Принципы работы и виды сервоприводов
Отличительной особенностью сервопривода является возможность управления через отрицательную обратную связь с использованием заданных параметров. Все оборудование данного типа можно разделить на две группы – сервоприводы постоянного тока и трехфазные сервоприводы переменного тока.
Устройство сервоприводов постоянного тока
Как правило, сервоприводы постоянного тока используются в маломощных устройствах позиционирования. Классическая область их применения – робототехника.
Конструкция современных сервоприводов довольно проста, но при этом весьма эффективна, так как позволяет обеспечить максимально точное управление движением. Сервопривод состоит из:
- двигателя постоянного тока
- шестерни редуктора
- выходного вала
- потенциометра
- платы управления, на которую подается управляющий сигнал
Двигатель и редуктор образуют привод. Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Для того, чтобы угол поворота превратить в электрический сигнал, необходим датчик. Его функции в сервоприводе постоянного тока с успехом выполняет потенциометр. Он выдает аналоговый сигнал (как правило, от 0 до 10 В) с дискретностью, ограниченной АЦП (аналогово-цифровым преобразователем), на который поступает этот сигнал.
Самой важной деталью сервопривода, пожалуй, является электронная плата сервоусилителя, которая принимает и анализирует управляющие импульсы, соотносит их с данными потенциометра, отвечает за запуск и выключение двигателя.
Принцип работы
Принцип действия устройств основан на использовании импульсного сигнала, который имеет три важные характеристики – частоту повторения, минимальную и максимальную продолжительность.
Импульсные сигналы, получаемые сервоприводом, имеют стандартную частоту, а вот их продолжительность в зависимости от модели может составлять от 0,8 до 2,2 мс. Параллельно с поступлением управляющего импульса активируется работа генератора опорного импульса, который связан с потенциометром. Тот, в свою очередь, механически сопряжен с выходным валом и отвечает за корректирование его положения.
Электронная схема анализирует импульсы с учетом длительности и на основе разностной величины определяет разницу между ожидаемым (заданным) положением вала и реальным (измеренным при помощи потенциометра). Затем производится корректировка путем подачи напряжения на питание двигателя.
Основные положения устройства
Если продолжительность опорного и управляющего импульсов совпадает, наступает так называемый нулевой момент. В это время двигатель сервопривода не работает, вал привода находится в исходном (неподвижном) положении.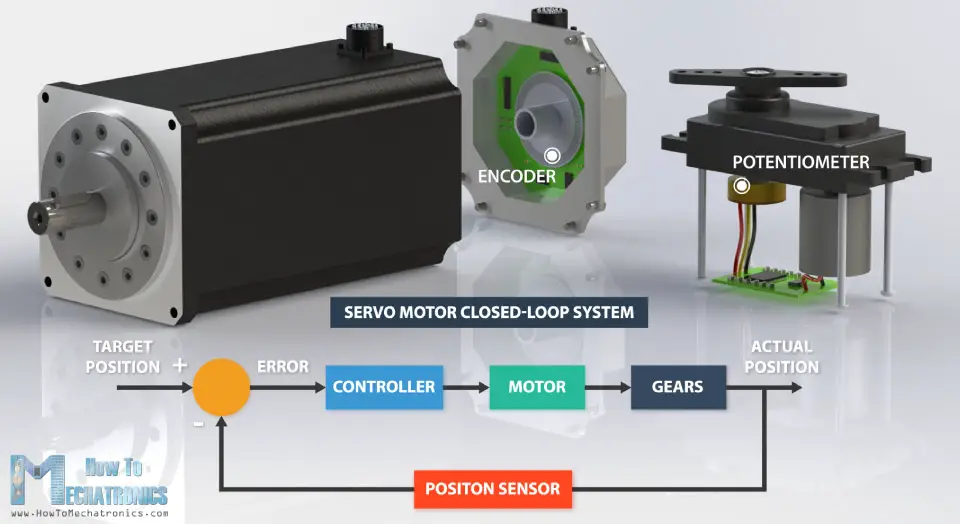
При увеличении длительности управляющего импульса плата фиксирует разбежку показателей, двигатель получает напряжение и приходит в движение. В свою очередь, редуктор начинает воздействовать на выходной вал, который поворачивается таким образом, чтобы достигнуть увеличения продолжительности опорного импульса. Как только он сравняется с управляющим импульсом, двигатель прекратит свою работу.
