Электрический двигатель: основные принципы действия электродвигателей
Содержание
- 1 Электродвигатель постоянного тока
- 2 Электродвигатель переменного тока
- 3 Линейные электродвигатели
- 4 Использование электромоторов переменного тока в однофазной сети
- 5 Видео
Принцип работы электродвигателя основан на использовании эффекта электромагнитной индукции. Само устройство предназначено для создания механической энергии за счёт использования электрических полей. Тип и мощность получаемой энергии зависят от способа взаимодействия магнитных полей и собственно устройства электродвигателя. В зависимости от типа используемого напряжения двигатели классифицируют на постоянного и переменного тока.
Электродвигатели
Электродвигатель постоянного тока
Принцип действия этих двигателей основан на использования постоянных магнитных полей, создаваемых в корпусе устройства. Для их создания служит либо постоянный магнит, закреплённый на корпусе, либо электромагниты, расположенные по периметру ротора.
Основным отличием двигателей постоянного тока является наличие в их корпусе постоянно действующего магнита, закреплённого на корпусе машины. Мощность электродвигателя зависит от этого магнита, точнее от его поля. Магнитное поле в якоре создаётся при подключении к нему постоянного тока. Но для этого необходимо, чтобы полюса постоянного магнитного поля якоря менялись местами. Для этого используются специальные коллекторно-щёточные устройства. Они устроены в виде кольца-коллектора, зафиксированного на валу движка и подключённого к обмотке якоря. Кольцо разделено на сектора, разделённые диэлектрическими вставками. Соединение сектора коллектора с цепью якоря создаётся через скользящие по нему графитные щетки. Для более плотного контакта щётки прижимаются к кольцу коллектора пружинами. Графит применяется ввиду своей скользящей способности, высокой теплопроводности и мягкости. Его применение практически не вредит проводникам коллектора.
При большой мощности электромоторов постоянного тока использование постоянного магнита неэффективно из-за большого веса такого устройства и низкой мощности создаваемого постоянным магнитом поля. Для создания магнитного поля статора в этом случае используется конструкция из ряда катушечных электромагнитов, подключённых к отрицательной или положительной линии питания. Одноименные полюсы подключаются последовательно, их количество составляет от одного до четырёх, количество щёток соответствует количеству полюсов, но, в общем, конструкция якоря практически идентична вышеописанной.
Для создания магнитного поля статора в этом случае используется конструкция из ряда катушечных электромагнитов, подключённых к отрицательной или положительной линии питания. Одноименные полюсы подключаются последовательно, их количество составляет от одного до четырёх, количество щёток соответствует количеству полюсов, но, в общем, конструкция якоря практически идентична вышеописанной.
Для упрощения запуска электрического двигателя используют два варианта возбуждения:
- параллельное, при этом рядом с обмоткой якоря включается независимая регулируемая линия, используется для плавного регулирования оборотов вала;
- последовательное возбуждение, что говорит о способе подключения дополнительной линии, в этом случае существует возможность резкого наращивания количества оборотов или его снижения.
Нужно отметить, что этот тип моторов имеет регулируемую частоту оборотов, что достаточно часто используется в промышленности и транспорте.
Интересно.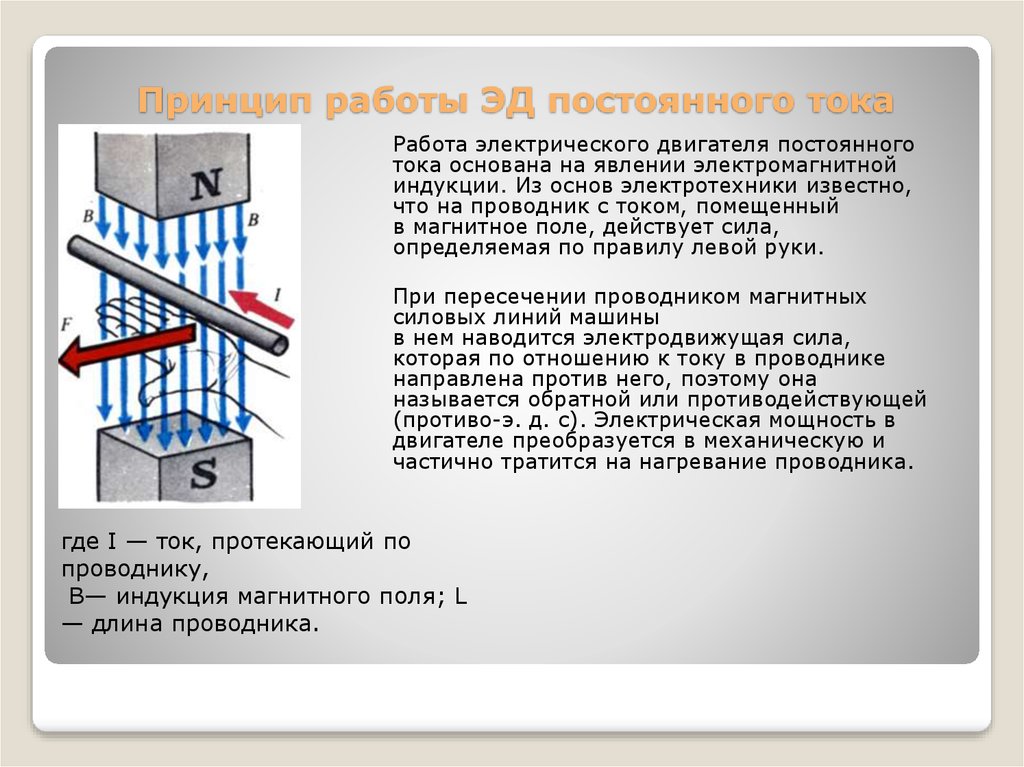 В станках используются двигатели с параллельным возбуждением, что позволяет использовать регулировку количества оборотов, в то же время для грузоподъёмного оборудования подходит последовательное возбуждение. Даже эта особенность двигателей поставлена на службу человечеству.
В станках используются двигатели с параллельным возбуждением, что позволяет использовать регулировку количества оборотов, в то же время для грузоподъёмного оборудования подходит последовательное возбуждение. Даже эта особенность двигателей поставлена на службу человечеству.
Двигатель постоянного тока
Электродвигатель переменного тока
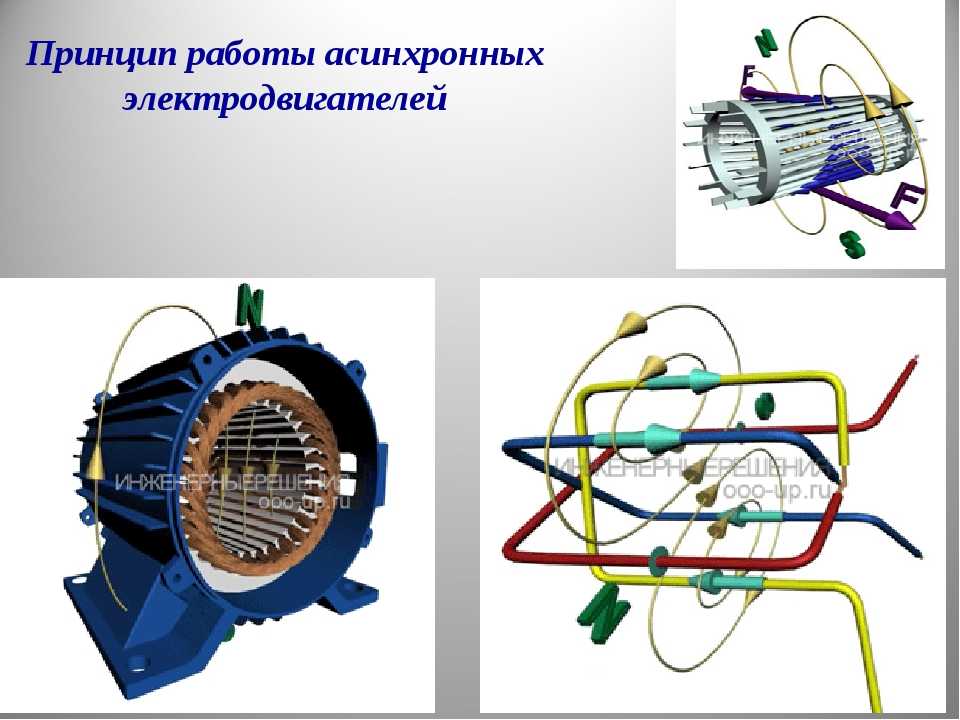
Принцип работы асинхронного двигателя
Устройство и принцип действия электродвигателя переменного тока впервые описал и запатентовал физик Никола Тесла, патент Великобритании за номером 6481. Но этот мотор не получил широкого распространения из-за низких пусковых характеристик, не смог найти решение пуска. Нужно отметить, что Тесла являлся основным апологетом развития этого типа двигателей, в отличие от Эдисона, который как раз ратовал за использование сетей постоянного тока.
Именно Тесла открыл явление, которое получило название сдвиг фаз, и предложил использовать его в электродвигателе, кроме того он опытным путём определил его наиболее эффективное значение в 90°.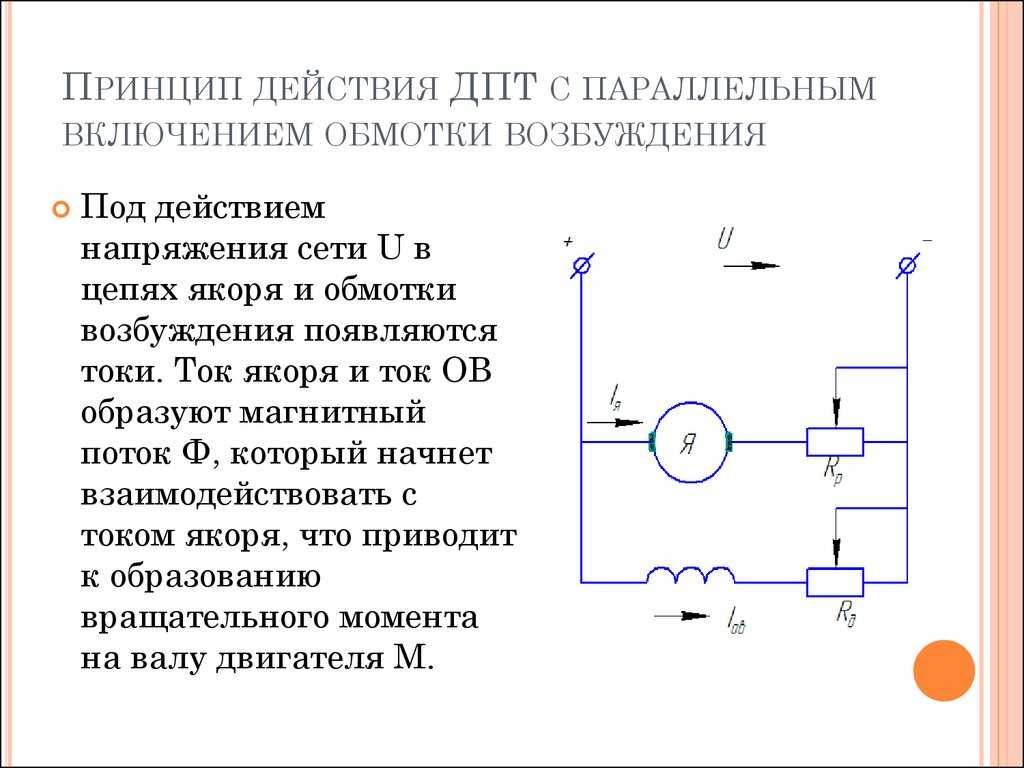 Кроме того, знаменитый физик обосновал использование вращающего магнитного поля в многофазных системах.
Кроме того, знаменитый физик обосновал использование вращающего магнитного поля в многофазных системах.
Но в 1890 году инженер М.О. Доливо-Добровольский создаёт первый рабочий образец асинхронного электродвигателя с якорем «беличье колесо» и с обмоткой статора по периметру окружности. В конструкции этого изделия нашли применение, как работа Никола Теслы, так и труды других инженеров и изобретателей. Справедливости ради нужно отметить, что элементы по отдельности были изобретены раньше, М. Доливо-Добровольский только совместил их в работоспособное устройство.
Вращающее магнитное поле, энергию которого использует этот тип электромотора, возникает в тройной обмотке статора, при подключении его к источнику тока. Ротор такого двигателя представляет собой металлический цилиндр, не имеющий обмотки. Магнитное поле статора за счёт объединения в короткозамкнутую систему с ротором возбуждает в нем токи. Они вызывают создание собственного магнитного поля якоря, которое, соединившись с вихревым полем статора, вызывает вращение ротора и объединённого с ним вала двигателя вокруг своей оси.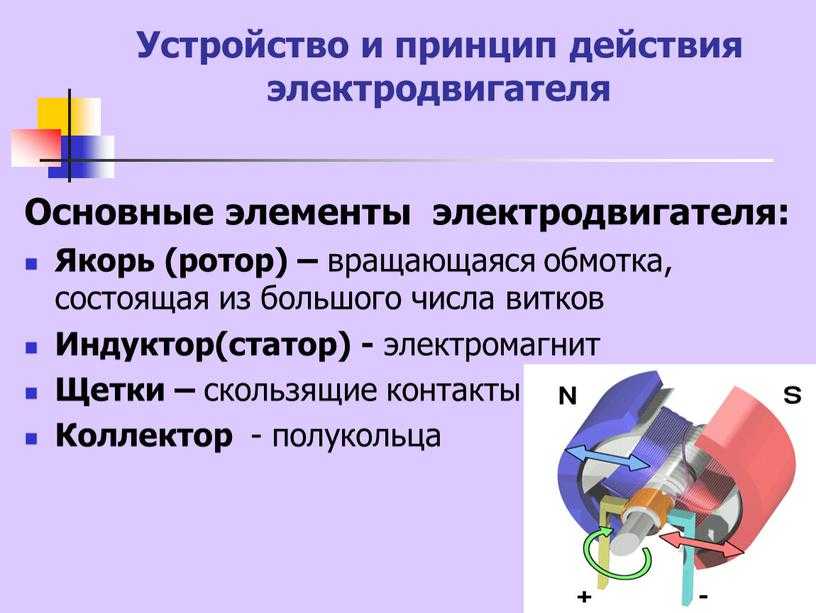
Название асинхронный двигатель получил из-за того, что поля не синхронизированы, магнитное поле статора имеет одинаковую скорость с полем якоря, но по фазе отстаёт от него.
