MirMarine — Подруливающие устройства

Для обеспечения маневренности судна на очень малом ходу, когда рулевое устройство становится неэффективным, применяют подруливающие устройства, Их устанавливают в поперечных туннелях (в носу, корме) судна для создания упора с помощью ВРЩ. Применяют эти устройства на различных судах, чаще всего на пассажирских, контейнеровозах, танкерах, ро-ро.
Подруливающие устройства особенно эффективны при швартовках судов: сокращается время швартовных операций и повышается безопасность мореплавания; если условия порта позволяют, то швартовка возможна даже без буксиров, что сокращает портовые расходы.
В подруливающем устройстве (рис. 12.51) электродвигатель 1 через муфту 2 приводит в действие ВРШ, размещенный в поперечном туннеле 4. Упор винта и направление тяги регулируют поворотом лопастей 3 с помощью специальной системы гидропривода.
Принцип действия типовой гидравлической системы заключается в следующем (рис. 12.52). Насос 4 постоянной подачи через фильтр 3 принимает рабочую жидкость из цистерны 1 и подает через невозвратный 5 и запорный 7 клапаны к золотниковому распределителю 24. Управление им осуществляется с помощью исполнительного механизма 22 дистанционной электрической системы.
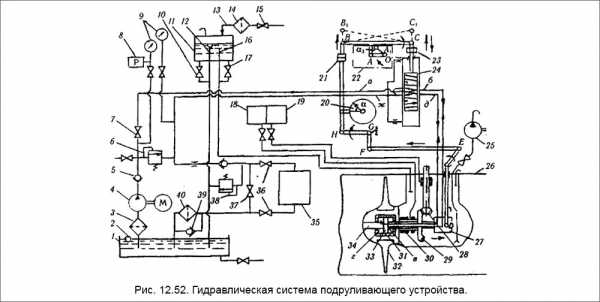
Предположим, что управляющий рычаг ОА повернулся из нулевого положения по часовой стрелке на угол α3 и занял положение ОА1. При этом дифференциальный рычаг ВС занимает положение ВС1, а золотник 24 перемещается вверх. Рабочая жидкость из трубопровода «а» поступает в трубопровод «б» и далее в полость «в» цилиндра изменения шага винта. Цилиндр 31 перемещается вправо по штоку 34 относительно неподвижного поршня 33. Это приведет к повороту лопастей 32. Масло из противоположной полости «г» выталкивается по трубопроводу «б» через золотник 24 в трубопровод «ж» и далее на слив через клапан 37 и фильтр 40.
Перемещение цилиндра 31 передается через подвижное соединение 27, рычаги DE и EF, угловой рычаг FGH, штангу НВ на дифференциальный рычаг ВС, который, вращаясь относительно точки А1 переходит из положения ВС1 в положение В1С. При этом золотник 24 возвращается в нулевое положение, запирает гидроцилиндр, перепускает масло из трубопровода «а» в сливной трубопровод «ж». Поворот лопастей завершен. Фактическое значение угла α, соответствующее заданному углу α3, передается на мостик с помощью датчика 20.
Как видим, золотниковый распределитель 24, гидроцилиндр 31 и рычажный механизм обратной связи представляют следящую систему. Для изменения угла а необходимо новое задание угла α3.
Отрицательный управляющий сигнал вызывает поворот рычага ОА против часовой стрелки, и золотник 24 опускается. При этом нагнетательный трубопровод «а» соединяется с трубопроводом «б», а сливной «ж» с трубопроводом «б». Цилиндр 31 перемещается влево и с помощью рычажного механизма вновь возвращает золотник 24 в нулевое положение.
Расходный бак 11 с клапанами 10, 17 и трубопроводами 12, 16 служит для создания подпора в корпусе редуктора (28 + 29) в целях предотвращения протечек забортной воды, а также пополнения редуктора и цистерны 1 рабочей жидкостью. Бачки 18, 19 обеспечивают контроль состояния уплотнений 30 основного вала и уплотнений ведущего вала 28. Маслоохладитель 35 с клапанами 36 используют при необходимости для предотвращения перегрева масла.
Клапан 6 предохраняет насос и регулируется на максимальное давление примерно 5 МПа. Клапан 39 перепускает масло при значительном загрязнении фильтра 40. Трубопровод 13 с фильтром 14 и клапаном 15 служит для пополнения бака 11, а ручной насос 25 — для откачивания масла из корпуса редуктора. Подруливающее устройство установлено в поперечном туннеле 26. Поплавковое устройство 2 служит для сигнализации о понижении уровня масла в цистерне 1.
Датчик давления 8 и манометры 9 обеспечивают контроль работоспособности гидросистемы. Винтовые соединения 21 и 23 служат для регулирования среднего положения золотника 24 и рычажного механизма обратной связи. Клапан 38 предохраняет маслоохладитель 35 от повышенного давления.
На рис. 12.53 показан основной узел подруливающего устройства — механизм изменения шага (МИШ) лопастей. Он расположен внутри герметичного корпуса 2, соединенного болтами с конусной муфтой 9, которая насажена на основной вал 8. МИШ состоит из подвижного цилиндра 5 и неподвижного поршня 7, имеющего уплотнение 6 и соединенного с корпусом 2 с помощью штока 16. Втулка 15 является рабочей поверхностью подвижного соединения с цилиндром 5.
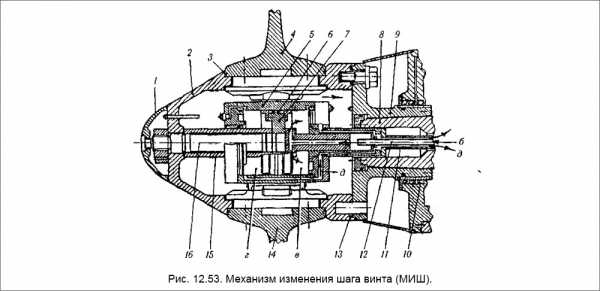
Герметичность корпуса 2 обеспечивается уплотнениями 3 лопастей 4 и 14 и уплотнениями 13. Обтекатель 1 также имеет свои уплотнении. Муфта 9 вращается вместе с валом 8, поэтому уплотняется устройством 10.
Механизм изменения шага действует следующим образом. Рабочая жидкость от насосного агрегата подается, например, по трубе 12 в направлении стрелки «б» и поступает в правую полость «в» цилиндра 5. Он перемещается вправо. Жидкость из левой полости «г» отводится в направлении стрелки «д» по наружной трубе 11 и наоборот (буквенные обозначения соответствуют рис. 12.52).
На внешней поверхности цилиндра 5 имеются сухари специальной формы, которые входят в пазы, расположенные на торцах лопастей 4 и 14 (всего четыре лопасти). Такое соединение превращает линейное перемещение цилиндра во вращательное движение лопастей 4 и 14.
Имеется система дистанционного управления ПУ, а также предусмотрено местное управление, которое используется в случае отказа дистанционной системы. Блокировка отключает систему управления, если при пуске ПУ лопасти находятся не в нулевом положении. Система управления отключается также в случае падения давления в гидросистеме (датчик давления 8, см. рис. 12.52).
