принципиальное устройство и компоненты сервосистем
Сервопривод — самый передовой и современный вид двигателя. Он предназначен для использования в сферах управления движением, нуждающихся в высокой точности позиционирования. Знание того, как работает сервопривод, позволяет понять его растущую востребованность в автоматизации промышленных процессов и потребительской технике.
- Доцифровая эра
- Эволюция точности
- Устройство и типы
Доцифровая эра
Название Le-Servomoteur впервые использовалось Жозефом Фарко в 1868 году для описания гидравлических и паровых двигателей, применяемых в судостроении. Фактическое значение этого слова утрачено со временем, но можно предположить, что оно представляло собой каламбур из французского cerveau (мозг) и латинского servus (служить). В широком смысле этот термин был введён не для подчёркивания полезности или сложности моторов, а акцентировал внимание на их свойстве служить командам комплекса управления движителем. То есть привод имеет обратную связь с остальной системой и откликается на её сигналы.
То есть привод имеет обратную связь с остальной системой и откликается на её сигналы.
В 1898 году Тесла экспериментировал с беспроводным управлением моделями кораблей, оснащёнными контакторными серводвигателями, а в 1911 Хобарт уже поместил термин «серводвигатель» в свой словарь. К 1915 году это слово прочно закрепилось в среде англоязычных инженеров-электриков, несмотря на французское происхождение. Дальнейшее развитие технологии до Второй мировой войны происходило более чем стремительно:
- 1916 — запатентована пневматическая торпеда, в которой руль подчинялся сервомеханизму;
- 1922 — General Electric начала работы над сервомашинами для управления морскими орудиями;
- 1925 — создан электронный орудийный сервопривод, использующий пропорциональный контроль и положительную обратную связь;
- 1933 — представлен ленточный регистратор для записи диаграмм с сервомеханизмом постоянного тока.
- 1935 —испытан первый шаговый двигатель в качестве дистанционного повторителя положения компаса и прицела пушки.


Эволюция точности
Шаговые двигатели использовались во время Второй мировой войны и после её окончания в ограниченном количестве. В 60-х годах прошлого столетия они пережили несколько усовершенствований и были повсеместны более двух десятков лет в качестве незаменимых элементов беспилотного управления, индикаторов сортировки вагонов и станций взвешивания, цифровых дифференциальных высотомерах и компьютерной периферии.
Первые бесколлекторные двигатели были разработаны в середине 50-х годов. Устранение механических щёток позволяло им работать в течение удивительно долгого времени с высокой надёжностью. У шаговых моторов появился сильный конкурент. Бесколлекторные двигатели оказались незаменимы в освоении космоса, что и определило их бурное развитие.
Появление доступных способов производства редкоземельных кобальтовых магнитов в 1960-х стало главной базой для технологического рывка моторов постоянного тока. Именно они, оснащённые приводами с контролируемой обратной связью, составляют бо́льшую часть производимых в мире серводвигателей. Микропроцессоры ворвались на рынок автоматики в начале 1970-х и смогли обеспечить почти идеальный контроль над движением механизмов.
Именно они, оснащённые приводами с контролируемой обратной связью, составляют бо́льшую часть производимых в мире серводвигателей. Микропроцессоры ворвались на рынок автоматики в начале 1970-х и смогли обеспечить почти идеальный контроль над движением механизмов.
Устройство и типы
Сервоприводом называют устройство, предназначенное совершать механическое действие с высокой точностью под непрерывным самоконтролем целевой позиции и параметров движения. Наличие системы обратной связи с чувствительным устройством для исправления отклонений от заданных параметров отличает его от других типов приводов. В более широком смысле этим термином обозначают современные электродвигатели, оснащённые сервоприводами. Упрощённо устройство сервопривода можно описать как замкнутую систему из четырёх элементов:
- датчик;
- двигатель;
- контроллер;
- система обратной связи.

Принцип работы серводвигателя выглядит так: на вход устройства подаётся команда к назначению нового состояния (координат, скорости и т. п. ), прибор определяет текущее значение, сравнивает его с поступившим и производит управляющее воздействие на двигатель для уменьшения их разности.
Благодаря способностям поддерживать и контролировать заданные параметры, сервомеханизмы считаются наиболее передовыми приводами. Современные устройства сильно изменились в сравнении с первыми поколениями. Теперь это интеллектуальные приборы, выполненные с применением последних достижений в производстве магнитов и процессорной техники. В XXI веке прогресс позволил удешевить в несколько раз простые устройства без потери их качеств и создать технически сложные приводы переменной скорости и высокой точности для таких требовательных отраслей, как станкостроение.