Для запуска асинхронного электромотора требуются довольно значительные значения пусковых токов, это заметно и в реальности – при запуске в сеть станка или другого потребителя с таким мотором свет ламп накаливания зачастую мигает из-за падения напряжения в сети. Для упрощения пуска используют фазный ротор, это устройство якоря обычно используется в высокопроизводительных электродвигателях. Фазный ротор, в отличие от обычного, имеет на корпусе три обмотки, объединённые в «звезду». В отличие от статора, они не подключены к энергоисточнику, а соединены со стартовым устройством. Подключение устройства в сеть характеризуется падением сопротивления до нулевых значений. В результате двигатель запускается ровно и работает без перегрузки. Работа такого мотора довольно сложно регулируется, в отличие от моторов постоянного тока.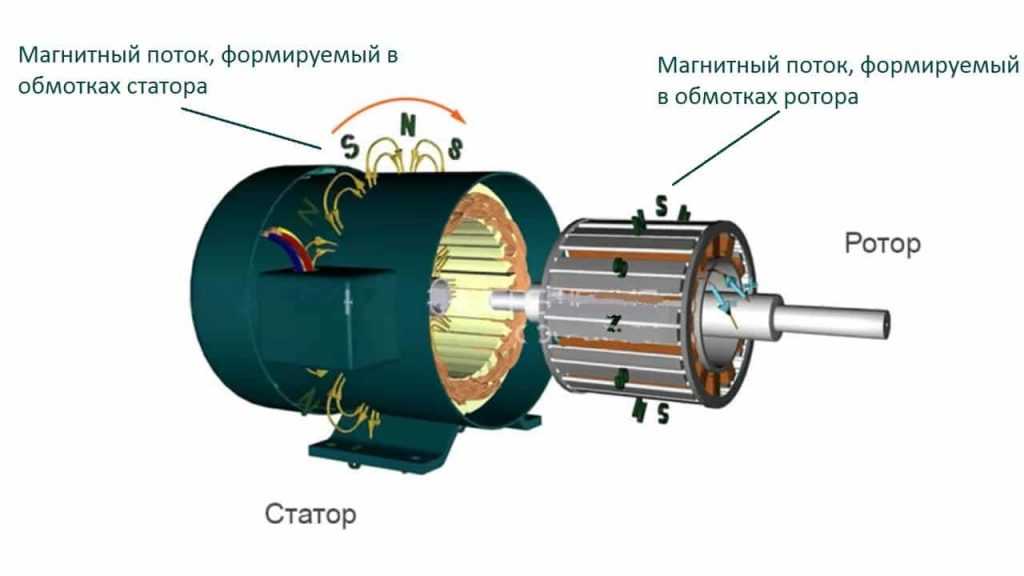
Интересно. Использование электромоторов переменного тока продвигал знаменитый Никола Тесла, в то время как энергию постоянного тока – не менее знаменитый Эдисон. В результате этого между двумя известнейшими учёными возник конфликт, продлившийся до самой смерти.
Двигатель переменного тока
Линейные электродвигатели
Для ряда устройств требуется не вращательное движение вала движка, а его возвратно-поступательное движение. Для того чтобы удовлетворить требования промышленников, конструкторами были разработаны и линейные электродвигатели. Понятно, что можно использовать для перехода вращательного движения в поступательное различные редукторы и коробки передач, но это усложняет конструкцию, делает её более дорогой, а также снижает её эффективность.
Статор и ротор такого устройства представляют собой полосы металла, а не кольцо и цилиндр как в традиционных моторах. Принцип действия электродвигателя заключается в возвратно-поступательном движении ротора, которое возможно из-за электромагнитного поля, создаваемого статором с незамкнутой системой магнитопроводов. В самой конструкции при работе генерируется движущееся магнитное поле, которое воздействует на обмотку якоря с коллекторно-щеточным устройством. Возникающее поле смещает ротор только в линейном направлении, без придания ему вращения. Мощность электродвигателя линейного типа ограничена его устройством.
В самой конструкции при работе генерируется движущееся магнитное поле, которое воздействует на обмотку якоря с коллекторно-щеточным устройством. Возникающее поле смещает ротор только в линейном направлении, без придания ему вращения. Мощность электродвигателя линейного типа ограничена его устройством.
Недостатком этих двигателей являются: сложность их изготовления, достаточно высокая стоимость такого оборудования и низкая эффективность, хотя и выше чем использование вращения через редуктор.
Использование электромоторов переменного тока в однофазной сети
Принцип работы синхронного генератора
Получить вращающееся магнитное поле статора проще всего в трёхфазной сети, но, несмотря на то, можно использовать асинхронные движки и в однофазной, бытовой сети. Требуется лишь проведение некоторых расчетов и изменение конструкции двигателя.
Формула изменений такова:
- Размещение на статоре движка двух обмоток: стартовой и рабочей;
- Включение в цепь конденсатора позволит сдвинуть по фазе ток в стартовой обмотке 90°.
 Практически можно сделать так: объединить обмотки трехфазного асинхронного двигателя, две обмотки в одну и установить конденсатор на это соединение.
Практически можно сделать так: объединить обмотки трехфазного асинхронного двигателя, две обмотки в одну и установить конденсатор на это соединение.
Этот двигатель будет работать в бытовой сети, но, в отличие от двигателей постоянного тока, этот движок не регулируется по количеству оборотов, кроме того слабо переносит критические нагрузки и имеет меньший КПД. Мощность электродвигателя тоже сравнительно низка и во многом зависит от сети. Трехфазная сеть больше подходит для эксплуатации таких моторов.
В настоящее время электродвигатели широко распространены по всему миру. В числе их достоинств:
- высокое КПД, до 80%;
- высокая мощность двигателя при компактных размерах;
- неприхотливость в обслуживании;
- надежность;
- низкие требования к энергопитанию.
Но в тоже время существует ряд проблем, которые ограничивают их более широкое распространение. Так, например, их мобильность ограничивает источники питания – в настоящее время нет достаточно мощных источников питания, которые смогли бы обеспечить длительную функциональность такого устройства.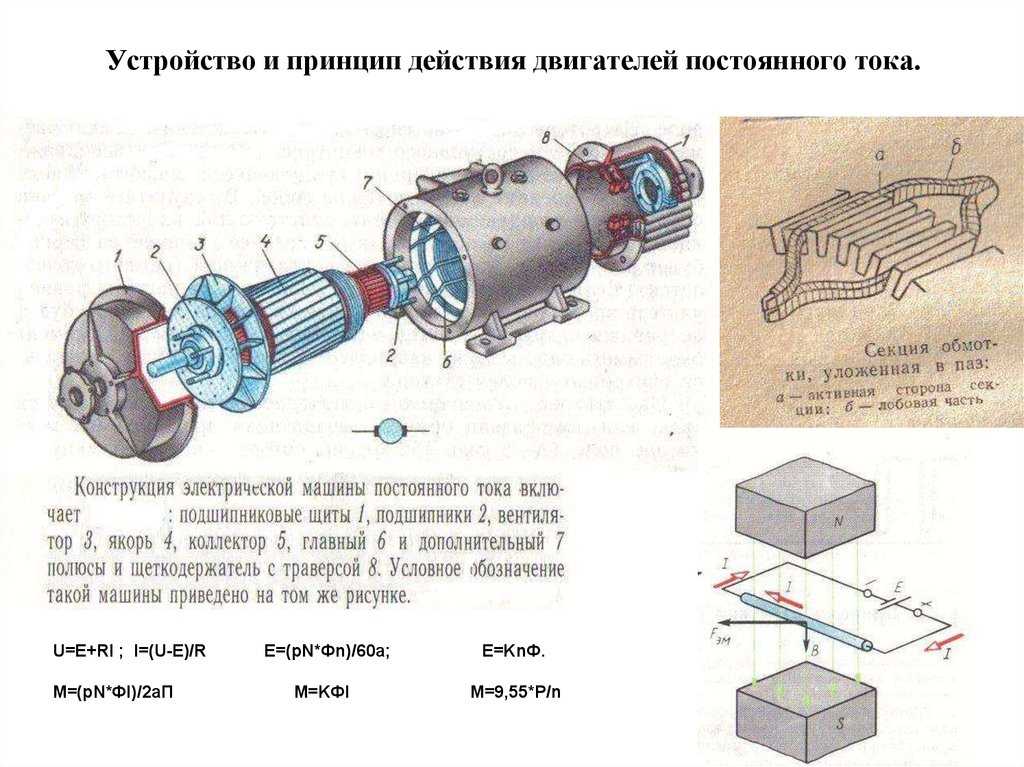 Единственным исключением из правил является атомный реактор. Гребные электродвигатели подводных лодок и кораблей имеют отличную автономность, но в то же время использование энергоносителей таких размеров невозможно в быту. Ситуацию могли бы исправить графеновые аккумуляторы, но их перспективы пока туманны.
Единственным исключением из правил является атомный реактор. Гребные электродвигатели подводных лодок и кораблей имеют отличную автономность, но в то же время использование энергоносителей таких размеров невозможно в быту. Ситуацию могли бы исправить графеновые аккумуляторы, но их перспективы пока туманны.
Электромобиль
Видео
Принцип работы генераторов тока в автомобилях
Оцените статью:
как он устроен и работает
Электрический двигатель представляет собой особый преобразователь. Это машина, где электрическая энергия преобразуется и переходит в механическую. Принцип действия двигателя основан на электромагнитной индукции. Есть к тому же и электростатические двигатели. Можно без особых дополнений использовать двигатели на других принципах преобразования электричества в перемещении. Но немногие знают, как устроен и как работает электродвигатель.
- Принцип работы устройства
- Работа трехфазного асинхронного двигателя
- Современная классификация
- Основные особенности
- Агрегаты пульсирующего тока
- Модификации переменного тока
- Универсальное коллекторное оборудование
Принцип работы устройства
В составе электродвигателя переменного тока присутствуют неподвижные и подвижные части. К первым относят:
К первым относят:
- индуктор.
Статор находит применение для машин синхронного и асинхронного типа. Индуктор эксплуатируется в машинах постоянного тока. Подвижная часть состоит из ротора и якоря. Первый применяют для синхронных и асинхронных устройств, тогда как якорь используется для оборудования с постоянными показателями. Функция индуктора лежит на двигателях небольшой мощности. Здесь нередко используют постоянные магниты.
Говоря о том, как устроен электродвигатель, необходимо определить, к какому классу оборудования относится конкретная модель. В конструкции асинхронного двигателя ротор бывает:
- короткозамкнутым;
- фазным, то есть с обмоткой.
Последний тип используется, если требуется уменьшить пусковой ток и отрегулировать частоту вращения асинхронного электродвигателя. Обычно речь идет о крановых электродвигателях, повсеместно используемых в крановых установках.
Кран обладает подвижностью и применяется в машинах постоянного тока.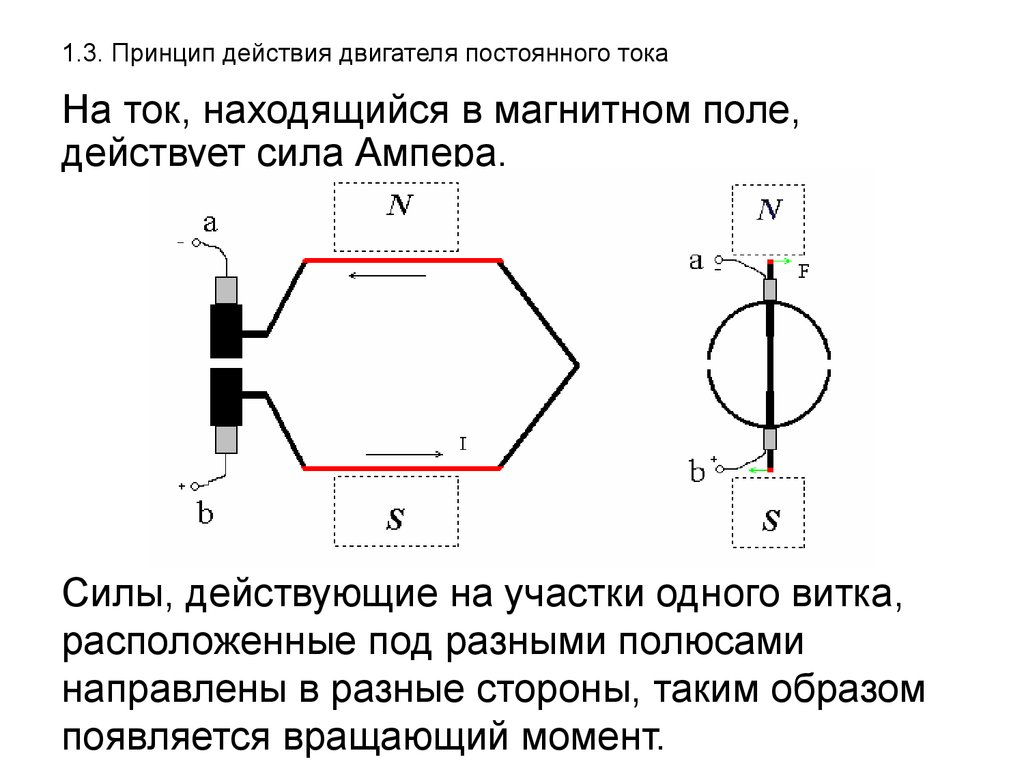
- емкостным;
- индуктивным.
Вот почему любой электроинструмент, если из него извлекается электронный блок, сможет работать и на постоянном токе. Но при этом напряжение в сети будет меньше. Принцип действия электродвигателя определяется сообразно тому, из каких компонентов он состоит и для каких целей предназначается.