Подруливающие устройства изготовляют многие зарубежные фирмы. В качестве примера приведем характеристики ПУ (Россия). Они установлены на судах серии «Инженер Ермошкин» в носовом и кормовом поперечных туннелях, марка — ПУ500-ОМ4.1. Технические характеристики следующие:
Масса — 14100 кг, диаметр винта 2 м, четыре лопасти, поворот лопастей ±21°, частота вращения 244 мин-1, направление — правое, ресурс до заводского ремонта 10 тыс. ч, ресурс непрерывной работы 500 ч. Параметры приводного электродвигателя: тип АКМ500-4ВКОМ4, напряжение 380 В, мощность 500 кВт, частота вращения 1475 мин-1. Параметры гидропривода: наибольшее рабочее давление 5 МПа, масло — АУП в количестве 0,15 м
В зависимости от типа и размеров судна могут устанавливаться от одного (в носовой части судна) до четырех (два в носу и два в корме) подруливающих устройств.
В процессе технического обслуживания подруливающих устройств, как и других машин и механизмов, необходимо руководствоваться фирменной инструкцией. Обычно выполняют следующие работы.
В ходе ежедневного осмотра проверяют герметичность соединений трубопроводов и уровни масла в баках. При осмотре через 50 ч работы берут пробу масла на обводненность.
В ежемесячный осмотр входит проверка работы ПУ в течение 10 мин на различных режимах, всех рабочих параметров электродвигателей и насоса, а также видов управления, блокировок и сигнализаторов.
Ежегодно дополнительно проверяют качество масла, которое при необходимости заменяют, контрольно-измерительные приборы и регулирование предохранительного клапана, промывают фильтры.
Каждые 5 лет эксплуатации заменяют резинотехнические изделия. Срок их службы 7 лет, из них 2 года приходятся на хранение и 5 — на период эксплуатации. При хранении свыше двух лет срок эксплуатации сокращается.
В процессе эксплуатации ПУ возможны следующие типовые неисправности.
При задании нулевого положения лопасти устанавливаются с большой ошибкой. Такую неисправность устраняют регулированием механизма обратной связи с помощью соединений 21 и 23 (см. рис. 12.52). При задании определенного угла лопасти могут продолжать поворачиваться до предельного угла. Это происходит в случае обрыва рычагов в обратной связи DEFGHBC.
Во время включения ПУ лопасти винта могут не поворачиваться. При этом необходимо проверить работу элементов блокировки. Возможны также обрывы в электрической системе управления.
Замедленная скорость поворота лопастей связана, как правило, с утечками рабочей жидкости в системе из-за износа уплотнений. Замена их возможна только в доке.
Лопасти могут не поворачиваться на полный угол вследствие нарушения регулирования предохранительного клапана. Возможно заедание золотника 24 в крайних положениях, а также значительный износ насоса. При наличии в системе гидрозамков их износ может вызвать аналогичную неисправность.
Многие неисправности связаны с загрязнением рабочей жидкости или ее обводнением. Необходим периодический контроль за состоянием жидкости и чистотой фильтров.
Похожие статьи
mirmarine.net
Применение подруливающих устройств. — КиберПедия
Подруливающее устройство (ПУ) является одним из наиболее распространенных вспомогательных средств управления судном. Устройство предназначено для управления судном на малых ходах, то есть в условиях, когда эффективность основных средств управления чаще всего оказывается недостаточной.
Существует большое число модификаций ПУ. Общим конструктивным признаком для всех ПУ является наличие поперечного канала в подводной части корпуса судна и встроенного в него насоса. (рис. 53)
Рис. 53 Схема подруливающего устройства насосного типа:
1 – заборные сопла; 2 – конечные отрезки трубопровода; 3 – насос; 4 – привод насоса; 5 – клинкеты; 6 – приводы клинкетов
По месту расположения на судне различают носовые и кормовые ПУ. Те и другие стремятся размещать на возможно большем удалении от миделя для увеличения вращающего судна момента.
Применение подруливающих устройств эффективно при выполнении швартовных операций и особенно в условиях ветра и течения. Включением ПУ судоводитель может обеспечить движение судна лагом, оборот судна на месте, удержание судна в определенной позиции под действием внешних факторов и т. п.
Подруливающее устройство находят широкое применение на грузовых и пассажирских судах. Для правильного использования судоводителю необходимо знать область их эффективного применения и влияние на поворотливость судна.
Таблица 6
Характеристики подруливающих устройств
| Тип судна | Тип ПУ | Максимальная мощность, кВт | Максимальный упор, кН | Регулируемость упора |
| Пассажирский дизельный электроход типа «Ленин» Пассажирский теплоход типа «Родина» Пассажирский теплоход типа «Октябрьская революция» Грузовой теплоход проекта № 507 Грузовой теплоход проекта № 507 А | Водометное Водометное Роторное Водометное Водометное | 47,5 | 14,2 4,9 8,8 7,3 13,2 | Регулируется Не регулируется Регулируется Не регулируется Не регулируется |
Поскольку тяга ПУ в большинстве случаев направлена нормально к ДП, движение при отсутствие течения и ветра под действием только упора ПУ сводится к вращению судна. Однако это вращение неизбежно сопровождается перемещением судна в сторону оконечности, на которой расположено ПУ, так что, строго говоря, под действием одного ПУ вращение судно на месте не возможно. Поскольку сила упора ПУ приложена в оконечности, центр поворота должен располагаться между центром тяжести G и противоположной оконечностью судна. При этом центр тяжести будет иметь окружную скорость и, следовательно, на судно будет действовать центробежная сила, направленная в сторону ПУ и вызывающая смещение судна. Судно, вращаясь, перемещается в сторону оконечности, на которой расположена ПУ. Перемещение может быть нейтрализовано работой винтов.
Если на двигающимся вперед судне включить носовое подруливающее устройство, то под действием силы возникает дрейф носа судна в сторону поворота. Наличие дрейфа приводит к появлению угла дрейфа, поток воды первоначально набегавший параллельно ДП, начинает набегать на внутренний (по отношению к направлению поворота) борт. Это обуславливает возникновение силы бокового сопротивления , приложенная, как правило, ближе к носу от центра тяжести судна и направлена противоположно дрейфу. Общий поворачивающий момент будет состоять из трех моментов:
, (89)
где — момент упора подруливающего устройства;
— позиционный момент сопротивлению движению;
— демпфирующий момент сопротивлению движения.
Если на том же судне имеется кормовое подруливающее устройство(рис.54), то при его включении возникает дрейф кормы судна в сторону, противоположную повороту судна, поток воды начнет набегать на борт, внешний по отношению к повороту. Схема сил и моментов будет аналогично возникающей при перекладке руля. Общий поворачивающий момент:
, (90)
где — момент силы упора кормового подруливающего устройства.
Сравнивая уравнения, видим, что при условии равенства поворачивающих моментов носового и кормового подруливающих устройств , так как позиционный момент при работе кормового подруливающего устройства способствует повороту, а при работе носового – препятствует ему. Отсюда при движении передним ходом целесообразнее применять при маневрировании кормовое, а при движении на заднем ходу – носовое подруливающее устройство.