При уменьшении длительности управляющего импульса происходит все то же самое, только с точностью до наоборот, так как двигатель начинает вращаться в обратную сторону. Как только импульсы сравнялись, двигатель останавливается.
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Режимы управления
Существуют три основных режима работы сервопривода переменного тока.
Режим управления положением. Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Комбинация импульсов для управления положением может передавать информацию не только по положению, но также по скорости и направлению вращения двигателя. Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Как правило, во всех сервоусилителях входы управления именуются как PULSE, SIGN.
Режим управления скоростью. В данном случае управление производится аналоговым сигналом. Значения скорости также могут переключаться на фиксированные величины подачей сигналов на соответствующие дискретные входы. В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
Режим управления скоростью схож с работой асинхронного двигателя, управляемого преобразователем частоты. Задаются такие параметры, как время разгона и замедления, максимальная и минимальная скорости и другие.
Режим управления моментом.
В этом режиме двигатель может вращаться либо стоять на месте, но при этом момент на валу будет заданным. Управление может производиться дискретным либо аналоговым двухполярным сигналом. Этот режим может использоваться для машин, где необходимо менять усилие прижима, давление и т. п.
Оценка текущего момента двигателя, необходимого для управления, производится за счет встроенного датчика тока.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Сервопривод или шаговый двигатель?
Принципы программирования ПЛК
Принцип работы серводвигателя | Статьи Первый ампер
Сервопривод – это механизм со специальным датчиком для отслеживания заданных параметров, блоком управления и двигателем. Этот механизм предназначен для установки в различное станочное оборудование, а также применения в процессах автоматизации производства. Сервоприводы также активно используются в системах отопления, кондиционирования. В целом они востребованы везде, где нужно задавать движение, а также обеспечивать регулировку ускорения или замедления.
В целом они востребованы везде, где нужно задавать движение, а также обеспечивать регулировку ускорения или замедления.
Что такое сервопривод, для чего и где используется.
Сервопривод – это механизм, который подлежит размещению под требуемым углом для фиксации в нужном положении. Он представляет собой силовой агрегат, который управляется посредством отрицательной обратной связи. За счет этого обеспечивается чуткий контроль заданных параметров движения. Сервоприводы также в обязательном порядке оснащаются датчиками и блоком контроля для автоматической поддержки требуемых условий.
Учитывая то, что сервопривод отвечает за главные функции механизма, в случае его выхода из строя, необходим оперативный ремонт серводвигателей. Поэтому его эксплуатацию важно доверять исключительно опытным мастерам. Обслуживание сервоприводов предусматривает замену энкодеров и резольверов, изношенных подшипников и т.д. Однако перед тем, как выполнить ремонт сервомоторов, важно также позаботиться о профессиональной диагностике. При этом стоит исключить попытки самостоятельного определения для последующего устранения проблемы. Они могут привести только к повторной поломке и полному выходу из строя сервомотора.
При этом стоит исключить попытки самостоятельного определения для последующего устранения проблемы. Они могут привести только к повторной поломке и полному выходу из строя сервомотора.
Если посмотреть на сферы применения, то чаще всего сервоприводы используются в робототехнике и в процессе создания манипуляторов. Они также необходимы для работы систем «теплого пола». Применение сервомоторов обеспечивает возможность автоматической регулировки температуры путем ее понижения или повышения.
Серводвигатели также нашли свое применение в автомобилестроении. Они интегрируются с замками. К тому же их используются для переключения скоростей в автоматической КПП и переключения режимов климата.
Без сервоприводов нельзя обойтись и в грузовом оборудовании. Эти механизмы предназначены для подбора подходящего режима работы. Они необходимы для того, чтобы захватить, поднять, транспортировать, опустить или отпустить предмет любого размера и веса.
Следует заметить, что сервоприводы могут использоваться и во многих других отраслях. Они будут востребованы везде, где нужен точный контроль движения вала.
Они будут востребованы везде, где нужен точный контроль движения вала.