Работа трехфазного асинхронного двигателя
Во время включения в сеть формируется вращающееся магнитное поле. Оно отмечается в статоре и проникает через короткозамкнутую обмотку ротора. В ней переходит в индукцию. После этого, в соответствии с законом Ампера, ротор начинает вращаться.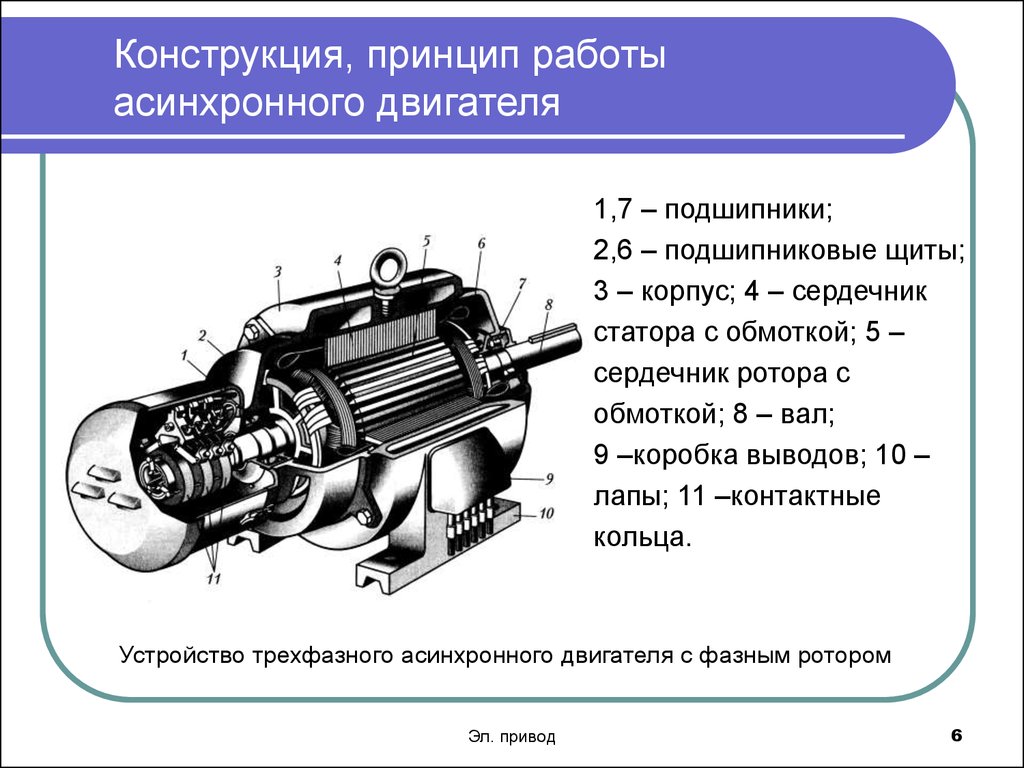
Разность между частотой вращения ротора и магнитного поля статора выражается в виде скольжения. Двигатель именуют асинхронным, потому что частота вращения магнитного поля у него сообразна с частотой вращения ротора. Синхронный двигатель имеет отличия в конструкции. Ротор дополняется магнитом постоянного типа либо электромагнитом. В нём имеются элементы, такие как для запуска беличья клетка и постоянные магниты. Также их роль могут выполнять электромагниты.
В асинхронном двигателе у магнитного поля статора частота вращения совпадает с аналогичным показателем у ротора. Для включения используют асинхронные электродвигатели вспомогательного типа либо ротор с короткозамкнутой обмоткой. Асинхронные двигатели смогли найти широкое применение во всех технических областях.
Особенно это актуально в отношении трехфазных двигателей, характеризующихся простотой конструкции. Они не только доступны по цене, но и надежнее в сравнении с электрическими. Ухода они не требуют почти никакого. Название асинхронный, присвоенное им, обусловлено несинхронным вращением ротора в таком двигателе. Если отсутствует трехфазная сеть, такой двигатель может включаться в сеть однофазного тока.
Они не только доступны по цене, но и надежнее в сравнении с электрическими. Ухода они не требуют почти никакого. Название асинхронный, присвоенное им, обусловлено несинхронным вращением ротора в таком двигателе. Если отсутствует трехфазная сеть, такой двигатель может включаться в сеть однофазного тока.
В составе статора асинхронного электродвигателя присутствует пакет. В нём имеются лакированные листы электротехнической стали, чья толщина составляет 0,5 мм. У них есть пазы, куда уложена обмотка. Три фазы обмотки соединены друг с другом треугольником или звездой, которые смещены на 120 градусов пространственно.
Если речь идет о роторе электродвигателя, в котором имеются контактные кольца в пазах, здесь отмечается ситуация, похожая на обмотку статора. Это актуально, если он включён звездой либо начальные концы фаз соединены тремя контактными кольцами, зафиксированными на валу. Когда двигатель запущен, можно подключить реостат на фазы обмотки для контроля частоты вращения.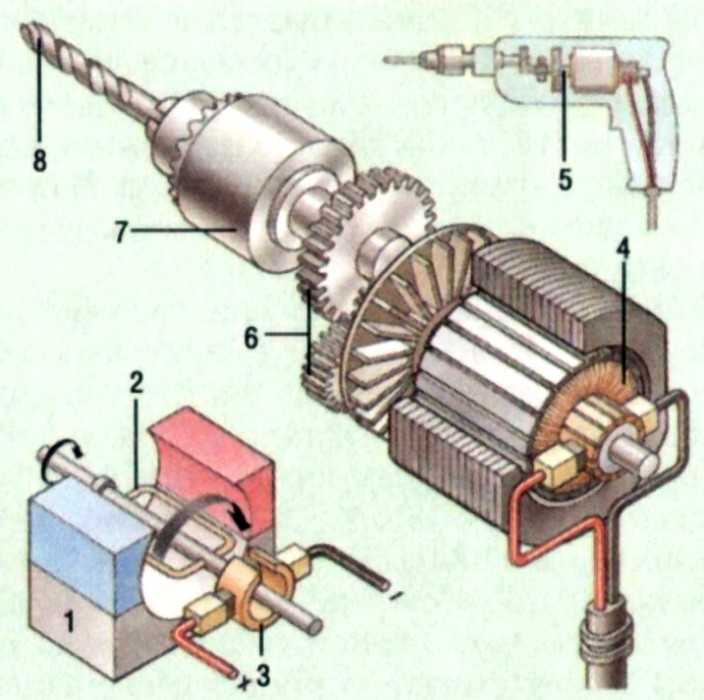 После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
Современная классификация
По принципу формирования вращающего момента двигатели электрического типа делят на магнитоэлектрические и гистерезисные. Последняя группа отличается тем, что вращающий момент здесь формируется вследствие гистерезиса при чрезмерном намагничивании ротора. Такие двигатели не считаются классическими и не так распространены в промышленности. Наибольшее распространение получили магнитоэлектрические модификации, которые делятся на две большие группы, согласно потребляемой энергии. Это двигатели переменного и постоянного тока. Выпускаются также универсальные модели, которые способны питаться обоими видами электрического тока.
Основные особенности
Было бы правильно называть эти устройства электрическими нефазными. Это обусловлено тем, что фазы переключаются здесь непосредственно в двигателе.
Что касается типа возбуждения, коллекторные двигатели подразделяют на модели с самовозбуждением, моторы с независимым возбуждением от постоянных магнитов и электромагнитов. Первый тип, в свою очередь, классифицируется на моторы с последовательным, параллельным, смешанным возбуждением.
Бесколлекторные, или вентильные изделия, работают от электричества. В них переключение фаз происходит посредством специального электроблока, носящего название инвертора. Процесс этот может оснащаться обратной связью, когда пускают в ход датчик положения ротора либо без обратной связи. Такое устройство можно фактически позиционировать, как аналог асинхронного устройства.
Агрегаты пульсирующего тока
Такой двигатель является электрическим, и питание у него осуществляется пульсирующим электротоком.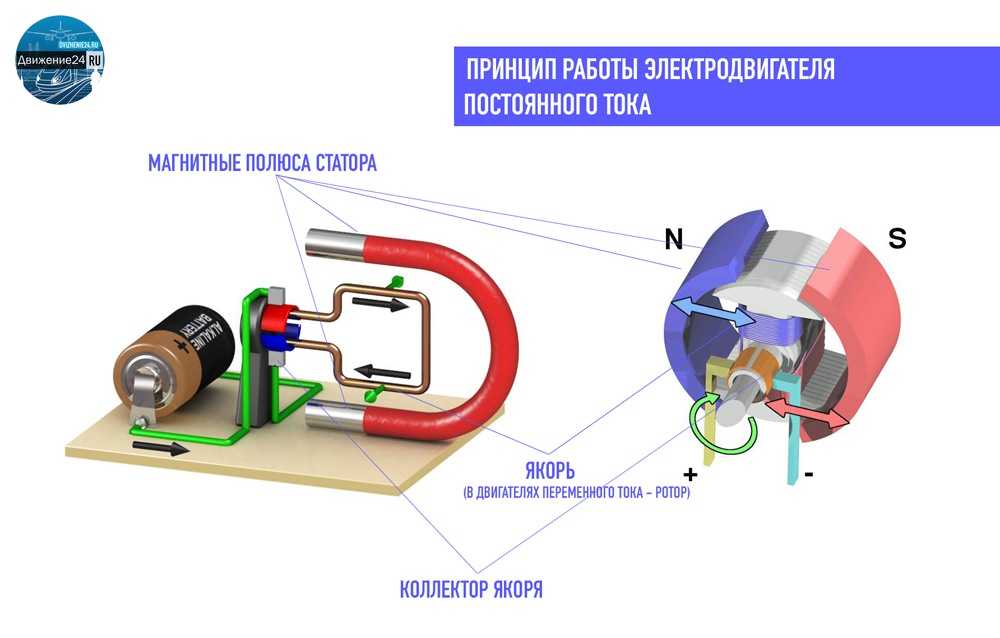 Конструкционные особенности его схожи с аналогичными особенностями у устройств постоянного тока. Конструктивные отличия его от двигателя с постоянными показателями состоят в присутствии шихтованных вставок для выпрямления переменного тока. Используют его на электровозах со специальными установками. Характерной особенностью является наличие компенсационной обмотки и значительного количества пар полюсов.
Конструкционные особенности его схожи с аналогичными особенностями у устройств постоянного тока. Конструктивные отличия его от двигателя с постоянными показателями состоят в присутствии шихтованных вставок для выпрямления переменного тока. Используют его на электровозах со специальными установками. Характерной особенностью является наличие компенсационной обмотки и значительного количества пар полюсов.
Модификации переменного тока
Двигатель представляет собой устройство, питание которого происходит с переменным током. Агрегаты эти бывают асинхронными и синхронными. Различие состоит в том, что в асинхронных машинах магнитодвижущая сила статора перемещается со скоростью вращения ротора. У асинхронного оборудования всегда наблюдается разница между скоростью вращения магнитного поля и ротора.
Синхронный электродвигатель работает от переменного тока. Ротор здесь вращается сообразно движению магнитного поля питающего напряжения. Синхронные электродвигатели делятся на модификации с обмотками возбуждения, с постоянными магнитами, а также на реактивные модификации, гистерезисные, шаговые, гибридные реактивные типы устройств.
Выделяют и так называемый реактивно-гистерезисный тип. Выпускают также модели с шаговыми агрегатами. Здесь определённое положение ротора фиксируется подачей питания на определенные зоны обмотки. Переход в другое положение достигается посредством снятия напряжения с одних обмоток и перемещения его в другие области. Вентильные реактивные модели электрического типа формируют питание обмоток посредством полупроводниковых элементов. Асинхронное устройство имеет частоту вращения ротора, отличную от частоты вращающегося магнитного поля. Она создается питающим напряжением. Такие модели получили на сегодня наибольшее распространение.
Универсальное коллекторное оборудование
Такой агрегат может работать на переменном и постоянном токе. Изготавливают его с последовательной обмоткой возбуждения при показателях мощности до 200 Вт. Статор выполняется из особой электротехнической стали. Обмотка возбуждения осуществляется при постоянном показателе напряжения полностью и частично при переменном показателе. Номинальное напряжение для переменного электротока составляют 127 и 220 В, аналогичные показатели для постоянного параметра равны 110 и 220 В. Находят применение в электроинструментах и бытовых аппаратах.
Обмотка возбуждения осуществляется при постоянном показателе напряжения полностью и частично при переменном показателе. Номинальное напряжение для переменного электротока составляют 127 и 220 В, аналогичные показатели для постоянного параметра равны 110 и 220 В. Находят применение в электроинструментах и бытовых аппаратах.
То, как работает электродвигатель, зависит от его принадлежности к тому или иному типу оборудования. Модификации переменного тока с питанием от промышленной сети 50 Гц не дают получить частоту вращения больше 3000 оборотов в минуту. Вот почему для получения значительных частот используют коллекторный мотор электрического типа. Он к тому же легче и меньше по размерам, нежели устройства с переменными показателями с аналогичной мощностью.
В их отношении используют специальные передаточные механизмы, преобразующие кинематические параметры механизма до приемлемых. При использовании преобразователей частоты и при наличии сети повышенной частоты двигатели переменного тока легче и меньше коллекторных изделий.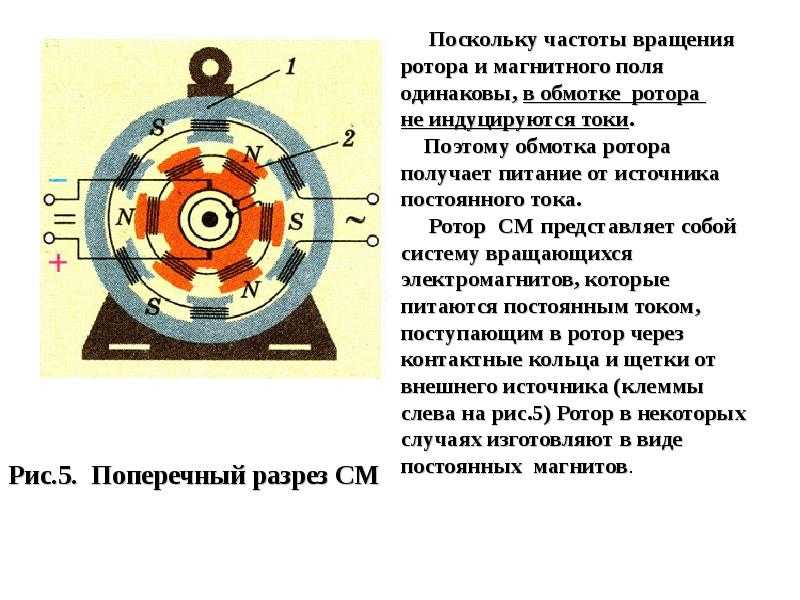
Ресурс асинхронных моделей с переменными показателями значительно выше, нежели у коллекторных. Определяется он состоянием подшипников и особенностями обмоточной изоляции.
Синхронный двигатель, у которого есть датчик положения ротора и инвертор, считается электронным аналогом коллекторного двигателя постоянного тока. Фактически он является коллекторным электродвигателем с последовательно включенными обмотками статора. Они идеально оптимизированы для работы с бытовой электросетью. Такую модель, независимо от полярности напряжения, можно вращать в одну сторону, так как последовательное соединение обмоток и ротора гарантирует смену полюсов из магнитных полей. Соответственно, результат остается направленным в одну сторону.
Статор из магнитного мягкого материала применим для работы на переменном токе. Это возможно, если сопротивление в перемагничивании у него незначительное. Чтобы снизить потери на вихревые токи, статор делают из изолированных пластин. Он получается наборным. Его особенностью является то, что потребляемый ток ограничивается за счёт индуктивного сопротивления обмоток. Соответственно, момент двигателя оценочно становится максимальным и варьируется от 3 до 5. Чтобы приблизить к механическим характеристикам двигатели общего назначения, применяются секционные обмотки. Они имеют отдельные выводы.
Чтобы снизить потери на вихревые токи, статор делают из изолированных пластин. Он получается наборным. Его особенностью является то, что потребляемый ток ограничивается за счёт индуктивного сопротивления обмоток. Соответственно, момент двигателя оценочно становится максимальным и варьируется от 3 до 5. Чтобы приблизить к механическим характеристикам двигатели общего назначения, применяются секционные обмотки. Они имеют отдельные выводы.