В современной промышленности используют два типа серводвигателей: линейные и поворотные.
- больших скоростей и ускорений;
- высокой точности позиционирования.
Они обладают неоспоримыми преимуществами, но тем не менее популярны именно роторные сервоприводы. Это обусловлено главным образом тем, что линейные имеют склонность к перегреву. Тепло вызывает нежелательное расширение, создавая нагрузку на подшипники, смазку и датчики. С течением времени это негативно сказывается на продолжительности жизни компонентов.
Роторные двигатели делятся, в свою очередь, на сервоприводы позиционного и непрерывного вращения. Устройства позиционного вращения — самый распространённый тип. Выходной вал работает только в секторе круга, ограниченный физическими стопорами для предотвращения поворота за конструктивно заданные пределы.
Моторы непрерывного вращения очень похожи на позиционные с той разницей, что имеют возможность вращаться в любом направлении с разной скоростью в зависимости от входного сигнала.

Преимущества роторных серводвигателей, с точки зрения управления, выглядят так:
- крутящий момент пропорционален току;
- скорость пропорциональна приложенному напряжению.
И первые, и вторые востребованы в применении от детских игрушек до космической робототехники.
Сервоприводы, конечно же, продолжают совершенствоваться. Они появились и эволюционировали как результат тенденции к децентрализации автоматизированных систем. Удешевление процессоров ускоряет этот процесс. Количество функций, выполняемых современными сервоприводами, растёт и, судя по всему, будет продолжать расти. Новейшие устройства уже наделяются способностями к самонастройке и оптимизации параметров управления и могут изготавливаться с контроллерами процессов для удалённых установок.
Вполне возможно, сервоприводы будущего будут решать много смежных задач в машинах и механизмах, помогая избежать установки дополнительного оборудования.

Как устроен сервопривод и принцип его работы описаны в блоге Planeta Hobby
25 августа 2016
29533 заинтересовались
Статью подготовил
Алексей Безуглов
CEO, Основатель Planeta Hobby, маркетинг и продвижение
Третий компонент аппаратуры управления – сервомашинка. В данной статье мы постараемся объяснить вам, что это за компонент, каково его назначение, устройство и принцип работы сервопривода.
Определение сервопривода
Рулевой сервопривод – устройство с электродвигателем, которое позволяет добиться точного управления форматом движения радиоуправляемой модели путем отрицательной обратной связи. Любой сервопривод в своем устройстве имеет датчик и блок управления, который поддерживает определенные значения на датчике в соответствии с внешним параметром.
Опишем более простым языком, как работает сервопривод:
- Сервопривод получает импульсный сигнал – управляющее значение, которое определяет угол поворота качалки сервы,
- Блок управления начинает сравнение поступившего параметра со значением на своем датчике,
- В зависимости от результата сравнения БУ возвращает сигнал, который предопределяет, какое действие необходимо выполнить: повернуть, ускориться или замедлиться, чтобы сравниваемые показатели стали одинаковыми.

Устройство сервопривода
Большинство современных рулевых машинок построены по одному принципу и состоят из таких составных частей: выходной вал, шестерни редуктора, двигатель постоянного тока, потенциометр, печатная плата и управляющая электроника.
Редуктор вместе с мотором образуют привод. Чтобы трансформировать поступающее напряжение в механический поворот, нужен электродвигатель. Редуктор же – конструкция из шестеренок – преобразует крутящий момент и служит для понижения скорости вращения двигателя, так как часто она настолько большая, что совсем не годится для практического применения.
Вместе с включением и выключением электродвигателя вращается и выходной вал, к которому закрепляется качалка – ее, в свою очередь, крепят к рулю модели. Именно качалка будет задавать движение нашей модели, а для этого в устройстве сервопривода предусмотрен потенциометр – датчик, способный превратить угол поворота обратно в электросигнал.
Однако, одним из главных элементов является плата управления, которая представляет собой электронную схему.
Кстати, в качестве мотора в устройстве сервопривода могут использоваться коллекторные, коллекторные Coreless и бесколлекторные двигатели.
Управление сервоприводом. Принцип работы
Сервопривод получает импульсные сигналы, которые проходят по специальному проводу от приемника. Частота таких сигналов составляет 20мс, а их продолжительность может варьироваться в пределах 0,8-2,2мс. Чтобы у вас появилось четкое представление, как все-таки сигнал трансформируется в перемещение качалки, нужно проанализировать стандартную схему сервы.