Рис. 54 Схема сил действующих на судно при повороте с помощью носового подруливающего устройства: — упор подруливающего устройства; R – сила сопротивления воды; — составляющие силы R; — угол дрейфа; — скорость движения судна; — угловая скорость судна; 1-1 – циркуляция судна
Рис. 55 Схема сил, действующих на судно при повороте с помощью кормового подруливающего устройства: — сила упора подруливающего устройства; 1- 1 — циркуляция
С увеличением скорости движения подруливающее устройства становятся мало эффективными, поэтому их следует применять, при маневрах производящихся на малых скоростях.
Если на судне носовое и кормовое подруливающее устройства, то для осуществления движения лагом достаточно включить оба подруливающих устройства на один борт, а для оборота «на месте» — на разные борта. Скорость движения лагом при этом составляет 0,3 – 0,4 м/с, угловая скорость поворота 4 – 5 град/мин.
Рис. 56 Схема сил, действующих на судно при движении лагом с помощью носового подруливающего (R – сила сопротивления воды корпуса судна)
Движение судна лагом и оборот «на месте» можно производить и с одним подруливающим устройством, используя его совместно с работой движителей и руля. Например, для сообщения судну движение лагом вправо нужно включить носовое подруливающее устройство на правый борт, левой машине дать задний, а правый – передний ход и переложить руль влево на 10 – 15 градусов. Схема сил действующих на судно в этом случая показана на рис. 52. Если сумма моментов относительно центра тяжести судна от движителей и руля , создающая поворот влево, будет равна моменту от подруливающего устройства , создающего поворот вправо,
(91)
то судно разворачиваться не будет и за счет сил и будет двигаться лагом.
Для разворота «на месте» носовое подруливающее устройство нужно включить в сторону поворота. Например, для поворота влево «на месте» схема сил аналогична изображенной на рис. 56, за исключением того, что сила будет направлена в противоположную сторону, и сила R = 0. Тогда
(92)
Весьма эффективным оказывается использование носового ПУ при маневрировании на заднем ходу судна. В этом случае удается создать боковую силу в задней по ходу оконечности судна, момент которой будет действовать согласованно с моментом поперечной корпусной силы.
Указанные особенности обусловили широкое применение ПУ на судах различных типов. Потребная тяга ПУ выбирается обычно в зависимости от площадей проекции на ДП надводной части судна и его подводной части. (см. раздел 4.1)
Суда с развитой надстройкой оснащаются несколькими ПУ. На крупных морских лайнерах и автопассажирских паромах их число достигает 6 (по три в носу и корме).
Отличительной особенностью ПУ является резкое снижение силы тяги с увеличением скорости движения. Объясняется это образованием зоной разрежения позади струи выброса ПУ, взаимодействует со сносящим потоком. Распределение по борту разрежение дает в качестве результирующей вредную силу засасывания, направленную в сторону, противоположную действие тяги ПУ. Таким образом суммарная сила, действующая на судно и ее момент с увеличением скорости уменьшается.
Подруливающими устройствами оборудованы практически все суда типа Ро-Ро. В сочетании с рулем и винтом ПУ обеспечивает высокую маневренность судна: возможность разворота на месте при отсутствии хода, при этом центр вращения О располагается позади ЦТ судна на расстоянии, примерно равно 0,15 L, где L – длина судна.
Рис. 57 Поворот судна на месте при работе носового и кормового ПУ
Вращательный эффект от работы гребного винта может быть легко преодолен НПУ. При достаточном заднем ходе и работе НПУ почти нет разницы, какого вращения винт, правостороннего или левостороннего. Удерживая нос немного левей от выбранного курса,
Рис. 58 Действие носового подруливающего устройства на заднем ходу:
1 – сила НПУ; 2 – боковое сопротивление.
Можно легко компенсировать вращательный эффект винта правостороннего вращения; если винт левостороннего вращения, то следует удерживать нос, несколько правее выбранного курса.
При швартовке кормой НПУ оказывает хорошую помощь давая почти полное управление носом, когда судно движется задним ходом. Поскольку легче погасить задний ход, дав машине ход вперед, чем остановить судно на переднем ходу, то постановка кормой в принципе безопаснее, чем постановка носом.
Эффективность устройства значительно снижается, если на пути струи выбрасываемой из туннеля, есть препятствие. В эксплуатационных условиях, особенно при швартовых операциях, такими препятствиями могут быть стенки причалов, каналов, борта других судов и др. Между бортом и стенкой за счет действия вытекающей струи возникает зона разрежения, в то время как с другого борта давление остается неизменным.
ОГЛАВЛЕНИЕ
Условные обозначения
Введение
1. Основные понятия и определения. Судно как управляемая система.
2. Кинематические параметры движения судна
3. Усилия ,действующие на судно при произвольном движении.
3.1 Общая математическая модель плоского произвольного движения судна
3.2 Гидродинамические усилия, действующие на корпус судна.
3.2.1. Силы, обусловленные инерционностью воды.
3.2.2. Силы, обусловленные вязкостью воды.
3.3. Усилия, индуцируемые движительно-рулевым комплексом (ДРК ).
3.3.1. Общие сведения.
3.3.2. Силы, создаваемые гребным винтом.
3.3.3. Силы, создаваемые рулевым органом.
3.4. Влияние корпуса судна на рулевую силу.
3.5. Силы, возникающие на комплексе «винт-насадка».
4 Нормирование управляемости судов.
4.1. Представление информации о маневренных качествах судна.
4.2. Полюс поворота как критерий поворотливости судов.
4.3. Элементы циркуляции .
4.3.1 . Крен судна на циркуляции.
4.4. Устойчивость судов на курсе.
4.5. Инерционные характеристики судов.
4.6. Управляемость на заднем ходу.
4.7 . Влияние различных конструктивных и эксплуатационных особенностей судна на его маневренные качества.
4.8. Определение маневренных характеристик судов в натурных условиях.
5. Особенности управления судов с различным количеством винтов.
5.1. Управление одновинтовым судном.
5.2. Управление двухвинтовым судном.
5.3. Управление трехвинтовым судном.
5.4. Управление судном, оборудованным поворотными насадками.
5.5. Применение подруливающих устройств
Библиографический список.
Библиографический список
1.Алексеев Л.Л. Практическое пособие по управлению морским судном.С-Пб. ЗАО
2.Гофман А.Д. Осеовы управляемости судна.С-Пб.1999,100с. 3.Лихачев А.В. Управление судном.С-Пб Изд-во Политех.университета,2004,503с..
4.Снопков В.И. Управление судном.С-Пб,»Профессионал»-2004,535с.
5.Соларев Н.Ф.,Белоглазов В.И.,Тронин В.А. и др. Управление судами и составами.Учебник для вузов.-М.Транспорт,1983.-296с.
6.Ходкость и управляемость судовПод редакцией Павленко В.Г.-М.Транспорт,1991.-397с.
7.Временные нормы управляемости толкаемых составов внутреннего плаания.РТМ2120126-86,Л.1987.
8.Инструкция по нормированию габаритов судов и толкаемых составов.-М.-1978.
9.Нормы управляемости грузовых и пассажирских судов внутреннего и смешанного «река-море»плавания.РТМ 212.0131-86.Л.1987.
