Всем известно, что пиломатериалы являются продуктами обработки древесины. Зачастую пиломатериал – это доска самых разнообразных сечений. Минимально доска имеет две параллельные грани. Строганные продукты получают при помощи продольной распиловки бревна, его специфической «очистки» от коры и оформления положенного вида исходя из заданных параметров.
17 февраля
Рынок пиломатериалов — тенденции и развитие
Пиломатериалы — это пиленая продукция, которая соответствует определенным параметрам качества и имеет две плоские поверхности, расположенные параллельно друг другу. Изделия из древесины изготавливают из цельного бревна, которое раскраивают и режут продольно или поперечно.
16 февраля
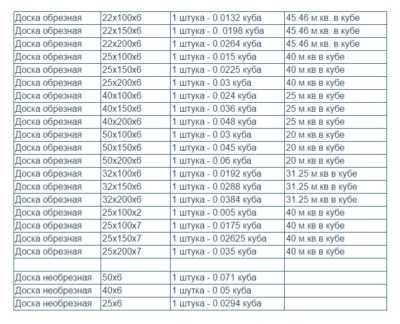
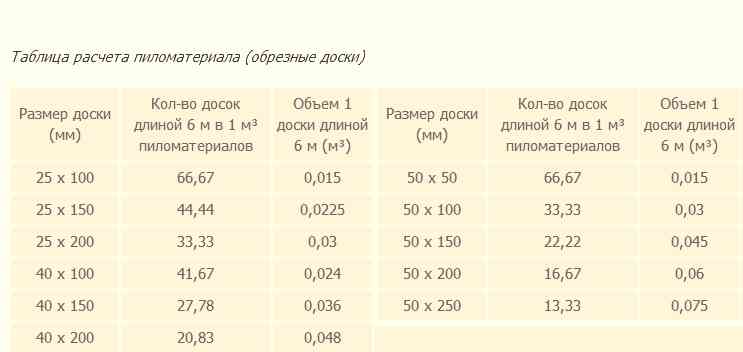
Таблица кубов досок. Таблица кубатуры доски обрезной 3000 мм и 6000 мм. Таблица пересчета доски обрезной 6000 мм. Кубатура досок обрезных.
Раздел недели: Скоропись физического, математического, химического и, в целом, научного текста, математические обозначения. Математический, Физический алфавит, Научный алфавит.
Поиск на сайте DPVA
Поставщики оборудования
Полезные ссылки
О проекте
Обратная связь
Ответы на вопросы.
Оглавление
Таблицы DPVA.ru — Инженерный Справочник
Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация/ / Материалы/ / Древесина. Пиломатериалы. Лесоматериалы. Бревна. Дрова. Кубатура, свойства, плотности… / / Таблица кубов досок. Таблица кубатуры доски обрезной 3000 мм и 6000 мм. Таблица пересчета доски обрезной 6000 мм. Кубатура досок обрезных.
Поделиться:
Таблица кубатуры доски обрезной 3000 мм и 6000 мм.
Таблица пересчета доски обрезной 6000 мм. Кубатура досок обрезных.
Таблица кубатуры доски обрезной 3000 мм и 6000 мм.
Размеры обрезной доски
Объем
одной доски
Штук в 1м3
22*100*6000мм.
0,0132 м3
75 шт.
22*100*3000мм.
0,0066 м3
151 шт.
22*125*6000мм.
0,0165 м3
60 шт.
22*125*3000мм.
0,0082 м3
121 шт.
22*150*6000мм.
0,0198 м3
50 шт.
22*150*3000мм.
0,0099 м3
101 шт.
22*175*6000мм.
0,0231 м3
43 шт.
22*175*3000мм.
0,0115 м3
86 шт.
22*200*6000мм.
0,0264 м3
37 шт.
22*200*3000мм.
0,0132 м3
75 шт.
22*225*6000мм.
0,0297 м3
33 шт.
22*225*3000мм.
0,0148 м3
67 шт.
22*250*6000мм.
0,033 м3
30 шт.
22*250*3000мм.
0,0165 м3
60 шт.
25*100*6000мм.
0,015 м3
66 шт.
25*100*3000мм.
0,0075 м3
133 шт.
25*125*6000мм.
0,0187 м3
53 шт.
25*125*3000мм.
0,0093 м3
106 шт.
25*150*6000мм.
0,0225 м3
44 шт.
25*150*3000мм.
0,0112 м3
88 шт.
25*175*6000мм.
0,0262 м3
38 шт.
25*175*3000мм.
0,0131 м3
76 шт.
25*200*6000мм.
0,03 м3
33 шт.
25*200*3000мм.
0,015 м3
66 шт.
25*225*6000мм.
0,0337 м3
29 шт.
25*225*3000мм.
0,0168 м3
59 шт.
25*250*6000мм.