ГОП – генератор опонного импульса (к нему подсоединен потенциометр), К – компататор, УВХ – устройство выборки-хранения, М – электрический мотор, который охватывается диагональю силового моста.
Теперь разберём более подробно, как работает сервопривод. Итак, импульсный сигнал поступает от ресивера на компататор и в то же время активирует ГОП. Продолжительность опорного импульса связана с положением потенциометра, который соединен с выходным валом физически. Когда качалка находится в средней позиции, длина сигнала составляет 1,5мс, если же положение крайнее – 0,8 или 2,2 мс. Управляющий сигнал и опорный импульс анализируются компататором, который рассчитывает их разностную величину (расчет ведется по длительности импульсов). Именно длина разностного импульса и определяет насколько «ожидаемое» и «фактическое» состояние руля совпадает. Полученный показатель сохраняется в качестве потенциала в УВХ. Сложно?
Итак, импульсный сигнал поступает от ресивера на компататор и в то же время активирует ГОП. Продолжительность опорного импульса связана с положением потенциометра, который соединен с выходным валом физически. Когда качалка находится в средней позиции, длина сигнала составляет 1,5мс, если же положение крайнее – 0,8 или 2,2 мс. Управляющий сигнал и опорный импульс анализируются компататором, который рассчитывает их разностную величину (расчет ведется по длительности импульсов). Именно длина разностного импульса и определяет насколько «ожидаемое» и «фактическое» состояние руля совпадает. Полученный показатель сохраняется в качестве потенциала в УВХ. Сложно?
Принцип работы сервопривода в разных условиях
Позиция качалки сервы соответствует состоянию стика пульта управления. Продолжительность опорного и управляющего импульсов одинакова. На всех выходах компататоров выставлено значение «0». Двигатель обесточен и качалка удерживает первоначальную позицию.
Пилот меняет положения стика, тем самым увеличивая управляющий импульс. На одном выходе компататора выведется разностный импульс, который будет сохранен в памяти УВХ. В этот момент на двигатель будет подано напряжение, станет вращаться, а вместе с ним и редуктор начнет движение, поворачивая качалку и потенциометр таким образом, чтобы продолжительность опорного импульса увеличивалась. Такие условия продлятся до тех пор, пока длины обоих импульсов не достигну одинаковых значений. Затем двигатель прекратит свое вращение.
На одном выходе компататора выведется разностный импульс, который будет сохранен в памяти УВХ. В этот момент на двигатель будет подано напряжение, станет вращаться, а вместе с ним и редуктор начнет движение, поворачивая качалку и потенциометр таким образом, чтобы продолжительность опорного импульса увеличивалась. Такие условия продлятся до тех пор, пока длины обоих импульсов не достигну одинаковых значений. Затем двигатель прекратит свое вращение.
Пилот отводит стик пульта в противоположную сторону, уменьшая при этом длину управляющего импульса. Управление сервоприводом на этом этапе схоже с процессом, описанном выше. На нижнем выходе компататора образуется разностный импульс, который запоминается УВХ и подает напряжение на двигатель. Мотор начинает вращаться, но уже в другую сторону, и продолжает работу до того момента, как длины импульсов снова не примут одинаковые значения.
Пилот не взаимодействует с пультом управления. Руль модели начинает поворачивать качалку сервопривода, так как учитывает нагрузку во время хода. Теперь меняется продолжительность опорного импульса, за счет чего разностный импульс посредством компататора и УВХ воздействует на двигатель и осуществляется подача момента на редуктор, что препятствует повороту качалки. Т. е. качалка удерживается в одном положении.
Теперь меняется продолжительность опорного импульса, за счет чего разностный импульс посредством компататора и УВХ воздействует на двигатель и осуществляется подача момента на редуктор, что препятствует повороту качалки. Т. е. качалка удерживается в одном положении.
Мы разобрали работу сервопривода в упрощенном варианте. На самом деле существует множество нюансов по настройке и использования девайса, зная которые можно избежать поломок и неприятных ситуаций.
Теперь, понимая, как устроен сервопривод, принцип его работы, можно отправляться и выбирать девайс для своей модели. Для этого вам нужно перейти в правильный раздел сайта «Planeta Hobby». Если же вы не знаете, как правильно подобрать серву для своего самолета или авто, обращайтесь за советом нашего консультанта или читайте эту полезную статью.