Примечательно, что для передвижения некоторыми видами бактерий используется электродвигатель из нескольких белковых молекул. Он способен трансформировать энергию электрического тока в форме движения протонов во вращении жгутика.
Синхронная модель возвратно-поступательного движения работает таким образом, что подвижная часть устройства оснащена постоянными магнитами. Они зафиксированы на шторке. Посредством неподвижных элементов постоянные магниты находятся под воздействием магнитного поля и проводят перемещение штока возвратно-поступательным методом.
Принцип действия электродвигателя постоянного тока
|
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье. Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. Что касается электрической то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. • Скачать лекцию: двигатели постоянного тока
Свежие записи: |
Принцип работы и устройство электродвигателя
Принцип работы электродвигателя
Рубрики статей
- Все
- Новости и новинки
- Новости компании
- Обзоры продукции
Отредактировано: 14. 01.2022
Электродвигатели преобразуют электрическую энергию в механическую. Таким образом, электрические двигатели противоположны генераторам, которые преобразуют механическое движение в электрическую энергию. Существует множество различных типов и конструкций электродвигателей. Однако все электродвигатели основаны на сходном принципе работы.
Объяснение магнитных полей и силы Лоренца
Электродвигатель использует важнейшую силу природы — силу Лоренца. Как это работает и почему электродвигатель может это сделать, мы сначала объясним вам на основе упрощенных основ, прежде чем мы перейдем к конструкции.
Каждый магнит имеет два полюса: северный и южный. Магнитные силы всегда действуют с севера на юг и воздействуют на так называемые ферромагнитные материалы (кобальт, железо, никель). Твердые тела, такие как железо, всегда притягиваются к магниту. Однако, если есть два магнита, случается следующее: одни и те же полюса отталкиваются друг от друга (южный и южный, северный и северный полюса) — разные полюса притягиваются (южный и северный).
Электричество также имеет два разных полюса. Здесь есть плюс и минус. Это называется электрическим зарядом . Плюс означает, что частица имеет положительный заряд. Минус означает, что частица имеет отрицательный заряд.
Воздействие на заряд (плюс или минус) в магнитном поле называется силой Лоренца. Проще говоря, северный магнитный полюс отталкивает положительный заряд и притягивает отрицательный. Южный магнитный полюс притягивает положительный заряд и отталкивает отрицательный. Каждый электродвигатель основан на этом принципе. Он использует магнитное воздействие постоянного магнита на электромагнит (который находится под напряжением и имеет заряд).
Устройство и функции двигателя
Так называемый статор расположен под корпусом электродвигателя. Он состоит из стабильного магнитного поля (постоянный магнит). Это означает, что северный и южный полюса имеют фиксированное положение и не меняются. Ротор (лат. rotare = крутить) находится в самом двигателе, прикреплен к валу и поэтому может вращаться. Его электрическое магнитное поле постоянно меняется: северный и южный полюса меняются местами. Ротор окружен статором. Якорь представляет собой железный сердечник ротора. На него намотаны катушки ротора, по которым течет ток. С помощью этих катушек создается изменяющееся магнитное поле. Если якорь представляет собой постоянный магнит, то катушек нет.
Коммутатор (также называемый переключателем полюсов) сидит на валу ротора. Ток течет через него. Его задача — повернуть магнитное поле ротора и, таким образом, поменять местами полюса. Это всегда происходит при достижении определенного положения. К коммутатору присоединены скользящие контакты, питающие ротор электричеством. Если электродвигатель теперь находится под напряжением, в роторе создается магнитное поле. Только тогда он становится вращающимся электромагнитом.
По описанному выше принципу, что одноименные полюса всегда отталкиваются друг от друга, ротор начинает вращаться. Электромагнитное поле ротора всегда регулируется коммутатором таким образом, что северный полюс ротора и северный полюс статора (аналогично южному полюсу) обращены друг к другу. Проще говоря, через каждые пол-оборота меняется полярность ротора. В противном случае северный полюс и южный полюс были бы обращены друг к другу, и двигатель остановился бы.
Существует также вариант электродвигателя без коммутатора. В двигателях переменного тока магнитное поле изменяется в соответствии со скоростью вращения ротора. Одни и те же полюса «автоматически» обращены друг к другу. В этом случае структура немного отличается. Тем не менее, основные части остаются.
Разновидности электродвигателей
На данный момент используют большое количество электродвигателей, которые отличаются конструкцией. В основном их делят по двум характеристикам.
Принцип электропитания:
- Переменного тока, когда двигатель работает, получая питание непосредственно от электросети.
- Постоянного тока, когда двигатель работает от источника постоянного тока (батареек, аккумуляторов и т.п.).
Принцип работы:
- Синхронный, вращение происходит в синхронизации с магнитным полем, вызывающим движение.
 У таких двигателей есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
У таких двигателей есть обмотки на роторе и щеточный механизм для подачи на них электрического тока. - Асинхронный, вращающийся ротор движется медленнее вращающегося магнитного поля в статоре. В таком двигателе нет щеток и обмоток на роторе, и он является одним из самых распространенных, что объясняется его простотой.
Если стоит выбор, где купить электродвигатель, выбирайте надёжного поставщика. Компания «АнЛан» занимает лидирующие позиции на рынке РФ с 2007 года. Разумная цена и европейское качество — то, что отличает продукцию компании от других организаций.
Копирование контента с сайта Anlan.ru возможно только при указании ссылки на источник.
© Все права защищены.
Рекомендуемые статьи
Кабельные короба российского завода «Экопласт»
09
June
2020
Кабель-каналы Экопласт производятся из поливинилхлорида (ПВХ) в который добавляются специально разработанные и запатентованные добавки. Это позволило добиться высоких изоляционных свойств и повышенной устойчивости к горению, а значит добавило безопасности при эксплуатации.
Открыть
Новое поступление ИБП Импульс
24
March
2022
Рады сообщить, что на нашем сайте появилась новая линейка источников бесперебойного питания Импульс.
Открыть
Чем отличаются маркеры для кабеля и как их выбирать
16
July
2021
Кабельные маркеры обычно используются для маркировки и идентификации кабелей и проводов, что сокращает время, необходимое для поиска и устранения неисправностей, ремонта и обслуживания, а также повышает безопасность.
Открыть
Новые кабельные органайзеры Cаbeus
19
May
2021
В ассортименте кабельных органайзеров Cаbeus появились новые позиции.
Открыть
Система кабельных каналов Legrand DLP
29
June
2015
В этой статье мы расскажем про:
- Кабель-каналы DLP
- Емкость кабель-каналов
- Дизайн
- Удобство монтажа
- Особенности
И другая полезная информация по сисnемам кабельных каналов Legrand DLP.
Открыть
Кабель витая пара категории 5e
04
October
2013
Cat5e или 5е категория – кабель, использующийся для передачи сигналов в СКС, предназначенных для компьютерных сетей, таких, как Ethernet, а также для телефонии и передачи видеосигналов в полосе частот до 100 МГц.
Открыть
Рекомендуемые товары
IEK DRV056-A4-000-1-1510 Электродвигатель АИР DRIVE 3ф 56A4 380В 0.12кВт 1500об/мин 1081
IEK DRV056-A4-000-1-1510 Электродвигатель АИР DRIVE 3ф 56A4 380В 0.12кВт 1500об/мин 1081
Артикул: DRV056-A4-000-1-1510
Цена: 7 392,23 ₽
От 25 000 ₽ 7 392,23 ₽
От 100 000 ₽ 7 392,23 ₽
IEK DRV071-A8-000-2-0720 Электродвигатель АИР DRIVE 3ф 71A8 380В 0.18кВт 750об/мин 2081
IEK DRV071-A8-000-2-0720 Электродвигатель АИР DRIVE 3ф 71A8 380В 0. 18кВт 750об/мин 2081
Артикул: DRV071-A8-000-2-0720
Цена: 12 803,72 ₽
От 25 000 ₽ 12 803,72 ₽
От 100 000 ₽ 12 803,72 ₽
IEK DRV112-M4-005-5-1520 Электродвигатель АИР DRIVE 3ф 112M4 380В 5.5кВт 1500об/мин 2081
IEK DRV112-M4-005-5-1520 Электродвигатель АИР DRIVE 3ф 112M4 380В 5.5кВт 1500об/мин 2081
Артикул: DRV112-M4-005-5-1520
Цена: 41 180,65 ₽
От 25 000 ₽ 41 180,65 ₽
От 100 000 ₽ 41 180,65 ₽
устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТУ каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмоткамиРисунок 4. Якорь со многими обмоткамиПодобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якоремКоллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлениемБлагодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Принцип работы электродвигателя
В настоящее время существует множество устройств, способных преобразовывать различные виды энергии. Среди них ведущее место занимают различные типы электродвигателей, преобразующих энергию электрического тока во вращательное движение вала. Механизмы с электродвигателями получили широкое распространение в промышленности и в быту. Для того чтобы наиболее эффективно использовать эти устройства, необходимо понимать принцип работы электродвигателя.
Содержание
Как устроен классический электродвигатель
Каждый такой агрегат по своей сути является своеобразной технико-механической системой, с основной функцией, направленной на трансформацию электрической энергии во вращательное движение вала. Физическое действие двигателей основано на всем известном явлении электромагнитной индукции. В состав электромотора входят статор и ротор, которые соответственно являются неподвижной и движущейся частью.
В стандартных двигателях статор служит их наружной оболочкой, где происходит формирование неподвижных полей, обладающих магнитными свойствами. Роторная конструкция помещается внутри статора. Она включает в себя определенное число постоянных магнитов, сердечник в виде обмоток из проволоки, коллектор и щетки. Ток проходит по этим обмоткам, изготовленным из проводников, расположенных в виде многочисленных витков.
Когда электрический мотор, в том числе и с короткозамкнутым ротором, присоединяется к источнику питания, статорные и роторные поля начинают взаимодействовать между собой. Это приводит к возникновению момента вращения, вызывающего движение роторного вала агрегата. В свою очередь, энергия вращающегося вала подается к рабочему органу всего технического устройства, составной частью которого является тот или иной двигатель.
В процессе преобразования электричества в механическое движение, возникают определенные энергетические потери. Это связано с силой трения, намагничиванием сердечников, нагревом проводниковых элементов и другими факторами. На КПД электродвигателя оказывает влияние даже сопротивление воздуха деталям, находящимся в движении.
Тем не менее, благодаря современным технологиям, коэффициент полезного действия агрегатов нового поколения может доходить до 90%. Кроме того, эти устройства отличаются экологической чистотой и высокими эксплуатационными характеристиками.
Основные типы электродвигателей
Существуют различные типы и модификации электрических двигателей, отличающихся типом питания, напряжением, пределом мощности, количеством оборотов в минуту. Они могут быть с фазным или с короткозамкнутым ротором. Эти показатели считаются основными, однако во многих случаях особое значение придается размерам и массе, а также энергетическим показателям.
Классификация основных типов электродвигателей выглядит следующим образом:
- Электродвигатели постоянного тока. Устанавливаются в электроприводах с возможностью регулировок, где требуются высокие эксплуатационные и динамические показатели. Они обеспечивают максимально равномерное вращение и обладают способностью к перезагрузке. Чаще всего устанавливаются на всех видах транспорта, работающих от электрического тока.
- Агрегаты переменного тока трёхфазные. Получили более широкое применение в сравнении с прочими устройствами. Они обладают более простой конструкцией, несложные в эксплуатации, надежны и дешевы в производстве. Представители этого типа двигателей используется практически во всей бытовой технике, а также в промышленности, сельском хозяйстве и других областях.
- Синхронный двигатель. Ротор совершает обороты с такой же самой частотой, какая имеется у магнитного поля, образованного в воздушной прослойке. Синхронные моторы функционируют на постоянной и стабильной скорости, поэтому они устанавливаются в вентиляционном и насосном оборудовании, компрессорных установках и генераторах, вырабатывающих постоянный ток.
- Асинхронный электродвигатель в том числе и с короткозамкнутым ротором. Вращение ротора и магнитного поля происходит с различными частотами. Их конструкция предусматривает использование фазного или короткозамкнутого ротора.
- Серводвигатели. Считаются наиболее высокотехнологичными устройствами, работающими на постоянном токе. В основе их функционирования лежат отрицательные обратные связи. Вращение вала регулируется через компьютер, а мощности вполне достаточно для развития нужной скорости.
- Электрические моторы шагового типа. Принцип действия состоит в преобразовании электронных импульсов в дискретное (прерывистое) движение. Нашли широкое применение в компьютерах и прочей оргтехнике. Несмотря на малые размеры, обладают высокой продуктивностью.
Особенности работы электромоторов постоянного тока
Основной действующий принцип работы электродвигателя постоянного тока состоит в следующих процессах. К обмотке возбуждения, называемой также индукторной обмоткой, осуществляется подача постоянного тока. В результате, создается постоянное магнитное поле, используемое для возбуждения. В моторах с использованием постоянных магнитов, создание поля происходит под их воздействием.
Поступление постоянного тока происходит и в якорную обмотку. Здесь он попадает под влияние магнитного поля, созданного статором, создавая момент вращения. В результате такого воздействия, ротор совершает поворот на 90 градусов, затем его обмотки вновь коммутируются и вращающиеся движения продолжаются.
Двигатели, работающие на постоянном токе классифицируются в соответствии со способом возбуждения:
- Независимое возбуждение. Обмотка возбуждения запитывается через независимый источник.
- Параллельное возбуждение. Обмотка возбуждения в этом случае включается одновременно с питанием якорной обмотки.
- Последовательное возбуждение. Включение обмотки возбуждения последовательно с якорной обмоткой.
- Возбуждение смешанного типа. Такие двигатели оборудуются параллельной и последовательной обмотками.
Устройство и принцип работы мотора постоянного тока зависит от многих факторов. Если подключение выполнено напрямую, то во время пуска якорный ток многократно превышает номинальное значение. Для выравнивания этих величин в цепь с якорем устанавливается пусковое сопротивление, выполненное в виде реостата. Плавность в время пуска обеспечивается ступенчатой конструкцией этого устройства. На первом этапе оказываются включены все ступени и сопротивление достигает максимального значения.
По мере того как двигатель разгоняется, возникает сила, противоположная ЭДС. Она постепенно возрастает, а якорный ток снижается за счет последовательного выключения ступеней. Подача электроэнергии на якорь и обмотки возбуждения может быть отрегулирована тиристорными преобразователями, известными как приводы постоянного тока.
Принцип работы электродвигателя переменного тока
Основным отличием этих агрегатов от других устройств считается возможность трансформации электрической энергии в механическую и обратно. Вращательное движение вызывают взаимодействующие магнитные поля. Одно из них относится к категории динамического или вращающегося, а другое считается статическим или постоянным, статическим. В результате их взаимодействия, вал электродвигателя начинает вращаться.