10.Расчет маневренности и проведение натурных маневренных испытаний судов внутреннего и смешанного плавания.Руководство Р 006-2004.М.2004.
11.Резолюция ИМО 751(18),Промежуточные стандарты маневренных качеств
12.Резолюция ИМО А..601(15).Представление на судах информации об их маневренных характеристиках.
13.Руководство по определению маневренных характеристик судов.РМРС,1999.
cyberpedia.su
Подруливающие устройства
3.8 (75%) 4 голос[ов]
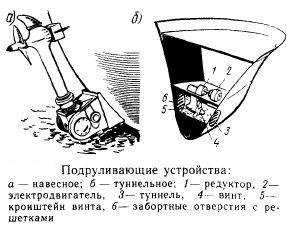
Для повышения маневренных качеств судна применяют различного рода подруливающие устройства. Установленные в носовой или кормовой частях, они создают поперечную силу, которая обеспечивает быстрый разворот судна. По конструктивному оформлению подруливающие устройства можно разделить на три вида: навесные, туннельные и насосные.
Навесное подруливающее устройство представляет собой
винт, установленный на специальном кронштейне в носовой части судна. Вместе с кронштейном винт
может поворачиваться в горизонтальной плоскости, обеспечивая упор в любом желаемом направлении. Наличие подвижного кронштейна у этого типа подруливающего устройства
не позволяет использовать большие мощности, поэтому этот вид подруливающего устройства нашел применение на сравнительно небольших вспомогательных судах.
 Туннельное подруливающее устройство применяется более широко. Суда, оборудованные им, имеют в носовой части ниже ватерлинии туннель — прямой открытый трубопровод, идущий от борта к борту, перпендикулярно диаметральной плоскости. Внутри туннеля помещен винт, при работе которого по туннелю перекачивается вода, в результате чего возникает поперечная сила. Изменение направления упора винта достигается реверсом двигателя или устанавливают винт регулируемого шага, в котором направление упора изменяется поворотом лопастей. Некоторые подруливающие устройства туннельного типа имеют гребной винт на вертикальном валу. Винт помещен в вертикальный туннель,
Туннельное подруливающее устройство применяется более широко. Суда, оборудованные им, имеют в носовой части ниже ватерлинии туннель — прямой открытый трубопровод, идущий от борта к борту, перпендикулярно диаметральной плоскости. Внутри туннеля помещен винт, при работе которого по туннелю перекачивается вода, в результате чего возникает поперечная сила. Изменение направления упора винта достигается реверсом двигателя или устанавливают винт регулируемого шага, в котором направление упора изменяется поворотом лопастей. Некоторые подруливающие устройства туннельного типа имеют гребной винт на вертикальном валу. Винт помещен в вертикальный туннель,
который в верхней части расходится на оба борта. Забор воды производится из-под днища судна, а
ее выход можно с помощью заслонки регулировать на тот или иной борт. Направление упора здесь меняется без реверса двигателя.
Насосное подруливающее устройство имеет в носовой части судна трубопровод, прорезающий ниже ватерлинии обшивку обоих бортов. В среднюю часть трубопровода встроен насос, по обеим сторонам которого имеются клинкеты с дистанционным приводом. Насос перекачивает по трубопроводу воду от одного борта к другому,создавая упор, направление которого обратно потоку воды.
Представляет интерес подруливающее устройство для танкеров, в основе которого лежит идея использования грузовых насосов. Такое устройство состоит из продольного трубопровода, проложенного по палубе от грузовых насосов до носового коффердама. Здесь трубопровод опускается и соединяется с горизонтальной трубой, имеющей выход за борт. При перекачке воды по горизонтальной трубе на левый или правый борт создается поперечная сила.
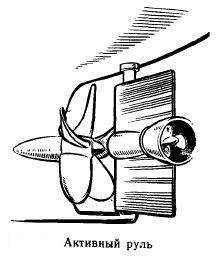 К подруливающим устройствам следует также отнести активный руль Его особенность — наличие вспомогательного винта, установленного на пере руля. Винт приводится в действие электродвигателем, вмонтированным в перо руля и закрытым обтекаемым кожухом. При работе этого винта создается сила — упор винта, которая передается на корпус судна под некоторым углом к диаметральной плоскости, в результате чего создается момент, поворачивающий судно. Величина момента зависит от угла перекладки руля. Максимальный момент будет при угле перекладки, равном 90°, поэтому угол перекладки активного руля не ограничивается.
К подруливающим устройствам следует также отнести активный руль Его особенность — наличие вспомогательного винта, установленного на пере руля. Винт приводится в действие электродвигателем, вмонтированным в перо руля и закрытым обтекаемым кожухом. При работе этого винта создается сила — упор винта, которая передается на корпус судна под некоторым углом к диаметральной плоскости, в результате чего создается момент, поворачивающий судно. Величина момента зависит от угла перекладки руля. Максимальный момент будет при угле перекладки, равном 90°, поэтому угол перекладки активного руля не ограничивается.
Силу, направленную под некоторым углом к диаметральной плоскости, можно получить также с помощью поворотной насадки, которая представляет собой специально спрофилированное кольцо, охватывающее гребной винт. Насадка укреплена на баллере, с помощью которого ее можно поворачивать вокруг вертикальной оси. При повороте насадки отбрасываемая гребным винтом
струя отклоняется, что и вызывает поворот судна. Суда с поворотными насадками могут не иметь обычных рулей. Это устройство нашло применение на речном флоте и на портовых буксирах.
Первоначально подруливающие устройства устанавливались на судах специального назначения (паромы, буксиры и пр,). но в последнее время ими стали оборудовать крупные пассажирские и грузовые суда (например, ролкеры, крупнотоннажные танкеры).
seaspirit.ru
Подруливающее устройство — Global wiki. Wargaming.net
Подруливающее устройствоПодруливающее устройство — предназначается для улучшения маневренности корабля. Существует несколько видов ПУ: навесные, туннельные и насосные. Их установка производится в носовой или кормовой частях корабля. При приведении их в действие, они создают поперечную силу, с помощью которой происходит быстрый разворот корабля.
Навесное подруливающее устройство выглядит в виде винта, который устанавливается на специально предназначенном для этого кронштейне в носовой части корабля. Совместно с кронштейном, он имеет возможность поворачиваться в горизонтальной плоскости для произведения упора в любом нужном направлении. Из-за подвижного кронштейна у данного вида ПУ нет возможности быть использованным на больших мощностях, в следствии чего он устанавливается на небольших вспомогательных кораблях.
Подруливающее устройство, навесное и туннельноеТуннельное подруливающее устройство находит свое применение в большинстве случаев. Корабли на которых оно установлено, имеют туннель, расположенный в носу корабля ниже ватерлинии, представляющий собой прямой открытый трубопровод. Он проходит от одного борта к другому, перпендикулярно диаметральной плоскости. Внутри этого туннеля устанавливается винт, при его запуске по этому открытому трубопроводу перекачивается вода, в следствии чего создается поперечная сила. Некоторые ПУ туннельного вида в своем составе имеют гребной винт на вертикальном валу. Он устанавливается в вертикальный трубопровод который в верхней части расходится на правый и левый борт корабля. В днище корабля происходит забор воды. Выход воды возможно регулировать при помощи заслонки на нужный борт. Направление упора в данном виде меняется без реверса двигателя.