Серводвигатель: конструкция, типы, схема, детали, работа
Серводвигатель — это тип двигателя, который имеет высокую степень точности вращения. Серводвигатели часто имеют схему управления, которая обеспечивает обратную связь о текущем положении вала двигателя; эта обратная связь позволяет им вращаться с большой точностью. Серводвигатель используется, когда вы хотите повернуть объект на заданный угол или расстояние. Он состоит не более чем из простого двигателя, соединенного с сервомеханизмом. Серводвигатель постоянного тока питается от источника постоянного тока, тогда как серводвигатель переменного тока питается от источника переменного тока.
Серводвигатель используется, когда вы хотите повернуть объект на заданный угол или расстояние. Он состоит не более чем из простого двигателя, соединенного с сервомеханизмом. Серводвигатель постоянного тока питается от источника постоянного тока, тогда как серводвигатель переменного тока питается от источника переменного тока.
В этой статье вы узнаете определение, области применения, конструкцию, детали, схему, типы, принцип работы, механизм, преимущества и недостатки серводвигателя.
Read more: Understanding Engine Starter Motor
Contents
What is a servo motor?
Серводвигатель представляет собой линейный или поворотный привод, обеспечивающий точное управление положением в приложениях с обратной связью. Серводвигатели не подходят для непрерывного преобразования энергии по сравнению с огромными промышленными электродвигателями. Из-за инерции эти двигатели имеют высокую скорость реакции и имеют малый диаметр и большую длину ротора.
Серводвигатели не подходят для непрерывного преобразования энергии по сравнению с огромными промышленными электродвигателями. Из-за инерции эти двигатели имеют высокую скорость реакции и имеют малый диаметр и большую длину ротора.
Скорость и конечное положение серводвигателей контролируются механизмом, использующим обратную связь по положению. Серводвигатель состоит из двигателя, цепи обратной связи, контроллера и еще одной электрической цепи внутри. Эти двигатели лучше всего подходят для небольших приложений. Благодаря высокоточному управлению серводвигатели переменного тока становятся все более популярными по мере развития микропроцессоров и мощных транзисторов.
Области применения
Применение серводвигателей широко распространено в промышленности из-за их высокой скорости реакции. Ниже приведены некоторые области применения серводвигателя:
- Серводвигатель, встроенный в камеру, позволяет улучшить снимки, сделанные не в фокусе, путем коррекции объектива.
- Этот двигатель используется для управления колесами роботизированного транспортного средства, создавая достаточный крутящий момент для движения, запуска, остановки и управления скоростью транспортного средства.
- В робототехнике серводвигатель используется для приведения в действие движений и придания руке точного угла.
- Они используются для запуска, перемещения и остановки конвейерных лент, которые транспортируют товары через несколько этапов. Маркировка, розлив и упаковка — вот лишь несколько примеров.
- Серводвигатели также используются в системах слежения за солнцем для фиксации угла солнечных панелей, чтобы все они были обращены к солнцу. Кроме того, они используются в металлоформовочном и режущем оборудовании, чтобы обеспечить фрезерные станки точным управлением движением.
- Текстильные изделия используют серводвигатели для управления прядильным и ткацким оборудованием, а также вязальными машинами и ткацкими станками.
- Автоматические устройства открывания дверей, которые можно увидеть в супермаркетах, больницах и театрах, используют серводвигатели для управления дверью.
- Сервомеханизм используется в усилителе руля, тормозных системах и круиз-контроле (скорости) в автомобилях.


Конструкция
Серводвигатель обеспечивает обратную связь по скорости и местоположению через энкодер или датчик скорости. Сигнал ошибки выдается, когда сигнал обратной связи сравнивается с положением входной команды (желаемое положение двигателя, соответствующее нагрузке) (если между ними существует разница).
Сигнал ошибки на выходе детектора ошибок недостаточен для запуска двигателя. В результате детектор ошибок совместно с сервоусилителем повышает уровень напряжения и мощности сигнала ошибки перед поворотом вала двигателя в заданное положение. Серводвигатели подразделяются на серводвигатели переменного и постоянного тока в зависимости от источника питания, необходимого для работы. Из-за их низкой стоимости, эффективности и простоты использования щеточные серводвигатели с постоянными магнитами используются для простых приложений.
Подробнее: Понимание гидроэлектростанции
Диаграмма сервопривода:
Части сервопривода
Следуя являются основными частями моторного мотор:
- .
