Управляющие сигналы в системах с ЧПУ. Протокол STEP/DIR
Наиболее распространенным протоколом на текущий момент является «шаг-направление» (варианты названия: STEP/DIR, PULSE/DIR, PUL/DIR, CP/DIR). Некоторые hi-end станки используют собственные проприетарные цифровые или аналоговые протоколы, но зачастую это все равно вариации на тему формата STEP/DIR. Данные сигналы генерируются контроллером(в роли которого часто выступает компьютер) при выполнении управляющей программы на высокоуровневом языке (обычно G-код).
Название протокола STEP/DIR говорит само за себя — привод с ЧПУ получает команду из двух частей.
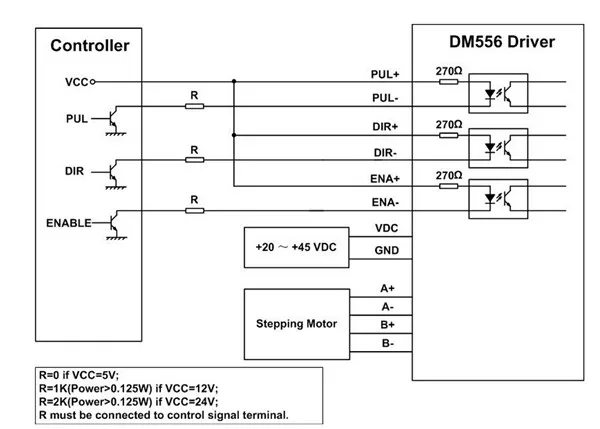
Одна часть предписывает приводу сделать шаг, вторая часть говорит, в каком направлении шаг должен быть сделан. На физическом уровне сигналы представляют собой прямоугольные импульсы амплитудой 5 В, которые, например, могут генерироваться компьютером на контактах LPT-порта(часто такие сигналы называюют ТТЛ-совместимыми сигналами). Т.е. управляющие сигналы для привода выглядят как последовательность чередующихся уровней напряжения 0 В и +5В, представляющих логические 0 и 1 соответственно. Сигнал такого рода явлется разновидностью ШИМ-сигнала, в котором ширина импульса интерпретируется драйвером как 0 или 1. Поскольку все драйверы и контроллеры разные, очень важно понимать как работает протокол STEP/DIR.
Т.е. управляющие сигналы для привода выглядят как последовательность чередующихся уровней напряжения 0 В и +5В, представляющих логические 0 и 1 соответственно. Сигнал такого рода явлется разновидностью ШИМ-сигнала, в котором ширина импульса интерпретируется драйвером как 0 или 1. Поскольку все драйверы и контроллеры разные, очень важно понимать как работает протокол STEP/DIR.
Рассмотрим на примере популярного драйвера шагового двигателя Geckodrive G201.
В руководстве сказано, что минимальная длительность логической 1 канала STEP — 4мкс, а логического 0 — 0.5 мкс. Посмотрим на картинку снизу: там изображен сигнал, соответствующий минимальным требованиям. Аналогичные требования указаны и для сигнала направления, только минимальная длительность уже будет 1 мкс. Если входящие сигналы будут удовлетворять указанным требованиям, то при поступлении каждой логической единицы по каналу STEP драйвер распознает её и сделает шаг, тогда как состояние канала DIR в этот момент задаст направление шага (1 — по, 0 — против часовой стрелки, или наоборот).
Сигналы «шаг» и «направление» посылаются одновременно. Если движения в настоящий момент нет, на канал STEP будет подаваться 0, а DIR обычно меняет уровень сигнала только при смене направления. Почему знать это важно?
Дело в том, что у множества дешевых моделей безымянных производителей заявлены такие же характеристики, что и у hi-end моделей, кроме максимальной входной частоты. Драйвер Geckodrive G201 способен обработать входящие сигналы STEP с частотой 200 кГц, что является весьма неплохим показателем. Во многих случаях, если используется большое деление шага, частоты STEP могут быть очень высокими, и надо понимать, какой драйвер сможет их отработать, а какой спасует гораздо раньше.
Конечно, скорее всего, Вам не понадобятся глубокие знания о протоколах управления приводами с ЧПУ, если только вы не планируете собрать драйверы собственноручно, но понимание принципов пригодится при решении разнообразных проблем со станком.
Контроллер шаговых двигателей с интерфейсом CAN SMSD-4.
 2CAN
2CANЗаказать
Описание в PDF
Технические характеристики
| Напряжение питания, В | 12…48 |
| Максимальный ток фазы, А | до 4.2 |
| Коэффициент дробления полного шага | до 1/128 |
| Коммуникационный интерфейс | CAN, USB |
| Способы управления | CANOpen, STEP/DIR |
| Дискретные входы/выходы | 4 входа 2 выхода |
Описание .pdf 3D модель .step Программа .zip
SMSD‑4.2CAN — контроллер шагового двигателя с токами обмоток до 4.2А. Предназначен для работы под управлением ПЛК по протоколу CANopen. Протокол позволяет вводить пользовательские единицы измерения, а так же учитывать передаточные отношения при использовании редукторов. Абсолютное и относительное задание позиции на перемещение. Протокол CANopen имеет широкий набор инструментов для синхронизации и синхронной работы нескольких контроллеров.
Протокол позволяет вводить пользовательские единицы измерения, а так же учитывать передаточные отношения при использовании редукторов. Абсолютное и относительное задание позиции на перемещение. Протокол CANopen имеет широкий набор инструментов для синхронизации и синхронной работы нескольких контроллеров.
Режимы управления контроллера SMSD‑4.2CAN
Контроллер SMSD‑4.2CAN поддерживает следующие профили согласно протоколу CANopen:
- Режим скорости позволяет поддерживать заданную скорость вращения, а также параметры разгона и торможения;
- Режим позиционирования позволяет выполнять перемещения в заданную координату или на заданноесмещение с указанными параметрами скорости, ускорения, торможения;
- Режим поиска нулевого положения позволяет выполнить поиск начального положения несколькими способами.
Помимо управления шаговым двигателем по протоколу CANOpen, контроллер обеспечивает возможность управления положением импульсными сигналами STEP/DIR
Плавная работа шагового двигателя с контроллером SMSD‑4.
 2CAN
2CANКонтроллер SMSD‑4.2CAN поддерживает два режимакоммутации двигателя — током (токовый режим) и напряжением (вольтовый режим). В вольтовом режиме коммутации используется параметры двигателя для расчёта характеристик питающего обмотки напряжения. Такой режим позволяет осуществлятьболее плавное движение на малых оборотах и в пределах полного шага, по сравнению с режимом управления током. Так же в вольтовом режиме есть возможность детектировать заклинивание ротора двигателя.