0,0375 м3
26 шт.
25*250*3000мм.
0,0187 м3
53 шт.
32*100*6000мм.
0,0192 м3
52 шт.
32*100*3000мм.
0,0096 м3
104 шт.
32*125*6000мм.
0,024 м3
41 шт.
32*125*3000мм.
0,012 м3
83 шт.
32*150*6000мм.
0,0288 м3
34 шт.
32*150*3000мм.
0,0144 м3
69 шт.
32*175*6000мм.
0,0336 м3
29 шт.
32*175*3000мм.
0,0168 м3
59 шт.
32*200*6000мм.
0,0384 м3
26 шт.
32*200*3000мм.
0,0192 м3
52 шт.
32*225*6000мм.
0,0432 м3
23 шт.
32*225*3000мм.
0,0216 м3
46 шт.
32*250*6000мм.
0,048 м3
20 шт.
32*250*3000мм.
0,024 м3
41 шт.
40*100*6000мм.
0,024 м3
41 шт.
40*100*3000мм.
0,012 м3
83 шт.
40*125*6000мм.
0,03 м3
33 шт.
40*125*3000мм.
0,015 м3
66 шт.
40*150*6000мм.
0,036 м3
27 шт.
40*150*3000мм.
0,018 м3
55 шт.
40*175*6000мм.
0,042 м3
23 шт.
40*175*3000мм.
0,021 м3
47 шт.
40*200*6000мм.
0,048 м3
20 шт.
40*200*3000мм.
0,024 м3
41 шт.
40*225*6000мм.
0,054 м3
18 шт.
40*225*3000мм.
0,027 м3
37 шт.
40*250*6000мм.
0,06 м3
16 шт.
40*250*3000мм.
0,03 м3
33 шт.
50*100*6000мм.
0,03 м3
33 шт.
50*100*3000мм.
0,015 м3
66 шт.
50*125*6000мм.
0,0375 м3
26 шт.
50*125*3000мм.
0,0187 м3
53 шт.
50*150*6000мм.
0,045 м3
22 шт.
50*150*3000мм.
0,0225 м3
44 шт.
50*175*6000мм.
0,0525 м3
19 шт.
50*175*3000мм.
0,0262 м3
38 шт.
50*200*6000мм.
0,06 м3
16 шт.
50*200*3000мм.
0,03 м3
33 шт.
50*225*6000мм.
0,0675 м3
14 шт.
50*225*3000мм.
0,0337 м3
29 шт.
50*250*6000мм.
0,075 м3
13 шт.
50*250*3000мм.
0,0375 м3
26 шт.
60*100*6000мм.
0,036 м3
27 шт.
60*100*3000мм.
0,018 м3
55 шт.
60*125*6000мм.
0,045 м3
22 шт.
60*125*3000мм.
0,0225 м3
44 шт.
60*150*6000мм.
0,054 м3
18 шт.
60*150*3000мм.
0,027 м3
37 шт.
60*175*6000мм.
0,063 м3
15 шт.
60*175*3000мм.
0,0315 м3
31 шт.
60*200*6000мм.
0,072 м3
13 шт.
60*200*3000мм.
0,036 м3
27 шт.
60*225*6000мм.
0,081 м3
12 шт.
60*225*3000мм.
0,0405 м3
24 шт.
60*250*6000мм.
0,09 м3
11 шт.
60*250*3000мм.
0,045 м3
22 шт.
75*100*6000мм.
0,045 м3
22 шт.
75*100*3000мм.
0,0225 м3
44 шт.
75*125*6000мм.
0,0562 м3
17 шт.
75*125*3000мм.
0,0281 м3
35 шт.
75*150*6000мм.
0,0675 м3
14 шт.
75*150*3000мм.
0,0337 м3
29 шт.
75*175*6000мм.
0,0787 м3
12 шт.
75*175*3000мм.
0,0393 м3
25 шт.
75*200*6000мм.
0,09 м3
11 шт.
75*200*3000мм.
0,045 м3
22 шт.
75*225*6000мм.
0,1012 м3
9 шт.
75*225*3000мм.
0,0506 м3
19 шт.
75*250*6000мм.
0,1125 м3
8 шт.
75*250*3000мм.
0,0562 м3
17 шт.
Таблица пересчета доски обрезной 6000 мм.