- Подшипники
- Ротор
- Статор
- Тормоз
- Стопорное кольцо
- Уплотнительное кольцо
- Держатель подшипника
- Энкодер

3 Корпус
Вал двигателя
Он работает аналогично первичному двигателю, за исключением того, что редуктор или система ремней и шкивов, к которым он подключен, могут использовать эту энергию для увеличения крутящего момента двигателя при снижении его скорости. В большинстве случаев двигатель изготавливается из холоднокатаной или горячекатаной стали.
Подшипники
Мотору могут быть полезны подшипники, поскольку они обеспечивают высокую точность и минимальную вибрацию. В результате функционирование очень плавное и прохладное. Использование новых смазок и способов уменьшения истирания продлит срок службы подшипника.
Использование новых смазок и способов уменьшения истирания продлит срок службы подшипника.
Ротор
Ротор обычно крепится к валу двигателя и удерживается на месте двумя подшипниками. Ротор — это движущаяся часть серводвигателя. Ротор двигателя вращается в соответствующем направлении с заданным напряжением до тех пор, пока ошибка не станет равной нулю.
Подробнее: Резисторы в цепях переменного и постоянного тока
Присоединяйтесь к нашему информационному бюллетеню
Статор
Эта часть является неподвижной частью серводвигателя. Работа статора заключается в создании вращающегося магнитного поля, которое эффективно создает крутящий момент. Обычно он состоит из 12 отдельно намотанных сегментов обмотки, соединенных одним медным проводом.
Тормоз
Тормоз состоит всего из нескольких частей и используется для удержания предметов на месте, когда машина выключена или срабатывает аварийный останов. Имейте в виду, что при подаче напряжения пружина отпустит, поэтому будьте осторожны при отпускании тормозов, потому что двигатель упадет.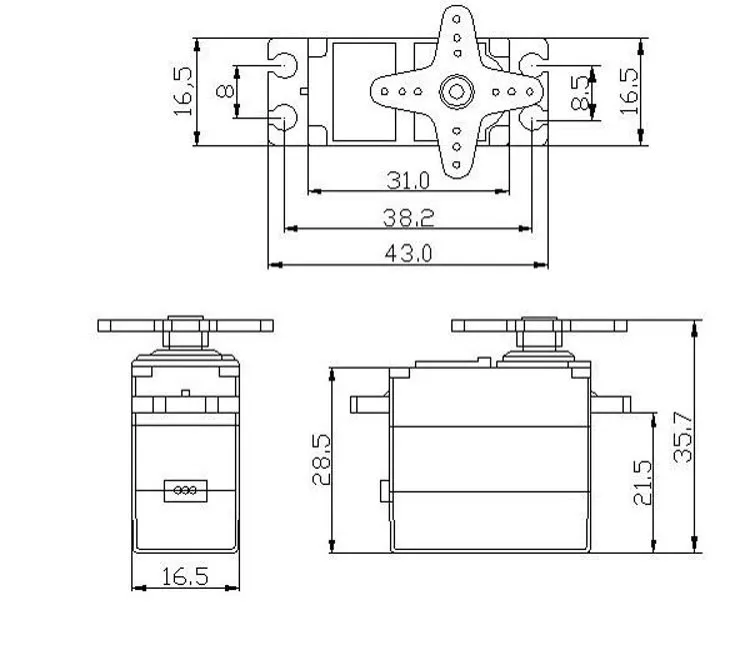
Стопорное кольцо
После прямого удара или толчка от нежелательной силы стопорное кольцо предотвращает повреждение двигателя, сохраняя при этом положение вала. Вал просто скользнул бы обратно в корпус, если бы его не было.
Уплотнительное кольцо
Для предотвращения попадания жидкости между двумя деталями устанавливается уплотнительное кольцо, образующее уплотнение. Серводвигатели состоят из нескольких уплотнительных колец, изготовленных из пластиковых полимеров.
Фиксатор подшипника
Фиксатор подшипника представляет собой переносную пластину, которая предотвращает соскальзывание подшипника со своего места рядом с концом шкива.
Энкодер
Энкодер — это электромеханическое устройство, которое сообщает приводу скорость и направление вращения двигателя. Это дает оператору возможность отслеживать и изменять определенные параметры на лету. Они легкие по весу и небольшие по размеру.
Серводвигатель Диаграмма 2:
Подробнее: Система передачи и распределения электроэнергии
Типы серводвигателей
Ниже приведены различные типы серводвигателей:0003
- Серводвигатель постоянного тока
- Серводвигатель переменного тока
- Положительное вращение
- Постоянное вращение
- Линейный серводвигатель
Серводвигатель постоянного тока
. Крошечный двигатель постоянного тока, потенциометр обратной связи, редуктор, схема привода двигателя и контур управления с обратной связью — все это части серводвигателя постоянного тока. Он очень похож на стандартный двигатель постоянного тока.
