Устройство, принцип работы и подключения электродвигателей переменного тока | Полезные статьи
Электродвигатели переменного тока являются электротехническими устройствами, которые преобразовывают электрическую энергию в механическую. Электромоторы нашли широкое применение во многих отраслях промышленности для привода всевозможных станков и механизмов. Без такого оборудования невозможна работа стиральных машин, холодильников, соковыжималок, кухонных комбайнов, вентиляторов и других бытовых приборов.
По принципу работы электродвигатели переменного тока делятся на синхронные и асинхронные. Асинхронные электромоторы переменного тока наиболее часто применяются в промышленности.
 Асинхронный двигатель с креплением к фланцу
Асинхронный двигатель с креплением к фланцу
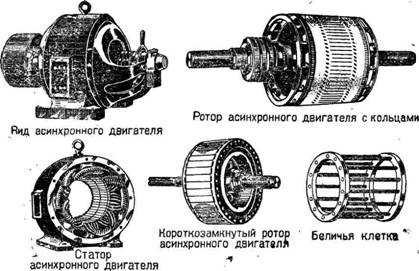
Стоит рассмотреть устройство электродвигателя переменного тока асинхронного.
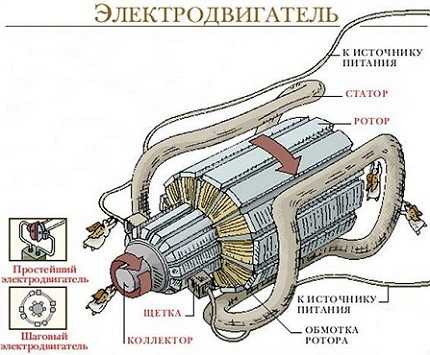
Данный вид электромоторов состоит из главных частей — статора и ротора. В современных асинхронных электромоторах статор имеет неявно выраженные полюсы.
Для того чтобы максимально снизить потери от вихревых токов, сердечник статора изготавливают из соответствующей толщины листов электротехнической стали, подвергшихся штамповке. В пазы статора впрессовывается обмотка из медного провода. Фазовые обмотки статора устройства могут соединяться «звездой» или «треугольником». При этом все начала и концы впрессованных обмоток электромотора выводятся на корпус — в клеммную коробку. Подобное устройство статора электродвигателя оправданно, так как дает возможность включать его обмотки на различные стандартные напряжения. Сердечник статора запрессовывается в чугунный или алюминиевый корпус.
Устройство асинхронного электродвигателя
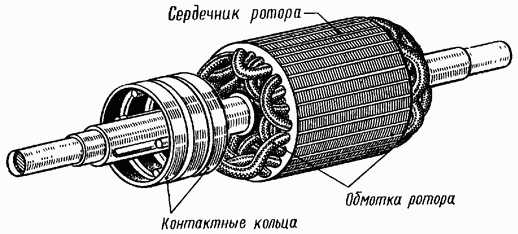
Ротор асинхронного мотора также состоит из подвергшихся штамповке листов электротехнической стали, и во все его пазы закладывается обмотка.
Учитывая конструкцию ротора, асинхронные электродвигатели подразделяются на устройства с короткозамкнутым ротором и фазным ротором.
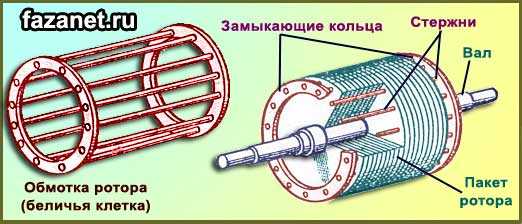
Обмотку короткозамкнутого ротора, сделанную из медных стержней, закладывают в пазы ротора. При этом все торцы стержней соединяют при помощи медного кольца. Данный вариант обмотки считается обмоткой типа «беличья клетка». Стоит отметить, что медные стержни в пазах ротора не изолируются. Во многих асинхронных электромоторах «беличью клетку» сменяют литым ротором. Ротор напрессовывается на вал двигателя и является с ним одним целым.
Синхронные электродвигатели устанавливаются в различных электроинструментах, пылесосах, стиральных машинах. На корпусе синхронного электромотора переменного тока имеется сердечник полюса, в котором расположены обмотки. Обмотки возбуждения намотаны и на якорь. Их выводы припаяны ко всем секторам токосъемного коллектора, на которые при использовании графитовых щеток подается напряжение.
Устройство синхронного электродвигателя
Принцип действия электродвигателя переменного тока основан на применении закона электромагнитной индукции. При взаимодействии переменного электрического тока в проводнике и магните может возникнуть непрерывное вращение.
В синхронном электродвигателе якорь вращается синхронно с электромагнитным полем полюса, а у асинхронного электромотора ротор вращается с отставанием от вращающегося магнитного поля статора.
Для работы асинхронного электромотора необходимо, чтобы ротор устройства вращался в более медленном темпе, чем электромагнитное поле статора. При подаче тока на обмотку статора между сердечником статора и ротора возникает электромагнитное поле, которое наводит ЭДС в роторе. Возникает вращающийся момент, и вал электродвигателя начинает вращаться. Из-за трения подшипников или определенной нагрузки на вал, ротор асинхронного двигателя всегда вращается в более медленном темпе.
Принцип работы электродвигателя переменного тока асинхронного заключается в том, что магнитные полюса устройства постоянно вращаются в обмотках электромотора и направление тока в роторе постоянно меняется.
Скорость вращения ротора электромотора асинхронного зависит от общего количества полюсов. Для того чтобы понизить скорость вращения ротора в таком двигателе, требуется увеличить общее количество полюсов в статоре.
