Устройство электродвигателя постоянного тока
Электрический двигатель – это электрическая машина, предназначенная для преобразования электрической энергии, поступающей от источника тока в механическую энергию. Часть потребляемой электроэнергии расходуется на перемагничивание ферромагнетиков, преодоление электрического сопротивления и силы трения, что сопровождается образованием тепла.
Электродвигатель, работающий от источника постоянного тока, называют двигателем постоянного тока. В зависимости от особенностей конструкции электрические двигатели постоянного тока подразделяются на коллекторные и бесколлекторные. Рассмотрим устройство двигателя постоянного тока на примере изделия коллекторной конструкции. Основные элементы электродвигателя постоянного тока: статор, ротор, коллектор и токопроводящие щетки.
Статор, он же индуктор, – неподвижная часть машины, в большинстве вариантов исполнения – внешняя. Статор состоит из станины и магнитных полюсов. В зависимости от конструкции двигателя на статоре могут устанавливаться постоянные магниты, электромагниты с обмотками возбуждения или короткозамкнутые обмотки. Кроме основных магнитных полюсов на статоре могут устанавливаться дополнительные полюса. Статор необходим для создания магнитного потока в системе.
В зависимости от конструкции двигателя на статоре могут устанавливаться постоянные магниты, электромагниты с обмотками возбуждения или короткозамкнутые обмотки. Кроме основных магнитных полюсов на статоре могут устанавливаться дополнительные полюса. Статор необходим для создания магнитного потока в системе.
Подвижная вращающаяся часть машины, как правило, внутренняя – ротор или якорь. Ротор электродвигателя постоянного тока состоит из многочисленных катушек с токопроводящими обмотками, по которым проходит электрический ток. Количество катушек в конструкции ротора может достигать нескольких десятков. Таким образом частично устраняется неравномерность крутящего момента, уменьшается коммутируемый ток, обеспечивается оптимальное взаимодействие магнитных полей статора и ротора.
Щеточно-коллекторный узел представляет собой связующее звено между ротором и статором. В коллекторе объединены выводы всех катушек ротора. Этот узел служит переключателем тока со скользящими контактами и дополнительно выполняет функции датчика углового положения ротора.
Щетки – неподвижные контакты, подводящие ток к ротору. Чаще всего в двигателях применяются медно-графитовые и графитовые щетки. При вращении ротора происходит замыкание и размыкание контактов коллектора. При этом в обмотках ротора происходят переходные процессы, приводящие к искрению. Искрение и трение при работе двигателя постоянного тока приводят к тому, что щеточно-коллекторный узел является самым уязвимым элементом конструкции. Для уменьшения искрения чаще всего используется установка дополнительных полюсов. Порядка 25% поломок электродвигателей происходит по причине неисправности щеточно-коллекторного узла. В некоторых областях применения электродвигателей постоянного тока поломки по причине износа щеточно-коллекторного узла составляют свыше 60% от общего количества.
При подаче тока на ротор, помещенный в магнитное поле статора, в системе возникает момент силы, под действием которого ротор начинает вращаться. Направление вращения ротора зависит от направления тока. Чтобы ротор вращался в одном и том же направлении, направление тока в нем должно оставаться постоянным. Это условие выполняется с помощью коллекторного узла. Механическая энергия вращения ротора передается другим механизмам посредством присоединенного к ротору шкива и ременной передачи.
Чтобы ротор вращался в одном и том же направлении, направление тока в нем должно оставаться постоянным. Это условие выполняется с помощью коллекторного узла. Механическая энергия вращения ротора передается другим механизмам посредством присоединенного к ротору шкива и ременной передачи.
✔ Особенности электродвигателя ✔ Статьи компании «Мир Привода»
Электрический двигатель – сложная система, компоненты которой способны перерабатывать электрическую энергию, преобразовывая ее в механическую. Она требуется для активации всевозможных механизмов. Электрический двигатель – ведущий компонент электропривода. В зависимости от режима функционирования электродвигатель может выполнять преобразование энергии в обратном направлении, то есть преобразовывать механическую энергию в электрическую – в этом случае он работает как электрогенератор.