Размер одной доски, мм
Досок
(шт.) в одном м3
Погонных метров в одном м3
Объём одной доски,м3
Площадь одной доски, м2
Масса доски, кг (при влажности 20%)
20*100*6000мм
83,3
500
0,012
0,6
9
20*150*6000мм
55,6
333,3
0,018
0,9
13,5
22*125*6000мм
60,6
363,6
0,0165
0,75
12,375
22*150*6000мм
50,5
303
0,0198
0,09
14,85
22*175*6000мм
43,3
259,7
0,0231
1,05
17,325
22*200*6000мм
37,9
227,3
0,0264
1,2
19,8
22*225*6000мм
33,7
202
0,0297
1,35
22,275
22*250*6000мм
30,3
181,8
0,033
1,5
24,75
25*100*6000мм
66,7
400
0,015
0,6
11,25
25*175*6000мм
38,1
228,6
0,02625
1,05
19,69
25*200*6000мм
33,3
200
0,03
1,2
22,5
25*225*6000мм
29,6
177,8
0,03375
1,35
25,31
25*250*6000мм
26,7
160
0,0375
1,5
28,125
32*100*6000мм
52,1
312,5
0,0192
0,6
14,4
32*125*6000мм
41,7
250
0,024
0,75
18
32*150*6000мм
34,7
208,3
0,0288
0,9
21,6
32*175*6000мм
29,8
178,6
0,0336
1,05
25,2
32*200*6000мм
26
156,3
0,0384
1,2
28,8
32*225*6000мм
23,1
138,9
0,0432
1,35
32,4
32*250*6000мм
20,8
125
0,048
1,5
36
40*100*6000мм
41,7
250
0,024
0,6
18
40*125*6000мм
33,3
200
0,03
0,75
22,5
40*150*6000мм
27,8
166,7
0,036
0,9
27
40*175*6000мм
23,8
142,9
0,042
1,05
31,5
40*200*6000мм
20,8
125
0,048
1,2
36
40*225*6000мм
18,5
111,1
0,054
1,35
40,5
40*250*6000мм
16,7
100
0,06
1,5
45
50*100*6000мм
33,3
200
0,03
0,6
22,5
50*125*6000мм
26,7
160
0,0375
0,75
28,125
50*150*6000мм
22,2
133,3
0,045
0,9
33,75
50*175*6000мм
19
114,3
0,0525
1,05
39,375
50*200*6000мм
16,7
100
0,06
1,2
45
50*225*6000мм
14,8
88,9
0,0675
1,35
50,625
50*250*6000мм
13,3
80
0,075
1,5
56,25
Поиск в инженерном справочнике DPVA. Введите свой запрос:
Дополнительная информация от Инженерного cправочника DPVA, а именно — другие подразделы данного раздела:
Поиск в инженерном справочнике DPVA. Введите свой запрос:
Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. Вложите в письмо ссылку на страницу с ошибкой, пожалуйста.
Коды баннеров проекта DPVA.ru Начинка: KJR Publisiers
Консультации и техническая поддержка сайта: Zavarka Team
Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. Free xml sitemap generator
Исследование адаптивного кубатурного фильтра Калмана для тесно интегрированной навигационной системы GPS/БИНС
Оглавление
= 768 && window.innerWidth
Исследование адаптивного кубатурного фильтра Калмана для тесно интегрированной навигационной системы GPS/БИНС
Май 2017 г.
Чен Чжао,
Шуай Чен,
Ипин Ван
Метрики
54
Просмотры
10 загрузок
54 просмотра
//
10 загрузок
Цитата
Чжао, Чен и др. «Исследование адаптивного кубатурного фильтра Калмана для тесно интегрированной навигационной системы GPS / БИНС». Международный журнал инженерных и прикладных наук , том. 4, нет. 5 мая. 2017.
Скачать файл цитирования:
РИС (Mendeley, Zotero, EndNote, RefWorks)
БибТекс (LaTeX)
Посмотреть оригинал
Abstract
С учетом характеристик баллистической ракеты в данной статье исследуется тесно интегрированный навигационный алгоритм GPS/БИНС, основанный на скорости псевдодальности/псевдодальности в инерциальных координатах пуска. Выведен метод преобразования координат из координат ECEF в инерциальные координаты Старта. В этих координатах были выведены уравнение погрешности бесплатформенной инерциальной навигации и уравнение погрешности GPS. Установлены уравнения состояния и уравнения измерений для тесно интегрированной навигационной системы GPS/БИНС. Затем используется адаптивный кубатурный фильтр Калмана (ACKF) для улучшения характеристик положения. Численное моделирование показывает лучшую точность интегрированной навигационной системы и контроль качества контура векторного слежения.
Полный текст
Еще из этого журнала
Метод искусственной нейронной сети для определения высоты смешивания
Кубатурный фильтр Калмана при минимальной энтропии ошибки с опорными точками для интеграции INS/GPS
[1]
Б. Паркинсон, Дж. Спилкер, П. Аксельрад и П. Энге, Глобальная система позиционирования: теория и приложения . Норвуд, Массачусетс, США: Artech House, 2008.
.