Насосное подруливающее устройство, представляет собой трубопровод проходящий ниже ватерлинии в носовой части корабля и прорезающий обшивку левого и правого борта. В центральную часть трубопровода вмонтирован насос, с двух сторон которого имеются клинкеты с дистанционным приводом. С помощью насоса происходит перекачка по трубопроводу воды от левого борта к правому и наоборот, при этом создается упор, направление которого обратно потоку воды. Данный вид актуален для танкеров.
К подруливающим устройствам также относится активный руль. Его главное особенностью является наличие вспомогательного винта, размещенного на пере руля. Электродвигатель заставляет работать винт который вмонтированным в перо руля и закрыт обтекаемым кожухом. Данный вид устройства применяется на речном флоте и на портовых буксирах.
Изначально ПУ применялись на паромы, буксиры и пр. но в последнее время они стали устанавливаться и на крупные пассажирские и грузовые суда.
См. также
Ссылки
Галерея изображений
Туннельное подруливающее устройство на катере
Подруливающие устройства океанского лайнера Oasis of the Seas
Рабочий в туннеле подруливающего устройства
wiki.wargaming.net
Подруливающее устройство судна
Изобретение относится к области судостроения и касается средств активного управления судном. Подруливающее устройство судна включает установленные на валах движители и электропривод. В качестве движителей используют дискообразные тела круговой формы, которые имеют сферическую выпуклую или вогнутую наружную поверхность, которая повторяет форму наружной поверхности обшивки корпуса судна в месте их установки. Оси вращения дискообразных тел ориентированы перпендикулярно плоскости, касательной к обшивке корпуса в точке пересечения последней с их осями. Дискообразные тела установлены так, что края их наружной поверхности не выступают за пределы наружной поверхности обшивки корпуса. Достигается повышение пропульсивных характеристик основного движителя, увеличение полезного водоизмещения судна и снижение шумности при работе подруливающего устройства. 5 з.п. ф-лы, 4 ил.
Изобретение относится к области судостроения и касается средств активного управления судном, а более конкретно подруливающих устройств (ПУ).
Известно подруливающее устройство, содержащее установленные на валу два противоположно вращающихся гребных винта, размещенных в проточном канале, расположенном поперек корпуса судна вместе с раздаточным редуктором, кинематически связанным с электроприводом, расположенным в корпусе судна вне проточного канала (авт. св. СССР №391006 по заявке №1680581/27-11 от 9.07.1971) — прототип.
Однако известное устройство предполагает наличие в проточном канале герметичной капсулы и стойки, соединяющей редуктор с электроприводом, и наличие двух дорогостоящих элементов ПУ, каковыми являются гребные винты.
Кроме того, наличие в корпусе судна проточного канала, простирающегося от одного борта до другого, приводит к уменьшению полезного водоизмещения судна, тем более, когда на судне может быть установлено не одно, а несколько подобных ПУ. Наряду с этим, наличие проточного канала в носовой оконечности приводит к снижению пропульсивных характеристик основного движителя судна на ходовых режимах. Кроме того, для защиты гребных винтов от повреждения на входе (выходе) в канал, как правило, устанавливаются защитные решетки, что снижает гидродинамические характеристики самого ПУ.
И наконец, размещение подобного устройства в кормовой оконечности судна весьма проблематично (затруднено) вследствие прохождения в этом районе линии валопровода основного движителя.
Задачей предлагаемого изобретения является уменьшение стоимости изготовления ПУ, повышение пропульсивных характеристик основного движителя судна и увеличение полезного водоизмещения судна, а также снижение шумности при работе ПУ.
Для этого в предлагаемом по изобретению подруливающем устройстве судна, включающем установленные на валах движители, расположенные по обе стороны от диаметральной плоскости судна и связанные с электроприводом, в качестве движителей использованы дискообразные тела круговой формы, имеющие сферическую выпуклую или вогнутую наружную поверхность, повторяющую форму наружной поверхности обшивки корпуса судна в месте их установки, причем оси вращения движителей ориентированы перпендикулярно плоскости, касательной к обшивке корпуса в точке пересечения последней с их осями, при этом дискообразные тела установлены так, что края их наружной поверхности не выступают за пределы наружной поверхности обшивки корпуса.
Кроме того, наружная поверхность дискообразных тел выполнена гладкой или шероховатой или имеет выступающие ребра с целью повышения эффективности их работы.
Наряду с этим, полость в кольцевом зазоре между внутренней поверхностью дискообразного тела и поверхностью обечайки сообщена трубопроводом с атмосферой для уменьшения нагрузки на радиально-упорные подшипники устройства.
При этом дискообразные тела установлены с возможностью их втягивания внутрь обечайки на величину осевого зазора, например, с помощью электромагнитной муфты, на ходовых режимах, когда ПУ не работает, для обеспечения их защиты от поломки в случае столкновения с плавающими в воде предметами.
Кроме того, дискообразные тела выполнены с возможностью замены во время эксплуатации судна в случае их повреждения.
Использование в качестве движителей ПУ дискообразных тел круговой формы, имеющих сферически вогнутую или выпуклую, гладкую или шероховатую или имеющую выступающие ребра наружную поверхность, обеспечивает снижение стоимости изготовления движителей и шумности при их работе, а также повышение пропульсивных характеристик основного движителя и гидродинамических характеристик самого ПУ.
Выбор выпуклой или вогнутой поверхности дискообразных тел позволяет обеспечить их установку независимо от формы обводов корпуса судна в требуемом месте их расположения.
Сущность изобретения поясняется чертежами: на Фиг.1 показано расположение ПУ на судне, на Фиг.2 — сферически выпуклая наружная поверхность ПУ, на Фиг.3 — сферически вогнутая наружная поверхность ПУ, на фиг.4 — основной рабочий узел устройства, установленного в корпусе судна.
Подруливающее устройство судна имеет движители 1, установленные на валу 2, которые расположены по обе стороны от диаметральной плоскости (ДП) судна 3 (Фиг.1-3). В качестве движителей использованы дискообразные тела круговой формы, имеющие сферическую выпуклую (Фиг.2) или вогнутую (Фиг.3) наружную поверхность. Поверхность дискообразного тела может быть выполнена гладкой или шероховатой или иметь выступающие ребра. Оси вращения 4 движителей ориентированы перпендикулярно плоскости, касательной к обшивке 5 корпуса в точке пересечения последней с осями дискообразных тел (Фиг.1). Дискообразные тела размещены с кольцевым зазором 6 в обечайках 7 (Фиг.1, 4), вмонтированных в корпус судна заподлицо с его обшивкой. При этом край контура 8 наружной поверхности дискообразных тел не выступает за пределы наружной поверхности обшивки корпуса (Фиг.1, 4). Причем полость в кольцевом зазоре может быть сообщена с атмосферой. Поверхность дискообразных тел может иметь шероховатость или выступающие ребра. Дискообразные тела установлены с возможностью их втягивания внутрь обечайки 7 на величину зазора вдоль оси вращения.