На каждом статоре электромотора наматываются обмотки в количестве трех. К каждой из них соответственно подключаются три фазы. Трехфазный ток характеризуется плавно изменяющимися параметрами напряжения и тока, течение которых имеет вид синусоидального графика. Максимальная мощность в обмотке плавно перетекает из одной ее точки в другую. На концах синусоиды, расположенных на максимальном удалении, значение этой мощности будет наименьшим.
Когда напряжение с трех фаз подается к обмоткам статора, это приводит к образованию магнитного поля, вращающегося с такой же частотой, как и в сети, то есть, 50 Гц. Внутри статора расположен ротор, в котором также образуется магнитное поле. Оно отталкивается от поля статора и создает момент вращения. В общих чертах это принцип работы большинства аналогичных технических устройств.
Как действуют асинхронные электромоторы
Среди всех агрегатов переменного тока, чаще всего во многих сферах используются асинхронные двигатели трехфазного тока. Общий принцип работы асинхронного мотора очень простой и будет рассмотрен ниже. Их количество составляет примерно 90% от всех выпускаемых изделий этого типа. Данные устройства широко используются в промышленности, на транспорте, в сельском хозяйстве и многих других областях.
Агрегаты асинхронного типа также, как и другие, выпускаются и используются для трансформации переменного тока в механическую работу вала. Если объяснять по-простому, для чайников, понятие асинхронный возникло из-за разницы, возникающей между частотами, с которыми вращаются магнитные поля статоров и роторов. Частота у статора во всех случаях превышает частоту вращения ротора.
Конструкция асинхронного двигателя
В конструкцию асинхронного электродвигателя входят две основные детали – статор и ротор.
Для изготовления статора используются стальные листы, а сам он имеет форму цилиндра. В пазы конструкции укладываются обмотки из медных проводников. Их оси сдвинуты в пространстве относительно друг друга на 120 градусов. Соединение между собой концов каждой обмотки осуществляется по разным вариантам – в виде звезды или треугольником.
Роторные части асинхронных моторов изготавливаются в двух вариантах. В первом случае это изделия с короткозамкнутым ротором, собираемым в форме сердечника из стальных пластинок. В его пазы заливается алюминий в расплавленном виде, что приводит к образованию стержней, коротко замкнутых с торцевыми кольцами. В агрегатах повышенной мощности алюминиевый расплав по технологии заменяется медью.
Второй вариант представляет собой фазный ротор, имеющий такую же трехфазную обмотку, аналогичную обмотке у статора. Как правило, соединение обмоток в этом случае осуществляется звездой, а их свободные концы соединяются с контактными кольцами. Эти же кольца соединяются со щетками, обеспечивающими использование добавочного резистора. Данный элемент уменьшает слишком высокое значение пусковых токов.
Когда к обмотке трехфазного статора подается напряжение, во всех фазах возникает магнитный поток, изменяющийся с такой же частотой, как и в поступающем напряжении. У всех магнитных потоков имеется сдвиг на 120 градусов по отношению друг к другу. В результате образуется общий магнитный поток, который и обеспечивает собственное вращение. Он оказывает влияние на проводники роторных обмоток и создает в них ЭДС.
Принцип работы электродвигателя — HiSoUR История культуры — Hi So You Are
Электродвигатель — это электромеханический преобразователь (электрическая машина), который преобразует электрическую энергию в механическую. В обычных электродвигателях катушки токонесущих проводников генерируют магнитные поля, силы взаимного притяжения и отталкивания которых реализуются в движении. Таким образом, электродвигатель является аналогом очень похожего по конструкции генератора, который преобразует мощность двигателя в электрическую энергию. Электродвигатели обычно генерируют вращательные движения, но их также можно использовать для создания поступательных движений (линейный привод). Электродвигатели используются для привода многих устройств, машин и транспортных средств.
Принцип работы
Электродвигатели — это устройства, преобразующие электрическую энергию в механическую. Средством такого преобразования энергии в электродвигателях является магнитное поле. Существуют различные типы электродвигателей, и каждый тип имеет различные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, вызывающих силу или крутящий момент двигателя.
Фундаментальный принцип заключается в том, что закон Лоренца описывает, как сила возникает в результате взаимодействия точечного электрического заряда q в электрическом и магнитном полях:
где:
q : точечный электрический заряд
E : электрическое поле
v : скорость частицы
B : плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
сила в этом случае определяется только зарядом q и электрическим полем Е. Именно кулоновская сила действует вдоль проводника, порождающего электрический поток, например, в катушках статора асинхронных машин или в роторе электродвигателей. двигатели постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью груза v. Эта сила перпендикулярна магнитному полю и направлению скорости Загрузка. Обычно в движении находится много грузов, поэтому удобно переписать выражение через плотность заряда Fv (сила на единицу объема):
Произведение, известное как плотность тока Дж (ампер на квадратный метр):
Тогда полученное выражение описывает силу, возникающую при взаимодействии тока с магнитным полем:
Это основной принцип, который объясняет, как силы возникают в электромеханических системах, таких как электродвигатели. Однако полное описание каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель — это, по сути, любой электродвигатель, который был «развернут» таким образом, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные или шаговые двигатели. Линейные двигатели обычно используются во многих американских горках, где быстрое движение безмоторного вагона контролируется рельсом. Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A эпохи 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y.
Электромагнетизм
Сила и крутящий момент
Фундаментальная цель подавляющего большинства электродвигателей в мире состоит в электромагнитном индуцировании относительного движения в воздушном зазоре между статором и ротором для создания полезного крутящего момента или линейной силы.
В соответствии с законом силы Лоренца сила проводника обмотки может быть определена просто как:
или, в более общем случае, для работы с проводниками любой геометрии:
В наиболее общих подходах к расчету сил в двигателях используются тензоры.
Мощность
Где об/мин — это частота вращения вала, а T — крутящий момент, выходная механическая мощность двигателя Pem определяется формулой,
в британских единицах, где T выражается в футо-фунтах,
(в лошадиных силах) и,
в единицах СИ с угловая скорость вала, выраженная в радианах в секунду, и T, выраженная в ньютон-метрах,
(ватт).
Для линейного двигателя с силой F, выраженной в ньютонах, и скоростью v, выраженной в метрах в секунду,
(ватт).
В асинхронном или асинхронном двигателе зависимость между скоростью двигателя и мощностью воздушного зазора без учета скин-эффекта определяется следующим образом: в роторе
с – проскальзывание двигателя; т. е. разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Обратная ЭДС
Поскольку обмотки якоря постоянного или универсального двигателя движутся в магнитном поле, в них возникает наведенное напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Противо-ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках. Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате получается более низкая противо-ЭДС, и от источника питания потребляется больше тока. Этот увеличенный ток обеспечивает дополнительный крутящий момент для балансировки новой нагрузки.
В машинах переменного тока иногда полезно учитывать наличие внутри машины источника противо-ЭДС; например, это вызывает особую озабоченность при близком регулировании скорости асинхронных двигателей на частотно-регулируемых приводах.
Потери
Потери двигателя в основном связаны с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также имеют место аэродинамические потери, особенно при наличии охлаждающих вентиляторов.
Потери также возникают при коммутации, искровых механических коммутаторах и электронных коммутаторах, а также рассеивают тепло.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую мощность:
,
где КПД преобразования энергии, электрическая входная мощность и механическая выходная мощность:
где входная мощность напряжение, входной ток, T выходной крутящий момент и выходная угловая скорость. Аналитически можно вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента срыва.
Различные регулирующие органы во многих странах ввели и внедрили законодательство, поощряющее производство и использование электродвигателей с более высоким КПД.
Коэффициент качества
Эрик Лейтуэйт предложил показатель для определения «качества» электродвигателя: и электрической цепи
— длины магнитной и электрической цепи
— магнитная проницаемость сердечника
— угловая частота, с которой работает двигатель
Из этого он показал, что наиболее эффективные двигатели, вероятно, имеют относительно большие магнитные полюса. Однако уравнение напрямую относится только к двигателям без постоянных магнитов.
Рабочие параметры
Крутящий момент типов двигателей
Все электромагнитные двигатели, включая упомянутые здесь типы, получают крутящий момент из векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. После того, как они будут установлены с помощью математического анализа с использованием FEA или других инструментов, крутящий момент может быть рассчитан как интеграл всех векторов силы, умноженный на радиус каждого вектора. Ток, протекающий по обмотке, создает поля, а для двигателя, использующего магнитный материал, поле не линейно пропорционально току. Это усложняет вычисления, но компьютер может выполнить многие необходимые расчеты.
Как только это будет сделано, соотношение тока к крутящему моменту можно использовать в качестве полезного параметра для выбора двигателя. Максимальный крутящий момент для двигателя будет зависеть от максимального тока, хотя обычно его можно использовать только до тех пор, пока тепловые соображения не станут приоритетными.
При оптимальном расчете в пределах заданного ограничения насыщения сердечника и заданного активного тока (т. е. тока крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. е. синхронной скорости) и плотности потока в воздушном зазоре электродвигатели или генераторы будут демонстрировать практически одинаковый максимальный непрерывный крутящий момент на валу (т. Е. Рабочий крутящий момент) в пределах заданной площади воздушного зазора с пазами обмотки и глубиной заднего сердечника, которая определяет физический размер электромагнитного сердечника. В некоторых приложениях требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность к скачкам крутящего момента сверх максимального рабочего крутящего момента значительно различается между категориями электродвигателей или генераторов.
Способность к вспышкам крутящего момента не следует путать со способностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределами расчетной частоты возбуждения. Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с управляемыми по току полями и поэтому не может быть достигнуто с двигателями с постоянными магнитами.
Электрические машины без топологии цепи трансформатора, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента, превышающие максимально расчетный крутящий момент, без насыщения магнитного сердечника и превращения любого увеличения тока в бесполезное. Кроме того, узел постоянного магнита СДПМ может быть непоправимо поврежден, если будут предприняты попытки броска крутящего момента, превышающего максимальный номинальный рабочий крутящий момент.
Электрические машины с топологией схемы трансформатора, такие как асинхронные машины, асинхронные электрические машины с двойным питанием и асинхронные или синхронные машины с двойным питанием с фазным ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, поскольку активный ток, индуцированный ЭДС по обе стороны трансформатора противостоят друг другу и, таким образом, не вносят никакого вклада в плотность потока магнитного сердечника, связанного с трансформатором, что в противном случае привело бы к насыщению сердечника.
Электрические машины, работающие на индукционных или асинхронных принципах, закорачивают один порт цепи трансформатора, в результате чего реактивное сопротивление цепи трансформатора становится преобладающим по мере увеличения скольжения, что ограничивает величину активного (т. е. действительного) тока . Тем не менее, возможны всплески крутящего момента, в два-три раза превышающие максимальный расчетный крутящий момент.
Бесщеточная синхронная машина с двойным питанием и фазным ротором (BWRSDF) — единственная электрическая машина с действительно двухпортовой топологией схемы трансформатора (т. е. оба порта возбуждаются независимо, без короткозамкнутого порта). Известно, что топология схемы трансформатора с двумя портами нестабильна и требует сборки многофазного токосъемного кольца и щетки для передачи ограниченной мощности на набор обмоток ротора. Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжением для синхронной работы во время работы двигателя или генерации, одновременно обеспечивая бесщеточную мощность для набора обмоток ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления цепи трансформатора и возможны всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и выходящие далеко за пределы практических возможностей любого другого типа электрической машины. Были рассчитаны скачки крутящего момента, превышающие восьмикратный рабочий крутящий момент.
Непрерывная плотность крутящего момента
Непрерывная плотность крутящего момента обычных электрических машин определяется размером площади воздушного зазора и глубиной сердечника, которые определяются номинальной мощностью набора обмоток якоря, скоростью машины , и достижимая плотность потока в воздушном зазоре до насыщения сердечника. Несмотря на высокую коэрцитивную силу неодимовых или самариево-кобальтовых постоянных магнитов, плотность непрерывного крутящего момента практически одинакова среди электрических машин с оптимально спроектированными наборами обмоток якоря. Постоянная плотность крутящего момента зависит от способа охлаждения и допустимого периода работы до разрушения из-за перегрева обмоток или повреждения постоянного магнита.
Другие источники утверждают, что различные топологии электронных машин имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм/кг) |
|---|---|
| SPM — бесщеточный, переменный ток, проводимость тока 180° | 1,0 |
| SPM — бесщеточный, переменный ток, проводимость тока 120° | 0,9-1,15 |
| АД, асинхронная машина | 0,7-1,0 |
| IPM, внутренняя машина с постоянными магнитами | 0,6-0,8 |
| VRM, рефлекторная машина двойного действия | 0,7-1,0 |
где — удельная плотность крутящего момента приведена к 1,0 для СЗМ — бесщеточный переменный ток, проводимость тока 180°, СЗМ — машина с поверхностными постоянными магнитами.
Плотность крутящего момента примерно в четыре раза больше у электродвигателей с жидкостным охлаждением по сравнению с двигателями с воздушным охлаждением.
Источник, сравнивающий двигатели постоянного тока (DC), асинхронные двигатели (IM), синхронные двигатели с постоянными магнитами (PMSM) и вентильные реактивные двигатели (SRM), показал:
| Характеристика | постоянный ток | ИМ | ПСММ | СРМ |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Плотность мощности | 3 | 4 | 5 | 3,5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами мощностью до 1 МВт имеют значительно более высокую плотность крутящего момента, чем асинхронные машины.
Непрерывная удельная мощность
Непрерывная удельная мощность определяется произведением непрерывной плотности крутящего момента и диапазона скоростей постоянного крутящего момента электрической машины.
Специальные магнитные двигатели
Вращающиеся
Двигатель с ротором без железа или без сердечника
Принцип действия любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались. Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта заключается в двигателе постоянного тока без сердечника или железа, специальной форме двигателя постоянного тока с постоянными магнитами. Эти двигатели, оптимизированные для быстрого ускорения, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра или самонесущей конструкции, состоящей только из магнитной проволоки и связующего материала. Ротор может поместиться внутри магнитов статора; магнитомягкий стационарный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во втором варианте корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, образованный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее одной мс. Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая действовала бы как радиатор, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника. Современное программное обеспечение, такое как Motor-CAD, может помочь повысить тепловую эффективность двигателей еще на стадии проектирования.
Среди этих типов есть типы с дисковым ротором, более подробно описанные в следующем разделе.