[2]
Л. Чанг, Дж. Ли и К. Ли, «Выравнивание на основе оптимизации бесплатформенной инерциальной навигационной системы: сравнение и расширение», IEEE Trans. Аэросп. Электрон. Сист. , том. 52, нет. 4, стр. 1697–1713, август 2016 г. doi: 10.1109/TAES.2016.130824
[3]
Д. Титтертон и Дж. Уэстон, Бесплатформенная инерциальная навигационная технология . Лондон, Великобритания: Инженерно-технологический институт, 2004 г.
[4]
П. Д. Гроувс, Принципы интегрированных GNSS, инерциальных и мультисенсорных навигационных систем . Вашингтон, США: Американский институт аэронавтики и астронавтики, 1996.
.
[5]
М. Гревал, Л. Вейл и А. Эндрюс, Системы глобального позиционирования, инерциальная навигация и интеграция . Хобокен, Нью-Джерси: John Wiley & Sons, 2007.
.
[6]
Ф. Чжао, К. Чен, В. Хе и С. Сэм Ге, «Подход к фильтрации, основанный на MMAE для интегрированной навигационной системы SINS / CNS», IEEE/CAA Journal of Automatica Sinica , vol. 5, нет. 6, стр. 1113–1120, ноябрь 2018 г. doi: 10.1109/JAS.2017.7510445
[7]
Y. Huang, Y. Zhang и L. Chan, «Новый быстрый метод грубой настройки в движении для недорогих SINS с помощью GPS», IEEE/ASME Trans. Мехатроника , вып. 23, нет. 3, pp. 1303–1313, May 2018. doi: 10.1109/TMECH.2018.2835486
[8]
К. Б. Медейрос и М. М. Вандерли, «Многомодельный линейный фильтр Калмана для непредсказуемых сигналов», IEEE Sensors J. , vol. 14, нет. 4, стр. 979–991, апрель 2014 г. doi: 10.1109/JSEN.2013.2291683
[9]
А. Сингх, «Основное развитие гауссовой фильтрации после использования фильтра Калмана без запаха», IEEE/CAA Journal of Automatica Sinica , vol. 7, нет. 5, стр. 1308–1325, сентябрь 2020 г.
[10]
С. Джулиер и Дж. Ульманн, «Новое расширение фильтра Калмана для нелинейных систем», в Проц. 11-й междунар. Симп. Аэрокосмическая/оборонная служба, Simul. Controls , 1997, стр. 182–193.
[11]
К. Х. Ким, Дж. Г. Ли и К. Г. Парк, «Адаптивный двухэтапный расширенный фильтр Калмана для отказоустойчивой слабосвязанной системы INS/GPS», IEEE Trans. Аэросп. Электрон. Сист. , том. 45, нет. 1, стр. 125–137, январь 2009 г. doi: 10.1109/TAES.2009.4805268
[12]
Д. Сан, М. Г. Петовелло и М. Э. Кэннон, «Сверхплотная интеграция GPS/уменьшенный IMU для навигации наземных транспортных средств», IEEE Trans. Аэросп. Электрон. Сист. , том. 49, нет. 3, стр. 1781–1791, июль 2013 г. doi: 10.1109/TAES.2013.6558019
[13]
Дж. Вендел, Дж. Мецгер, Р. Моэникес, А. Майер и Г. Ф. Троммер, «Сравнение производительности тесно связанных систем навигации GPS/ИНС на основе расширенных и сигма-точечных фильтров Калмана», Навигация , том. 53, нет. 1, стр. 21–31, август 2014 г.
[14]
J. Zhou, Y. Yang, J. Zhang, E. Edwan и O. Loffeld, «Сильная связь INS/GPS с использованием фильтра Калмана без запаха на основе кватернионов», в Proc. AIAA Guid., Navigat., Control Conf. , Портленд, штат Орегон, США, 2011 г., стр. 1–14.