В синхронных электродвигателях вращающий момент в устройстве создается при взаимодействии между током в обмотке якоря и магнитным потоком в обмотке возбуждения. При изменении направления переменного тока одновременно меняется направление магнитного потока в корпусе и якоре. При таком варианте вращение якоря всегда будет в одну сторону. Примечательно, что плавная регулировка скорости вращения таких электромоторов регулируется величиной подаваемого напряжения, при помощи реостата или переменного сопротивления.
В зависимости от напряжения сети фазные обмотки статора асинхронного электромотора могут подсоединяться в «звезду» или «треугольник». Схема электродвигателя переменного тока при подключении его в сеть с напряжением 220 Вольт обмотки соединяются в треугольник, а при подключении в сеть 380 Вольт — схема обмоток имеет вид звезды.
cable.ru
Принцип работы электродвигателя. Простыми словами о сложном
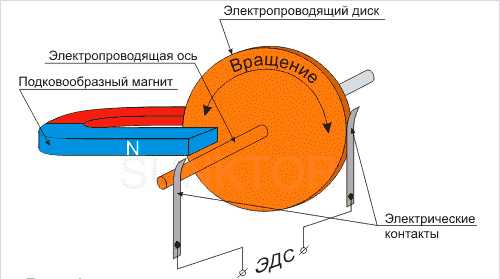
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
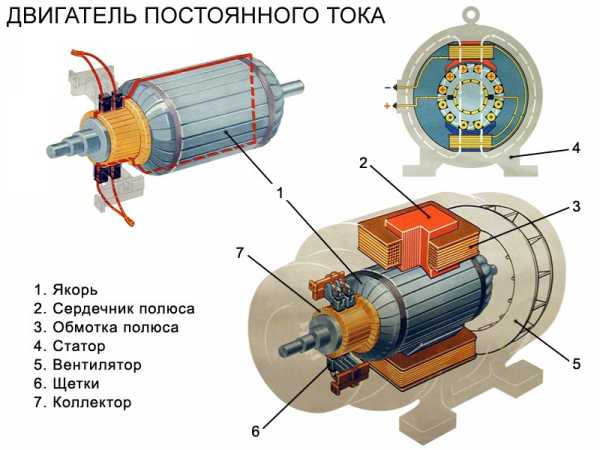
Принцип работы электродвигателя постоянного тока
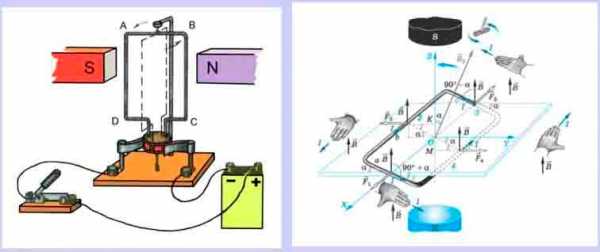
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…
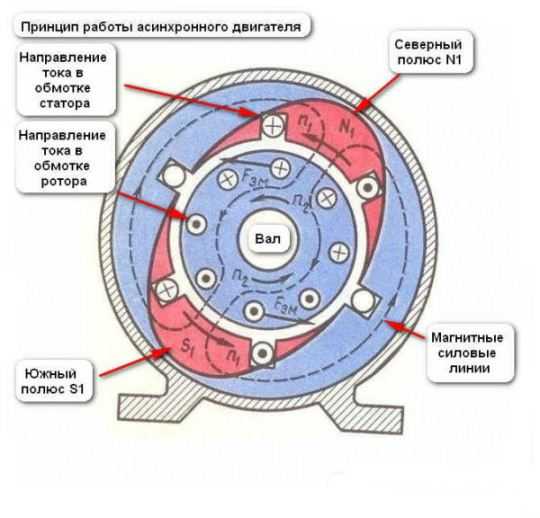
Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:

Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.

Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.

Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
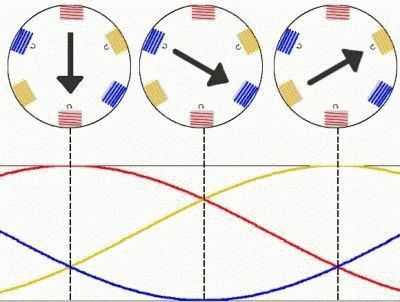
Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.

Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
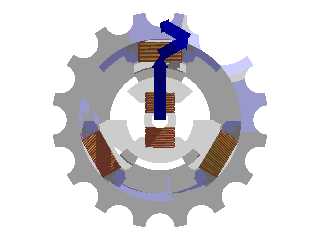
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
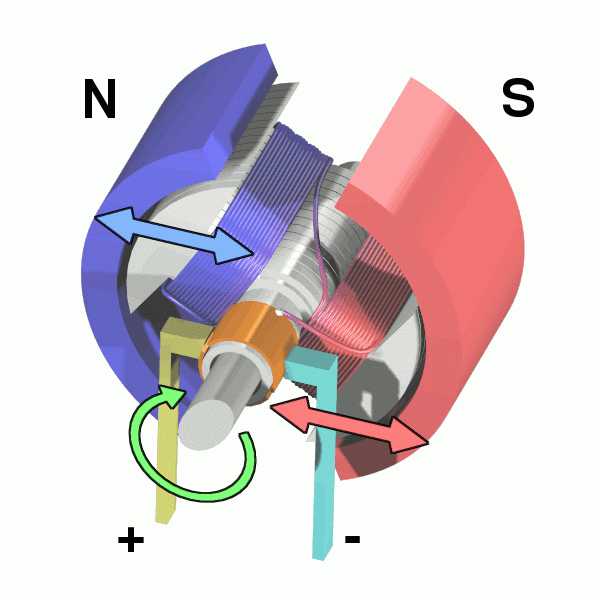
Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.

Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
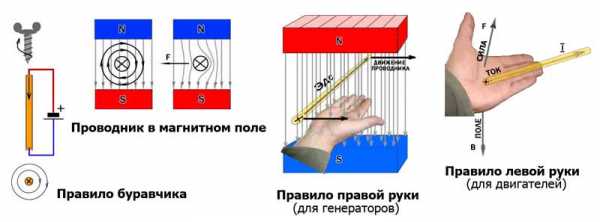
Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
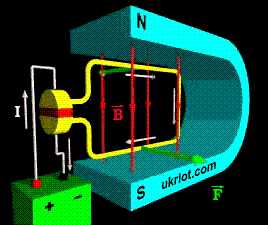
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
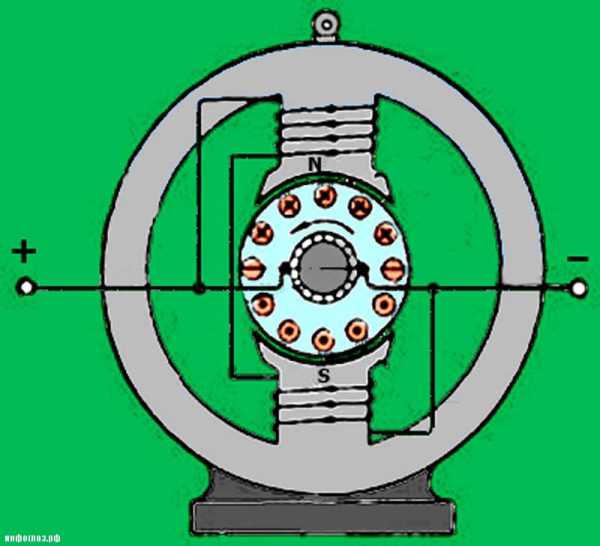
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
powercoup.by
Принцип работы электродвигателей
Принцип работы электродвигателей. Основные понятия.
Магнетизм
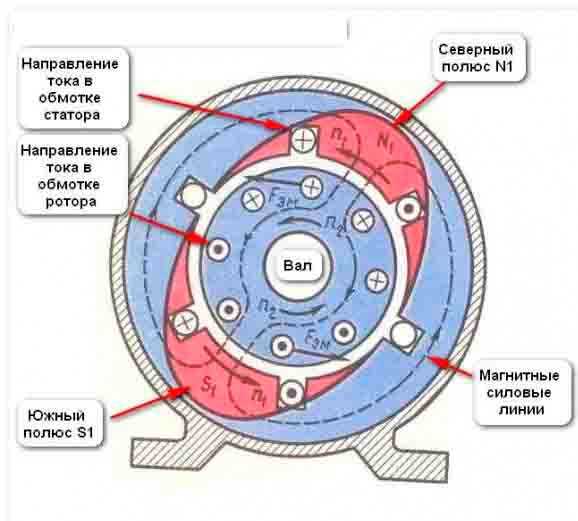
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.

Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
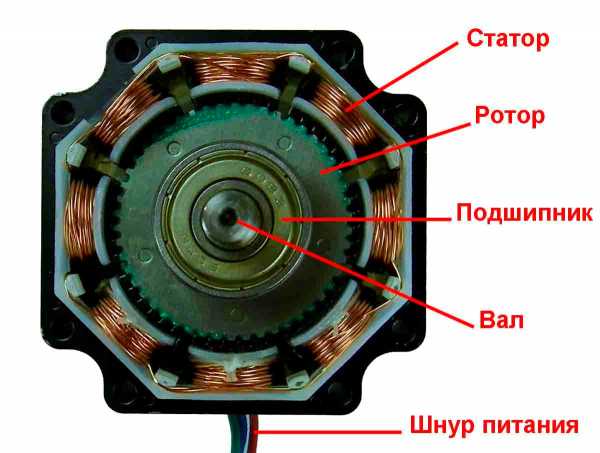
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Ротор:
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

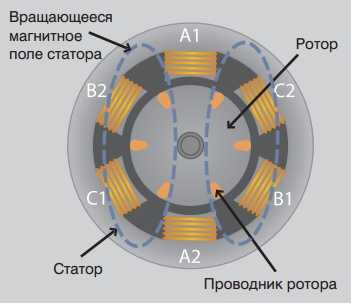
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.

Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
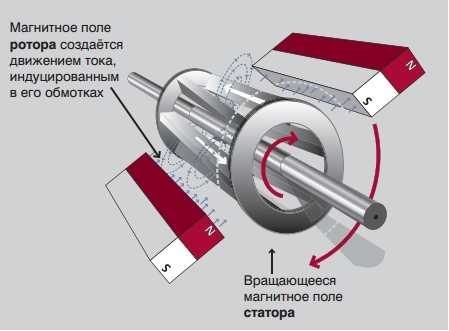
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
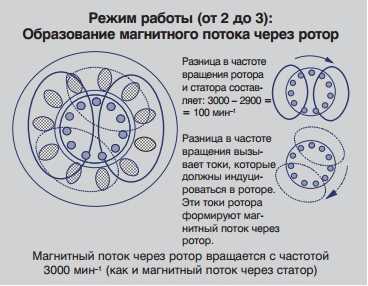
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
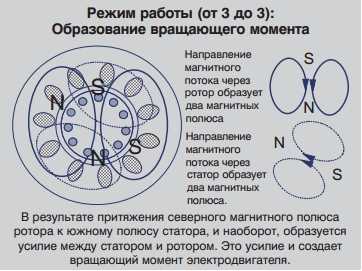
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

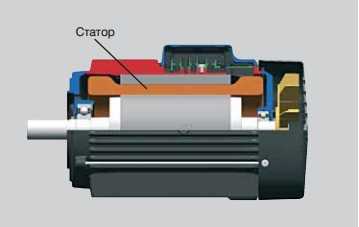
Статор элетродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.