Принцип действия и конструкция устройства
Работа сервомоторов основывается на командах управления, которые содержатся в специальной программе. Например, в станках ЧПУ управление осуществляется при помощи стойки числового программного управления. При получении команды создается определенное напряжение, передающееся для питания привода. В результате этого действия в сервомоторе начинает вращаться ходовой винт, с которым связан датчик и исполнительный орган станочного оборудования.
Программное обеспечение предусматривает, что определенное количество сигналов с датчика соответствует конкретному расстоянию, которое прошел исполняющий механизм. Следовательно, при получении требуемого количества импульсов выдается нулевое значение выходного напряжения. После этого происходит остановка серводвигателя.
Конструкция сервомотора предусматривает наличие:
· ротора;
· статора;
· комплектующих для коммутации;
· энкодера;
· узла управления и контроля;
· системы включения и выключения;
· корпуса.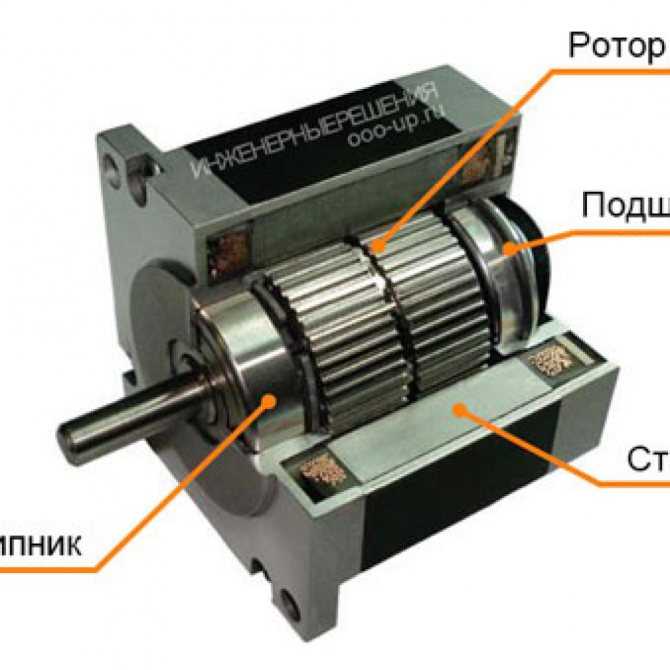
Главной конструктивной особенностью сервомоторов считается возможность управления этими силовыми агрегатами посредством изменения скорости вращения ротора, момента и положения. Еще одна особенность заключается в наличии обратной связи.
Для включения и выключения такого мотора используются резисторы, потенциометры и микропроцессоры. Основу работы серводвигателей составляет принцип сравнения заданного значения и показателей датчиков.
Основные характеристики.
При выборе сервомоторов стоит обратить внимание на такие характеристики как:
· Усиление на валу. От этого показателя зависит крутящий момент. Поэтому он является определяющей характеристикой. В паспорте сервомотора часто указывается сразу несколько показателей для разных значений напряжения.
· Скорость поворота. Данный параметр также влияет на работу сервопривода. Скорость поворота указывается в параметре времени.
· Тип устройства. Существует 2 варианта – цифровой и аналоговый. Для управления первым вариантом используются кодовые команды, последовательная передача которых выполняется через интерфейс. Для управления аналоговыми устройствами подаются частоты с определенным параметрами.
Для управления первым вариантом используются кодовые команды, последовательная передача которых выполняется через интерфейс. Для управления аналоговыми устройствами подаются частоты с определенным параметрами.
· Питание. Чаще всего данный показатель находится в пределах с 4,8 до 7,2 В.
· Угол поворота. Данный параметр может быть равен 180 или 360 градусам.
Как осуществляется управление серводвигателем, Сервомоторы работают по следующему алгоритму:
· Получение входящих управляющих импульсов со значением угла поворота или скорости и направления вращения.
· Сравнение полученного значения с показателями на датчике.
· Действие электропривода, соответствующее полученной команде. Это может быть поворот, замедление, ускорение и т.д.
Чтобы задать сервомотору требуемое действие, нужно послать управляющий сигнал. Определение положения, которое должен занять сервопривод, зависит от длины импульсов. Полученный импульс сравнивается с значениями заложенных команд. Например, если длина двух импульсов разная, то происходит включение электромотора. Если же длины импульсов одинаковые, то происходит его остановка.