Крошечный двигатель постоянного тока, потенциометр обратной связи, редуктор, схема привода двигателя и контур управления с обратной связью — все это части серводвигателя постоянного тока. Он очень похож на стандартный двигатель постоянного тока.
Управление током якоря или током возбуждения для управления двигателем. Благодаря низкому индуктивному сопротивлению якоря они дают очень точную и быструю реакцию на сигнал команды пуска или останова. Эти двигатели используются в устройствах с числовым программным управлением, которые компьютеризированы.
Серводвигатель переменного тока
Энкодеры встроены в двигатели переменного тока и используются вместе с контроллерами для обеспечения обратной связи и управления с обратной связью. Этот двигатель имеет высокий конструктивный допуск и может обеспечить высокую точность. В некоторых конструкциях также используются более высокие напряжения для увеличения крутящего момента. Из-за требуемой высокой степени точности и универсальности они используются в автоматизации, робототехнике, станках с ЧПУ и других приложениях.
Положительное вращение
В этом типе серводвигателя выходной вал двигателя вращается на 180 градусов. Физические тормоза в системе передач не позволяют вращаться датчику вращения, который является основным компонентом двигателя. Их можно найти, среди прочего, в радиоуправляемой воде, радиоуправляемых автомобилях, самолетах, робототехнике и игрушках.
Непрерывное вращение
Это обычные типы серводвигателей, которые были модифицированы для обеспечения управления скоростью без обратной связи, а не для управления положением с обратной связью, которое они обычно обеспечивают. Вместо определения положения сервопривода управляющий сигнал интерпретируется как скорость и направление вращения. Сервопривод для вращения по часовой стрелке или против часовой стрелки с различной скоростью в диапазоне доступных источников команд. Приложение можно найти в приводном двигателе мобильного робота.
Линейный серводвигатель
Линейные серводвигатели аналогичны серводвигателям позиционного вращения, но имеют дополнительный набор шестерен для преобразования O/P из кругового в линейное. Эти серводвигатели встречаются редко, однако иногда они используются в качестве приводов в более крупных моделях самолетов.
Эти серводвигатели встречаются редко, однако иногда они используются в качестве приводов в более крупных моделях самолетов.
Подробнее: Электрическая система автомобиля
Механизм серводвигателя
Управляемое устройство, выходной датчик и система обратной связи являются тремя основными компонентами сервосистемы. Это замкнутая система управления, работающая автоматически. Вместо использования переменного входного сигнала для управления устройством для управления устройством используется сигнал обратной связи, генерируемый путем сравнения выходного сигнала и эталонного входного сигнала.
Когда в систему подается эталонный входной сигнал или командный сигнал, он сравнивается с выходным эталонным сигналом выходного датчика и третьим сигналом, создаваемым системой обратной связи. Этот третий сигнал является входным сигналом управляемого устройства. Пока существует логическая разница между эталонным входным сигналом и выходным сигналом системы, этот входной сигнал устройства присутствует.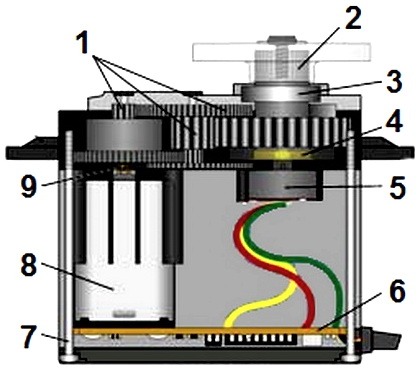
Не будет никакой логической разницы между эталонным входным сигналом и эталонным выходным сигналом системы, как только устройство достигнет желаемого выходного сигнала. Затем, пока в систему не будет подан следующий входной сигнал или командный сигнал, третий сигнал, полученный путем сравнения этих вышеперечисленных сигналов, будет недостаточным для работы устройства и создания дополнительного выходного сигнала системы.
Таким образом, основной функцией сервомеханизма является поддержание постоянной производительности системы перед лицом помех.