Габаритные и присоединительные размеры SMSD‑4.2CAN
Подключение контроллера SMSD‑4.2CAN
Схема подключения контроллера SMSD‑4.2CAN Назначение разьемов ввода/вывода контроллера SMSD‑4.2CANКонтроллер шагового двигателя позволяет подключать до четырех датчиков PNP типа. Информация о состоянии цифровых входов доступна для передачи в посылках PDO и может использоваться для реализации различных алгоритмов работы с шаговым двигателем.
Для работы с внешними устройствами доступны два дискретных выхода, управляемых по протоколу CANopen.
За индикацию аварийного состояния блока отвечает выход FAULT. В нормальном (рабочем) состоянии контроллера SMSD-4.2CAN, между клеммами FAULT присутствует сопротивление. При возникновении аварийной ситуации, сопротивление между клеммами стремится к бесконечности.
Работа двух контроллеров SMSD‑4.2CAN под управлением ПЛК
С этим товаром покупают
Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос.
Встроенный интерфейс управления шаговым двигателем
- Учебный центр TI
- Лаборатория точности TI
- TI Precision Labs — Драйверы двигателей
- Шаговые двигатели
- Встроенный интерфейс управления шаговым двигателем
TI Precision Labs
МЕНЮ
TI Precision Labs — Усилители (106)
TI Precision Labs — Часы и хронометраж (18)
TI Precision Labs — Преобразователи данных (88)
TI Precision Labs — интерфейс (44)
TI Precision Labs — Изоляция (18)
TI Precision Labs — микроконтроллеры (18)
TI Precision Labs — драйверы двигателей (35)
Введение в драйверы двигателей (2)
Коллекторные двигатели постоянного тока (4)
Шаговые двигатели (8)
Бесщеточные двигатели постоянного тока (9)
Технология двигателей (4)
-
Проектирование с помощью драйверов двигателей (8)
TI Precision Labs — Коммутаторы и мультиплексоры (22)
TI Precision Labs — Датчики (77)
TI Precision Labs — Аудио (7)
Электронная почта
[ВОСПРОИЗВЕДЕНИЕ МУЗЫКИ] Добро пожаловать в четвертую главу из серии TI Precision Labs, посвященной драйверам шаговых двигателей. Меня зовут Джеймс Локридж. В этом видео я обсуждаю распространенные интерфейсы, используемые во встроенных драйверах шаговых двигателей. Встроенные драйверы шаговых двигателей поставляются с различными вариантами интерфейса управления. На этом слайде показаны три основных: пошаговое направление, включение фазы и ШИМ.
Интерфейс пошагового направления использует нарастающие фронты импульсов на управляющем выводе STEP для перемещения двигателя. Когда драйвер получает нарастающий фронт на выводе STEP, он перемещает двигатель на следующий полный шаг или положение микрошага. Серия ступенчатых импульсов будет непрерывно вращать двигатель. Контакт направления, или контакт DIR, выбирает направление, в котором будет вращаться двигатель. Интерфейс step-direction полезен только для управления шаговыми двигателями.
Фазовый интерфейс — это тип параллельного интерфейса для управления щеточными двигателями постоянного тока и шаговыми двигателями. Контакт включения или EN управляет тем, когда выходы драйвера включают шаговый двигатель.
Меня зовут Джеймс Локридж. В этом видео я обсуждаю распространенные интерфейсы, используемые во встроенных драйверах шаговых двигателей. Встроенные драйверы шаговых двигателей поставляются с различными вариантами интерфейса управления. На этом слайде показаны три основных: пошаговое направление, включение фазы и ШИМ.
Интерфейс пошагового направления использует нарастающие фронты импульсов на управляющем выводе STEP для перемещения двигателя. Когда драйвер получает нарастающий фронт на выводе STEP, он перемещает двигатель на следующий полный шаг или положение микрошага. Серия ступенчатых импульсов будет непрерывно вращать двигатель. Контакт направления, или контакт DIR, выбирает направление, в котором будет вращаться двигатель. Интерфейс step-direction полезен только для управления шаговыми двигателями.
Фазовый интерфейс — это тип параллельного интерфейса для управления щеточными двигателями постоянного тока и шаговыми двигателями. Контакт включения или EN управляет тем, когда выходы драйвера включают шаговый двигатель.
 Вот типичная таблица индексатора из таблицы данных драйвера шагового двигателя. Когда индексная таблица находится в положении 1, драйвер регулирует ток в обмотке фазы А на 0% от полной шкалы, а в обмотке фазы В на 100%. Когда ступенчатый вывод получает нарастающий фронт, индексатор переходит к следующему состоянию в таблице.
Если драйвер сконфигурирован на 1/4 микрошага, вторым состоянием будет состояние, при котором драйвер регулирует 38% полного диапазона тока в обмотке фазы А и 92% в обмотке фазы B. В случае микрошага 1/8 передний фронт на контакте шага будет регулировать токи фазы A и фазы B до 20% и 98% соответственно. Это создает движение ротора, которое составляет половину смещения микрошагового режима 1/4 для каждого нарастающего фронта ступенчатого штифта. В зависимости от настройки микрошага индексатор может не обязательно начинать с индекса 1. Красное поле, показанное в таблице индексатора, указывает начальную точку индексатора шагового драйвера при включении питания.
Эта анимация показывает, как ток в обмотке двигателя изменяется с каждым нарастающим фронтом на выводе STEP.
Вот типичная таблица индексатора из таблицы данных драйвера шагового двигателя. Когда индексная таблица находится в положении 1, драйвер регулирует ток в обмотке фазы А на 0% от полной шкалы, а в обмотке фазы В на 100%. Когда ступенчатый вывод получает нарастающий фронт, индексатор переходит к следующему состоянию в таблице.
Если драйвер сконфигурирован на 1/4 микрошага, вторым состоянием будет состояние, при котором драйвер регулирует 38% полного диапазона тока в обмотке фазы А и 92% в обмотке фазы B. В случае микрошага 1/8 передний фронт на контакте шага будет регулировать токи фазы A и фазы B до 20% и 98% соответственно. Это создает движение ротора, которое составляет половину смещения микрошагового режима 1/4 для каждого нарастающего фронта ступенчатого штифта. В зависимости от настройки микрошага индексатор может не обязательно начинать с индекса 1. Красное поле, показанное в таблице индексатора, указывает начальную точку индексатора шагового драйвера при включении питания.
Эта анимация показывает, как ток в обмотке двигателя изменяется с каждым нарастающим фронтом на выводе STEP. Состояние вывода DIR определяет направление движения двигателя. Если на выводе DIR низкий уровень, индексатор будет перебирать таблицу индексатора в обратном порядке. Некоторые драйверы имеют таблицы индексаторов, которые могут поддерживать микрошаговые режимы вплоть до микрошага 1/256. Напряжение на выводе VREF определяет ток полной шкалы драйвера.