[15]
Чанг Л., Ли К. и Ху Б., «Надежный фильтр погрешности процесса на основе оценки M компании Huber для интегрированной системы INS/GPS», IEEE Sensors J. , vol. 15, нет. 6, стр. 3367–3374, июнь 2015 г. doi: 10.1109/JSEN.2014.2384492
[16]
И. Арасаратнам и С. Хайкин, «Кубатурные фильтры Калмана», IEEE Trans. автомат. Контроль , том. 54, стр. 1254–1269, июнь 2009 г. doi: 10.1109/TAC.2009.2019800
[17]
B. Cui, X. Chen и X. Tang, «Улучшенный кубатурный фильтр Калмана для GNSS/INS на основе преобразования апостериорной ошибки сигма-точек», IEEE Trans. Сигнальный процесс. , том. 65, нет. 11, стр. 2975–2987, март 2017 г. doi: 10.1109/TSP.2017.2679685
[18]
Ю. Чжао, «Оценка эффективности кубатурного фильтра Калмана в тесно связанной навигационной системе GPS/IMU», Сигнальный процесс. , том. 119, стр. 67–79, февраль 2016 г. doi: 10.1016/j.sigpro.2015.07.014
[19]
B. Cui, X. Chen, Y. Xu, H. Huang и X. Liu, «Анализ производительности улучшенного повторяющегося кубатурного фильтра Калмана и его применение к GNSS/INS», ISA Trans., том. 66, стр. 460–468, январь 2017 г. doi: 10.1016/j.isatra.2016.09.010
[20]
М. Д. Фам, К. С. Лоу, С. Т. Гох и С. С. Чен, «Расширенный фильтр Калмана с планированием усиления для системы определения ориентации наноспутников», IEEE Trans. Аэросп. Электрон. Сист. , том. 51, нет. 2015. Т. 2. С. 1017–1028. doi: 10.1109/TAES.2014.130204
[21]
С. В. Бордонаро, П. В., Ю. Бар-Шалом и Т. Лугинбул, «Сигма-точечный фильтр Калмана с преобразованными измерениями для бистатического гидролокатора и радиолокационного слежения», IEEE Trans. Аэросп. Электрон. Сист. , том. 55, нет. 1, стр. 147–159, февраль 2019 г. doi: 10.1109/TAES.2018.2849179
[22]
K. Feng, J. Li, X. Zhang, X. Zhang, C. Shen, H. Cao, Y. Yang, and J. Liu, «Улучшенный кубатурный фильтр Калмана с сильным отслеживанием для интегрированных навигационных систем GPS/INS, Датчики , вып. 18, нет. 6, статья № 1919, июнь 2018 г. doi: 10.3390/s18061919
[23]
X. Chen, C. Shen, WB Zhang, M. Tomizuka, Y. Xu и KL Chiu, «Новый гибрид сильного фильтра Калмана и вейвлетной нейронной сети для GPS/INS во время сбоев GPS», Measurement , vol. 46, нет. 10, стр. 3847–3854, декабрь 2013 г. doi: 10.1016/j.measurement.2013.07.016
[24]
Арулампалам М. С., Маскелл С., Гордон Н. и Клапп Т. «Учебное пособие по фильтрам частиц для онлайн-нелинейного/негауссовского байесовского отслеживания», IEEE Trans. Сигнальный процесс. , том. 50, нет. 2, стр. 174–188, февраль 2002 г. doi: 10.1109/78.978374
[25]
X. Liu, H. Qu, J. Zhao и P. Yue, «Кубатурный фильтр Калмана с квадратным корнем максимальной коррентропии с применением к интегрированным системам SINS/GPS», ISA Trans. , том. 80, стр. 195–202, май 2018 г. doi: 10.1016/j.isatra.2018.05.001
[26]
JC Príncipe, Информационно-теоретическое обучение: энтропия Реньи и перспективы ядра , Нью-Йорк, штат Нью-Йорк, США: Springer, 2010.
[27]
Д. Л. Алспах и Х. Соренсон, «Нелинейная байесовская оценка с использованием приближений суммы Гаусса», IEEE Trans. автомат. Контроль , том. 17, нет. 4, стр. 439–448, август 1972 г. doi: 10.1109/ТАЦ.1972.1100034
[28]
Ю. Хуанг и Ю. Чжан, «Новый устойчивый к неопределенности процесса фильтр Калмана на основе t Стьюдента для интеграции SINS/GPS», IEEE Access , vol. 5, стр. 14391–14404, июль 2017 г. doi: 10.1109/ACCESS.2017.2726519
[29]
О. Страка и Я. Дуник, «Стохастическая интеграция Студенческая − t filter», в Proc. 20-й междунар. конф. Инф. Fusion , стр. 1–8, июль 2017 г.
[30]
Ю. Хуанг и Ю. Чжан, «Надежный стохастический кубатурный фильтр Стьюдента на основе t для нелинейных систем с шумами процессов и измерений с тяжелыми хвостами», IEEE Access , vol. 5, нет. 5, стр. 7964–7974, май 2017 г.
[31]
F. Sun и L. Tang, «Кубатурный фильтр частиц», Syst. англ. Электрон. , том. 33, нет. 11, стр. 2554–2557, ноябрь 2011 г.
[32]
B. Cui, X. Chen, X. Tang, H. Huang и X. Liu, «Надежный кубатурный фильтр Калмана для GNSS/INS с отсутствующими наблюдениями и цветным шумом измерений», ISA Trans. , том. 72, стр. 138–146, январь 2018 г. doi: 10.1016/j.isatra.2017.09.019
[33]
Мили Л., Стино Г., Добрака Ф. и Френч Д. Надежный метод оценки для выявления топологических ошибок // IEEE Trans. Система питания , том. 14, нет. 4, стр. 1469–1476, ноябрь 1999 г. doi: 10.1109/59.801932
[34]
Л. Мили и К. В. Коукли, «Надежная оценка в структурированной линейной регрессии», Энн. Статист. , том. 24, нет. 6, стр. 2593–2607, декабрь 1996 г.