Принцип работы
Работа серводвигателя проще и понятнее. Подход широтно-импульсной модуляции используется для управления серводвигателем. Длительность подаваемого импульса на его управляющий штифт в этом случае определяет угол поворота. Серводвигатель — это, по сути, двигатель постоянного тока, который управляется переменным резистором (потенциометром) и набором шестерен. см. рабочую схему ниже:
Серводвигатель постоянного тока состоит из следующих компонентов: двигатель постоянного тока, датчик положения, редуктор и схема управления. Крошечный двигатель постоянного тока используется в серводвигателе постоянного тока для управления нагрузками с точной скоростью и местоположением. Опорное напряжение постоянного тока теперь подключено к желаемому выходу. В зависимости от схемы управления это напряжение подается на преобразователь напряжения через потенциометр, регулируя ширину импульса, или с помощью таймера. Циферблат потенциометра генерирует напряжение, которое затем подается на усилитель ошибки.
Крошечный двигатель постоянного тока используется в серводвигателе постоянного тока для управления нагрузками с точной скоростью и местоположением. Опорное напряжение постоянного тока теперь подключено к желаемому выходу. В зависимости от схемы управления это напряжение подается на преобразователь напряжения через потенциометр, регулируя ширину импульса, или с помощью таймера. Циферблат потенциометра генерирует напряжение, которое затем подается на усилитель ошибки.
Подробнее: Знакомство с ультраконденсаторами
В некоторых схемах используется метод импульсного управления для обеспечения опорного напряжения постоянного тока, соответствующего заданному положению или скорости двигателя. Затем ширина импульса подается на преобразователь напряжения. Когда импульс высокий, конденсатор начинает заряжаться с постоянной скоростью через этот преобразователь. Когда импульс низкий, заряд конденсатора передается на буферный усилитель, а затем этот заряд передается на усилитель ошибки.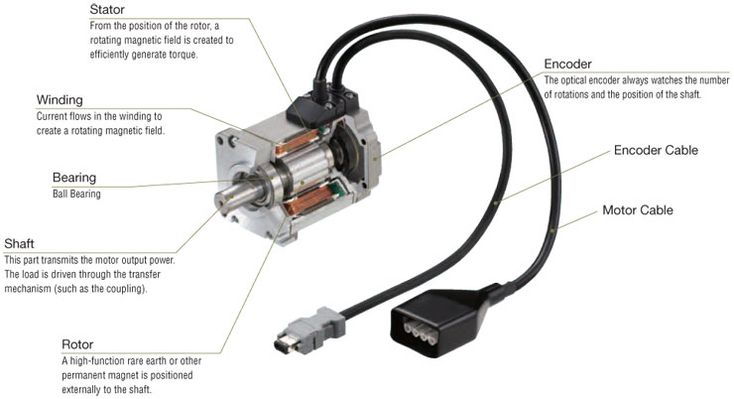
В результате напряжение, подаваемое на усилитель ошибки в качестве соответствующего напряжения для создания желаемой скорости или положения, определяется длиной импульса. Датчик положения используется для получения сигнала обратной связи, соответствующего текущему положению груза. Обычно этот датчик представляет собой потенциометр, который обеспечивает напряжение, пропорциональное абсолютному углу вала двигателя, через механизм редуктора.
Посмотрите видео ниже, чтобы узнать больше о работе серводвигателя:
Преимущества и недостатки серводвигателя
Преимущества:
Ниже перечислены преимущества серводвигателей в различных областях применения:
- Они способны обеспечить большую выходную мощность, учитывая их размер и вес.
- Имеет высокий КПД до 90% при малых нагрузках.
- Двигатель имеет высокое отношение крутящего момента к моменту инерции и может быстро ускорять нагрузки.
- Работает тихо, плавно и с высокой точностью.
- По сравнению с другими двигателями постоянного тока положение серводвигателей можно контролировать более точно.

Недостатки:
Несмотря на преимущества серводвигателя, все же существуют некоторые ограничения. Ниже приведены недостатки серводвигателей в различных областях их применения:
- Недостаток серводвигателя заключается в том, что он требует регулировки для поддержания стабильности контура обратной связи.
- Двигатель будет ненадежным, если что-то сломается. В результате необходима защитная схема.
- Поскольку требуются компоненты обратной связи, общая стоимость системы и стоимость установки выше, чем для шагового двигателя.
- Чтобы предложить энкодер и электронную помощь, потребуется сложный контроллер.
Подробнее: Знакомство с типами конденсаторов
Заключение
Серводвигатель — это двигатель, который вращается с высокой степенью точности. Серводвигатели часто имеют схему управления, которая обеспечивает обратную связь о текущем положении вала двигателя, что позволяет им вращаться с большой точностью. Серводвигатели используются в различных отраслях промышленности и предлагают ряд преимуществ, о которых мы уже говорили. У них есть качества, которые делают их мощными и эффективными, а также множество механических решений.