Драйверы со ступенчатым интерфейсом автоматически регулируют ток в обмотках двигателя с помощью прерывания тока. Тип метода прерывания тока выбирается путем выбора режима затухания на драйвере шагового двигателя. В этом примере цифро-аналоговый преобразователь или ЦАП на микроконтроллере устанавливает напряжение на выводе VREF. Для создания положительного синусоидального тока лицевой контакт устанавливается в состояние ВЫСОКИЙ логический уровень.
Микроконтроллер может использовать значения синусоидального микрошага, хранящиеся в справочной таблице, для установки напряжения на выводе VREF с выхода ЦАП. Чтобы создать отрицательные синусоидальные значения, фазовый вывод устанавливается на логический НИЗКИЙ уровень.
Состояние вывода DIR определяет направление движения двигателя. Если на выводе DIR низкий уровень, индексатор будет перебирать таблицу индексатора в обратном порядке. Некоторые драйверы имеют таблицы индексаторов, которые могут поддерживать микрошаговые режимы вплоть до микрошага 1/256. Напряжение на выводе VREF определяет ток полной шкалы драйвера.
Драйверы со ступенчатым интерфейсом автоматически регулируют ток в обмотках двигателя с помощью прерывания тока. Тип метода прерывания тока выбирается путем выбора режима затухания на драйвере шагового двигателя. В этом примере цифро-аналоговый преобразователь или ЦАП на микроконтроллере устанавливает напряжение на выводе VREF. Для создания положительного синусоидального тока лицевой контакт устанавливается в состояние ВЫСОКИЙ логический уровень.
Микроконтроллер может использовать значения синусоидального микрошага, хранящиеся в справочной таблице, для установки напряжения на выводе VREF с выхода ЦАП. Чтобы создать отрицательные синусоидальные значения, фазовый вывод устанавливается на логический НИЗКИЙ уровень. Вывод VREF может повторно использовать одни и те же значения из справочной таблицы, поскольку вывод фазы управляет направлением тока.
Для правильного управления шаговым двигателем опорное синусоидальное напряжение для выводов AV REF и BV REF должно быть равно 9.0 градусов не по фазе. Интерфейс PWM также может управлять шаговыми двигателями аналогично интерфейсу включения фазы. Входные контакты настраивают направление тока, а контакт VREF устанавливает уровни регулирования тока.
При переключении состояний входных контактов ток также меняет направление. Так же, как и в случае с фазовым интерфейсом, опорное синусоидальное напряжение на выводе BV REF также должно быть на 90 градусов не совмещено по фазе с сигналом AV REF. При использовании регулирования тока на ШИМ и интерфейсе включения фазы разрешение микрошагов существенно ограничено разрешением ЦАП. Например, 10-битный ЦАП потенциально может реализовать 1023 уровня микрошагов.
Управление напряжением — это способ управления шаговым двигателем без прерывания тока.
Вывод VREF может повторно использовать одни и те же значения из справочной таблицы, поскольку вывод фазы управляет направлением тока.
Для правильного управления шаговым двигателем опорное синусоидальное напряжение для выводов AV REF и BV REF должно быть равно 9.0 градусов не по фазе. Интерфейс PWM также может управлять шаговыми двигателями аналогично интерфейсу включения фазы. Входные контакты настраивают направление тока, а контакт VREF устанавливает уровни регулирования тока.
При переключении состояний входных контактов ток также меняет направление. Так же, как и в случае с фазовым интерфейсом, опорное синусоидальное напряжение на выводе BV REF также должно быть на 90 градусов не совмещено по фазе с сигналом AV REF. При использовании регулирования тока на ШИМ и интерфейсе включения фазы разрешение микрошагов существенно ограничено разрешением ЦАП. Например, 10-битный ЦАП потенциально может реализовать 1023 уровня микрошагов.
Управление напряжением — это способ управления шаговым двигателем без прерывания тока. Для этого на интерфейсе с поддержкой фазы сигнал ШИМ с синусоидальным рабочим циклом на выводе EN управляет величиной напряжения на клеммах двигателя. Чтобы воссоздать всю синусоиду, фазовый контакт должен изменить свое состояние на половине синусоидальной волны, чтобы изменить полярность напряжения, подаваемого на клеммы двигателя. В этом примере показаны только входы для фазы A. Управление фазой B аналогично, но синусоидальный ШИМ-сигнал на входах должен быть равен 90 градусов не совпадают по фазе с фазой А.
При реализации управления напряжением на интерфейсе ШИМ разработчик прошивки должен помнить о таблице состояний входных контактов. Чтобы создать положительное напряжение на катушке, установите логический уровень N1 в ВЫСОКИЙ, а логический вывод N2 в НИЗКИЙ. Как правило, ШИМ для управления двигателем переключается между состояниями возбуждения и медленного затухания. Из приведенной здесь таблицы вывод N2 должен иметь логический НИЗКИЙ уровень для времени включения ШИМ и высокий логический уровень для времени отключения ШИМ.
Для этого на интерфейсе с поддержкой фазы сигнал ШИМ с синусоидальным рабочим циклом на выводе EN управляет величиной напряжения на клеммах двигателя. Чтобы воссоздать всю синусоиду, фазовый контакт должен изменить свое состояние на половине синусоидальной волны, чтобы изменить полярность напряжения, подаваемого на клеммы двигателя. В этом примере показаны только входы для фазы A. Управление фазой B аналогично, но синусоидальный ШИМ-сигнал на входах должен быть равен 90 градусов не совпадают по фазе с фазой А.
При реализации управления напряжением на интерфейсе ШИМ разработчик прошивки должен помнить о таблице состояний входных контактов. Чтобы создать положительное напряжение на катушке, установите логический уровень N1 в ВЫСОКИЙ, а логический вывод N2 в НИЗКИЙ. Как правило, ШИМ для управления двигателем переключается между состояниями возбуждения и медленного затухания. Из приведенной здесь таблицы вывод N2 должен иметь логический НИЗКИЙ уровень для времени включения ШИМ и высокий логический уровень для времени отключения ШИМ. Вот блок-схема драйвера шагового двигателя с ШИМ-интерфейсом. Анимация показывает, как подать ШИМ-сигналы на входные контакты, чтобы создать положительную часть синусоидального напряжения на выходах. Для создания отрицательной части синусоиды на выводе N2 удерживается высокий логический уровень, в то время как сигнал ШИМ подается на вывод N1.
Для управления напряжением интерфейс с поддержкой фазы может быть проще в использовании, чем интерфейс ШИМ, поскольку для него требуется только два GPIO с выходными периферийными устройствами ШИМ микроконтроллера. Однако интерфейс ШИМ предлагает больше возможностей для выходных состояний. Разработчик системы может решить, какой интерфейс лучше всего подходит для его приложения, изучив таблицу состояний управляющих входов.