При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.

Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Число полюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
2 | 3000 | 3600 |
4 | 1500 | 1800 |
6 | 1000 | 1200 |
8 | 750 | 900 |
12 | 500 | 600 |
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше. Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента. Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.

www.eti.su
принцип работы, из чего состоит?
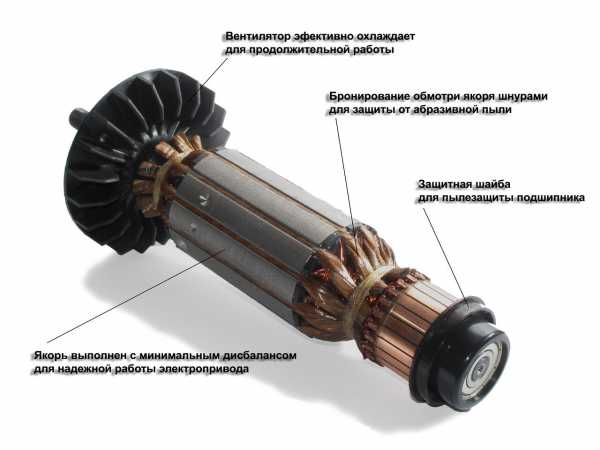
Выполнение механической работы — это главный процесс в нашем материальном мире. По этой причине появление электродвигателей стало важнейшим событием в развитии человеческой цивилизации. Именно эти устройства понесли на себе весь груз промышленного производства. Это и обеспечило, в конце концов, так называемую научно-техническую революцию. В любых электрических движках в основу конструкции положено открытие взаимодействия проводов с проходящим по ним электрическим током.
О том, какие результаты были достигнуты за время, прошедшее с этого открытия, и будет рассказано нашим читателям. Напомним, что взаимодействие запитанных электротоком проводов обнаружил Андре Ампер в 1820 году. После этого события была создана конструкция, способная усилить это взаимодействие — соленоид. Катушка с ферромагнитным сердечником при сближении с постоянным магнитом или другой аналогичной катушкой воздействовала на них со значительным усилием. Поэтому оставалось только придумать такое конструктивное решение, которое позволит максимально увеличить взаимодействие соленоидов и придаст ему необходимое направление.
Превращение электроэнергии в механическую работу
Два соленоида могут либо притягиваться, либо отталкиваться. Их взаимодействие определяется полюсами. Одноименные — отталкиваются, разноименные — притягиваются. Поэтому не составляет особого труда догадаться о конструктивном решении, позволяющем получить вращение вала:
- Вал и соленоид объединяются в жесткую конструкцию. Соленоид располагается так, чтобы создаваемые силовые линии магнитного поля были перпендикулярны оси вращения вала. Полученный элемент двигателя называется ротором, а также индуктором.
- Вокруг ротора располагаются несколько других соленоидов для его притяжения. Чтобы направление было явно задано, а вращение равномерно, их должно быть как минимум три. Полученный элемент движка называется статором.
- Статор или ротор в разных конструкциях моторов могут также иметь название якорь. Суть якоря электрического двигателя заключена в его сходстве со своим корабельным тезкой. Для корабельного якоря характерна прикрепленная цепь, соединяющая его с кораблем. А строение якоря электрического движка включает в себя либо ротор, либо статор, а также присоединенный к нему электрический шнур. Он используется для подключения к источнику питания. То есть вместо якоря с цепью получается ротор или статор со шнуром питания — в этом и заключено их сходство и происхождение названия элемента движка.
- Статор состоит из стальных пластин, которые уменьшают потери электроэнергии, создаваемые вихревыми токами. В результате получается конструкция из обмоток с сердечниками, охватывающая ротор. Они образуют отверстие цилиндрической формы. В него входит цилиндрический ротор с некоторым зазором относительно статора. Такая конструкция электрических двигателей самая распространенная.
 Классическая конструкция электродвигателя — ротор внутри статора
Классическая конструкция электродвигателя — ротор внутри статораОднако для решения некоторых задач необходимо применение иных конструкций. Это может быть, например, расположение ротора снаружи статора или отсутствие вала по причине линейного перемещения элементов двигателя относительно друг друга.
 Электродвигатель с внешним ротором
Электродвигатель с внешним роторомПростейшим линейным двигателем является электромагнит с втягивающимся сердечником. Для того чтобы более точно управлять перемещением подвижной части линейного движка, в нем используется необходимое число взаимодействующих магнитных элементов. Электромагнитами могут быть либо все, либо их часть — это постоянные магниты.
 Линейный электродвигатель
Линейный электродвигательКак видно из рассмотренных примеров, принцип работы электродвигателя использует магнитные поля. Они — следствие как постоянного тока, так и переменного. Но в любом случае принцип действия электродвигателя — это переход электроэнергии в энергию движения.
Далее рассмотрим, как работает электродвигатель, изготовленный соответственно напряжению электропитания — постоянному или переменному.