Серводвигатели используются в различных отраслях промышленности и предлагают ряд преимуществ, о которых мы уже говорили. У них есть качества, которые делают их мощными и эффективными, а также множество механических решений.
Это все для этой статьи, где обсуждаются определение, применение, конструкция, детали, схема, типы, принцип работы, механизм, преимущества и недостатки серводвигателя. Надеюсь, вы многому научились из прочитанного, если да, поделитесь с другими учениками. Спасибо за чтение, увидимся!
Как работает серводвигатель?
Серводвигатели специально разработаны для использования в системах управления и робототехнике. Они используются для точного управления положением и скоростью при высоких крутящих моментах. Он состоит из подходящего двигателя, датчика положения и сложного контроллера. Серводвигатели можно охарактеризовать в зависимости от двигателя, управляемого сервомеханизмом, т. Е. Если двигатель постоянного тока управляется с помощью сервомеханизма, он называется серводвигателем постоянного тока. Таким образом майор 9Типы 0323 серводвигателя могут быть — (i) серводвигатель постоянного тока, (ii) серводвигатель переменного тока.
Таким образом майор 9Типы 0323 серводвигателя могут быть — (i) серводвигатель постоянного тока, (ii) серводвигатель переменного тока.
| Серводвигатель Изображение предоставлено: oomlout |
Доступны серводвигатели с номинальной мощностью от долей ватта до нескольких 100 ватт. Они обладают высоким крутящим моментом. Ротор серводвигателя выполнен меньше в диаметре и длиннее, чтобы иметь малую инерцию.
Что такое Сервомеханизм?
Сервомеханизм представляет собой замкнутую систему, состоящую из управляемого устройства, контроллера, выходного датчика и системы обратной связи. Термин сервомеханизм, скорее всего, применяется к системам, в которых необходимо контролировать положение и скорость.
Серводвигатели используются для очень точного управления положением и скоростью , но в простом случае можно управлять только положением. Механическое положение вала можно определить с помощью потенциометра, который соединен с валом двигателя через шестерни. Текущее положение вала преобразуется в электрический сигнал потенциометром и сравнивается с входным командным сигналом. В современных серводвигателях для определения положения вала используются электронные энкодеры или датчики.
Механическое положение вала можно определить с помощью потенциометра, который соединен с валом двигателя через шестерни. Текущее положение вала преобразуется в электрический сигнал потенциометром и сравнивается с входным командным сигналом. В современных серводвигателях для определения положения вала используются электронные энкодеры или датчики.
Ввод команды осуществляется в соответствии с требуемым положением вала. Если сигнал обратной связи отличается от заданного входа, генерируется сигнал ошибки. Затем этот сигнал ошибки усиливается и подается на вход двигателя, что заставляет двигатель вращаться. А когда вал достигает нужного положения, сигнал ошибки становится равным нулю, и, следовательно, двигатель останавливается, удерживая положение.
Ввод команды осуществляется в виде электрических импульсов. Поскольку фактический ввод, подаваемый на двигатель, представляет собой разницу между сигналом обратной связи (текущее положение) и поданным сигналом (требуемое положение), скорость двигателя пропорциональна разнице между текущим положением и требуемым положением. Количество энергии, необходимой двигателю, пропорционально расстоянию, которое ему необходимо преодолеть.
Количество энергии, необходимой двигателю, пропорционально расстоянию, которое ему необходимо преодолеть.
Как управляется серводвигатель?
Обычно серводвигатель поворачивается на 90° в любом направлении, т.е. максимальное перемещение может составлять 180°. Обычный серводвигатель не может вращаться дальше из-за встроенного механического упора.
Из сервопривода выведены три провода: плюс, масса и провод управления. Серводвигатель управляется путем отправки сигнала с широтно-импульсной модуляцией (ШИМ) по проводу управления. Импульс отправляется каждые 20 миллисекунд. Ширина импульсов определяет положение вала. Например, пульс
1 мс сдвинет вал против часовой стрелки на -90°, импульс 1,5 мс сдвинет вал в нейтральное положение на 0°, а импульс 2 мс сдвинет вал по часовой стрелке на +90°.
Когда серводвигателю подается команда двигаться путем подачи импульсов соответствующей ширины, вал перемещается в требуемое положение и удерживает его.