Вал дискообразных тел 2 установлен на подшипниках 9 через сальник 10, расположенных в стакане 11 (Фиг.4), и связан через муфту 12 с электроприводом 13, размещенным в корпусе судна на площадке 14 (Фиг.1).
Для более эффективного поворота или смещения судна ПУ установлены как в носовой части судна, так и в кормовой.
Устройство работает следующим образом.
При вращении дискообразного тела за счет сил вязкости происходит закрутка воды на самом теле и дальнейшее ее растекание вдоль поверхности обшивки корпуса судна. В результате этого на дискообразном теле и на корпусе судна в районе расположения работающего ПУ образуется движение воды и создается пониженное давление, в то время как с противоположного борта, где расположено такое же устройство, находящееся в одной с ним плоскости шпангоута не работает, и там не происходит движения воды, а следовательно, не происходит и понижение давления на корпусе судна. Образующаяся в результате этого разность давлений по обеим сторонам борта и создает силу в направлении поперечном диаметральной плоскости судна, которая создает вращающий момент судна вокруг его вертикальной оси.
Наличие второй пары ПУ в противоположной оконечности судна, работающей противоположным образом (при работе левого носового устройства, работает правое кормовое и наоборот), создает пару сил, которая приводит к повышению эффективности работы ПУ, как средства активного управления судна на швартовых и близких к швартовому ходовых режимах.
Особо следует подчеркнуть, что при работе обычного классического ПУ с поперечным проточным каналом и с гребным винтом, в случае стоянки судна вблизи стенки, происходит широко известный эффект, когда судно не отходит от стенки, а присасывается к ней. Предлагаемое ПУ не имеет указанного недостатка, поскольку при таком маневре в работе находятся сразу два устройства с противоположного борта.
При этом вследствие отсутствия проточных поперечных каналов (бывают конструкции ПУ и с Т-образным каналом) увеличивается полезное водоизмещение судна и повышаются пропульсивные характеристики основного движителя на ходовых режимах.
Предлагаемое устройство, в силу своей компактности, может быть установлено на большем чем у прототипа расстоянии от миделя, что повышает эффективность его работы, и оно может быть установлено в районе прохождения линии валопровода главного движителя 15 (Фиг.1) в кормовой оконечности судна, поскольку для его работы не требуется организовывать проточный канал от борта до борта. При этом мощность электродвигателя, требуемая для вращения таких дискообразных тел, значительно ниже, чем мощность электродвигателя, предназначенного для вращения гребного винта, а стоимость изготовления предлагаемого устройства существенно ниже стоимости устройства, использующего в качестве движителя гребной винт.
Дискообразное тело может быть съемным и легко заменено в случае его повреждения в процессе эксплуатации, а обслуживание и ремонт привода ПУ, в частности замена электродвигателя, подшипников, сальников, муфты, могут быть выполнены судовыми механиками без привлечения водолазов или постановки судна в док, а путем установки с наружной стороны судна пластыря.
Модельные испытания ПУ, проведенные в опытовом бассейне, показали эффективность и работоспособность предлагаемой конструкции ПУ.
Предлагаемое ПУ судна позволяет существенно снизить стоимость его изготовления и шумность при его работе, а также повысить пропульсивные характеристики основного движителя судна и гидродинамические характеристики самого устройства, что выгодно отличает его от прототипа.
1. Подруливающее устройство судна, включающее установленные на валах движители, расположенные по обе стороны от диаметральной плоскости судна и связанные с электроприводом, отличающееся тем, что в качестве движителей использованы дискообразные тела круговой формы, имеющие сферическую выпуклую или вогнутую наружную поверхность, повторяющую форму наружной поверхности обшивки корпуса судна в месте их установки, оси вращения которых ориентированы перпендикулярно плоскости, касательной к обшивке корпуса в точке пересечения последней с их осями, при этом дискообразные тела установлены так, что края их наружной поверхности не выступают за пределы наружной поверхности обшивки корпуса.
2. Подруливающее устройство судна по п.1, отличающееся тем, что поверхность дискообразного тела может быть выполнена гладкой или шероховатой или иметь выступающие ребра.
3. Подруливающее устройство судна по п.1, отличающееся тем, что дискообразные тела размещены в обечайках, вмонтированных в корпус судна, и установлены с кольцевым зазором между обечайкой и поверхностью дискообразного тела.
4. Подруливающее устройство судна по п.1, отличающееся тем, что полость в кольцевом зазоре между поверхностью дискообразного тела и поверхностью обечаек сообщена трубопроводом с атмосферой.
5. Подруливающее устройство судна по любому из пп.1-4, отличающееся тем, что дискообразные тела установлены с возможностью их втягивания внутрь обечайки на величину осевого зазора.
6. Подруливающее устройство судна по п.5, отличающееся тем, что дискообразные тела выполнены с возможностью замены в ходовых условиях в случае их повреждения.
findpatent.ru
Подруливающее устройство судна
Изобретение относится к области судостроения и касается средств активного управления судном, а более конкретно — подруливающих устройств (ПУ).
Известно подруливающее устройство, содержащее установленные на валу два противоположно вращающихся гребных винта, размещенных в проточном канале, расположенном поперек корпуса судна вместе с раздаточным редуктором, кинематически связанным с электроприводом, расположенным в корпусе судна вне проточного канала (авт. свидетельство СССР №391006 по заявке №1680581/27-11 от 9.07.1971 г.) — прототип.
Однако известное устройство предполагает наличие в проточном канале герметичной капсулы и стойки, соединяющей редуктор с электроприводом, и наличие двух дорогостоящих элементов ПУ, каковыми являются гребные винты.
Кроме того, наличие в корпусе судна проточного канала, простирающегося от одного борта до другого, приводит к уменьшению полезного водоизмещения судна, тем более, когда на судне может быть установлено не одно, а несколько подобных ПУ. Наряду с этим наличие проточного канала в носовой оконечности приводит к снижению пропульсивных характеристик основного движителя на ходовых режимах, а для защиты гребных винтов от повреждения на входе (выходе) в канал, как правило, устанавливаются защитные решетки, что снижает гидродинамические характеристики самого ПУ.
И наконец, размещение подобного устройства в кормовой оконечности судна весьма проблематично (затруднено) вследствие прохождения в этом районе линии валопровода основного движителя.
Задачей предлагаемого изобретения является уменьшение стоимости изготовления ПУ, повышение пропульсивных характеристик основного движителя судна и полезного водоизмещения судна, а также снижение шумности при работе ПУ.
Для этого в подруливающем устройстве судна, включающем установленные на валу движители, расположенные по обе стороны от диаметральной плоскости судна и связанные с электроприводом, по изобретению в качестве движителей использованы диски круговой формы, имеющие плоскую или сферическую наружную поверхность, оси вращения которых ориентированы перпендикулярно плоскости, касательной к обшивке судна в точке пересечения последней с осями дисков. При этом диски размещены в обечайках, вмонтированных в корпус судна заподлицо с его обшивкой, с которой, также заподлицо, расположены края контура наружной поверхности дисков.