Электропитание источником переменного напряжения
Двигатель переменного тока наиболее широко используется. Это обусловлено переменным напряжением в большинстве электросетей. Электродвигатели переменного тока подключаются к ним с использованием минимального количества дополнительных устройств. Для любого из приборов надежность и долговечность являются главными качествами. Для этого конструкция должна иметь минимум потенциально уязвимых элементов. Наиболее значимыми из них являются контакты. Меньше контактов — больше надежности.
Устройство и принцип работы электродвигателя с максимальной надежностью основаны на явлении электромагнитной индукции. Это явление используется в трансформаторах. Создание гальванически развязанных электрических цепей — это их важнейшее назначение. Аналогично создаются гальванически развязанные статорные и роторные цепи. Под напряжением пребывают только обмотки статора. Возникающая в роторе электромагнитная индукция приводит к взаимодействию магнитных полей. Но принцип работы электродвигателя переменного тока — это не только индукция. Кроме нее должно существовать условие, обеспечивающее возникновение однонаправленной силы, без которой вращение невозможно. Для этого необходимо пространственное перемещение электромагнитного поля.
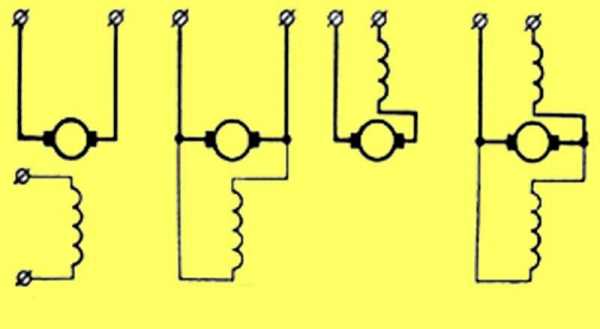
С этой целью устройство электродвигателя переменного тока предусматривает одно из следующих конструктивных решений:
- использование однофазного источника переменного напряжения с фазосдвигающим элементом с двумя парами полюсов;
- подключение к трехфазному источнику питания обмоток статора с тремя парами полюсов;
- применение коммутатора, переключающего взаимодействующие обмотки.
Движимые перемещающимся магнитным полем
Электродвигатель, принцип работы которого определяет электромагнитная индукция, работает следующим образом. В его роторе отсутствуют контакты. Переменное магнитное поле с максимумом, перемещающимся вокруг ротора, вызывает в нем токи, создающие собственное электромагнитное поле. Существование этих токов возможно только при отставании ротора от движущегося максимума электромагнитного поля статора.
Иначе не получится электромагнитной индукции, условием которой является пересечение силовых линий и проводника. Движки, в которых скорости перемещения поля статора и ротора отличаются друг от друга, называются асинхронными. Асинхронный электродвигатель, устройство которого показано далее, в основном имеет одинаковую конструкцию статора, но разные варианты исполнения ротора.
 Принцип работы асинхронного двигателя
Принцип работы асинхронного двигателяСамыми распространенными являются короткозамкнутый ротор и другая его конструкция, именуемая «беличьей клеткой». В последнем варианте ротора получается более эффективная индукция. Однако и конструкция при этом менее технологичная. Но в этих двух разновидностях асинхронного двигателя лишь один недостаток — большой пусковой ток.
Разновидности асинхронного двигателяЧтобы регулировать процесс пуска, потребовалась третья конструкция ротора, называемая «фазной». Но если где-то прибыло, значит, где-то и убыло. У фазного ротора появились контакты — кольца и щетки. А контакты — главная проблема электротехники. Выигрывая в экономичности, проигрываем в долговечности и эксплуатационных расходах. За щетками и кольцами необходим уход и периодическая замена, в результате чего фазный ротор применяется намного реже. Появление мощных полупроводниковых приборов делает возможным регулировку любого асинхронного двигателя в пределах коммутационных возможностей этих приборов. Поэтому сегодня фазный ротор — это архаичная конструкция.
 Фазный ротор
Фазный роторНо если ротор изготовить из специального материала, который обладает некоторой остаточной намагниченностью, скорости поля статора и вращения ротора станут одинаковыми. Под воздействием статора в роторе такого движка из-за свойств его материала не могут возникать токи с величиной, достаточной для движения. Но это и не нужно. Материал способен многократно усиливать внешнее электромагнитное поле и становиться постоянным магнитом. И такой магнитный ротор будет тянуться за электромагнитным полем статора. Такой двигатель называется синхронно-гистерезисным.
 Элементы синхронно-гистерезисного движка
Элементы синхронно-гистерезисного движкаК сожалению, гистерезисный ротор имеет высокую себестоимость материала. А поскольку мощность движка напрямую связана с его размерами, большие и мощные синхронные двигатели с гистерезисным ротором из-за его высокой цены не производятся. Вместо этого делается постоянный электромагнит с питанием через кольца. Так менее надежно, но гораздо дешевле.
 Синхронный двигатель
Синхронный двигательСкорость вращения синхронных и асинхронных движков определяет частота напряжения питания и число пар полюсов. Эта особенность — их большой недостаток. Ведь частота электросети составляет 50–60 Гц, и без применения дополнительного оборудования, через которое придется подключать двигатель, изменить ее невозможно. А это значительно усложняет и удорожает установку. По этой причине в управляемом электроприводе для возможности широкого диапазона регулирования оборотов применяется другой двигатель, о котором будет рассказано далее.
Коллекторные двигатели
Чтобы разобраться в том, как работает электромотор с коллектором, надо обратиться к опытам с рамкой, расположенной между полюсами магнитов. Это классический опыт для демонстрации взаимодействия проводника с током и магнитного поля. На изображениях далее наглядно показан результат этого взаимодействия.
