основания 1,5х1,2 м.
Роботы все шире внедряются в сферу сварочного производства. Так, роботы фирмы «Unimate», оборудованные сварочными клещами, успешно используются в сварочных линиях на заводах многих фирм. По мнению представителей фирмы «General Motors», надежность сварки при использовании роботов так же высока, как при использовании любого другого автоматического» оборудования.
Большое внимание уделяется повышению точности сварочного оборудования и встройке в него систем управления процессом сварки. Японская фирма «Matusita», например, разработала экспериментальную замкнутую систему с запоминающим устройством на ленте для управления сваркой в среде углекислого газа. Система работает в следующем порядке: квалифицированный сварщик пускает машину и выполняет цикл сварочного процесса, а система управления использует импульсы для записи на ленту режимов сварки. После этого менее квалифицированный сварщик может работать на сварочной машине по программе, не ориентируясь на показания приборов, которые автоматически регулируют параметры процесса сварки.
Фирма «Waldtronik» (США) использует ЭВМ для управления работой большого числа сварочных постов в поточной линии. Регулируются режимы сварки и последовательность работы сварочных постов.
Робот A3 шведской фирмы «R. Каufielf» оснащен шаговым искателем, который может управлять 30 движениями. Кроме того, можно осуществить несколько независимых от него цикловых оперений. Грузоподъемность устройства 5 кг; точность позиционирования — 0,15 мм; горизонтальное передвижение руки 750, 1000 и 1200 мм, вертикальное 300 мм.
Поворотный фланец захватывающего устройства соединен с двумя сдвоенными цилиндрами, а также с девятиступенчатой системой упоров для управления конечными положениями. Само захватывающее устройство снабжено сменными губками, позволяющими производить захват изделий различных конфигураций.
Этой же фирмой выпущена серия упрощенных устройств грузоподъемностью до 65 кг (обычно работает с грузом до 15 кг) и точностью позиционирования ±0,05 мм. Устройство оснащено электрическими (а не электронными) и гидравлическими приборами управления, что облегчает его наладку, программирование и ремонт. Перемещение рабочего органа по горизонтали почти 1300 мм.
Коэффициент использования устройства во многом определяется принятой планировкой оборудования. Если устройство установлено стационарно, то оборудование целесообразно располагать вокруг устройства в зоне действия его исполнительного механизма. Большое значение при этом имеет число управляемых координат. Если устройство имеет возможность перемещения, то расположение оборудования не играет особой роли. Однако в обоих случаях группировка оборудования должна предусматривать последовательность операций и минимальное межоперационное транспортирование.
Эффективность устройств повышается благодаря их быстродействию.
Для рассматриваемых устройств характерно торможение исполнительного органа в конце хода и повышенная транспортная скорость на основном участке пути, с принудительной фиксацией изделия в захвате.
Выводы. 1. Автоматизация процесса сборки — основное направление совершенствования сборочно-сварочного производства.
Применение позиционеров и другого сборочно-сварочного технологического оборудования дает значительный эффект в результате сокращения времени на кантовку изделия. Кроме того, создается возможность выполнения почти любого сварочного» шва, в нижнем, удобном для сварки, положении. Сварочные вращатели и манипуляторы сообщают изделию вращение с заданной рабочей скоростью.
2. Наибольшую трудоемкость составляют элементы сборочных операций, связанные с подачей и взаимной ориентацией собираемых деталей. Эффективной мерой снижения трудоемкости сборочного процесса является создание узлов автоматической ориентации и подачи в зону сборки деталей.
3. Конструктивное исполнение сварочной технологической оснастки должно обеспечить сборку и сварку изделия, минуя операцию прихватки. Тем самым сокращается объем вспомогательных операций и повышается качество изготовленных изделий.
4. При создании манипуляторов в первую очередь следует учитывать возможность их переналаживания в пределах групп изделий, обладающих технологической общностью. С этой целью надо использовать принцип агрегатирования на базе типовых унифицированных узлов.
5. Сварочные манипуляторы должны обеспечивать удобство загрузки и выгрузки готовых изделий с применением средств межоперационного транспорта.
6. Сборочно-сварочная технологическая оснастка должна быть оборудована приточно-вытяжной вентиляцией (преимущественно встроенной в оснастку).
7. Для обеспечения плавности работы подъемно-поворотных механизмов следует использовать в качестве рабочего органа гидроприводы.
8. Применение промышленных роботов для автоматизации и механизации сварочных технологических процессов исключает проектирование и изготовление специальных манипуляторов, загрузочных и транспортных устройств. Роботы для сварки (особенно дуговой) необходимо оснащать специальными датчиками и системами, позволяющими корректировать программу путем слежения по стыку, контролировать качество шва и автоматически регулировать режим сварки.
Опыт показывает, что целесообразно совмещать управление движением электрода и режимом сварки в едином программирующем устройстве. Внедрение же роботов третьего поколения, оборудованных ЭВМ с телевизионным устройством, самостоятельно решающих возникающие в процессе работы задачи, повысит коэффициент автоматизации производственного процесса.