В таблице на этом слайде пошаговый интерфейс сравнивается с двумя типами параллельных интерфейсов. Интерфейс пошагового направления помогает упростить сложные управляющие сигналы от микроконтроллера за счет использования индексирующей таблицы, встроенной в драйвер.
Вот блок-схема драйвера шагового двигателя с ШИМ-интерфейсом. Анимация показывает, как подать ШИМ-сигналы на входные контакты, чтобы создать положительную часть синусоидального напряжения на выходах. Для создания отрицательной части синусоиды на выводе N2 удерживается высокий логический уровень, в то время как сигнал ШИМ подается на вывод N1.
Для управления напряжением интерфейс с поддержкой фазы может быть проще в использовании, чем интерфейс ШИМ, поскольку для него требуется только два GPIO с выходными периферийными устройствами ШИМ микроконтроллера. Однако интерфейс ШИМ предлагает больше возможностей для выходных состояний. Разработчик системы может решить, какой интерфейс лучше всего подходит для его приложения, изучив таблицу состояний управляющих входов.
В таблице на этом слайде пошаговый интерфейс сравнивается с двумя типами параллельных интерфейсов. Интерфейс пошагового направления помогает упростить сложные управляющие сигналы от микроконтроллера за счет использования индексирующей таблицы, встроенной в драйвер. Это позволяет разработчику системы выбрать более дешевый микроконтроллер с меньшим количеством функций или упростить микропрограмму.
Хотя параллельные интерфейсы могут потребовать больше ресурсов микроконтроллера для управления двигателем, они обеспечивают большую гибкость для микрошаговых режимов или возможность управления напряжением. Иногда параллельные интерфейсы могут обеспечивать меньшие режимы микрошагов или настраиваемые уровни микрошагов с использованием регулирования тока. Управление напряжением может использоваться для двигателей низкого напряжения, когда напряжение питания также низкое.
Иногда простой драйвер двойного Н-моста дешевле, чем тот, который интегрирует текущее регулирование. Однако регулировка тока и микрошаг часто полезны, когда номинальное напряжение двигателя низкое, но доступное напряжение питания высокое. В этом случае регулировка тока помогает поддерживать среднее напряжение на клеммах двигателя в пределах номинального напряжения двигателя, пока ток через обмотки двигателя меньше номинального тока двигателя.
Это позволяет разработчику системы выбрать более дешевый микроконтроллер с меньшим количеством функций или упростить микропрограмму.
Хотя параллельные интерфейсы могут потребовать больше ресурсов микроконтроллера для управления двигателем, они обеспечивают большую гибкость для микрошаговых режимов или возможность управления напряжением. Иногда параллельные интерфейсы могут обеспечивать меньшие режимы микрошагов или настраиваемые уровни микрошагов с использованием регулирования тока. Управление напряжением может использоваться для двигателей низкого напряжения, когда напряжение питания также низкое.
Иногда простой драйвер двойного Н-моста дешевле, чем тот, который интегрирует текущее регулирование. Однако регулировка тока и микрошаг часто полезны, когда номинальное напряжение двигателя низкое, но доступное напряжение питания высокое. В этом случае регулировка тока помогает поддерживать среднее напряжение на клеммах двигателя в пределах номинального напряжения двигателя, пока ток через обмотки двигателя меньше номинального тока двигателя. С каждым из этих вариантов интерфейса разработчики системы могут выбрать правильный интерфейс для достижения наилучшей производительности по отношению к стоимости и сложности системы.