.
[35]
Ю. С. Шмалий, «Итеративный алгоритм типа Калмана, игнорирующий шум и начальные условия», IEEE Trans. Сигнальный процесс. , том. 59, нет. 6, стр. 2465–2473, июнь 2011 г. doi: 10.1109/TSP.2011.2129516
[36]
Т. Чиен-Хао, С. Ф. Лин и Дж. Дах-Цзин, «Надежный кубатурный фильтр Калмана на основе Губера для обработки GPS-навигации», J. Navigat , vol. 229, нет. 7, том. 70, стр. 527–546, Otc. 2016.
[37]
К. Ли, Б. Ху, Л. Чанг и Ю. Ли, «Надежный квадрат — кубатурный корневой фильтр Калмана на основе методологии оценки Хубера», Proc. Инст. мех. англ. Г-Дж. воздух , том. 229, нет. 7, стр. 1236–1245, июнь 2015 г. doi: 10.1177/0954410014548698
[38]
А. Сингх и Дж. К. Принсипе, «Использование корретропии как функции стоимости в линейных адаптивных фильтрах», в Proc. Междунар. Совместная конф. Нейронная сеть (IJCNN) , июль 2009 г., стр. 2950–2955.
[39]
Б. Чен, Дж. Ван, Х. Чжао, Н. Чжэн и Дж. К. Принсипи, «Сходимость алгоритма с фиксированной точкой по критерию максимальной коррентропии», IEEE Signal Process. лат. , том. 22, нет. 10, стр. 1723–1727, Otc. 2015. doi: 10.1109/LSP.2015.2428713
[40]
B. Chen, X. Liu, H. Zhao, JC Príncipe, «Максимальный корретропный фильтр Калмана», Automatica , vol. 76, стр. 70–77, февраль 2017 г. doi: 10.1016/j.automatica.2016.10.004
[41]
Х. Ван, Х. Ли, Дж. Цзо, В. Чжан и Х. Ван, «Надежный фильтр Калмана без производной максимальной корретропии и сглаживатель», Доступ IEEE , том. 6, стр. 70794–70807, ноябрь 2018 г. doi: 10.1109/ACCESS.2018.2880618
[42]
С. Ван, С. Инь, Г. Цянь, Ю. Фэн, С. Кай и Л. Ван, «Кубатурный фильтр Калмана с максимальной корретропией, основанный на статистической линейной регрессии», C.N. Патент, 106487358 A, 8 марта 2017 г. [Онлайн]. Доступно: https://ieeexplore.ieee.org/document/9546666.
[43]
Б. Чен, Л. Син, Б. Сюй, Х. Чжао и Дж. К. Принсипи, «Понимание надежности оценки энтропии с минимальной ошибкой», IEEE Trans. Нейронная сеть. Учиться. Сист. , том. 29, нет. 3, стр. 731–737, март 2018 г. doi: 10.1109/TNNLS.2016.2636160
[44]
Д. Эрдогмус и Дж. К. Принсипе., «Минимизация энтропии ошибки для контролируемого обучения нелинейных адаптивных систем», IEEE Trans. Сигнальный процесс. , том. 50, нет. 7, стр. 1780–1786, июль 2002 г. doi: 10.1109/TSP.2002.1011217
[45]
Y. Zhang, B. Chen, X. Liu, Z. Yuan и JC Príncipe, «Сходимость алгоритма энтропии минимальной ошибки с фиксированной точкой», Entropy , vol. 17, нет. 8, стр. 5549–5560, август 2015 г.
[46]
Б. Чен, Л. Данг, Ю. Гу, Н. Чжэн и Дж. К. Принцип, «Энтропийный фильтр Калмана с минимальной ошибкой», IEEE Trans. Сист. , Человек , Кибер. , Сист. , том. 51, нет. 9, стр. 5819–5829, сентябрь 2021 г.
[47]
Лю В., Похарел П. П. и Принсипи Дж. К., «Энтропия ошибок, коррентропия и М-оценка», в Proc. 16-й семинар IEEE по машинному обучению. Сигнальный процесс ., 2006, стр. 179–184.
[48]
Дж. Чжао и Л. Мили, «Надежный фильтр Калмана с обобщенным максимальным правдоподобием для оценки динамического состояния энергосистемы», IEEE J. Sel. Темы Сигнальный процесс. , том. 12, нет. 4, стр. 578–592, август 2018 г. doi: 10.1109/JSTSP.2018.2827261
[49]
К. Андреу и В. Каратанасси, «Оценка количества конечных элементов с использованием надежного метода обнаружения выбросов», IEEE J. Сел. Темы Наблюдение за Землей. Дистанционный датчик , том. 7, нет. 1, стр. 247–256, январь 2014 г. doi: 10.1109/JSTARS.2013.2260135
[50]
B. Chen, X. Wang, Y. Li, and JC Príncipe, «Критерий максимальной корретропии с переменным центром», IEEE Signal Process. лат. , том. 26, нет. 8, стр. 1212–1216, август 2019 г. doi: 10.1109/LSP.2019.2925692
[51]
Б. Чен, С. Ван, З. Юань, П. Рен и Дж. Цинь, «Многоядерная корретропия для надежного обучения», [онлайн]. Доступно: https://ieeexplore.ieee.org/document/9546666. Дата обращения: 15 октября 2021 г.