Например, если длина двух импульсов разная, то происходит включение электромотора. Если же длины импульсов одинаковые, то происходит его остановка.
Где и для чего применяется?
Чаще всего сервомоторы используются в точных приборах, программируемых станках, робототехнике и т.д. Данные механизмы нашли свою популярность в авиамоделировании.
Сегодня происходит развитие и изменение сервоприводов. В сервомоторах, которые сегодня выпускаются на рынке увеличилось количество обмоток. Также произошло увеличение скорости разгона и вращения. Теперь обмотки размещаются даже снаружи магнита. За счет этого решения повышается КПД устройств.
Современные технологии также позволили отказаться от коллектора и использовать постоянные магниты ротора. Сегодня самыми востребованными на рынке можно назвать серводвигатели, функционирующие от программируемого контроллера. Применение таких устройств позволяет создать высокоточные приборы и современную технику.
Такой фактор как высокая точность, поспособствовал развитию и востребованности сервомоторов. К тому же современные цифровые разработки используют компьютер как для настройки, так и управления этими устройствами. За счет этого обеспечивается упрощение работы.
К тому же современные цифровые разработки используют компьютер как для настройки, так и управления этими устройствами. За счет этого обеспечивается упрощение работы.
Остается добавить, что серводвигатели необходимы для перемещения выходного вала в требуемое положение и его автоматического удержания. К тому же с их помощью задаются движения механизма, которые координируются вращениями вала.
Как работают серводвигатели | Kollmorgen
Как работает серводвигатель? Серводвигатель — это электромеханическое устройство, которое создает крутящий момент и скорость в зависимости от подаваемого тока и напряжения. Серводвигатель работает как часть системы с замкнутым контуром, обеспечивая крутящий момент и скорость по команде от сервоконтроллера, использующего устройство обратной связи для замыкания контура. Устройство обратной связи передает такую информацию, как ток, скорость или положение, на сервоконтроллер, который регулирует действие двигателя в зависимости от заданных параметров.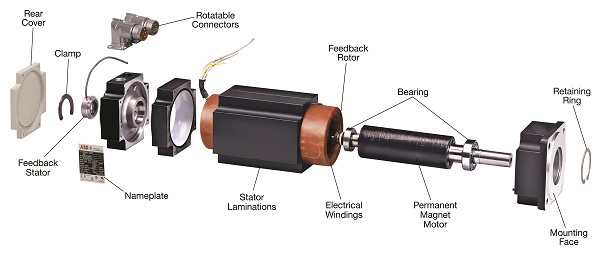
Доступны серводвигатели самых разных типов, форм и размеров. Термин сервопривод был впервые использован в 1859 году Джозефом Факортом, который реализовал механизм обратной связи, помогающий управлять кораблем с помощью пара для управления рулями. Серводвигатель является частью сервомеханизма, состоящего из трех основных элементов: двигателя, устройства обратной связи и управляющей электроники. Двигатель может быть переменного или постоянного тока, щеточный или бесщеточный, вращающийся или линейный, любого размера. Устройством обратной связи может быть потенциометр, устройство на эффекте Холла, тахометр, резольвер, энкодер, линейный преобразователь или любой другой соответствующий датчик. Завершает сервосистему управляющая электроника, которая питает двигатель и сравнивает данные обратной связи и ссылку на команду, чтобы убедиться, что серводвигатель работает в соответствии с командой. Существует множество типов применения серводвигателей, от простых двигателей постоянного тока, используемых в любительских приложениях (например, в моделях самолетов), до сложных бесщеточных двигателей, приводимых в действие сложными контроллерами движения, которые используются в многоосевых обрабатывающих центрах. Одним из примеров распространенного сервомеханизма является круиз-контроль транспортного средства, который состоит из двигателя (двигателя), датчика скорости (обратной связи) и электроники для сравнения скорости транспортного средства с заданной скоростью. Если транспортное средство замедляется, датчик передает эти данные в электронику, которая, в свою очередь, увеличивает подачу газа в двигатель, чтобы увеличить скорость до желаемого заданного значения — простая система с замкнутым контуром.