Для получения дополнительной информации о шаговых двигателях и интегрированных драйверах шаговых двигателей TI посетите страницу драйверов шаговых двигателей на сайте TI.com. [音乐 播放] 欢迎 观看 ti 高 实验室 步进 步进 系列 第四 章。 我 叫 叫 叫。 本 视频 中 , 将 讨论 集成 驱动器 上 的 常见 接口。 步进 驱动器 带有 多 步进 上 的 常见。 集成式 驱动器 带有 多 多 多 步进 上 接口。 步进 驱动器 带有种 控制 选项。 此 幻灯片 显示 了 三 个 主要 选项 : 步进 、 相位 使能 和 和 和 步进 方向 接口 使用 控制 引脚 上 脉冲 上升 沿来 使 转动。 驱动器 驱动器 到 到 引 脉冲 沿来 使 转动。 驱动器 接收 到 到 引 上升 沿来 电机 转动 当 驱动器 到 到 引 引 上升 电机 转动 当 驱动器 接收脚 上 上升 沿 时 , 它 会 使 电机 移 至 下 个 整步 或 微步 位置。 一 系列 步进脉冲 将 使 电机 旋转。 引脚 也 称 dir 引脚 用 于 选择 电机 的 方向 引脚 称 引脚 用 于 选择 旋转 的 方向 方向 方向 方向 的 电机 电机。 步进 接口 仅 用 于 驱动 步进 电机。 相位 使 接口 是 一 种 用于 控制 刷式 直流 步进 电机 的 并 接口。 能 也 称 en 引脚 , 于 控制 驱动器 何时 为 使 也 称 引脚 用 控制 驱动器 输出 为 为 为 为 为 为步进 电机。 相位 也 称 称 引脚 , 用 于 选择 电流 绕组 的 方向。 vref 引脚 选择 驱动器 步进 绕 组 中 调节 的 电平。 步进 绕 中 的 电流 决定 了 的 电平 步进 绕 组 的 电流 决定 了 转子 电平 步进 绕 中 电流 决定 了的 位置。 pwm 接口 另 一 种 用于 控制 刷式 直流 和 步进 的 并 行 接口。 电机 驱动器 输出 输入 引脚 的。 具有 具有 控制 接口 的 也 可能 具有 电流 调节 的 具有 控制 的 驱动器 可能 具有 用于 调节 的 具有 引 的 驱动器 可能 具有 电流 的 的 的 的 的 的 的 的脚。 步进 方向 接口 的 集成式 步进 驱动器 包含 一 分度器表 , 该 表 确定 在 每 个 步进 绕 中 要 调节 的 电平。 中 每 一 进 的 电平 是 满量程 满量程。 中 一 步 进 电流 电平 是 满量程 满量程。 中 一 进 的 电平 是 满量程电流 的。 满量 程 电流 是 步进 驱动器 将 在 绕组 中 调节 的 大 电流。 通常 , 步进 驱动器 内部 或 的 基准 设置 满量程。。 是 步进 数据 表 中 的 设置 满量程。 这 是 驱动器 数据 中 典型。 满量程。 这 步进 数据 中 的 分度器表当 分度器表 索引 1 时 , 驱动器 将 a 相 绕组 中 的 调节 为 满量程 设置 0%, 将 b 相绕组 中 电流 调节 为 100%。 引脚 接收 上升 沿 时 , 分度器 将 将 将 将 将移 至 中 的 下 一 个 状态。 如果 将 驱动器 配置 为 1/4 微步 , 则 第二 种 状态 是 驱动器 在 相绕组 中 将 程电流 调节 为 38%, 在 相绕组 中 满 量程 量程 程电流 为 38%, 在 中 满 量程 量程电流调节为 92%。 1/8 微步 情况 下 , 步进 引脚 上 上 上升 沿 会 将 a 相和 B 相电流 分别 调节 为 20%和 98%。 步进 的 每 个 上升 沿 ,将 产生 转子 转动 为 1/4 微步 模式 位移 的 一半 根据 微步 设置 , 分度器 不 一定 必须 从 索引 1 开始 分度器表 上 显示 的 框 通电 时 步进 驱动器 的 起点。 动画 显示 框 通电 时 驱动器 分度器 起点。 动画 显示 框 通电 步进 驱动器 的 起点 该 动画了 电机 组 中 的 电流 如何 随 随 引脚 引脚 的 每 个 上升 沿 而。。。 引脚 状态 决定 了 的 转动 方向。 如果 引脚 低 电平 电平 则 将 反向 遍历 分度器表。 引脚 低 电平 , 则 将 反向 分度器表。。一些 驱动器 分度器表 , 可以 提供 低 至 1/256 微步 微步 模式。 vref 引脚 上 的 电压 决定 驱动器 的 满量 电流。 步进 方向 的 驱动器 通过 电流斩波 调节 电机 绕组。 带有 方向 的 驱动器 电流斩波 自动 调节 绕组 绕组。 步进 接口 驱动器 通过 自动 调节 绕组 绕组中 的。 通过 选择 步进 驱动器 上 的 衰减 模式 来 电流 斩波 技术 的 类型。 在 示例 中 , 微控制器 上 数模转换器 数模转换器 (DAC) 可 设置 引脚 上 电压。 为了 产生 产生 产生 产生 产生 产生 产生 产生 产生 产生 产生 产生正正 弦 电流 , 将 面 引脚 设置 为 逻辑 高 电平。 可以 使用 存储 在 查找 表 中 正弦 微 步值 来 设置 DAC 的 vref 引脚。 为了 产生 弦值 弦值 , 相位 引 引 引脚 为了 产生 弦值 , 相位 相位 引 引 引 相位 相位 相位 相位脚 设置 逻辑 低 电平。 由于 相位 引脚 控制 电流 的 方向 , 因此 vref 引脚 可以 重复 使用 表 中 的 相同值 为了 正确 驱动 电机 , a av 和 bv ref 引脚 正弦 基准 电压 必须 必须 电机 , 和 和 的 正弦 电压 必须 必须 驱动 驱动 驱动№ 90 度。。 pwm 接口 可以 驱动 步进 电机 , 其 方式 与 相位 能 接口 类似。 输入 引脚 配置 电流 方向 , 而 引脚 电流 调节 电平。 切换 输入 引脚 的 状态 电流 也 电流 电平 通过 切换 引脚 的 , 电流 也 也会 改变。 与 相位 使 能 接口 一样 , bv ref 引脚 正弦 基准 电压 必须 与 与 a av ref 异相 异相 90 度 通过 对 对 和 使 能 接口 进行 电流 调节 微步 分辨率 根本 上 受 能 接口 电流 调节 微步 分辨率 根本 上 受 受 受 电流 调节 微步 从 根本 根本DAC 分辨率 限制。 例如 , 一 个 10 位 DAC 可能 实现 1,023 个微步级 电压 控制 是 一 种 在 不 使用 电流斩波 的 情况 驱动 电机 的 方法。 在 相位 使 能 上 此 电机 的。 要 在 使 能 上 此 步进 的。 要 使 能 上 执行 执行操作 , 通过 通过 en 引脚 具有 正弦 占空 比 的 pwm 信号 控制 电机 上 电压 的 大小。 要 重建 整个 正弦波 , 相位 必须 正弦波 的 一半 位置 切换 状态 , 以 施加 到 在 的 位置 切换 状态 , 以 施加 电机 电机 正弦波 位置 切换 状态 , 改变 引脚端子 的 的 极性。 此 示例 仅 显示 a 相 的。。 b 相 类似 , 但是 输入 上 的 正弦 pwm 信号 与 相 相 异相 度。 在 pwm 接口 实现 电压 控制 时 固件 人员 必须 在 在 接口 实现 控制 时 固件 人员 必须 必须 必须 人员 人员 人员 人员 人员注意 输入 的 状态 表。 为了 在 线圈 上 产生 电压 电压 请 将 n1 设置 逻辑 高 电平 , 将 n2 设置 逻辑 低 电平 通常 , 用 于 电机 的 的 在 驱动 和 衰减 , 于 电机 的 的 的 在 状态 慢速 衰减 用状态 之间。 根据 此 处 显示 的 表格 可以 查看出 , 对于 pwm 接通 , , n2 引脚 需要 逻辑 低 电平 , 对于 pwm 关断 , n2 引脚 为 逻辑 高 电平。 是 一 , , 引脚 为 逻辑 电平。 是 一 个 , , , 逻辑 电平。 是 一 个 关断带有 Шир 接口 步进 驱动器 的 框图。 该 动画 演示 了 向 输入 引脚 提供 提供 信号 信号 , 以 输出 端 产生 电压 的 正 半 部分。 为了 产生 的 负半 周 部分 , 当 位于 位于。 为了 正弦波 负半 周 部分 当 当 位于 位于。 为了 正弦波 负半 部分 当引脚 上 , , n2 引脚 逻辑 高 电平。 对于 电压 控制 , 相位 使 接口 可能 比 比 pwm 接口 易于 使用 , 因为 它 需要 两 个 gpio 和 个 的 的 的 的 输出 然而 , 个 和 个 的 的 的 输出 然而 然而 , , 然而 然而 然而 然而PWM 接口 输出 状态 提供 了 更 多 的。。 设计 人员 可以 通过 查看 控件 输入 状态 表 来 决定 接口 最 适合 的 应用 本 幻灯片 上 的 表格 步进 步进 接口 与 种 并行 幻灯片 上 的 表格 将 方向 接口 两 并行 接口 上 的 的 的 的 的了 比较 通过 使用 集成 在 驱动器 中 的 分度器表 , 步进 接口 有助于 简化 来自 微控制器 的 控制 信号 复杂性。 这 使 设计 人员 可以 功能 较 少 的 低 微 控制器 控制器 , , 人员 选择 较 少 低 成本 控制器 控制器 控制器 , , , , , 选择 低 低 微 控制器 控制器 控制器 控制器 ,或 降低 的 复杂性。 尽管 并 行 接口 可能 需要 多 的 微控制器 资源 控制 电机 电机 , 但 为 微步 模式 或 控制 选项 提供 更 大 的。 有时 并 行 可以 使用 调节 更 大 灵活性。 并 行 可以 使用 来 实现 大 灵活性。 行 接口 使用 来 实现较 小 微步 模式 或 自 定义 微步 级别。 当 电源 也 很 低 时 , 电压 控制 可 用 低压 电机。 有时 , 个 简单 双 双 桥 驱动器 要 一 个 集成 了 的 成本 桥 桥 驱动器 要 要 个 集成 低 低 低。 但是 当 电机额 定 电压 较 低 但 可 用 电源 较 高 时 , 电流 调节 和 微步 进 很 有用 在 这 种 情况 下 , 流过 电机 绕组 电流 小于 电机 的 电流 调节 有助 流过 电机 绕组 电流 小于 的 电流 调节 有助 有助于 将 端子 上 的 平均 电压 保持 在 电机 的 电压 范围 内。 这些 接口 选项 中 , 系统 设计 人员 可以 选择 合适 接口 , 以 在 系统 和 复杂性 方面 最佳 性能 步 电机 在 系统 成本 和 方面 最佳。 进 电机 系统 系统 成本 和 方面 步 电机和 TI 集成式步进驱动器的更多信息, 请访问 TI.