Кроме того, диски имеют гладкую, шероховатую поверхность, или выступающие ребра, с целью повышения эффективности их работы.
Наряду с этим полость в кольцевом зазоре между внутренней поверхностью диска и поверхностью обечайки сообщена трубопроводом с атмосферой для уменьшения нагрузки на радиально-упорные подшипники устройства.
При этом диски установлены с возможностью их втягивания внутрь обечайки на величину осевого зазора, например, с помощью электромагнитной муфты, на ходовых режимах, когда ПУ не работает.
Кроме того, диски выполнены с возможностью замены во время эксплуатации судна в случае их повреждения.
Использование в качестве движителей ПУ дисков круговой формы, имеющих плоскую, сферическую, гладкую или шероховатую наружную поверхность, обеспечивает снижение стоимости изготовления движителей и шумности при их работе, а также повышение пропульсивных характеристик основного движителя и гидродинамических характеристик самого ПУ.
Сущность изобретения поясняется чертежами, где на фиг.1 показано расположение ПУ на судне, на фиг.2 — разрез А-А на фиг.1, а на фиг.3 — основной рабочий узел устройства, приведенного на фиг.1, 2
Подруливающее устройство судна имеет движители 1, установленные на валу 2, которые расположены по обе стороны от диаметральной плоскости судна 3 (см. фиг.1-3). В качестве движителей 1 использованы диски круговой формы, имеющие плоскую или сферическую наружную поверхность (не показано). Оси вращения 4 движителей 1 ориентированы перпендикулярно плоскости, касательной к обшивке 5 корпуса в точке пересечения последней с осями дисков (фиг.1-3). Диски 1 размещены с зазором 6 в обечайках 7 (фиг.3), вмонтированных в корпус судна 3 заподлицо с его обшивкой 5. Край контура 8 наружной поверхности дисков 1 также расположен заподлицо с обшивкой 5 корпуса судна 3 (фиг.1-3).
Вал 2 дисков 1 установлен на подшипниках 9 через сальник 10, расположенный в стакане 11 (фиг.3), и связан через муфту 12 с электроприводом 13, размещенным в корпусе судна на площадке 14 (фиг.1, 2).
Для более эффективного поворота или смещения судна ПУ установлены как в носовой части судна, так и в кормовой.
Устройство работает следующим образом.
При вращении дисков 1 за счет сил вязкости происходит закрутка воды на самом диске и дальнейшее ее растекание вдоль поверхности обшивки 5 корпуса судна 3. В результате этого на диске 1 и на корпусе судна 3 в районе расположения работающего ПУ образуется движение воды и создается пониженное давление, в то время как с противоположного борта такое же устройство, находящееся в одной с ним плоскости шпангоута, не должно работать, и там не происходит движения воды, а следовательно, не происходит и понижения давления на корпусе судна. Разность давлений по обеим сторонам борта и создает силу в направлении, поперечном диаметральной плоскости судна, которая создает вращающий момент судна вокруг его вертикальной оси.
Наличие второй пары ПУ в противоположной оконечности судна, работающей противоположным образом (при работе левого носового устройства, работает правое кормовое и наоборот), создает пару сил, которая приводит к повышению эффективности работы ПУ, как средства активного управления судна на швартовых и близких к швартовому ходовых режимах.
Особо следует подчеркнуть, что при работе обычного, классического ПУ с поперечным проточным каналом с гребным винтом, в случае стоянки судна вблизи стенки, происходит широко известный эффект, когда судно не отходит от стенки, а присасывается к ней. Предлагаемое ПУ не имеет подобного недостатка, поскольку при данном маневре в работе находятся сразу два устройства с противоположного борта.
При этом, вследствие отсутствия проточных поперечных каналов, а бывают конструкции ПУ и с Т-образным каналом, увеличивается полезное водоизмещение судна и повышаются пропульсивные характеристики основного движителя на ходовых режимах.
Предлагаемое устройство, в силу своей компактности, может быть установлено на большем расстоянии от миделя, что повышает эффективность его работы и может быть установлено в районе прохождения линии валопровода главного движителя 15 (фиг.1) в кормовой оконечности судна, поскольку для его работы не требуется организовывать проточный канал от борта до борта.
Необходимо особо отметить, что мощность электродвигателя, требуемая для вращения таких дисков, значительно ниже, чем мощность электродвигателя, предназначенного для вращения гребного винта, а стоимость изготовления такого устройства будет существенно ниже устройства, использующего в качестве движителя гребной винт.
Диск может быть съемным и легко заменен в случае его повреждения в процессе эксплуатации, а обслуживание и ремонт привода ПУ, в частности замена электродвигателя, подшипников, сальников, муфты, могут быть выполнены судовыми механиками без привлечения водолазов или постановки судна в док путем установки наружной стороны судна пластыря.
Модельные испытания ПУ, проведенные в опытовом бассейне института, показали эффективность и работоспособность предлагаемой конструкции ПУ.
Предлагаемое ПУ судна позволяет существенно снизить стоимость его изготовления и шумность при его работе, а также повысить пропульсивные характеристики основного движителя и гидродинамических характеристик самого устройства, что его выгодно отличает от прототипа.
edrid.ru
Подруливающее устройство судна
Изобретение относится к области судостроения и касается средств активного управления судном, а более конкретно — подруливающих устройств. Подруливающее устройство включает движители и электропривод. Движители установлены на валу, расположены по обе стороны от диаметральной плоскости судна и связаны с электроприводом. В качестве движителей использованы диски. Оси вращения дисков ориентированы перпендикулярно плоскости, касательной к обшивке корпуса в точке пересечения последней с осями дисков. Диски размещены в обечайках. Обечайки вмонтированы в корпус судна заподлицо с его обшивкой. Края контура наружной поверхности дисков также расположены заподлицо с обшивкой корпуса судна. Достигается повышение пропульсивных характеристик основного движителя судна и полезного водоизмещения судна, а также снижение шумности при работе подруливающего устройства. 4 з.п. ф-лы, 3 ил.
Изобретение относится к области судостроения и касается средств активного управления судном, а более конкретно — подруливающих устройств (ПУ).
Известно подруливающее устройство, содержащее установленные на валу два противоположно вращающихся гребных винта, размещенных в проточном канале, расположенном поперек корпуса судна вместе с раздаточным редуктором, кинематически связанным с электроприводом, расположенным в корпусе судна вне проточного канала (авт. свидетельство СССР №391006 по заявке №1680581/27-11 от 9.07.1971 г.) — прототип.
Однако известное устройство предполагает наличие в проточном канале герметичной капсулы и стойки, соединяющей редуктор с электроприводом, и наличие двух дорогостоящих элементов ПУ, каковыми являются гребные винты.
Кроме того, наличие в корпусе судна проточного канала, простирающегося от одного борта до другого, приводит к уменьшению полезного водоизмещения судна, тем более, когда на судне может быть установлено не одно, а несколько подобных ПУ. Наряду с этим наличие проточного канала в носовой оконечности приводит к снижению пропульсивных характеристик основного движителя на ходовых режимах, а для защиты гребных винтов от повреждения на входе (выходе) в канал, как правило, устанавливаются защитные решетки, что снижает гидродинамические характеристики самого ПУ.