Читать:
www.autowelding.ru
Производители промышленных роботов
Производители промышленных роботов — Промышленные роботы
Российские производители промышленных роботов
БИТ Робитикс (ООО «БИТ Роботикс»), Россия
Производитель манипулятора типа «дельта робот». Компания также использует его в своих проектах автоматизации. На ноябрь 2017 года — единственный в России разработчик и производитель роботов такого класса и производительности.
Скорость робота — до 5 м/c, обычное ускорение — до 50 м/c2, максимальное ускорение — до 150 м/c2 (15g или в 1.5 раза больше, чем испытывает космонавт при баллистическом спуске). Эти роботы находят применение в области пищевых производств, фармацевтики и, в целом, производства товаров массового спроса.
ВМЗ (ООО «ВМЗ», Волжский Машиностроительный завод), Россия
Разработчик и производитель промышленных роботов. Предприятие действовало с 2011 года. На 2016 год — в стадии ликвидации данного направления. Закрытие на ВАЗ связывают с отсутствием заказов на роботов.
НПО НИИИП-НЗиК (Коминтерн), Новосибирск, Россия
промышленные роботы для оснащения литьевых машин
Рекорд Инжиниринг (ООО «Рекорд-Инжиниринг), Россия, Екатеринбург
Проектирование и производство промышленных роботов-манипуляторов, производство аналогов импортных промышленных роботов манипуляторов. Есть продажи.
http://www.rekord-eng.com/avtomatizaciya/promyshlennye_roboty/
Торговый дом «АРКОДИМ», Россия, Казань
Разработчик и производитель 3-7 осевых промышленных роботов ARKODIM консольного типа, линейной архитектуры. В 2016 году есть ряд продаж и внедрений в коммерческую практику.
Зарубежные производители промышленных роботов
Крупнейшие и наиболее заметные на рынке
Yaskawa Motoman Robotics, Япония
KUKA Robotics Corporation, Китай (первоначально — Германия)
FANUC Ltd., Япония
Denso Corp.
Universal Robots, Дания
Nachi Robotic Systems Inc.
ABB Robotics, Швеция/Швейцария
Публичная компания, специализирующаяся в области промышленных роботов и манипуляторов. Штаб-квартира в Цюрихе, Швейцария. Ведущий производитель промышленных роботов, модульных производственных систем и оказания услуг. Компания обращает особое внимание на производительность решений, качество продуктов и безопасность работников.
Alfarobot (Alfa Auto Machnery), Тайвань
Роботы, используемых в машинах для литья под давлением. http://www.alfarobot.com/
E-Deodor (Ningbo Techmation), Китай
Компания начала работать в сентябре 2015 года. Она выпускает в Фошане промышленных роботов, которые примерно на 20-30% дешевле, чем продукция других известных компаний. В 2016 году компания планирует произвести 350 промышленных роботов для использования на фабриках по производству изделий из пластика. Цена эти роботов — от $14 до $18 тысяч. К 2018 году мощность фабрики достигнет 3000 роботов в год. / next.ft.com
Electroimpact, США (гигантские AFP-автоматы для 3D-печати из композитных материалов)
2016.02.07 Мощные и быстрые роботы готовы изготавливать крылья для Boeing 777 из композитных материалов
Fanuc, Япония
Разработчик-производитель промышленных роботов различного типа. Один из мировых лидеров в этой области.
Fetch Robotics
Разработчик автономных роботов Fetch & Freight, предназначенных для использования на складах и в центрах выдачи заказов.
Foxconn
2016.10 На предприятиях Foxconn Group установлено уже 40 тысяч промышленных роботов FoxBot. Ежегодно выпускается около 10 000 роботов. Большую часть компонентов для них (кроме приводов и редукторов), Foxconn выпускает самостоятельно, включая контроллеры и ПО. Не исключено, что Foxconn будет разрабатывать и другие роботы, например, медицинские.
Honyen (Honyen Automation Equipment Co., Ltd.), Китай, Шанхай
Производитель промышленных роботов с мощностью производства до 1000 штук в месяц. Производит роботов для сварки, резки, гибки, упаковки, сборки, сортировки, лазерной сварки и других.
Сварочные: HY1006A-144; HY1006A-163; HY1006A-180; HY1006A-200; HY1010A-144; HY1010A-168; HY1010A-180;
Для плазменной резки: HY1010A-144; HY1010A-168; HY1010A-180;
Для лазерной резки: HY1010A-144; HY1010A-168; HY1010A-180;
Манипуляторы: HY1001A-038A; HY1001A-050A; HY1004A-063A; HY1008A-071A; HY1008A-090A; HY1005A-85; HY1003A-98; HY1010B-140; HY1020B-180; HY1010A-143; HY1020A-164; HY1010A-180; HY1050A-200; HY1165B-315
SCARA: HY1001C-040A; HY1002C-060A
Kawasaki, Япония
Разработчик-производитель промышленных роботов, число моделей которых измеряется десятками.
KUKA Robotics, Германия
Разработчик-производитель промышленных и коллаборативных роботов. Системный интегратор. Одна из 4 крупнейших в мире компаний в области промышленных роботов на 2015 год. В июне 2016 года китайская Midea официально заявила о предложении купить 30% акций компании. что в совокупности с уже имеющимся пакетом акций, обеспечит Midea позицией основного акционера. Voith Group в июле 2016 заявила о готовности продать 25% акций компании.