Одним из примеров распространенного сервомеханизма является круиз-контроль транспортного средства, который состоит из двигателя (двигателя), датчика скорости (обратной связи) и электроники для сравнения скорости транспортного средства с заданной скоростью. Если транспортное средство замедляется, датчик передает эти данные в электронику, которая, в свою очередь, увеличивает подачу газа в двигатель, чтобы увеличить скорость до желаемого заданного значения — простая система с замкнутым контуром.
Простой промышленный серводвигатель состоит из двигателя постоянного тока с постоянными магнитами и встроенным тахометром, который обеспечивает выходное напряжение, пропорциональное скорости. Электроника привода подает на двигатель необходимое напряжение и ток на основе напряжения, поступающего от тахометра. В этом примере заданная скорость (представленная как опорное напряжение команды) устанавливается в драйвере, затем схема драйвера сравнивает напряжение обратной связи тахометра и определяет, была ли достигнута желаемая скорость, что известно как замкнутый контур скорости. Контур скорости отслеживает заданную скорость и обратную связь от тахометра, в то время как водитель регулирует мощность двигателя для поддержания желаемой заданной скорости.
Контур скорости отслеживает заданную скорость и обратную связь от тахометра, в то время как водитель регулирует мощность двигателя для поддержания желаемой заданной скорости.
В более сложной сервосистеме несколько встроенных контуров настроены на оптимальную производительность, чтобы обеспечить точное управление движением. Система состоит из контуров тока, скорости и положения, в которых используются прецизионные элементы обратной связи. Каждый контур сигнализирует следующему контуру и отслеживает соответствующие элементы обратной связи, чтобы в реальном времени вносить коррективы для соответствия заданным параметрам.
Базовая петля представляет собой петлю тока или крутящего момента. Ток пропорционален крутящему моменту во вращающемся двигателе (или силе в линейном двигателе), который обеспечивает ускорение или тягу. Датчик тока — это устройство, которое обеспечивает обратную связь, связанную с током, протекающим через двигатель. Датчик отправляет сигнал обратно в управляющую электронику — обычно аналоговый или цифровой сигнал, пропорциональный току двигателя. Этот сигнал вычитается из заданного сигнала. Когда серводвигатель находится на заданном токе, петля будет удовлетворяться до тех пор, пока ток не упадет ниже заданного тока. Затем контур будет увеличивать ток до тех пор, пока не будет достигнут заданный ток, при этом цикл будет продолжаться с частотой обновления менее секунды.
Этот сигнал вычитается из заданного сигнала. Когда серводвигатель находится на заданном токе, петля будет удовлетворяться до тех пор, пока ток не упадет ниже заданного тока. Затем контур будет увеличивать ток до тех пор, пока не будет достигнут заданный ток, при этом цикл будет продолжаться с частотой обновления менее секунды.
Контур скорости работает таким же образом с напряжением, пропорциональным скорости. Контур скорости посылает контуру тока команду увеличить ток (тем самым увеличивая напряжение), когда скорость падает ниже заданной скорости.
Контур положения принимает команду для ПЛК или контроллера движения, который, в свою очередь, обеспечивает команду скорости, которая подается на контур скорости, который, в свою очередь, управляет требуемым током для ускорения, поддержания и замедления двигателя для перемещения в заданное положение. командное положение. Все три контура работают оптимизированно синхронно, обеспечивая плавное и точное управление сервомеханизмом.
Основы серводвигателя, принцип работы и теория
Что такое серводвигатель? Серводвигатель — это тип двигателя, который может вращаться с большой точностью. Обычно этот тип двигателя состоит из схемы управления, которая обеспечивает обратную связь о текущем положении вала двигателя, эта обратная связь позволяет серводвигателям вращаться с большой точностью. Если вы хотите повернуть объект на определенный угол или расстояние, то вы используете серводвигатель. Он просто состоит из простого двигателя, который работает через сервомеханизм . Если двигатель питается от источника постоянного тока, то он называется серводвигателем постоянного тока, а если это двигатель с питанием от переменного тока, то он называется серводвигателем переменного тока. В этом уроке мы будем обсуждать только серводвигатель постоянного тока , работающий с кодом . Помимо этих основных классификаций, существует множество других типов серводвигателей, основанных на типе зубчатой передачи и рабочих характеристиках.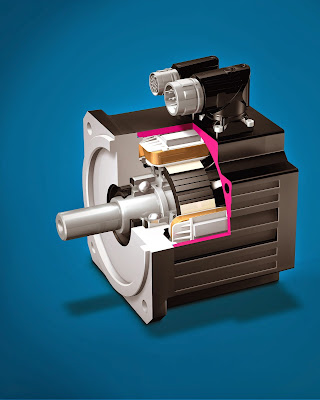 Серводвигатель обычно поставляется с редукторным механизмом, который позволяет нам получить серводвигатель с очень высоким крутящим моментом в небольших и легких корпусах. Благодаря этим характеристикам они используются во многих приложениях, таких как игрушечные автомобили, радиоуправляемые вертолеты и самолеты, робототехника и т. д.