Вибрационный сигнал сотовых телефонов иногда генерируется крошечными цилиндрическими типами полей с постоянными магнитами, но существуют также типы в форме дисков, которые имеют тонкий мультиполярный дисковый магнит и преднамеренно несбалансированную конструкцию ротора из формованного пластика с двумя связанными без сердечника катушки. Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и имеют связанную катушку, расположенную между полюсами тонких постоянных магнитов с высоким магнитным потоком. Это быстрые позиционеры головок для жестких дисков («жестких дисков»). Хотя современная конструкция значительно отличается от конструкции громкоговорителей, ее до сих пор вольно (и неправильно) называют структурой «звуковой катушки», потому что некоторые более ранние головки с жесткими дисками двигались по прямым линиям и имели структуру привода, очень похожую на что из громкоговорителя.
Блинчатый или осевой роторный двигатель
Печатный якорь или блинчатый двигатель имеют обмотки в форме диска, проходящего между массивами магнитов с высоким магнитным потоком. Магниты расположены по кругу, обращенному к ротору, с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как двигатель-блинчик из-за ее плоского профиля. С момента своего появления у этой технологии было много торговых марок, таких как ServoDisc.
Печатный якорь (первоначально сформированный на печатной плате) в двигателе с печатным якорем изготавливается из перфорированных медных листов, которые ламинируются вместе с использованием передовых композитов для образования тонкого жесткого диска. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку он не имеет отдельного кольцевого коммутатора. Щетки движутся непосредственно по поверхности арматуры, что делает всю конструкцию очень компактной.
Альтернативным методом изготовления является использование намотанной медной проволоки, уложенной плоско с центральным обычным коммутатором в форме цветка и лепестка. Обмотки обычно стабилизируются электрическими системами заливки эпоксидной смолой. Это наполненные эпоксидные смолы с умеренной смешанной вязкостью и длительным временем гелеобразования. Они выделяются низкой усадкой и низким экзотермическим эффектом и обычно признаются UL 1446 как герметик с изоляцией до 180 ° C, рейтинг класса H.
Уникальным преимуществом двигателей постоянного тока без сердечника является отсутствие заедания (изменения крутящего момента, вызванные изменением силы притяжения между железом и магнитами). В роторе не могут образовываться паразитные вихревые токи, так как он полностью безжелезный, хотя железные роторы ламинированы. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую скорость переключения (> 40 кГц) или постоянный ток из-за снижения электромагнитной индукции.
Первоначально эти двигатели были изобретены для привода шпилей магнитных ленточных накопителей, где критически важными были минимальное время для достижения рабочей скорости и минимальный тормозной путь. Блинчатые двигатели широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Из-за разнообразия конструкций, доступных в настоящее время, технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) заключается в использовании одного статора, помещенного между двумя роторами. Одна такая конструкция обеспечивает пиковую мощность 15 кВт/кг, устойчивую мощность около 7,5 кВт/кг. Этот двигатель с осевым магнитным потоком без ярма предлагает более короткий путь магнитного потока, удерживая магниты дальше от оси. Конструкция позволяет иметь нулевой выступ обмотки; 100 процентов обмоток активны. Это усиливается за счет использования медного провода прямоугольного сечения. Двигатели могут быть соединены друг с другом для параллельной работы. Нестабильность сводится к минимуму за счет того, что два диска ротора прилагают равные и противоположные силы к диску статора. Роторы соединены непосредственно друг с другом через кольцо вала, компенсируя магнитные силы.
Двигатели Magnax имеют диаметр от 15 до 5,4 метра (от 5,9 до 17 футов 8,6 дюйма).
Серводвигатель
Серводвигатель — это двигатель, очень часто продаваемый в виде законченного модуля, который используется в системе управления положением или скоростью с обратной связью. Серводвигатели используются в таких приложениях, как станки, плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и имеет большое значение для серводвигателя. Динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора, также важны; эти факторы ограничивают общую производительность контура сервомеханизма. В больших, мощных, но медленно реагирующих контурах сервопривода могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости двигателя. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходные характеристики плотности мощности и ускорения двигателей переменного тока по сравнению с двигателями постоянного тока, как правило, отдают предпочтение синхронным приводам с постоянными магнитами, BLDC, индукционным и SRM-приводам.
Сервосистема отличается от некоторых приложений с шаговым двигателем тем, что обратная связь по положению непрерывна во время работы двигателя. Шаговая система по своей сути работает с разомкнутым контуром, полагаясь на то, что двигатель не «пропускает шаги» для краткосрочной точности, а любая обратная связь, такая как «домой» переключатель или энкодер положения, является внешней по отношению к системе двигателя. Например, когда типичный матричный компьютерный принтер запускается, его контроллер заставляет шаговый двигатель печатающей головки двигаться до его левого предела, где датчик положения определяет исходное положение и прекращает шаг. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговые двигатели часто используются, когда требуется точное вращение. В шаговом двигателе внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явно выраженными полюсами управляется набором внешних магнитов, которые переключаются электронным способом. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку на каждую катушку по очереди подается питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается, а затем снова быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и обесточиваются. В зависимости от последовательности ротор может вращаться вперед или назад, а также в любое время произвольно менять направление, останавливаться, ускоряться или замедляться.
Простые драйверы шаговых двигателей полностью запитывают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому» ограниченному числу положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками зубчатых колес и, таким образом, вращаться очень плавно. Этот режим работы часто называют микрошагом. Шаговые двигатели, управляемые компьютером, являются одной из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигатели можно легко поворачивать на определенный угол дискретными шагами, поэтому шаговые двигатели используются для позиционирования головок чтения/записи в компьютерных дисководах для гибких дисков. Они использовались с той же целью в компьютерных дисководах до гигабайтной эры, где предлагаемая ими точность и скорость были достаточными для правильного позиционирования головки чтения / записи жесткого диска. По мере увеличения плотности дисков ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными — поэтому в новых жестких дисках используются системы привода головки на основе звуковой катушки. (Термин «звуковая катушка» в этой связи является историческим; он относится к структуре типичного (конического) громкоговорителя. Эта конструкция некоторое время использовалась для позиционирования головок. Современные приводы имеют поворотное крепление катушки; катушка качается. вперед-назад, что-то вроде лопасти вращающегося вентилятора. Тем не менее, подобно звуковой катушке, проводники катушки современного исполнительного механизма (магнитопровод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигатели использовались и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (матричных и струйных принтеров), валика или подающих роликов. Точно так же многие компьютерные плоттеры (которые с начала 1990-х годов были заменены широкоформатными струйными и лазерными принтерами) использовали роторные шаговые двигатели для движения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с обратной связью.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; они имеют одну катушку, потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
Тесно связанные по конструкции с трехфазными синхронными двигателями переменного тока, шаговые двигатели и SRM классифицируются как двигатель с переменным сопротивлением. Шаговые двигатели использовались и до сих пор часто используются в компьютерных принтерах, оптических сканерах и станках с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резаки и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями на основе катушек. Обычно им требуется источник питания высокого напряжения, хотя очень маленькие двигатели используют более низкое напряжение. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют высокого тока при низком напряжении. В 1750-х годах Бенджамином Франклином и Эндрю Гордоном были разработаны первые электростатические двигатели. Сегодня электростатический двигатель находит частое применение в микроэлектромеханических системах (МЭМС), где их управляющие напряжения ниже 100 вольт, а движущиеся заряженные пластины изготовить гораздо проще, чем катушки и железные сердечники. Кроме того, молекулярный механизм, управляющий живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезодвигатель представляет собой тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля. Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для последовательного растяжения и удержания положения, подобно тому, как движется гусеница.
Двигательная установка космического корабля с электрическим приводом использует технологию электродвигателя для движения космического корабля в космическом пространстве, большинство систем основано на электрическом питании ракетного топлива до высокой скорости, а некоторые системы основаны на принципах электродинамических тросов движения к магнитосфере.
Источник из Википедии
Электродвигатель — принцип, работа, схема Это вращающееся устройство (устройство, которое вращается или перемещается по кругу)
Он преобразует электрическую энергию в механическую энергию
Они используются в электрических вентиляторах, холодильниках, стиральных машинах, миксерах и т. д.
вот как это выглядит
Принцип работы электродвигателяЭлектродвигатель работает по принципу
когда прямоугольную катушку помещают в магнитное поле и через нее пропускают ток,
на катушку действует сила, которая непрерывно вращает ее
Конструкция электродвигателяЭлектродвигатель состоит из
- Прямоугольная катушка провода ABCD
- А сильный подковообразный магнит (или 2 разных магнита) — Если мы возьмем 2 магнита, северный полюс первого магнита обращен к южному полюсу другого магнита, как показано на рисунке. ..
- катушка расположена перпендикулярно магниту как показано на рисунке
- Концы катушки соединены с разрезные кольца — П и В
Разрезные кольца действуют как коммутатор — который меняет направление тока в цепи - Внутренняя сторона разрезных колец 903:00 изолированы и прикреплены к оси (который может свободно вращаться)
- Внешние токопроводящие кромки разъемных колец жесткие два стационарные щетки — X и Y
- Эти щетки крепятся к батарея чтобы завершить цепь
Давайте посмотрим на работу электродвигателя.
- Когда батарея включена, ток течет через катушку АВ от А к В,
и магнитное поле с севера на юг…
Итак, по правилу левой руки Флеминга к АВ приложена направленная вниз сила.Точно так же восходящая сила применяется к компакт-диску.
Таким образом, катушка вращается, при этом AB движется вниз, а CD вверх - Теперь катушки AB и CD меняются местами,
Так как ток течет от C к D, а магнитное поле от севера к югу
CD получит восходящую силу и двинется вверхАналогично, AB будет двигаться вниз
Итак, наша катушка сделала бы половину оборота - Но, мы не хотим половинчатых оборотов,
Нам нужен полный оборот катушки. - Итак, для этого мы изменим направление тока в катушке, когда она сделает половину оборота.
- Чтобы изменить направление тока, мы используем коммутатор.
Коллектор состоит из разрезных колец (двух колец с промежутком между ними) и щеток, прикрепленных к цепи. - Теперь, когда катушка вращается, кольца вращаются вместе с ней.
Когда катушка становится параллельной магнитному полю,
щетки X и Y касаются зазора между кольцами
и цепь разрывается - Теперь из-за инерции кольцо продолжает двигаться. .. так что противоположный конец кольца теперь соединен с положительным концом провода.
Разрезное кольцо P соединяется с катушкой CD, а разрезное кольцо Q соединяется с катушкой AB.
Меняет направление тока в цепи. - Теперь, когда CD находится слева, а AB справа..
Ток в CD становится обратным, то есть с D на C.
Итак, сила на CD направлена вниз, а сила на AB направлена вверх
Таким образом, катушка продолжает вращаться - Это реверсирование электрического тока происходит каждые пол-оборота.
и катушка продолжает вращаться до тех пор, пока батарея не будет отключена
Примечание — Если бы разрезное кольцо не использовалось, катушка вращалась бы наполовину по часовой стрелке и наполовину против часовой стрелки.
Следовательно, цель разъемного кольца состоит в том, чтобы изменить направление тока и заставить катушку вращаться в одном направлении.
Чтобы написать «Работа электродвигателя» в экзаменационной работе, отметьте — NCERT Вопрос 11
Как коммерческие электродвигатели увеличивают производимую мощность и мощность двигателей?
Они увеличивают производимую силу и мощность двигателей на
- Использование электромагнита вместо постоянного магнита
- Большое количество витков проводящего провода (чем больше витков в проводе, тем больше магнитное поле)
- Сердечник из мягкого железа, на котором намотана катушка
Примечание : Сердечник из мягкого железа, на который намотана катушка вместе с витками, называется арматура .
Увеличивает мощность двигателя.
Примечание : Для тебя Экзамены,
пожалуйста, напишите принцип, работа, конструкция электродвигателя.
И не забудьте сделать первую цифру (та, что указана в NCERT)
Вопросы
NCERT Вопрос 3 — Устройство, используемое для получения электрического тока, называется
- генератор.
- гальванометр.
- амперметр.
- мотор.
Посмотреть ответ
NCERT Вопрос 6 (а) — Укажите, верны или нет следующие утверждения.
а) Электрический двигатель преобразует механическую энергию в электрическую.
Посмотреть ответ
NCERT Вопрос 11 — Нарисуйте маркированную схему электродвигателя. Объясните его принцип и работу. Какова функция разрезного кольца в электродвигателе?
Посмотреть ответ
NCERT Вопрос 12 — Назовите некоторые устройства, в которых используются электрические двигатели.
Посмотреть ответ
Вопросы 2 Страница 233 — Каков принцип работы электродвигателя?
Посмотреть ответ
Вопросы 3 Страница 233 — Какова роль разрезного кольца в электродвигателе?
Посмотреть ответ
Решите все свои сомнения с Teachoo Black (новый месячный пакет уже доступен!)
Присоединяйтесь к Teachoo Black
Принцип работы электродвигателя
В настоящее время электродвигатели можно встретить в жизни каждого, поскольку они преобразуют электрическую энергию в механической или кинетической энергии. Эклектичные двигатели доступны в электромобилях (EV), вентиляторах, часах, миксерах, кофемолках, стиральных машинах и многих других устройствах. Следовательно, знание принципов работы двигателя может помочь каждому более эффективно использовать моторное оборудование. В этой статье принцип электродвигателя обсуждается. Затем представлены различные распространенные типы электродвигателей, включая двигатели постоянного тока, асинхронные двигатели и, наконец, синхронные двигатели.
Электродвигатели работают на основе магнитного поля. Магнитное поле может создаваться магнитом или обмотками вокруг магнитного сердечника. Чтобы начать теорию, объясняется магнитная сила провода с током, который подвергается воздействию магнитного поля. Магнит создает магнитное поле между полюсами N и S, как показано на рисунке 1. Линии магнитного поля выходят из полюса N и входят в полюс S. Это магнитное поле является постоянным, и в магнитном поле нет колебаний, которые могут выглядеть как постоянное магнитное поле.
Рисунок 1: Магнитное поле между северным и южным полюсами магнита
Когда проводник с током входит в магнитное поле, к проводу прикладывается магнитная сила, которая заставляет провод двигаться. Величина силы зависит от некоторых параметров, которые обсуждаются в этой статье. Первым параметром, влияющим на магнитную силу, является ток, протекающий по проводу. Если ток через ток равен нулю, силы на провод не будет, а сила имеет прямую связь с током. Следовательно, можно написать следующее уравнение.
(1)
где F — магнитная сила, а I — сила тока в проводе. Еще одним параметром является длина провода, который видит магнитное поле. Зависимость между магнитной силой и длиной оголенного провода также является прямой и может быть записана как:
(2)
, где l — длина провода. Последним параметром является напряженность магнитного поля, которая имеет прямую зависимость от магнитной силы как:
(3)
Эти три параметра определяют максимальное значение магнитной силы, которое возникает, когда магнитное поле перпендикулярно проводу. Таким образом, любое отклонение от перпендикулярного положения уменьшает величину силы, прикладываемой к проволоке. Это означает, что магнитная сила на рисунке 2 не достигает своего максимального значения из-за угла между магнитным полем и током в проводнике.