 Коллекторные двигатели
Коллекторные двигателиНо сила, вращающая рамку, зависит от ее положения относительно полюсов. По мере вращения она постепенно уменьшается. И по этой причине рамка останавливается. Чтобы вращение продолжалось, для конкретной конструкции рамки с магнитами потребуется больше рамок. При этом каждая из них подключается к своей паре скользящих контактов. Они образуются парой щеток и парой пластин — ламелей.
Движок, в котором реализован принцип вращения рамки в магнитном поле, содержит ротор с большим числом обмоток — рамок. Ламели собраны в специальном конструктивном элементе — коллекторе. Если магнитное поле создается постоянными магнитами, вращение возможно только при постоянном напряжении на щетках коллектора. Это и есть двигатель постоянного тока (сокращенно ДПТ).
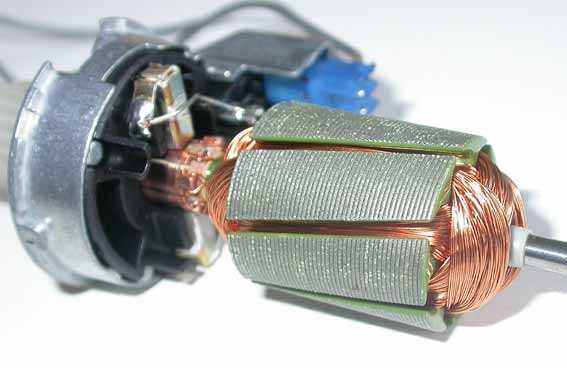
 Ротор ДПТ (а также универсального движка)
Ротор ДПТ (а также универсального движка)Скорость вращения ротора этого движка зависит только от напряжения на щетках коллектора. Если вместо постоянного магнита применить электромагнит, получится универсальный мотор, способный работать как при постоянном, так и при переменном напряжении. Полярность статора и ротора будет изменяться одновременно, сохраняя направление действия силы, вращающей ротор. Универсальный мотор — это тот самый движок, который широко применяется в регулируемых приводах.
 Пояснение принципа работы униполярного двигателя
Пояснение принципа работы униполярного двигателяРазновидностью ДПТ и универсального двигателя можно считать униполярный движок. У его конструкции нет коллектора, но есть щетки. Появление мощных полупроводниковых приборов позволило создавать роторы без колец и коллекторов. Но при этом принцип работы электродвигателя не изменился.
Похожие статьи:domelectrik.ru
Электродвигатель. Виды и применение. Работа и устройство
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.
Назначение и применение электродвигателей
Электрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Классификация электродвигателей
Электродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента:
• гистерезисные;
• магнитоэлектрические. - Строению крепления:
• с горизонтальным расположением вала;
• с вертикальным размещением вала. - Защите от действий внешней среды:
• защищённые;
• закрытые;
• взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
Особенности магнитоэлектрических двигателей постоянного тока
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные. В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
- Выделяют следующие виды самовозбуждения двигателей:
• параллельное;
• последовательное;
• смешанное. - Коллекторные устройства имеют несколько минусов:
• Низкая надёжность приборов.
• Щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя. - Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п.
Применение, плюсы и минусы электродвигателей постоянного тока
Электромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
Электродвигатель переменного тока
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки.
Электродвигатели по принципу работы бывают синхронными и асинхронными. Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля.
Синхронный электродвигатель
Из-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
- Реактивный.
- Шаговый.
- Реактивно-гистерезисный.
- С постоянными магнитами.
- С обмотками возбуждения.
- Вентильный реактивный.
- Гибридно-реактивный синхронный двигатель.
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров.
Достоинства синхронных двигателей:
- Стабильность частоты вращения, что не зависит от механических нагрузок на валу.
- Низкая чувствительность к скачкам напряжения.
- Могут выступать в роли генератора мощности.
- Снижают потребление мощности, предоставляемой электростанциями.
Недостатки в синхронных устройствах:
- Сложности с запуском.
- Сложность конструкции.
- Затруднения в регулировки частоты вращения.
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование.
Асинхронный электродвигатель
Статор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора.
По конструктивным особенностям выделяют два вида асинхронных двигателей:
- С фазным ротором.
- С короткозамкнутым ротором.
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
- Однофазные. Этот тип двигателей самостоятельно не запускается, ему требуется стартовый толчок. Для этого применяется пусковая обмотка либо фазосдвигающая цепь. Также приборы запускаются вручную.
- Двухфазные. В этих устройствах присутствуют две обмотки со смещёнными на угол фазами. В приборе возникает вращающееся магнитное поле, напряженность которого в полюсах одной обмотки нарастает и синхронно спадает в другой.
Двухфазный электродвигатель может самостоятельно запускаться, но с реверсом присутствуют сложности. Часто этот тип устройств подключают к однофазным сетям, включая вторую фазу через конденсатор. - Трехфазные. Достоинством этих типов электродвигателей является легкий реверс. Основные части двигателя – это статор с тремя обмотками и ротор. Позволяет плавно регулировать скорость ротора. Эти приборы довольно востребованы в промышленности и технике.
- Многофазные. Состоят эти устройства из встроенной многофазной обмотки в пазах статора на его внутренней поверхности. Эти двигатели гарантируют высокую надёжность при эксплуатации и считаются усовершенствованными моделями двигателей.
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах.
Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
- Простота производства.
- Высокая надёжность.
- Не нуждаются в преобразователях для включения в сеть.
- Небольшие расходы при эксплуатации.
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
- Невысокий коэффициент мощности.
- Трудность в точной регулировке скорости.
- Маленький пусковой момент.
- Зависимость от напряжения сети.