Серводвигатель обычно поставляется с редукторным механизмом, который позволяет нам получить серводвигатель с очень высоким крутящим моментом в небольших и легких корпусах. Благодаря этим характеристикам они используются во многих приложениях, таких как игрушечные автомобили, радиоуправляемые вертолеты и самолеты, робототехника и т. д.
Серводвигатели рассчитаны на кг/см (килограмм на сантиметр), большинство серводвигателей для хобби рассчитаны на 3 кг/см, 6 кг/см или 12 кг/см. Этот кг/см показывает, какой вес ваш серводвигатель может поднять на определенное расстояние. Например: Серводвигатель 6 кг/см должен быть в состоянии поднять 6 кг, если груз подвешен на расстоянии 1 см от вала двигателя, чем больше расстояние, тем меньше грузоподъемность. Положение серводвигателя определяется электрическим импульсом, а его схема размещается рядом с двигателем.
Рабочий механизм серводвигателя
Состоит из трех частей:
- Управляемое устройство
- Выходной датчик
- Система обратной связи
Это замкнутая система, в которой используется система положительной обратной связи для управления движением и конечным положением вала. Здесь устройство управляется сигналом обратной связи, генерируемым путем сравнения выходного сигнала и эталонного входного сигнала.
Здесь устройство управляется сигналом обратной связи, генерируемым путем сравнения выходного сигнала и эталонного входного сигнала.
Здесь опорный входной сигнал сравнивается с опорным выходным сигналом, и третий сигнал вырабатывается системой обратной связи. И этот третий сигнал действует как входной сигнал для управления устройством. Этот сигнал присутствует до тех пор, пока генерируется сигнал обратной связи или существует разница между опорным входным сигналом и опорным выходным сигналом. Таким образом, основной задачей сервомеханизма является поддержание выходной мощности системы на желаемом уровне при наличии шумов.
Принцип работы серводвигателя
Серводвигатель состоит из двигателя (постоянного или переменного тока), потенциометра, редуктора и схемы управления. Прежде всего, мы используем редуктор для снижения оборотов и увеличения крутящего момента двигателя. Скажем, в исходном положении вала серводвигателя положение ручки потенциометра таково, что на выходном порту потенциометра не генерируется электрический сигнал.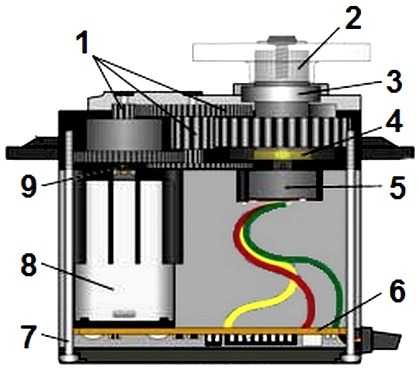 Теперь на другой вход усилителя детектора ошибок подается электрический сигнал. Теперь разница между этими двумя сигналами, один из которых поступает от потенциометра, а другой поступает из других источников, будет обрабатываться в механизме обратной связи, и на выходе будет обеспечен сигнал ошибки. Этот сигнал ошибки действует как вход для двигателя, и двигатель начинает вращаться. Теперь вал двигателя соединен с потенциометром, и когда двигатель вращается, потенциометр и он будут генерировать сигнал. Таким образом, при изменении углового положения потенциометра изменяется его выходной сигнал обратной связи. Через некоторое время положение потенциометра достигает положения, при котором выход потенциометра совпадает с внешним сигналом. В этом состоянии не будет выходного сигнала от усилителя на вход двигателя, так как нет разницы между внешним приложенным сигналом и сигналом, генерируемым на потенциометре, и в этой ситуации двигатель перестанет вращаться.