Устройства отличаются по разным параметрами, включая тип механического движения, которое формируют. По этим характеристикам они могут быть вращающимися, линейными и другими.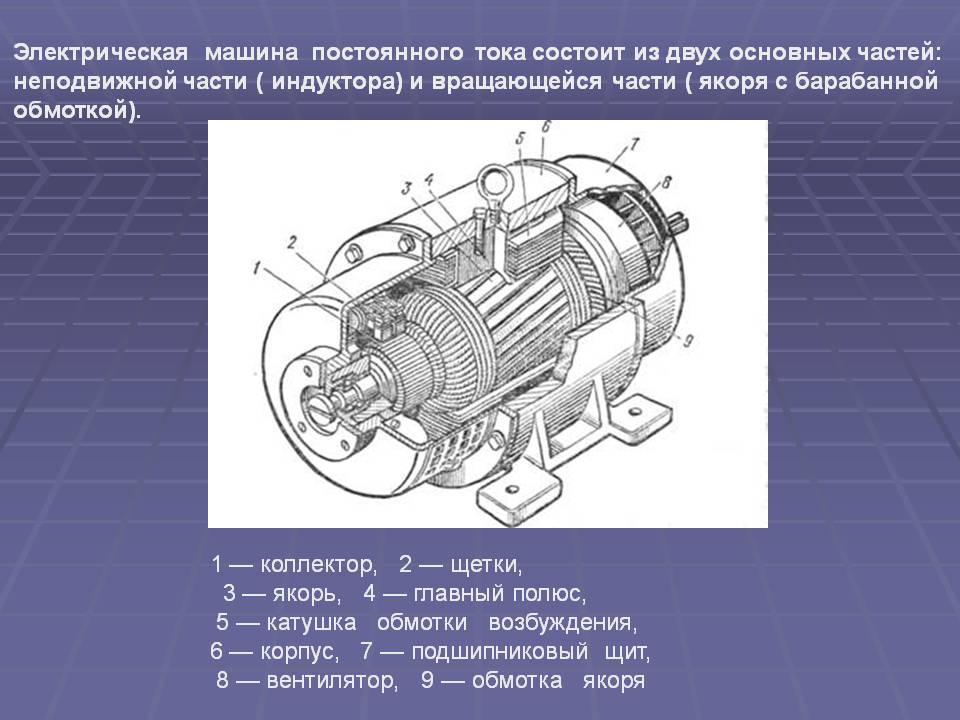 Под понятием электрического двигателя зачастую подразумевается вращающаяся система, которая пользуется сегодня повышенным спросом.
Под понятием электрического двигателя зачастую подразумевается вращающаяся система, которая пользуется сегодня повышенным спросом.
Как работает электродвигатель
В принцип функционирования заложена электромагнитная индукция. Это механизм образования электрополя или тока, что происходит ввиду воздействия колеблющегося магнитного поля. Любое электрическое поле, склонно к изменениям, формирует магнитное – взаимодействие этих двух факторов способствует отталкиванию или притягиванию компонентов статора и ротора.
Из чего состоит агрегат
Электродвигатель вращающегося типа состоит из двух основных частей:
статора и ротора. Первый относится к статичным компонентам, второй – к вращающимся. Также в конструкции предусмотрен якорь. Это обмотка, которая является проводником тока при функционировании мотора. Якорь бывает статичным или активным. Зачастую таким наименованием характеризуются подвижный элемент в различных приборах, вырабатывающих электромагнитное поле.
Какие электродвигатели сегодня наиболее актуальны
Существуют разные вариации электрических двигателей, но наиболее востребованными считаются асинхронные и модели постоянного тока
Асинхронные
Отличаются относительно низкой ценой по сравнению с конкурентами. Обладают простой конструкцией. И эти два фактора делают изделие широко востребованным в разных сферах. Особенность конструкций заключается в таком параметре, как скольжение. Он предполагает разницу между частотой вращения магнитного поля статичного элемента и скорости движения ротора. Напряжение на динамичном компоненте машины индуцируется благодаря переменному магнитному полю обмоток статора. Вращение продуцирует взаимодействие электромагнитов неподвижного элемента и магнитного поля ротора, которое образуется ввиду сформированных в нем вихревых токов. По типам обмоток статора бывают двигатели:
Обладают простой конструкцией. И эти два фактора делают изделие широко востребованным в разных сферах. Особенность конструкций заключается в таком параметре, как скольжение. Он предполагает разницу между частотой вращения магнитного поля статичного элемента и скорости движения ротора. Напряжение на динамичном компоненте машины индуцируется благодаря переменному магнитному полю обмоток статора. Вращение продуцирует взаимодействие электромагнитов неподвижного элемента и магнитного поля ротора, которое образуется ввиду сформированных в нем вихревых токов. По типам обмоток статора бывают двигатели:
- Однофазные – агрегаты могут работать только при наличии внешнего фазосдвигающего компонента, например, конденсатора или индуктивного прибора. Эти двигатели отличаются незначительной мощностью.
- С двумя фазами – машины, которые оснащаются двумя обмотками со смещенными по отношению друг к другу фазами. Модели часто встречаются в бытовой технике, а также в оборудовании, которое не требует мощного электродвигателя.

- С тремя и более фазами – многофазные электрические машины, оснащенные тремя+ обмотками статора, смещенными на определенный угол.

Обмотка ротора электродвигателей первого вида – это стержни, которые лишены изоляции, и изготовлены из сочетания меди и алюминия. Они замкнуты с двух сторон кольцами. Такие электродвигатели обладают внушительным набором сильных сторон:
- Упрощенная система пуска. Также оборудование допускает подключение к электросети посредством устройств коммутации.