С каждым из этих вариантов интерфейса разработчики системы могут выбрать правильный интерфейс для достижения наилучшей производительности по отношению к стоимости и сложности системы.
Для получения дополнительной информации о шаговых двигателях и интегрированных драйверах шаговых двигателей TI посетите страницу драйверов шаговых двигателей на сайте TI.com. [音乐 播放] 欢迎 观看 ti 高 实验室 步进 步进 系列 第四 章。 我 叫 叫 叫。 本 视频 中 , 将 讨论 集成 驱动器 上 的 常见 接口。 步进 驱动器 带有 多 步进 上 的 常见。 集成式 驱动器 带有 多 多 多 步进 上 接口。 步进 驱动器 带有种 控制 选项。 此 幻灯片 显示 了 三 个 主要 选项 : 步进 、 相位 使能 和 和 和 步进 方向 接口 使用 控制 引脚 上 脉冲 上升 沿来 使 转动。 驱动器 驱动器 到 到 引 脉冲 沿来 使 转动。 驱动器 接收 到 到 引 上升 沿来 电机 转动 当 驱动器 到 到 引 引 上升 电机 转动 当 驱动器 接收脚 上 上升 沿 时 , 它 会 使 电机 移 至 下 个 整步 或 微步 位置。 一 系列 步进脉冲 将 使 电机 旋转。 引脚 也 称 dir 引脚 用 于 选择 电机 的 方向 引脚 称 引脚 用 于 选择 旋转 的 方向 方向 方向 方向 的 电机 电机。 步进 接口 仅 用 于 驱动 步进 电机。 相位 使 接口 是 一 种 用于 控制 刷式 直流 步进 电机 的 并 接口。 能 也 称 en 引脚 , 于 控制 驱动器 何时 为 使 也 称 引脚 用 控制 驱动器 输出 为 为 为 为 为 为步进 电机。 相位 也 称 称 引脚 , 用 于 选择 电流 绕组 的 方向。 vref 引脚 选择 驱动器 步进 绕 组 中 调节 的 电平。 步进 绕 中 的 电流 决定 了 的 电平 步进 绕 组 的 电流 决定 了 转子 电平 步进 绕 中 电流 决定 了的 位置。 pwm 接口 另 一 种 用于 控制 刷式 直流 和 步进 的 并 行 接口。 电机 驱动器 输出 输入 引脚 的。 具有 具有 控制 接口 的 也 可能 具有 电流 调节 的 具有 控制 的 驱动器 可能 具有 用于 调节 的 具有 引 的 驱动器 可能 具有 电流 的 的 的 的 的 的 的 的脚。 步进 方向 接口 的 集成式 步进 驱动器 包含 一 分度器表 , 该 表 确定 在 每 个 步进 绕 中 要 调节 的 电平。 中 每 一 进 的 电平 是 满量程 满量程。 中 一 步 进 电流 电平 是 满量程 满量程。 中 一 进 的 电平 是 满量程电流 的。 满量 程 电流 是 步进 驱动器 将 在 绕组 中 调节 的 大 电流。 通常 , 步进 驱动器 内部 或 的 基准 设置 满量程。。 是 步进 数据 表 中 的 设置 满量程。 这 是 驱动器 数据 中 典型。 满量程。 这 步进 数据 中 的 分度器表当 分度器表 索引 1 时 , 驱动器 将 a 相 绕组 中 的 调节 为 满量程 设置 0%, 将 b 相绕组 中 电流 调节 为 100%。 引脚 接收 上升 沿 时 , 分度器 将 将 将 将 将移 至 中 的 下 一 个 状态。 如果 将 驱动器 配置 为 1/4 微步 , 则 第二 种 状态 是 驱动器 在 相绕组 中 将 程电流 调节 为 38%, 在 相绕组 中 满 量程 量程 程电流 为 38%, 在 中 满 量程 量程电流调节为 92%。 1/8 微步 情况 下 , 步进 引脚 上 上 上升 沿 会 将 a 相和 B 相电流 分别 调节 为 20%和 98%。 步进 的 每 个 上升 沿 ,将 产生 转子 转动 为 1/4 微步 模式 位移 的 一半 根据 微步 设置 , 分度器 不 一定 必须 从 索引 1 开始 分度器表 上 显示 的 框 通电 时 步进 驱动器 的 起点。 动画 显示 框 通电 时 驱动器 分度器 起点。 动画 显示 框 通电 步进 驱动器 的 起点 该 动画了 电机 组 中 的 电流 如何 随 随 引脚 引脚 的 每 个 上升 沿 而。。。 引脚 状态 决定 了 的 转动 方向。 如果 引脚 低 电平 电平 则 将 反向 遍历 分度器表。 引脚 低 电平 , 则 将 反向 分度器表。。一些 驱动器 分度器表 , 可以 提供 低 至 1/256 微步 微步 模式。 vref 引脚 上 的 电压 决定 驱动器 的 满量 电流。 步进 方向 的 驱动器 通过 电流斩波 调节 电机 绕组。 带有 方向 的 驱动器 电流斩波 自动 调节 绕组 绕组。 步进 接口 驱动器 通过 自动 调节 绕组 绕组中 的。 通过 选择 步进 驱动器 上 的 衰减 模式 来 电流 斩波 技术 的 类型。 在 示例 中 , 微控制器 上 数模转换器 数模转换器 (DAC) 可 设置 引脚 上 电压。 为了 产生 产生 产生 产生 产生 产生 产生 产生 产生 产生 产生 产生正正 弦 电流 , 将 面 引脚 设置 为 逻辑 高 电平。 可以 使用 存储 在 查找 表 中 正弦 微 步值 来 设置 DAC 的 vref 引脚。 为了 产生 弦值 弦值 , 相位 引 引 引脚 为了 产生 弦值 , 相位 相位 引 引 引 相位 相位 相位 相位脚 设置 逻辑 低 电平。 