OTK Daihen, Япония
Panasonic, Япония
Rethink Robotics, США
Разработчик и производитель коллаборативных промышленных роботов. Известные модели — Baxter первого и второго поколений.
Sepro Group, Франция
Крупнейший производитель промышленной робототехники во Франции — Sepro Group. В мае 2017 года компания объявила о решении расширять бизнес во Франции и США. Планируемые инвестиции — $11 млн евро. Вырастет площадь головного предприятия в Ла-Рош-сюр-Йон, Франция до 20 тыс. кв. м, неподалеку откроется учебный центр. Запуск в эксплуатацию планируется к лету 2018 года. В США будет расширено предприятие в Уоррендейле, сборка роботов здесь начнется в 4q2017. Объем продаж роботов компанией растет вот уже четыре последних года — с 1.3 тыс в 2012 году до более 2.7 тыс в 2017 году. Сайт компании: http://www.sepro-group.com/products_archive/
Universal Robots, Дания
Промышленные роботы, collaborative тип. Основана в 2005 году. Основной конкурент Rethink Robotics, США. Принадлежит концерну Teradyne
Wittmann
Промышленные роботы линейного типа.
В 2017 году было продано 50 тыс. штук роботов. Компании пришлось расширять производственные мощности предприятий по производству роботов в Мошонмадьяроваре, Венгрия, и на головном предприятии в Вене, Австрия. Идет расширение производства на заводах в Нюрнберге, Германия и Писеке, Чешская Республика.
Yaskawa Electric Corporation, Япония
Один из крупнейших в мире производителей промышленных роботов. Линейка — Motoman.
Yamaha Robotics, США
Разработчик и производитель промышленных роботов, а также компонентов для их производства.
Синьсун, Китай
Раположен в Шэньяне, провинция Ляонин. Разрабатывает и производит промышленных роботов с 1993 года. В 2001 году объем продажи роботов компанией составлял 100 млн юаней. В 2011 году на долю компании приходилось до трети китайского рынка роботов. В том числе выпускает мобильные промышленные роботы, которые пользуются спросом не только в Китае, но и, например, в США и Канаде.
2016.02.22 В серийное производство запущен робот комбинированного типа (промышленный робот-манипулятор, способный к передвижению). Был показан в ноябре 2015 года на Всемирной конференции по робототехнике. С тех пор продано уже свыше 40 таких роботов общей стоимостью 50 млн юаней ($7.6 млн), т.е. каждый робот стоит около $200 тысяч. Точность позиционирования составляет 1-5 мм при различных операциях.
Поставщики и системные интеграторы промышленных роботов в России
+ +
robotrends.ru
KUKA, ABB robotics промышленные роботы на производстве, 6-ти осевые роботы
Применение промышленных роботов в современном промышленном производстве многообразно и широко. Обращаясь к нам вы обращаетесь к коллективу специалистов, системному интегратору, работа которого это внедрение в технологические процессы робототехнических комплексов, построенных на базе шести-осевых промышленных роботов производства фирм KUKA и ABB.C 2000 года мы глубоко специализируемся на применении проверенных и популярных моделей промышленных роботов производства фирм KUKA (Германия) и ABB (Швеция) преимущественно в технологиях автоматизированной сварки металлов и 3Д механической обработке осевым инструментом (роботы для фрезеровки).
На интернет- сайте так же представлен каталог стандартных моделей с указанием основных технических характеристик для различных типоразмеров промышленных роботов от европейских и японских производителей — «ABB Robots», «Kuka Roboter GmbH», «Kawasaki Robotics», «Fanuc Robotics», «Motoman Yaskawa Robots», публикуются новости и актуальные статьи мира российской и зарубежной робототехники. При сотрудничестве с компанией РОБОТОТЕХНИКА заказчик получает оптимальные технические решения по разумной стоимости, что является залогом экономической целесообразности проектов. В своих проектах мы применяем промышленных роботов ранее бывших в употреблении, после проведенной предпродажной подготовки с последующим предоставлением годовой гарантии безотказной работоспособности поставленного оборудования.
«РОБОТОТЕХНИКА» (Россия) располагает складскими и производственными площадями, имеет налаженные связи с производителями, не только продает промышленных роботов, но и выполняет процесс интеграции «под ключ» с разработкой необходимой Вам технологии, оснастки, дополнительных приспособлений и устройств. Вместе с вами мы сможем решить любые задачи в области автоматизации технологических процессов на вашем предприятии.
Важным условием работы компании является непосредственное наличие большого количества номенклатурного ассортимента на складе в России, что позволяет обеспечивать оптимальные сроки реализации проекта в целом. Для проведения обучения и повышения уровня квалификации сотрудников заказчика в демонстрационном зале компании представлены действующие образцы промышленных роботов ведущих европейских производителей KUKA (Германия) и ABB (Швеция), как самых современных, так и прошлого покаления, имеющего как следствие более короткий срок окупаемости. Просим обращаться.
rus-robot.com