Теперь на другой вход усилителя детектора ошибок подается электрический сигнал. Теперь разница между этими двумя сигналами, один из которых поступает от потенциометра, а другой поступает из других источников, будет обрабатываться в механизме обратной связи, и на выходе будет обеспечен сигнал ошибки. Этот сигнал ошибки действует как вход для двигателя, и двигатель начинает вращаться. Теперь вал двигателя соединен с потенциометром, и когда двигатель вращается, потенциометр и он будут генерировать сигнал. Таким образом, при изменении углового положения потенциометра изменяется его выходной сигнал обратной связи. Через некоторое время положение потенциометра достигает положения, при котором выход потенциометра совпадает с внешним сигналом. В этом состоянии не будет выходного сигнала от усилителя на вход двигателя, так как нет разницы между внешним приложенным сигналом и сигналом, генерируемым на потенциометре, и в этой ситуации двигатель перестанет вращаться.
Взаимодействие серводвигателей с микроконтроллерами:
Сопряжение серводвигателей для хобби, таких как серводвигатель s90, с микроконтроллером очень просто. Из сервоприводов выходит три провода . Из которых два будут использоваться для питания (положительный и отрицательный), а один будет использоваться для сигнала, который должен быть отправлен с MCU. Серводвигатель Metal Gear MG995 , который чаще всего используется для роботов-гуманоидов с радиоуправлением и т. д. Изображение MG995 показано ниже:
Из сервоприводов выходит три провода . Из которых два будут использоваться для питания (положительный и отрицательный), а один будет использоваться для сигнала, который должен быть отправлен с MCU. Серводвигатель Metal Gear MG995 , который чаще всего используется для роботов-гуманоидов с радиоуправлением и т. д. Изображение MG995 показано ниже:
Цветовая маркировка вашего серводвигателя может отличаться, поэтому сверьтесь с соответствующей спецификацией.
Все серводвигатели работают напрямую с вашими шинами питания +5 В, но мы должны быть осторожны с величиной тока, который будет потреблять двигатель, если вы планируете использовать более двух серводвигателей, необходимо разработать соответствующий сервощит.
Управление серводвигателем:
Все двигатели имеют три провода, выходящие из них. Из которых два будут использоваться для питания (положительный и отрицательный), а один будет использоваться для сигнала, который должен быть отправлен от MCU.
Серводвигатель управляется с помощью ШИМ (импульсный с модуляцией), который обеспечивается управляющими проводами. Есть минимальный импульс, максимальный импульс и частота повторения. Серводвигатель может поворачиваться на 90 градусов в любом направлении из нейтрального положения. Серводвигатель ожидает появления импульса каждые 20 миллисекунд (мс), и длина импульса будет определять, насколько далеко повернется двигатель. Например, импульс 1,5 мс заставит двигатель повернуться в положение 90°, например, если импульс короче 1,5 мс, вал сдвинется на 0°, а если он длиннее 1,5 мс, сервопривод повернется на 180°.
Серводвигатель работает по принципу ШИМ (широтно-импульсная модуляция) , что означает, что его угол поворота контролируется длительностью импульса, подаваемого на его управляющий контакт. В основном серводвигатель состоит из двигателя постоянного тока , который управляется переменным резистором (потенциометром) и несколькими шестернями .
Серводвигатель может поворачиваться от 0 до 180 градусов, но может быть и до 210 градусов, в зависимости от производства. Этой степенью вращения можно управлять, подавая электрический импульс соответствующей ширины на его управляющий контакт. Сервопривод проверяет пульс каждые 20 миллисекунд. Импульс шириной 1 мс (1 миллисекунда) может повернуть сервопривод на 0 градусов, 1,5 мс может повернуть на 90 градусов (нейтральное положение), а импульс 2 мс может повернуть его на 180 градусов.
Все серводвигатели работают напрямую с вашими шинами питания +5 В, но мы должны быть осторожны с величиной тока, который будет потреблять двигатель, если вы планируете использовать более двух серводвигателей, необходимо разработать соответствующий сервощит.