 07 куба
07 куба 0198 куба
0198 куба 048 куба
048 куба 005 куба
005 куба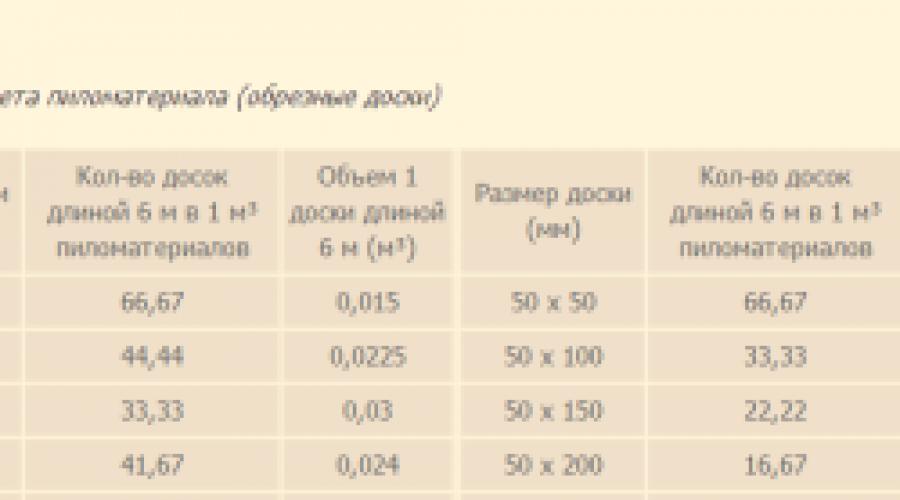 0033 куба
0033 куба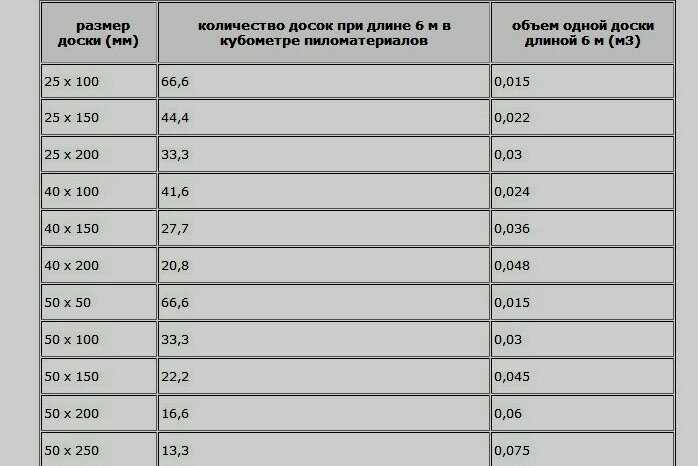 0075 куба
0075 куба Зачастую пиломатериал – это доска самых разнообразных сечений. Минимально доска имеет две параллельные грани. Строганные продукты получают при помощи продольной распиловки бревна, его специфической «очистки» от коры и оформления положенного вида исходя из заданных параметров.
Зачастую пиломатериал – это доска самых разнообразных сечений. Минимально доска имеет две параллельные грани. Строганные продукты получают при помощи продольной распиловки бревна, его специфической «очистки» от коры и оформления положенного вида исходя из заданных параметров. Free xml sitemap generator
Free xml sitemap generator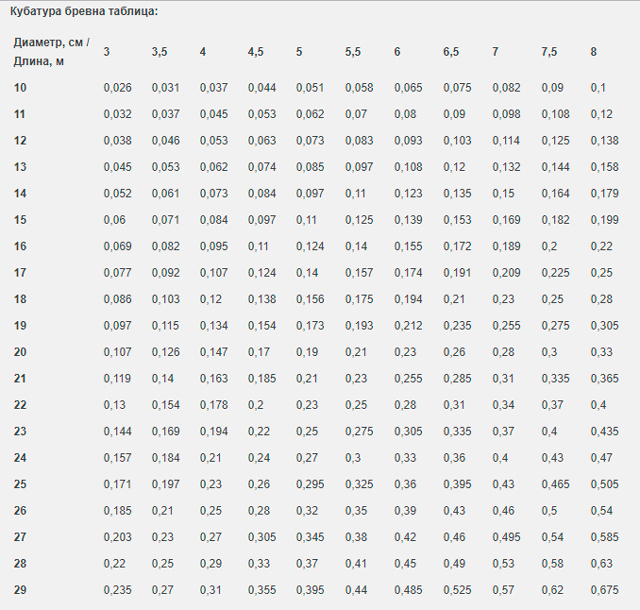 Математический, Физический алфавит, Научный алфавит.