由于 相位 引脚 控制 电流 的 方向 , 因此 vref 引脚 可以 重复 使用 表 中 的 相同值 为了 正确 驱动 电机 , a av 和 bv ref 引脚 正弦 基准 电压 必须 必须 电机 , 和 和 的 正弦 电压 必须 必须 驱动 驱动 驱动№ 90 度。。 pwm 接口 可以 驱动 步进 电机 , 其 方式 与 相位 能 接口 类似。 输入 引脚 配置 电流 方向 , 而 引脚 电流 调节 电平。 切换 输入 引脚 的 状态 电流 也 电流 电平 通过 切换 引脚 的 , 电流 也 也会 改变。 与 相位 使 能 接口 一样 , bv ref 引脚 正弦 基准 电压 必须 与 与 a av ref 异相 异相 90 度 通过 对 对 和 使 能 接口 进行 电流 调节 微步 分辨率 根本 上 受 能 接口 电流 调节 微步 分辨率 根本 上 受 受 受 电流 调节 微步 从 根本 根本DAC 分辨率 限制。 例如 , 一 个 10 位 DAC 可能 实现 1,023 个微步级 电压 控制 是 一 种 在 不 使用 电流斩波 的 情况 驱动 电机 的 方法。 在 相位 使 能 上 此 电机 的。 要 在 使 能 上 此 步进 的。 要 使 能 上 执行 执行操作 , 通过 通过 en 引脚 具有 正弦 占空 比 的 pwm 信号 控制 电机 上 电压 的 大小。 要 重建 整个 正弦波 , 相位 必须 正弦波 的 一半 位置 切换 状态 , 以 施加 到 在 的 位置 切换 状态 , 以 施加 电机 电机 正弦波 位置 切换 状态 , 改变 引脚端子 的 的 极性。 此 示例 仅 显示 a 相 的。。 b 相 类似 , 但是 输入 上 的 正弦 pwm 信号 与 相 相 异相 度。 在 pwm 接口 实现 电压 控制 时 固件 人员 必须 在 在 接口 实现 控制 时 固件 人员 必须 必须 必须 人员 人员 人员 人员 人员注意 输入 的 状态 表。 为了 在 线圈 上 产生 电压 电压 请 将 n1 设置 逻辑 高 电平 , 将 n2 设置 逻辑 低 电平 通常 , 用 于 电机 的 的 在 驱动 和 衰减 , 于 电机 的 的 的 在 状态 慢速 衰减 用状态 之间。 根据 此 处 显示 的 表格 可以 查看出 , 对于 pwm 接通 , , n2 引脚 需要 逻辑 低 电平 , 对于 pwm 关断 , n2 引脚 为 逻辑 高 电平。 是 一 , , 引脚 为 逻辑 电平。 是 一 个 , , , 逻辑 电平。 是 一 个 关断带有 Шир 接口 步进 驱动器 的 框图。 该 动画 演示 了 向 输入 引脚 提供 提供 信号 信号 , 以 输出 端 产生 电压 的 正 半 部分。 为了 产生 的 负半 周 部分 , 当 位于 位于。 为了 正弦波 负半 周 部分 当 当 位于 位于。 为了 正弦波 负半 部分 当引脚 上 , , n2 引脚 逻辑 高 电平。 对于 电压 控制 , 相位 使 接口 可能 比 比 pwm 接口 易于 使用 , 因为 它 需要 两 个 gpio 和 个 的 的 的 的 输出 然而 , 个 和 个 的 的 的 输出 然而 然而 , , 然而 然而 然而 然而PWM 接口 输出 状态 提供 了 更 多 的。。 设计 人员 可以 通过 查看 控件 输入 状态 表 来 决定 接口 最 适合 的 应用 本 幻灯片 上 的 表格 步进 步进 接口 与 种 并行 幻灯片 上 的 表格 将 方向 接口 两 并行 接口 上 的 的 的 的 的了 比较 通过 使用 集成 在 驱动器 中 的 分度器表 , 步进 接口 有助于 简化 来自 微控制器 的 控制 信号 复杂性。 这 使 设计 人员 可以 功能 较 少 的 低 微 控制器 控制器 , , 人员 选择 较 少 低 成本 控制器 控制器 控制器 , , , , , 选择 低 低 微 控制器 控制器 控制器 控制器 ,或 降低 的 复杂性。 尽管 并 行 接口 可能 需要 多 的 微控制器 资源 控制 电机 电机 , 但 为 微步 模式 或 控制 选项 提供 更 大 的。 有时 并 行 可以 使用 调节 更 大 灵活性。 并 行 可以 使用 来 实现 大 灵活性。 行 接口 使用 来 实现较 小 微步 模式 或 自 定义 微步 级别。 当 电源 也 很 低 时 , 电压 控制 可 用 低压 电机。 有时 , 个 简单 双 双 桥 驱动器 要 一 个 集成 了 的 成本 桥 桥 驱动器 要 要 个 集成 低 低 低。 但是 当 电机额 定 电压 较 低 但 可 用 电源 较 高 时 , 电流 调节 和 微步 进 很 有用 在 这 种 情况 下 , 流过 电机 绕组 电流 小于 电机 的 电流 调节 有助 流过 电机 绕组 电流 小于 的 电流 调节 有助 有助于 将 端子 上 的 平均 电压 保持 在 电机 的 电压 范围 内。 这些 接口 选项 中 , 系统 设计 人员 可以 选择 合适 接口 , 以 在 系统 和 复杂性 方面 最佳 性能 步 电机 在 系统 成本 和 方面 最佳。 进 电机 系统 系统 成本 和 方面 步 电机和 TI 集成式步进驱动器的更多信息, 请访问 TI. com 上的 步进驱动器 页面。
com 上的 步进驱动器 页面。Предыдущий Далее
Описание
30 октября 2019 г.
В этом видео обсуждаются распространенные интерфейсы, используемые во встроенных драйверах шаговых двигателей, и способы микрошага с PH/EN и VREF или с частью STEP/DIR.