И наконец, размещение подобного устройства в кормовой оконечности судна весьма проблематично (затруднено) вследствие прохождения в этом районе линии валопровода основного движителя.
Задачей предлагаемого изобретения является уменьшение стоимости изготовления ПУ, повышение пропульсивных характеристик основного движителя судна и полезного водоизмещения судна, а также снижение шумности при работе ПУ.
Для этого в подруливающем устройстве судна, включающем установленные на валу движители, расположенные по обе стороны от диаметральной плоскости судна и связанные с электроприводом, по изобретению в качестве движителей использованы диски круговой формы, имеющие плоскую или сферическую наружную поверхность, оси вращения которых ориентированы перпендикулярно плоскости, касательной к обшивке судна в точке пересечения последней с осями дисков. При этом диски размещены в обечайках, вмонтированных в корпус судна заподлицо с его обшивкой, с которой, также заподлицо, расположены края контура наружной поверхности дисков.
Кроме того, диски имеют гладкую, шероховатую поверхность, или выступающие ребра, с целью повышения эффективности их работы.
Наряду с этим полость в кольцевом зазоре между внутренней поверхностью диска и поверхностью обечайки сообщена трубопроводом с атмосферой для уменьшения нагрузки на радиально-упорные подшипники устройства.
При этом диски установлены с возможностью их втягивания внутрь обечайки на величину осевого зазора, например, с помощью электромагнитной муфты, на ходовых режимах, когда ПУ не работает.
Кроме того, диски выполнены с возможностью замены во время эксплуатации судна в случае их повреждения.
Использование в качестве движителей ПУ дисков круговой формы, имеющих плоскую, сферическую, гладкую или шероховатую наружную поверхность, обеспечивает снижение стоимости изготовления движителей и шумности при их работе, а также повышение пропульсивных характеристик основного движителя и гидродинамических характеристик самого ПУ.
Сущность изобретения поясняется чертежами, где на фиг.1 показано расположение ПУ на судне, на фиг.2 — разрез А-А на фиг.1, а на фиг.3 — основной рабочий узел устройства, приведенного на фиг.1, 2
Подруливающее устройство судна имеет движители 1, установленные на валу 2, которые расположены по обе стороны от диаметральной плоскости судна 3 (см. фиг.1-3). В качестве движителей 1 использованы диски круговой формы, имеющие плоскую или сферическую наружную поверхность (не показано). Оси вращения 4 движителей 1 ориентированы перпендикулярно плоскости, касательной к обшивке 5 корпуса в точке пересечения последней с осями дисков (фиг.1-3). Диски 1 размещены с зазором 6 в обечайках 7 (фиг.3), вмонтированных в корпус судна 3 заподлицо с его обшивкой 5. Край контура 8 наружной поверхности дисков 1 также расположен заподлицо с обшивкой 5 корпуса судна 3 (фиг.1-3).
Вал 2 дисков 1 установлен на подшипниках 9 через сальник 10, расположенный в стакане 11 (фиг.3), и связан через муфту 12 с электроприводом 13, размещенным в корпусе судна на площадке 14 (фиг.1, 2).
Для более эффективного поворота или смещения судна ПУ установлены как в носовой части судна, так и в кормовой.
Устройство работает следующим образом.
При вращении дисков 1 за счет сил вязкости происходит закрутка воды на самом диске и дальнейшее ее растекание вдоль поверхности обшивки 5 корпуса судна 3. В результате этого на диске 1 и на корпусе судна 3 в районе расположения работающего ПУ образуется движение воды и создается пониженное давление, в то время как с противоположного борта такое же устройство, находящееся в одной с ним плоскости шпангоута, не должно работать, и там не происходит движения воды, а следовательно, не происходит и понижения давления на корпусе судна. Разность давлений по обеим сторонам борта и создает силу в направлении, поперечном диаметральной плоскости судна, которая создает вращающий момент судна вокруг его вертикальной оси.
Наличие второй пары ПУ в противоположной оконечности судна, работающей противоположным образом (при работе левого носового устройства, работает правое кормовое и наоборот), создает пару сил, которая приводит к повышению эффективности работы ПУ, как средства активного управления судна на швартовых и близких к швартовому ходовых режимах.
Особо следует подчеркнуть, что при работе обычного, классического ПУ с поперечным проточным каналом с гребным винтом, в случае стоянки судна вблизи стенки, происходит широко известный эффект, когда судно не отходит от стенки, а присасывается к ней. Предлагаемое ПУ не имеет подобного недостатка, поскольку при данном маневре в работе находятся сразу два устройства с противоположного борта.
При этом, вследствие отсутствия проточных поперечных каналов, а бывают конструкции ПУ и с Т-образным каналом, увеличивается полезное водоизмещение судна и повышаются пропульсивные характеристики основного движителя на ходовых режимах.
Предлагаемое устройство, в силу своей компактности, может быть установлено на большем расстоянии от миделя, что повышает эффективность его работы и может быть установлено в районе прохождения линии валопровода главного движителя 15 (фиг.1) в кормовой оконечности судна, поскольку для его работы не требуется организовывать проточный канал от борта до борта.
Необходимо особо отметить, что мощность электродвигателя, требуемая для вращения таких дисков, значительно ниже, чем мощность электродвигателя, предназначенного для вращения гребного винта, а стоимость изготовления такого устройства будет существенно ниже устройства, использующего в качестве движителя гребной винт.
Диск может быть съемным и легко заменен в случае его повреждения в процессе эксплуатации, а обслуживание и ремонт привода ПУ, в частности замена электродвигателя, подшипников, сальников, муфты, могут быть выполнены судовыми механиками без привлечения водолазов или постановки судна в док путем установки наружной стороны судна пластыря.
Модельные испытания ПУ, проведенные в опытовом бассейне института, показали эффективность и работоспособность предлагаемой конструкции ПУ.
Предлагаемое ПУ судна позволяет существенно снизить стоимость его изготовления и шумность при его работе, а также повысить пропульсивные характеристики основного движителя и гидродинамических характеристик самого устройства, что его выгодно отличает от прототипа.
1. Подруливающее устройство, включающее установленные на валу движители, расположенные по обе стороны от диаметральной плоскости судна и связанные с электроприводом, отличающееся тем, что в качестве движителей использованы диски, оси вращения которых ориентированы перпендикулярно плоскости, касательной к обшивке корпуса в точке пересечения последней с осями дисков, при этом диски размещены в обечайках, вмонтированных в корпус судна заподлицо с его обшивкой, с которой также заподлицо расположены края контура наружной поверхности дисков.
2. Устройство по п.1, отличающееся тем, что поверхность диска может иметь шероховатость или выступающие ребра.
3. Устройство по п.1, отличающееся тем, что полость в кольцевом зазоре между поверхностью диска и поверхностью обечаек сообщена трубопроводом с атмосферой.
4. Устройство по п.1 или 3, отличающееся тем, что диски установлены с возможностью их втягивания внутрь обечайки на величину осевого зазора.
5. Устройство по п.1, отличающееся тем, что диски выполнены с возможностью замены в ходовых условиях в случае их повреждения.
findpatent.ru