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы.
Похожие темы:
electrosam.ru
Электрический двигатель: основные принципы действия электродвигателей
Принцип работы электродвигателя основан на использовании эффекта электромагнитной индукции. Само устройство предназначено для создания механической энергии за счёт использования электрических полей. Тип и мощность получаемой энергии зависят от способа взаимодействия магнитных полей и собственно устройства электродвигателя. В зависимости от типа используемого напряжения двигатели классифицируют на постоянного и переменного тока.
Электродвигатели
Электродвигатель постоянного тока
Принцип действия этих двигателей основан на использования постоянных магнитных полей, создаваемых в корпусе устройства. Для их создания служит либо постоянный магнит, закреплённый на корпусе, либо электромагниты, расположенные по периметру ротора.
Основным отличием двигателей постоянного тока является наличие в их корпусе постоянно действующего магнита, закреплённого на корпусе машины. Мощность электродвигателя зависит от этого магнита, точнее от его поля. Магнитное поле в якоре создаётся при подключении к нему постоянного тока. Но для этого необходимо, чтобы полюса постоянного магнитного поля якоря менялись местами. Для этого используются специальные коллекторно-щёточные устройства. Они устроены в виде кольца-коллектора, зафиксированного на валу движка и подключённого к обмотке якоря. Кольцо разделено на сектора, разделённые диэлектрическими вставками. Соединение сектора коллектора с цепью якоря создаётся через скользящие по нему графитные щетки. Для более плотного контакта щётки прижимаются к кольцу коллектора пружинами. Графит применяется ввиду своей скользящей способности, высокой теплопроводности и мягкости. Его применение практически не вредит проводникам коллектора.
При большой мощности электромоторов постоянного тока использование постоянного магнита неэффективно из-за большого веса такого устройства и низкой мощности создаваемого постоянным магнитом поля. Для создания магнитного поля статора в этом случае используется конструкция из ряда катушечных электромагнитов, подключённых к отрицательной или положительной линии питания. Одноименные полюсы подключаются последовательно, их количество составляет от одного до четырёх, количество щёток соответствует количеству полюсов, но, в общем, конструкция якоря практически идентична вышеописанной.
Для упрощения запуска электрического двигателя используют два варианта возбуждения:
- параллельное, при этом рядом с обмоткой якоря включается независимая регулируемая линия, используется для плавного регулирования оборотов вала;
- последовательное возбуждение, что говорит о способе подключения дополнительной линии, в этом случае существует возможность резкого наращивания количества оборотов или его снижения.
Нужно отметить, что этот тип моторов имеет регулируемую частоту оборотов, что достаточно часто используется в промышленности и транспорте.
Интересно. В станках используются двигатели с параллельным возбуждением, что позволяет использовать регулировку количества оборотов, в то же время для грузоподъёмного оборудования подходит последовательное возбуждение. Даже эта особенность двигателей поставлена на службу человечеству.
Двигатель постоянного тока
Электродвигатель переменного тока
Устройство и принцип действия электродвигателя переменного тока впервые описал и запатентовал физик Никола Тесла, патент Великобритании за номером 6481. Но этот мотор не получил широкого распространения из-за низких пусковых характеристик, не смог найти решение пуска. Нужно отметить, что Тесла являлся основным апологетом развития этого типа двигателей, в отличие от Эдисона, который как раз ратовал за использование сетей постоянного тока.
Именно Тесла открыл явление, которое получило название сдвиг фаз, и предложил использовать его в электродвигателе, кроме того он опытным путём определил его наиболее эффективное значение в 90°. Кроме того, знаменитый физик обосновал использование вращающего магнитного поля в многофазных системах.
Но в 1890 году инженер М.О. Доливо-Добровольский создаёт первый рабочий образец асинхронного электродвигателя с якорем «беличье колесо» и с обмоткой статора по периметру окружности. В конструкции этого изделия нашли применение, как работа Никола Теслы, так и труды других инженеров и изобретателей. Справедливости ради нужно отметить, что элементы по отдельности были изобретены раньше, М. Доливо-Добровольский только совместил их в работоспособное устройство.
Вращающее магнитное поле, энергию которого использует этот тип электромотора, возникает в тройной обмотке статора, при подключении его к источнику тока. Ротор такого двигателя представляет собой металлический цилиндр, не имеющий обмотки. Магнитное поле статора за счёт объединения в короткозамкнутую систему с ротором возбуждает в нем токи. Они вызывают создание собственного магнитного поля якоря, которое, соединившись с вихревым полем статора, вызывает вращение ротора и объединённого с ним вала двигателя вокруг своей оси.
Название асинхронный двигатель получил из-за того, что поля не синхронизированы, магнитное поле статора имеет одинаковую скорость с полем якоря, но по фазе отстаёт от него.
Для запуска асинхронного электромотора требуются довольно значительные значения пусковых токов, это заметно и в реальности – при запуске в сеть станка или другого потребителя с таким мотором свет ламп накаливания зачастую мигает из-за падения напряжения в сети. Для упрощения пуска используют фазный ротор, это устройство якоря обычно используется в высокопроизводительных электродвигателях. Фазный ротор, в отличие от обычного, имеет на корпусе три обмотки, объединённые в «звезду». В отличие от статора, они не подключены к энергоисточнику, а соединены со стартовым устройством. Подключение устройства в сеть характеризуется падением сопротивления до нулевых значений. В результате двигатель запускается ровно и работает без перегрузки. Работа такого мотора довольно сложно регулируется, в отличие от моторов постоянного тока.