Скачать слайды вебинара
Дополнительная информация
CSMIO/IP-M 4-осевой контроллер движения Ethernet (STEP/DIR), контроллеры ЧПУ
Store Home Контроллеры Контроллеры ЧПУ
Информация о продукте – сопутствующие товары
1 В наличии
253,00 фунтов стерлингов (303,60 фунтов стерлингов, включая налог)
Кол-во:
Безопасный заказ через SagePay и PayPal
Быстрая доставка со склада в Великобритании
Задать вопрос о 4-осевом контроллере движения Ethernet CSMIO/IP-M (STEP/DIR) -контроллер движения оси. В сочетании с ПК и управляющим программным обеспечением (Mach4, Mach5, CS-Lab) это идеальная система для управления станками с ЧПУ. CSMIO/IP-M был разработан для профессионалов, производителей автоматики ЧПУ, специалистов по модернизации и любителей, которые хотят оснастить свой станок эффективной, стабильной и гибкой системой управления ЧПУ. CSMIO/IP-M для тех, кому нужен такой же точный и надежный контроллер, как и его старший брат CSMIO/IP-S, затрачивающий гораздо меньше денег (подробнее о возможностях, поддерживаемых CSMIO/IP-M, вы можете прочитать ниже).
CSMIO/IP-M был разработан для профессионалов, производителей автоматики ЧПУ, специалистов по модернизации и любителей, которые хотят оснастить свой станок эффективной, стабильной и гибкой системой управления ЧПУ. CSMIO/IP-M для тех, кому нужен такой же точный и надежный контроллер, как и его старший брат CSMIO/IP-S, затрачивающий гораздо меньше денег (подробнее о возможностях, поддерживаемых CSMIO/IP-M, вы можете прочитать ниже).
Стабильность работы
Обеспечивается связью с ПК по сети Ethernet – физический уровень гальванически развязан, используемые протоколы обеспечивают надежную и быструю передачу даже в промышленных условиях). Практически любые другие интерфейсы не обеспечивают непрерывности и надежности передачи на таком высоком уровне, как ETHERNET. Вот почему в настоящее время он является мировым стандартом высокоскоростной цифровой связи.
Простота установки
Одним из самых больших преимуществ CSMIO/IP-S является простота установки. Для корректной работы не требуется никакой внешней электроники. Входные/выходные сигналы оптически изолированы, отфильтрованы, защищены от короткого замыкания, перегрева и т. д. Все сигналы адаптированы к промышленному стандарту 24 В. Устройство заключено в компактный корпус, монтируется на DIN-рейку, благодаря чему механическая и электронная установка в шкафу управления занимает меньше времени и даже упрощается.
Входные/выходные сигналы оптически изолированы, отфильтрованы, защищены от короткого замыкания, перегрева и т. д. Все сигналы адаптированы к промышленному стандарту 24 В. Устройство заключено в компактный корпус, монтируется на DIN-рейку, благодаря чему механическая и электронная установка в шкафу управления занимает меньше времени и даже упрощается.
Контроллер CSMIO/IP-S работает с программным обеспечением Mach4/Mach5 из-за его низкой цены, популярности и огромных возможностей адаптации к конкретным требованиям. Что касается управляющего сигнала, выбор является популярным стандартом шаг/направление (step/dir). Таким образом можно управлять как шаговыми двигателями, так и самыми современными сервоприводами. Благодаря частоте стоп-сигнала, достигающей 4 МГц, вы можете максимально использовать шаговое деление в шаговых двигателях, тем самым уменьшая резонанс и значительно улучшая производительность двигательной установки. Это также обеспечивает полное преимущество энкодеров с большим количеством импульсов на оборот в сервоприводах, а также позволяет достичь такой точности и скорости, которые ранее были недоступны в этом ценовом сегменте.
Как это работает?
Короче говоря, программное обеспечение управления (Mach4, Mach5), установленное на ПК, является мозгом, а контроллер CSMIO/IP-S является сердцем всей системы управления. Программное обеспечение управления (Mach4, Mach5) преобразует gcodes в траекторию движения и отправляет ее через сетевое соединение на CSMIO/IP-S. Основываясь на траектории, контроллер генерирует точный сигнал step/dir для всех осей. Такое разделение задач делает ПК менее загруженным, чем при использовании классического параллельного LPT-порта.
Каковы основные преимущества контроллера CSMIO/IP-S?
- Сигнал шага/направления – уже после первого запуска станка с ЧПУ, оснащенного контроллером CSMIO/IP-S, вы заметите, насколько плавно и точно работают ваши двигатели. Это благодаря высокому качеству сигнала step/dir и буферу данных, в котором хранится небольшая часть траектории, отправленной управляющим программным обеспечением (Mach4, Mach5).
- Буфер данных – упомянутый траекторный буфер обеспечивает бесперебойную работу станка с ЧПУ даже в случае временных проблем с сетевым подключением или программным управлением.
- Опора ведомой оси – поддержка до 3 ведомых осей с коррекцией геометрии портала.
- Система безопасности – очень важным преимуществом контроллера CSMIO/IP-S является собственная система безопасности. Он постоянно следит за безопасностью пользователя и машины. Он состоит из множества независимых алгоритмов и сторожевых таймеров, которые очень быстро реагируют на запрещенные или тревожные ситуации. Поддержка RESET для осевых приводов. Поддержка сигналов FAULT от сервоприводов (немедленная остановка машины в случае аварии любой оси).
- Прочный алюминиевый корпус , который хорошо рассеивает тепло и защищает электронные схемы. Читаемые светодиодные элементы управления на передней панели облегчают установку и упрощают диагностику в случае возникновения проблем с коммутаторами и другими внешними устройствами, взаимодействующими с CSMIO/IP-S.
- Макросы VB — вы можете управлять всеми цифровыми и аналоговыми сигналами с помощью макросов VisualBasic.
- Промышленный стандарт – Контроллер CSMIO/IP-S адаптирован к мировым стандартам, применяемым производителями сервоприводов и шаговых приводов, в том числе:
- ступенчатых/направленных выхода, поддерживаемых дифференциальными линейными передатчиками DS26C31 (совместимый со стандартом RS422)
- оптоизолированных цифровых выхода 24 В постоянного тока, поддерживаемых специализированными системами с защитой от короткого замыкания и перегрузки.
- оптоизолированные цифровые входы 24 В постоянного тока
- 0-10Валоговые входы, используемые для подключения потенциометров коррекции скорости вращения шпинделя и подачи оси.
- Используемые аналоговые выходы 0–10 В, в т.ч. для управления ЧРП.
Модули расширения
Возможности CSMIO/IP-S можно расширить с помощью дополнительных модулей расширения:
- CSMIO-ENC – модуль обеспечивает возможность нарезания резьбы с помощью энкодера, жесткое нарезание резьбы
- CSMIO-MPG — модуль для ручного управления осями с помощью энкодера с маховичком.