Математический, Физический алфавит, Научный алфавит. Таблица пересчета доски обрезной 6000 мм. Кубатура досок обрезных.
Таблица пересчета доски обрезной 6000 мм. Кубатура досок обрезных.










 Введите свой запрос:
Введите свой запрос: 4, нет. 5 мая. 2017.
4, нет. 5 мая. 2017. Численное моделирование показывает лучшую точность интегрированной навигационной системы и контроль качества контура векторного слежения.
Численное моделирование показывает лучшую точность интегрированной навигационной системы и контроль качества контура векторного слежения.
 Паркинсон, Дж. Спилкер, П. Аксельрад и П. Энге, Глобальная система позиционирования: теория и приложения . Норвуд, Массачусетс, США: Artech House, 2008.
Паркинсон, Дж. Спилкер, П. Аксельрад и П. Энге, Глобальная система позиционирования: теория и приложения . Норвуд, Массачусетс, США: Artech House, 2008. Гревал, Л. Вейл и А. Эндрюс, Системы глобального позиционирования, инерциальная навигация и интеграция . Хобокен, Нью-Джерси: John Wiley & Sons, 2007.
Гревал, Л. Вейл и А. Эндрюс, Системы глобального позиционирования, инерциальная навигация и интеграция . Хобокен, Нью-Джерси: John Wiley & Sons, 2007. doi: 10.1109/JSEN.2013.2291683
doi: 10.1109/JSEN.2013.2291683 Аэросп. Электрон. Сист. , том. 49, нет. 3, стр. 1781–1791, июль 2013 г. doi: 10.1109/TAES.2013.6558019
Аэросп. Электрон. Сист. , том. 49, нет. 3, стр. 1781–1791, июль 2013 г. doi: 10.1109/TAES.2013.6558019 doi: 10.1109/JSEN.2014.2384492
doi: 10.1109/JSEN.2014.2384492 , том. 66, стр. 460–468, январь 2017 г. doi: 10.1016/j.isatra.2016.09.010
, том. 66, стр. 460–468, январь 2017 г. doi: 10.1016/j.isatra.2016.09.010 18, нет. 6, статья № 1919, июнь 2018 г. doi: 10.3390/s18061919
18, нет. 6, статья № 1919, июнь 2018 г. doi: 10.3390/s18061919 doi: 10.1016/j.isatra.2018.05.001
doi: 10.1016/j.isatra.2018.05.001 Fusion , стр. 1–8, июль 2017 г.
Fusion , стр. 1–8, июль 2017 г. Система питания , том. 14, нет. 4, стр. 1469–1476, ноябрь 1999 г. doi: 10.1109/59.801932
Система питания , том. 14, нет. 4, стр. 1469–1476, ноябрь 1999 г. doi: 10.1109/59.801932 Инст. мех. англ. Г-Дж. воздух , том. 229, нет. 7, стр. 1236–1245, июнь 2015 г. doi: 10.1177/0954410014548698
Инст. мех. англ. Г-Дж. воздух , том. 229, нет. 7, стр. 1236–1245, июнь 2015 г. doi: 10.1177/0954410014548698 Ван, Х. Ли, Дж. Цзо, В. Чжан и Х. Ван, «Надежный фильтр Калмана без производной максимальной корретропии и сглаживатель», Доступ IEEE , том. 6, стр. 70794–70807, ноябрь 2018 г. doi: 10.1109/ACCESS.2018.2880618
Ван, Х. Ли, Дж. Цзо, В. Чжан и Х. Ван, «Надежный фильтр Калмана без производной максимальной корретропии и сглаживатель», Доступ IEEE , том. 6, стр. 70794–70807, ноябрь 2018 г. doi: 10.1109/ACCESS.2018.2880618 Сигнальный процесс. , том. 50, нет. 7, стр. 1780–1786, июль 2002 г. doi: 10.1109/TSP.2002.1011217
Сигнальный процесс. , том. 50, нет. 7, стр. 1780–1786, июль 2002 г. doi: 10.1109/TSP.2002.1011217 Sel. Темы Сигнальный процесс. , том. 12, нет. 4, стр. 578–592, август 2018 г. doi: 10.1109/JSTSP.2018.2827261
Sel. Темы Сигнальный процесс. , том. 12, нет. 4, стр. 578–592, август 2018 г. doi: 10.1109/JSTSP.2018.2827261