Интересно. Использование электромоторов переменного тока продвигал знаменитый Никола Тесла, в то время как энергию постоянного тока – не менее знаменитый Эдисон. В результате этого между двумя известнейшими учёными возник конфликт, продлившийся до самой смерти.
Двигатель переменного тока
Линейные электродвигатели
Для ряда устройств требуется не вращательное движение вала движка, а его возвратно-поступательное движение. Для того чтобы удовлетворить требования промышленников, конструкторами были разработаны и линейные электродвигатели. Понятно, что можно использовать для перехода вращательного движения в поступательное различные редукторы и коробки передач, но это усложняет конструкцию, делает её более дорогой, а также снижает её эффективность.
Статор и ротор такого устройства представляют собой полосы металла, а не кольцо и цилиндр как в традиционных моторах. Принцип действия электродвигателя заключается в возвратно-поступательном движении ротора, которое возможно из-за электромагнитного поля, создаваемого статором с незамкнутой системой магнитопроводов. В самой конструкции при работе генерируется движущееся магнитное поле, которое воздействует на обмотку якоря с коллекторно-щеточным устройством. Возникающее поле смещает ротор только в линейном направлении, без придания ему вращения. Мощность электродвигателя линейного типа ограничена его устройством.
Недостатком этих двигателей являются: сложность их изготовления, достаточно высокая стоимость такого оборудования и низкая эффективность, хотя и выше чем использование вращения через редуктор.
Использование электромоторов переменного тока в однофазной сети
Получить вращающееся магнитное поле статора проще всего в трёхфазной сети, но, несмотря на то, можно использовать асинхронные движки и в однофазной, бытовой сети. Требуется лишь проведение некоторых расчетов и изменение конструкции двигателя.
Формула изменений такова:
- Размещение на статоре движка двух обмоток: стартовой и рабочей;
- Включение в цепь конденсатора позволит сдвинуть по фазе ток в стартовой обмотке 90°. Практически можно сделать так: объединить обмотки трехфазного асинхронного двигателя, две обмотки в одну и установить конденсатор на это соединение.
Этот двигатель будет работать в бытовой сети, но, в отличие от двигателей постоянного тока, этот движок не регулируется по количеству оборотов, кроме того слабо переносит критические нагрузки и имеет меньший КПД. Мощность электродвигателя тоже сравнительно низка и во многом зависит от сети. Трехфазная сеть больше подходит для эксплуатации таких моторов.
В настоящее время электродвигатели широко распространены по всему миру. В числе их достоинств:
- высокое КПД, до 80%;
- высокая мощность двигателя при компактных размерах;
- неприхотливость в обслуживании;
- надежность;
- низкие требования к энергопитанию.
Но в тоже время существует ряд проблем, которые ограничивают их более широкое распространение. Так, например, их мобильность ограничивает источники питания – в настоящее время нет достаточно мощных источников питания, которые смогли бы обеспечить длительную функциональность такого устройства. Единственным исключением из правил является атомный реактор. Гребные электродвигатели подводных лодок и кораблей имеют отличную автономность, но в то же время использование энергоносителей таких размеров невозможно в быту. Ситуацию могли бы исправить графеновые аккумуляторы, но их перспективы пока туманны.
Электромобиль
Видео
Оцените статью:elquanta.ru
Электродвигатель это устройство преобразующее энергию электричества в механическую энергию. Электродвигатели получили широкое распространение, практически во всех сферах повседневной жизни. Прежде чем рассматривать виды электродвигателей, следует кратко остановиться на принципе их работы. Все действие происходит согласно закона Ампера, когда вокруг проволоки, где протекает электрический ток, образуется магнитное поле. При вращении этой проволоки внутри магнита, каждая ее сторона будет поочередно притягиваться к полюсам. Таким образом, будет происходить вращение проволочной петли. Электродвигатели разделяются между собой, в зависимости от применяемого тока, который может быть переменным или постоянным. Электродвигатели переменного токаОсобенностью переменного тока является смена его направления определенное количество раз в течение секунды. Как правило, используется переменный ток с частотой в 50 герц.
При подключении, ток вначале начинает протекать в одном направлении, а, затем, его направление полностью изменяется. Таким образом, стороны петли, получая толчок, притягиваются поочередно к различным полюсам. То есть, фактически, происходит их упорядоченное притягивание и отталкивание. Поэтому, при изменении направления, будет происходить вращение проволочной петли вокруг своей оси. С помощью этих круговых движений происходит преобразование энергии из электрической в механическую. Двигатели переменного тока имеют множество конструкций и представлены самыми разнообразными моделями. Это позволяет широко использовать их не только в промышленности, но и в быту. Электродвигатели постоянного токаПервыми изобретенными двигателями были все-таки устройства постоянного тока. Переменный ток в это время был еще неизвестен. В отличие от переменного, движение постоянного тока осуществляется всегда в одном направлении. Вращение ротора прекращается после того, как произойдет оборот на 90 градусов. Направление магнитного поля совпадает в направлением электротока.
Поэтому, металлическое кольцо, подключенное к источнику постоянного тока, разрезается на две части и носит название кольцевого коммутатора. В начале вращения, протекание тока происходит по первой стороне коммутатора и по проводам. Электроток, протекающий по проволочной петле, создает в ней магнитное поле. При дальнейшем вращении петли, происходит и вращение коммутатора. После прохождения кольцом пустого пространства, происходит его переход на другую часть коммутатора. Далее, происходит эффект переменного электротока, благодаря которому вращение петли продолжается. Все электродвигатели постоянного тока применяются совместно с устройствами переменного тока на производстве и транспорте. Классификация электродвигателей |

electric-220.ru