- Допустимы короткие нагрузки среднего уровня.
- Могут входить в конструкцию оборудования, эксплуатация которого требует высокой мощности. Моторы этого вида не включают в состав скользящих контактов, которые могут минимизировать мощность.
- Несложное техническое обслуживание и ремонтные работы. Это обусловлено тем, что специалисту не потребуется много времени на разборку простой конструкции.
- Невысокая стоимость – модели стоят значительно дешевле синхронных аналогов.
Среди недостатков асинхронных машин можно отметить:
- Невысокая предельная мощность.
- Сложно реализовать возможность корректировки количества вращений за определённую единицу времени.
- Требует высоких стартовых токов при прямом запуске.
Электродвигатели постоянного тока
Еще один вариант часто используемых электрических машин, которые активно применяются в электрическом транспорте, промышленных аппаратах, в исполнительных механизмах.
Моторы постоянного тока имеют много преимуществ:
- Доступна корректировка частоты вращения посредством изменения уровня напряжения в обмотке. Крутящий момент двигателя постоянного тока остается на едином уровне.
- Большой коэффициент полезного действия – этот параметр в ДПТ несколько выше, чем у самых продвинутых асинхронных моделей. При средней нагрузке на валу коэффициент полезного действия возрастает примерно на десять или пятнадцать процентов.
- Относительно компактные размеры, что позволяет использовать ДПТ в качестве микроприводов для различных механизмов.
- Простое управление. Для старта, реверса, корректировки скорости нет необходимости в покупке сложного и дорогостоящего оборудования, в наличии множества устройств коммутации.
- Способен преобразовывать механическую энергию в электрическую – работать в качестве генератора. Двигатели такого плана подходят в качестве стабильных источников постоянного электричества.
- Пусковой момент, позволяющий использовать машину в сочетании с кранами, тяговыми механизмами, конструкциями, предназначенными для подъема грузов.

Двигатели постоянного тока оборудуются:
- Постоянными магнитами – модели одеты в компактные корпуса, и зачастую применяются как микроприводы;
- Электромагнитным возбуждением – наиболее популярное решение, которое используется в бытовой технике, всевозможном оборудовании.
Электрические моторы с электромагнитным возбуждением различаются по типу обмотки статора:
- С параллельным возбуждением – якорь и статор в этом случае подключены параллельно по отношению друг к другу. Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.
- С последовательно подключаемой обмоткой статора. Двигатели этой разновидности обладают высоким пусковым моментом. Они актуальны для транспорта, двигающегося от электричества, в промышленных машинах, где есть нужда в пуске под значительной нагрузкой.
- Смешанное возбуждение. Элемент возбуждения в таких машинах состоит из двух частей. Первая подключена параллельно, вторая – последовательно якорю. Двигатели этой разновидности нужны для функционирования оборудования, требующего высокого пускового момента.
 Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.
Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.Методы управления электрическими двигателями на практике
Управление электрическими машинами предполагает возможность коррекции таких характеристик, как скорость и мощность. К примеру, если на асинхронную машину подать напряжение определенного параметра, она будет продуцировать вращения с номинальной мощность – выйти за эти пределы оборудование не способно.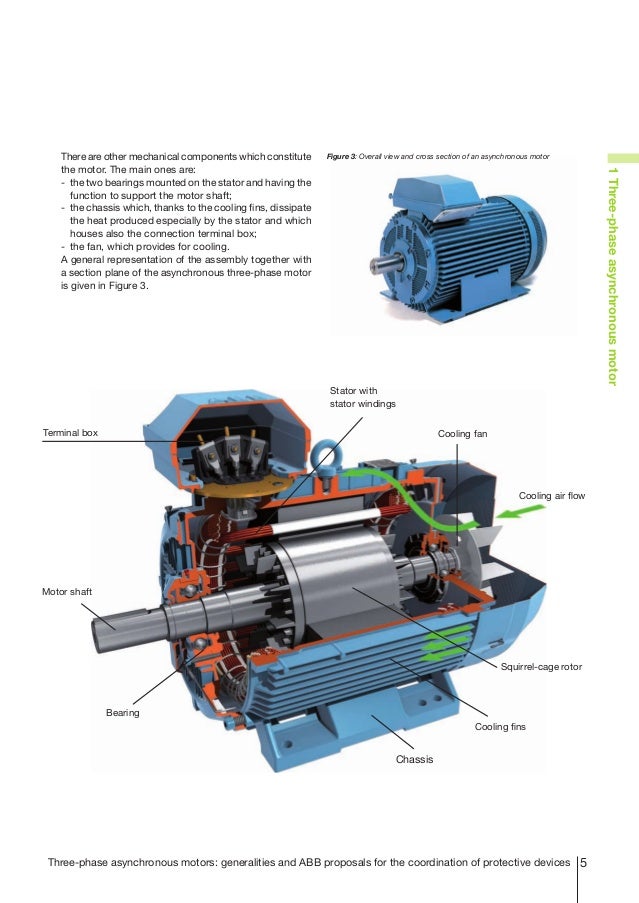 При необходимости снизить или увеличить скорость вращения применяются преобразователи частот. Они призваны сформировать требуемый ритм разгона и остановки, что позволяет быстро и беспроблемно корректировать частоту функционирования агрегата.