Рисунок 2: Проводник с током среди магнитного поля, создаваемого магнитом
Учитывая все параметры, магнитная сила может быть рассчитана по данному уравнению.
(4)
Теперь вместо одного проводника можно рассматривать петлю между полюсами. Петля может быть любой формы, но для лучшего понимания предполагается, что петля представляет собой прямоугольник, как показано на рисунке 3. В этой ситуации каждая сторона петли несет ток и испытывает магнитную силу. Направление силы можно получить по правилу левой руки.
Рисунок 3. Близкий путь проводника в магнитном поле, создаваемом магнитом
текущее направление, и все эти пальцы перпендикулярны друг другу. Согласно уравнению 4, магнитная сила равна нулю, когда несущий ток параллелен магнитному полю. Таким образом, магнитная сила BC и AD равна нулю. В этом состоянии только AB и CD испытывают магнитную силу. Если применить правило левой руки к путям AB и CD, магнитная сила для пути AB будет направлена вверх, а для пути CD направление силы будет направлено вниз. Эти две противоположные силы вращают петлю, но она не может завершить свое вращение, потому что направление тока в петле постоянно. Это означает, что устойчивое положение петли — это когда петля перпендикулярна магнитному полю. В этом положении направленная вверх и вниз сила нейтрализует друг друга, и проволочная петля не может двигаться. Чтобы решить эту проблему, направление тока в петле должно соблюдаться в каждом полуобороте, чтобы позволить проволочной петле вращаться. Более того, инерция поможет петле продолжить свое вращение и пройти устойчивое положение.
Рисунок 4: Коммутатор и щетка для изменения направления тока в контуре на противоположное
Для достижения этой цели в схему необходимо добавить угольные щетки и коммутаторы. Поскольку провода батареи не могут вращаться вместе с петлей, две щетки действуют как мост для контакта петли с батареей. Кроме того, коммутаторы изменяют направление тока в петле, когда петля вращается в магнитном поле. Эти принципы относятся к двигателю постоянного тока, поскольку источник постоянного тока подключен к вращающейся части двигателя. Двигатели обычно имеют статическую часть, называемую статором, и подвижную часть, а именно ротор. Обе части состоят из магнитопровода и обмоток. В двигателе постоянного тока в статорной части используется магнит. Однако постоянное магнитное поле можно создать, обмотав провода вокруг статора и подключив клеммы к источнику постоянного напряжения. Кроме того, к коммутаторам подключено множество проволочных петель, чтобы увеличить мощность и помочь двигателю вращаться быстрее. В двигателях постоянного тока воздушный зазор между статором и ротором равномерный.
Теория двигателя переменного тока такая же. Значит, магнитное поле необходимо, и обмотки ротора вынуждены вращаться. Однако в двигателях переменного тока обмотки статора подключены к источнику переменного напряжения, и магниты не могут использоваться для статоров, поскольку магнитное поле, создаваемое магнитом, постоянно. Двигатели переменного тока подразделяются на две основные группы, включая асинхронные двигатели и синхронные двигатели, которые будут обсуждаться в следующих частях. Большинство двигателей в промышленности представляют собой трехфазные асинхронные двигатели, которые используются в вентиляторах, насосах и т. д. Однако однофазные асинхронные двигатели используются в бытовой технике, такой как холодильники, миксеры и т. д.
В асинхронных двигателях воздушный зазор неравномерный, сердечник статора ламинирован из-за потерь на вихревые потоки, на внешней поверхности прорезаны пазы. Трехфазные обмотки вставлены в пазы статора для создания магнитного поля переменного тока в воздушном зазоре. Существует два типа обмотки ротора, которые называются типами с короткозамкнутым ротором и фазным ротором. В асинхронных двигателях нет токонесущих обмоток, потому что вращающееся магнитное поле переменного тока изменяется со временем, и его изменение заставляет обмотки ротора вращаться в направлении магнитного поля. Магнитное поле переменного тока, создаваемое обмотками статора, вращается в воздушном зазоре с синхронной скоростью, но скорость вращения ротора меньше скорости поля в асинхронном двигателе.
В отличие от асинхронного двигателя синхронный двигатель может вращаться с постоянной скоростью в установившемся режиме. Следовательно, синхронные двигатели можно использовать там, где важна постоянная скорость, например, электрические часы, таймеры, или многие другие в больших масштабах можно использовать в качестве насосов. Однако синхронные машины используются в качестве генератора, а не двигателя. На электростанциях есть много синхронных генераторов, но синхронные двигатели имеют ограниченное применение. Структура статора синхронного двигателя аналогична асинхронным двигателям, но по обмотке ротора протекает постоянный ток.
Электродвигатели используются во многих отраслях промышленности. Например, электропоезда работают с двигателями постоянного тока и асинхронными двигателями. Кроме того, в электромобилях используются разные типы двигателей. В прошлом для этой цели широко использовались двигатели серии постоянного тока. В наши дни бесщеточный двигатель постоянного тока (BLDC) или синхронный двигатель с постоянными магнитами (PMSM) используются вместе с асинхронными двигателями. Двигатели даже используются в бытовой технике, такой как кофемолки, миксеры, блендеры, электрические зубные щетки и т. д. Другими распространенными областями применения являются компрессоры, корабли и лифты. В следующем разделе всесторонне представлены электродвигатели Tesla EV.
Tesla как пионер в области электромобилей использует различные типы электродвигателей для достижения более высокой эффективности и удовлетворения потребностей пользователей. Асинхронные двигатели в основном используются в электромобилях, но Tesla представляет новый двигатель для своих новых моделей. В этой статье определены принципы работы асинхронного двигателя, в котором ротор с короткозамкнутым ротором и статор подключены к источнику переменного напряжения. Поскольку основным источником энергии в электромобилях являются батареи, постоянное напряжение батареи преобразуется в переменное напряжение для питания асинхронного двигателя. Асинхронные двигатели эффективны, но от трех до четырех процентов энергии теряется в стержнях несущего винта при длительном движении на крейсерской скорости. Еще один параметр — пусковой крутящий момент, который необходимо повышать в электромобилях. Следовательно, двигатель должен быть улучшен, исходя из этой потребности. Ротор с короткозамкнутым ротором можно заменить постоянным магнитом вокруг сплошного железного цилиндра для создания постоянного магнитного поля в воздушном зазоре. Эта конструкция устраняет потери ротора в предыдущих двигателях, поскольку не требуется индуктивного тока, что повышает эффективность двигателя, и, кроме того, он имеет лучший пусковой момент по сравнению с асинхронным двигателем. Кроме того, ротор с постоянными магнитами работает как синхронный двигатель из-за постоянного магнитного поля, которое позволяет двигателю вращаться с синхронной скоростью. Однако двигатели с постоянными магнитами имеют некоторые ограничения. Они не могут работать на высокой скорости, потому что постоянный магнит создает противо-ЭДС в обмотках статора и значительно снижает его производительность. Кроме того, сильные магниты приводят к потерям магнитных вихревых токов, что увеличивает нагрев двигателя. Для повышения производительности в электромобилях могут использоваться синхронные реактивные двигатели. В этом типе двигателя внутри ротора созданы пазы. Поскольку ротор стремится к низкому магнитному сопротивлению, он сохраняет свое положение с низким магнитным сопротивлением и вращается вместе с магнитным полем. Эта конструкция приемлема для высокоскоростных приложений и не имеет обратной ЭДС. Новейший тип двигателя, который Tesla использует в своих электромобилях, представляет собой комбинацию двигателей с постоянными магнитами и реактивных двигателей, размещая их в слотах реактивных двигателей. Таким образом, двигатель может эффективно работать на любой скорости.
Как работает электродвигатель?
Электродвигатель помогает преобразовывать электрическую энергию в механическую. Он основан на принципах электромагнетизма.
Для работы многих устройств требуются вращающиеся детали. Одним из таких используемых устройств является электродвигатель. Электродвигатель представляет собой вращающееся устройство. Он играет роль в энергетике. преобразование. Теории электродвигателей изучаются в физике.
Электродвигатель является широко используемым инструментом. Он используется в повседневной жизни. Электродвигатель полезен для преобразования одного вида энергии в другой. Электрический двигатель используется в транспортных средствах, устройствах и т. д. Он работает по принципу электромагнетизм. Эта статья поможет вам понять работу, строительство, и т. д. электродвигателя.
Что такое электродвигатель?
Электродвигатель — это прибор, преобразующий энергию. Электродвигатель представляет собой тип вращающегося устройства. Он преобразует электрическую форму энергии в механическую. Он работает по принципу электромагнетизма. Он работает из-за взаимодействия между магнитным полем двигателя. Магнитное поле взаимодействует с электрическим током в проводах обмотки. Это взаимодействие создает силу в виде крутящего момента. Этот крутящий момент приложен к валу двигателя.
Для питания электродвигателя используется постоянный или переменный ток. Постоянный ток передается батареями или выпрямителями. Переменный ток передается инверторами, электрическими генераторами и электрическими сетями. Электродвигатели классифицируются на основе многих факторов. Например, тип источника питания, области применения и т. д.
Принцип работы электродвигателя
Каждый инструмент имеет свой принцип. Принцип описывает теорию, по которой работает прибор. Электродвигатель также имеет определенный принцип. Принцип работы электродвигателя заключается в том, что при пропускании тока через прямоугольную катушку, помещенную в магнитное поле, к катушке прикладывается сила. Эта сила отвечает за непрерывное вращение двигателя.
Благодаря этому вращению происходит преобразование энергии. Простыми словами, принцип работы электродвигателя переносится на проводник с током. Этот проводник с током создает магнитное поле. Этот проводник с током расположен перпендикулярно направлению магнитного поля. Благодаря этому он испытывает силу.
Конструкция электродвигателя
Каждое устройство имеет уникальную конструкцию. Необходимо понимание конструкции. Вот объяснение конструкции электродвигателя.
Конструкция электродвигателя
Он имеет прямоугольную катушку провода ABCD.
У него сильный подковообразный магнит. Катушка ABCD расположена перпендикулярно этому магниту.
Концы катушки ABCD соединены с разъемными кольцами P и Q. Эти разъемные кольца играют роль коммутатора. Это помогает изменить направление тока.
Внутренняя часть разрезных колец изолирована.
Он прикреплен к оси. Ось свободно вращается.Внешняя сторона токопроводящих кромок разрезных колец соединена со стационарными щетками. Эти щетки X и Y соединены с аккумулятором. Это завершает схему.
Это общая конструкция электродвигателя.
Детали электродвигателя
Электродвигатель состоит из множества частей. Эти детали необходимы для бесперебойной работы двигателя. Вот описание основных частей электродвигателя.
Части электродвигателя
Ротор: это движущаяся часть двигателя. Его роль заключается во вращении вала двигателя. Это вращение на валу производит механическую энергию. Ротарь также содержит проводник. По этому проводнику текут токи. Это также помогает в общении с магнитным полем, присутствующим в статоре.
Подшипники: Подшипники используются для поддержки вращателя. Это необходимо для активации оси ротора. С помощью них расширяется вал двигателя. Он распространяется до нагрузки двигателя.
Статор: это неактивная часть электромагнитной цепи двигателя. Он состоит из постоянного магнита и обмотки. Статор можно изготовить из тонких металлических листов. Их называют ламинатами. Они помогают уменьшить потери энергии.
Обмотки: Провода, проложенные внутри катушки электродвигателя, называются обмотками. Обычно они намотаны на гибкий железный магнитный сердечник. Это создает магнитные полюса при подаче тока.
Это были все важные части и их использование в электродвигателе.
Работа электродвигателя
Упомянутый электродвигатель представляет собой вращающееся устройство. Работа электродвигателя объясняет его механизм. Вот несколько шагов, которые объясняют работу электродвигателя.
Работа электродвигателя
Когда аккумулятор двигателя включен, в нем протекает ток. Ток течет через катушку AB от A к B. При этом направление магнитного поля с севера на юг. О правиле левой руки Флеминга сила действует вниз на AB.
Подобно этому восходящая сила применяется к CD. Благодаря этому катушка вращается. AB движется вниз, а CD движется вверх.
Теперь обе катушки AB и CD поменялись местами. Теперь поток тока идет от C к D. А направление магнитного поля — с севера на юг. Катушка CD получает направленную вверх силу и движется вверх. Катушка AB движется вниз. Таким образом, обе катушки делают половину оборота.
Электродвигателю для работы требуется полный оборот. Для этого направление тока меняется. Направление тока меняется с помощью коммутатора. Коммутатор имеет два разрезных кольца. Щетки также присоединены к его контуру.
Когда катушка начинает вращаться, кольца тоже вращаются. Как только катушка становится параллельной магнитному полю, щетки касаются зазора между кольцами. Из-за этого цепь разрывается.
Из-за инерции кольцо продолжает двигаться. Противоположный конец кольца подключается к положительному концу провода.
Разрезные кольца P и Q прикреплены к катушке CD и AB соответственно. Благодаря этому направление тока в цепи меняется на противоположное.
Катушка CD слева, катушка AB справа. Ток в катушке CD меняется на противоположный. Теперь ток течет от D к C. На AB действует восходящая сила, а на CD — направленная вниз сила. Это удерживает катушку во вращении.
Эта реверсия электрического тока происходит после каждого полуоборота. Это позволяет катушке вращаться до тех пор, пока батарея не будет отключена.
Это детальная работа электродвигателя.
Преимущества электродвигателя
Электродвигатель имеет множество преимуществ. Это лучше, чем другие устройства преобразования энергии. Есть много преимуществ использования электродвигателя. Вот некоторые из них:
Первоначальная стоимость электродвигателя довольно низкая. Это лучше, чем двигатели, использующие ископаемое топливо.
Электродвигатель имеет различные рабочие части.
За счет этого электродвигатель имеет более длительный срок службы.Двигатель требует меньше обслуживания. Электродвигатель имеет среднюю мощность 30 000 часов.
Электродвигатель имеет автоматическое управление. Он упрощает управление и имеет функции автоматического запуска и остановки. Кроме того, электрические двигатели очень эффективны.
Они не используют ископаемое топливо. Это потому, что им не нужно моторное масло.
Это различные преимущества электродвигателя. Благодаря этим преимуществам он является широко используемым инструментом для преобразования энергии.
Применение электродвигателя
Широко используется электродвигатель. Он получил много приложений. Эти приложения описывают использование электродвигателя. Электродвигатели являются неотъемлемой частью многих инструментов. Он имеет множество приложений. Некоторые из них:
Электродвигатель используется в воздуходувках, станках, электроинструментах, насосах и турбинах.
Он также используется во вращающихся устройствах, таких как компрессоры, прокатные станы, вентиляторы, корабли, двигатели и т. д.
Применение электродвигателя
Электродвигатель также является обязательным компонентом многих устройств. К ним относятся отопительное и охлаждающее оборудование, различная бытовая техника, а также автомобили.
Вот несколько вариантов применения электродвигателя.
Заключение:
Электродвигатель является широко используемым инструментом. Его основная цель — преобразование энергии. Он эффективен в преобразовании электрической энергии в механическую форму энергии. Его функционирование можно объяснить принципами электромагнетизма.
Имеет различные части и уникальные конструкции. Это дешевле и эффективнее любого другого преобразователя энергии. Он имеет широкий спектр применения. Габаритный электродвигатель представляет собой эффективное устройство.
Двигатель, который может работать как от источников переменного, так и от постоянного тока, называется универсальным двигателем.
Электродвигатели, демонстрирующие преобразование энергии переменного тока в механическую, называются двигателями переменного тока. А те, которые показывают преобразование энергии постоянного тока в механическую, называются двигателями постоянного тока.
Нет. В вакууме электродвигатель будет работать некоторое время, а затем остановится, потому что смазочные материалы и изоляционные материалы испарятся из-за низкого давления и вакуума, это явление называется дегазацией.
Что такое электродвигатель?
Электродвигатели представляют собой устройства, преобразующие электрическую энергию в механическую, обычно в форме вращательного движения. Проще говоря, это устройства, которые используют электроэнергию для выработки движущей силы.
Электродвигатели не только обеспечивают простое и эффективное средство создания высокой выходной мощности привода, но и их легко уменьшить, что позволяет встраивать их в другие машины и оборудование. В результате они находят широкое применение как в промышленности, так и в повседневной жизни.
Принцип работы
Помнишь, тебя в школе учили правилу левой руки Флеминга? Электродвигатели являются применением этого правила, при этом сила, создаваемая электрическим током, протекающим через катушку в присутствии магнитного поля, заставляет вал двигателя вращаться.
На приведенной ниже диаграмме правило левой руки Флеминга говорит нам, что направленная вверх сила генерируется, когда ток течет перпендикулярно магнитному полю от магнита * .
*
Магнитное поле: Область, в которой присутствует магнитная сила (направленная от северного (N) к южному (S) полюсу магнита).
Как достигается вращение в электродвигателе
В случае щеточного электродвигателя постоянного тока *1 , например, эту силу можно использовать для поддержания непрерывного вращения путем изменения направления тока на каждом полуобороте катушки (что достигается с помощью щеток и коммутатора *2 )
*1
Двигатель постоянного тока: Двигатель, работающий от постоянного тока (DC)
*2
Щетки и коллектор: При совместном использовании они меняют направление тока каждый раз, когда вал двигателя делает пол-оборота.
История электродвигателей
Британский ученый Майкл Фарадей пользуется особым влиянием среди многих ученых 19 века, сыгравших определенную роль в изобретении и разработке электродвигателей. В 1821 году Фарадей провел успешный эксперимент, в котором вращение проволоки осуществлялось с помощью магнита вместе с магнитным полем, создаваемым электрическим током. В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
Со временем было изобретено множество других типов электродвигателей, а также конструкции, которые можно считать архетипическими двигателями постоянного тока.
Впоследствии, в 1872 году, практический электродвигатель был не столько изобретен, сколько открыт, когда один из генераторов, выставленных на Всемирной выставке в Вене, начал вращаться сам по себе после того, как был случайно подключен к другому генератору. Это привело людей к пониманию того, что то, как работают генераторы, можно использовать и в двигателях. Последовавший за этим быстрый рост практического использования генераторов был таким, что они стали основой многих отраслей промышленности в 20 веке.
Двигатели и генераторы
В то время как электродвигатели преобразуют электрическую энергию во вращение и другие виды механической энергии, генераторы выполняют обратную функцию преобразования механической энергии в электрическую.
Несмотря на эти противоположные функции, двигатели и генераторы очень похожи по конструкции и принципу действия. Фактически, простой эксперимент, в котором два модельных двигателя соединяются вместе, — это все, что нужно, чтобы продемонстрировать, что электрический двигатель может также работать как генератор.
Естественно, учитывая различные способы их использования, два типа машин всегда разрабатывались отдельно.
Типы электродвигателей
Электродвигатели бывают самых разных форм в зависимости от типа используемого тока, конструкции их катушек (обмоток) и того, как они генерируют магнитное поле. Соответственно, их можно классифицировать по различным признакам.
Ниже описаны три типа электродвигателей, обычно используемых как в быту, так и в промышленности.
Двигатели постоянного тока
Это двигатели, приводимые в действие источником постоянного тока. Они подразделяются на щеточные и бесщеточные (BLDC) двигатели в зависимости от того, используют ли они щетки *1 .
В то время как коллекторным двигателям постоянного тока для работы требуется только подключение к источнику питания постоянного тока, бесщеточным двигателям постоянного тока требуется датчик для определения ориентации магнитных полюсов ротора *2 и схема привода для подачи соответствующего тока.
*1
Щетка: Деталь, используемая вместе с коллектором.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
Двигатели переменного тока
Это двигатели, приводимые в действие источником переменного тока. Они сгруппированы в зависимости от того, является ли источник питания однофазным *1 или трехфазным *2 .
Однофазные двигатели далее сгруппированы в конденсаторные двигатели, в которых используется конденсатор *3 для создания крутящего момента, и двигатели с расщепленными полюсами, которые имеют дополнительную катушку (обмотку), называемую экранирующей катушкой *4 .
*1
Однофазный: Обычный источник питания переменного тока, обычно доступный в домах.
*2
Трехфазный: тип источника питания переменного тока, используемый в основном в промышленности.
*3
Конденсатор: электронный компонент, хранящий электрическую энергию.
*4
Затеняющая катушка: катушка с замкнутой цепью, намотанная вокруг части сердечника статора.
Шаговые двигатели
Это двигатели, которые вращаются на фиксированный шаг (угол) каждый раз, когда вводится импульс *1 .
Шаговые двигатели можно сгруппировать по структуре их ротора. Двигатели с постоянными магнитами (PM) *2 имеют магнит в роторе *3 , двигатели с переменным сопротивлением (VR) *4 имеют железный сердечник, а гибридные двигатели имеют и то, и другое.
*1
Импульс: Короткий всплеск электричества, производимый включением и выключением источника питания.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
*3
Двигатель с постоянными магнитами: Двигатель с постоянным магнитом
.*4
ДвигательVR: двигатель с переменным магнитным сопротивлением, в котором сердечники расположены подобно зубьям шестерни, при этом такое расположение определяет угол шага.
Обзор типов электродвигателей
В таблице ниже перечислены основные характеристики трех различных типов двигателей.
В дополнение к перечисленным выше существует множество других типов электродвигателей.
| Тип | Характеристики |
|---|---|
| Линейный двигатель | Двигатель, скользящий в линейном направлении |
| Ультразвуковой двигатель | Двигатель, приводимый в движение ультразвуковыми колебаниями |
| Мотор без сердечника | Коллекторный двигатель постоянного тока с ротором без железного сердечника или бесщеточный двигатель со статором без железного сердечника |
| Универсальный двигатель | Двигатель с фазным ротором и фазным статором, работающий как на переменном, так и на постоянном токе |
| Двигатель с гистерезисом | Двигатель переменного тока, в роторе которого используется материал, обладающий гистерезисом и вращающийся за счет гистерезисного крутящего момента |
| Электродвигатель SR | Шаговый двигатель VR, который также имеет функцию определения положения ротора, что позволяет избежать потери синхронизации |
Применение двигателей
Хотя электродвигатели используются по-разному, ниже перечислены общие области применения бесщеточных двигателей постоянного тока и шаговых двигателей, поставляемых ASPINA.
Области применения бесщеточных двигателей постоянного тока
Благодаря небольшим размерам, высокой мощности, низкому уровню шума и вибрации, а также длительному сроку службы бесщеточные двигатели постоянного тока находят широкое применение в таких приложениях, как системы вентиляции (очистители воздуха и другие виды кондиционер), бытовая техника, холодильники, водонагреватели, торговые автоматы, копировальные аппараты, принтеры, проекторы, оргтехника, контрольно-измерительные приборы, транспортные средства и медицинские приборы.
- Кондиционеры
- Финансовые терминалы (банкоматы), разменные автоматы, автоматы по обмену валюты, автоматы по продаже билетов
- Бытовая техника
- Чистые помещения
- Водонагреватели и горелки
- Оптические изделия
- Торговые автоматы
- Принтеры
- Морозильные и холодильные витрины
- Копировальные аппараты
- Медицинское оборудование
- Офисное оборудование
- Системы лабораторного анализа
Области применения шаговых двигателей
Превосходная точность остановки, высокий крутящий момент на средних и низких скоростях и превосходная чувствительность шаговых двигателей означают, что они могут использоваться в широком диапазоне приводных устройств, требующих точного управления.
- Производственное оборудование
- Приводы оптических дисков (приводы Blu-ray, DVD и т. д.)
- Медицинское оборудование
- Лазерные принтеры
- Лабораторные аналитические приборы
- Цифровые камеры
- Банкоматы
- Жалюзи кондиционера
- Торговые автоматы
- Развлекательные автоматы
- Автоматы по продаже билетов
- Копировальные аппараты
- Роботы
Решение проблем с электродвигателями
ASPINA поставляет не только автономные шаговые двигатели, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки.
Вы боретесь со следующими проблемами?
Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но вам нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
Разработка двигателей и связанных с ними компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей на стороне?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
Уникальное требование
- Нужен специальный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, который дает вам требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Принцип работы двигателя переменного тока с основными сведениями и конструкцией
Принцип работы двигателя переменного тока основан на простых принципах магнетизма. Но прежде чем подробно обсуждать принцип работы двигателя переменного тока, давайте разберемся с основами. АС — это аббревиатура от 9.0300 Переменный ток . В то время как постоянный или постоянный ток остается постоянным во времени, переменный ток периодически меняет свое направление.
Разница между переменным током и постоянным током:
Профиль напряжения постоянного тока показан на рисунке ниже. Посмотрите, как величина напряжения остается постоянной с течением времени. Для работы генератора постоянного тока и двигателя постоянного тока требуется такое напряжение.
Форма сигнала напряжения постоянного тока
Ниже приведен профиль напряжения переменного тока.
Один полный цикл источника переменного тока
- В источнике переменного тока двигателя переменного тока величина напряжения начинается с нуля, увеличивается до максимального значения, а затем начинает уменьшаться, пока снова не достигнет нуля. Он совершает полупериод и известен как положительный полупериод .
- После завершения полупериода величина напряжения снова увеличивается, но теперь в противоположном направлении. Он следует той же схеме, что и положительный полупериод, и известен как 9-й.0300 отрицательный полупериод .
Отрицательный полупериод источника переменного тока
- Комбинация положительных и отрицательных циклов составляет один полный цикл.
- Время, необходимое для завершения этого цикла, известно как Период времени . Обратная величина периода времени равна частоте . Так, для электрической системы частотой 50 Гц этот цикл завершается за 0,02 с. Двигатели переменного тока
- работают по принципу электромагнитной индукции . Он преобразует электрическую энергию (в форме переменного тока) в механическую энергию (вращение вала).
- Принцип работы двигателя переменного тока подробно объясняется после описания базовой конструкции двигателя переменного тока.
Базовая конструкция двигателя переменного тока
Конструкция двигателя переменного тока** Источник изображения
Итак, изучив основы, давайте узнаем, как двигатель переменного тока выглядит изнутри.
- Если упростить конструкцию двигателя переменного тока, то он состоит из двух основных частей. Стационарная конструкция (статор) и вращающаяся часть (ротор).
- Неподвижная часть состоит из катушек, покрывающих всю ее внутреннюю периферию. При прохождении электрического тока через эти обмотки электромагниты возбуждаются, создавая полюса с чередующейся полярностью. В двигателях переменного тока
- в качестве ротора используется либо постоянный магнит , либо сердечник из тонколистовой многослойной стали . Последний использует проводящие стержни вместо катушек проволоки в качестве проводника.
- Вал удерживает вращающуюся часть двигателя. Подшипники между ними обеспечивают свободное перемещение ротора.
- Внешняя рама охватывает как неподвижную, так и вращающуюся часть. Он защищает двигатель от воды или любых других факторов окружающей среды.
**Изображение предоставлено
Подробное описание принципа работы двигателя переменного тока
Чтобы понять, как работает двигатель переменного тока, рассмотрим ротор с постоянными магнитами. Ротор свободно перемещается между двумя полюсами электромагнитного статора (полюсами А и В) с небольшим воздушным зазором между ними. Электромагниты подключаются непосредственно к источнику переменного тока.
При подаче переменного тока на электромагниты подается напряжение, и они образуют магнитные полюса.
Случай 1:
Во время положительного полупериода переменного тока пусть полюс А достигает полярности северного полюса, а полюс В достигает полярности южного полюса. Теперь по закону магнетизма разноименные полюса будут притягиваться друг к другу. Итак, полюс А притягивает южный полюс ротора. И ротор выравнивается в положении, как показано на рисунке.
Случай 2:
Во время отрицательного полупериода полярность питания переменного тока меняется на противоположную, и, следовательно, меняется полярность полюсов. Так что теперь полюс А достигает полярности южного полюса, а полюс Б получает полярность северного полюса.
В этой ситуации одинаковые полюса обращены друг к другу. Таким образом, отталкивающая магнитная сила будет пытаться отклонить ротор от этого положения. Когда ротор отклоняется, в игру вступает сила магнитного притяжения. И, следовательно, теперь полюс А притягивает северный полюс ротора. Ротор выравнивается в новом положении, как показано на рисунке.
Вращающееся магнитное поле в двигателе переменного тока
Ротор повернулся на угол 180 градусов. Ротор снова поворачивается на 180 градусов в предстоящий положительный полупериод и так далее. Этот оборот ротора продолжается до тех пор, пока на обмотку статора подается питание.
Если мы наблюдаем, магнитное поле статора постоянно меняется. В каждом цикле подачи переменного тока кажется, что магнитное поле вращается внутри периферии статора. С технической точки зрения это называется вращающимся магнитным полем.
Что такое RPM (количество оборотов в минуту)?
Оборот ротора на 180 градусов за один цикл переменного тока Для любой вращающейся машины число оборотов в минуту означает скорость вращения ротора. Это количество оборотов ротора за одну минуту. На приведенном выше рисунке показано, что ротор вращается на 180 градусов за один цикл переменного тока. Таким образом, для системы с частотой 50 Гц ротор совершает один оборот за 0,02 секунды. Правильный? Значит, за одну секунду этот ротор сделает 50 оборотов.