При необходимости снизить или увеличить скорость вращения применяются преобразователи частот. Они призваны сформировать требуемый ритм разгона и остановки, что позволяет быстро и беспроблемно корректировать частоту функционирования агрегата.
Чтобы создать нужный разгон и торможение без вмешательства в частоту к работе привлекают устройства плавного пуска. При необходимости в управлении исключительно сценарием старта агрегата внедряют систему «звезда-треугольник». Для активации мотора без устройства плавного пуска актуальны специальные контакторы – с их помощью пуском, тормозом и другими параметры управляют на расстоянии, то есть дистанционно.
Прозвон и сопротивление
Асинхронное оборудование зачастую оснащено 3 обмотками. Каждая из них имеет 2 вывода – их помечают в клеммной коробке. Если выводы доступны, их можно прозвонить с целью получения параметра сопротивления и его сравнения с величинами, снятыми с остальных обмоток. Если величины сопротивления отличаются на один процент и менее, то с высокой вероятностью проблем в работе не имеется.
Для вычисления сопротивления обмоток применяется такой прибор, как омметр. Также следует знать, чем выше мощность агрегата, тем меньше показатель сопротивления обмоток.
Вычисление мощности электрического двигателя
Самый простой метод, который может помочь в определении номинальной мощности двигателя – шильдик. На детали прописана механическая мощность – ее значение зачастую ниже той, которая потребляется, что обусловлено потерями на нагреве и трении. Но если шильдик на системе отсутствует, можно использовать визуальный инструмент – оценка по размерам оборудования. Если мотор оснащен валом большого диаметра, его мощность будет достаточно высокой и наоборот.
Также параметр мощности вычисляется по нагрузке и настройкам, выставленным на защитных приборах, которые подают питание на агрегат. Еще один вариант – старт двигателя на номинальной мощности, что даст валу нагрузку. После этого следует измерить ток специальными клещами. Показатель должен быть идентичен по всем обмоткам. Для определения примерной мощности асинхронной машины, которая подключена по алгоритму «звезда», номинальный ток делят на двое.
Для определения примерной мощности асинхронной машины, которая подключена по алгоритму «звезда», номинальный ток делят на двое.
Увеличение и уменьшение оборотов
Такая функция, как корректировка скорости вращения требуется в следующих режимах функционирования:
- старт;
- остановка;
- работа.
Для этого лучше всего прибегнуть к специальному прибору – частотному преобразователю. Корректировка настроек позволяет достичь различной частоты вращения – она зависит от технических параметров электродвигателя. При этом доступно управление другими настройками оборудования, анализ его состояния во время активности. Можно изменять показатель частоты в плавном и ступенчатом режиме.
Управление оборотами на старте и при установке выполняется посредством устройства плавного пуска. Этот прибор уменьшает пусковой ток благодаря медленному разгону и постепенному повышению оборотов.
Особенности вычисления тока и мощности прибора
Если ток асинхронного устройства известен (узнать можно по шильдику или с помощью изменений в номинальном режиме), но при этом мощность остается неизвестной. В этом случае следует прибегнуть к формуле: Р = I (1,73·U·cosφ·η):
В этом случае следует прибегнуть к формуле: Р = I (1,73·U·cosφ·η):
- P – полезная мощность в номинальном состоянии в Ваттах (этот параметр производители зачастую указывают на шильдике).
- I – показатель тока агрегата.
- U – напряжение питания обмоток.
- Cosφ – коэффициент мощности.
- η – КПД.
Если мощность известна, и требуется узнать ток, используют формулу: I = P/(1,73·U·cosφ·η).
Для оборудования с мощность более 1.5 кВт, с подключением типа «звезда» используют правило – для примерного расчёта показателя тока его мощность умножают на два.
Настройка мощности: увеличение
Мощность, которую производитель дублирует на шильдике мотора, зачастую ограничена допустимым током, то есть – нагревом корпуса. При повышении показателя требуется предпринять ряд действий, которые направлены на нормализацию температуры корпуса привода двигателя. Например, выполнив установку самостоятельного вентилятора.
При применении преобразователя частоты для увеличения мощности частоту можно изменить посредством ШИМ, но при этом не стоит допускать чрезмерного нагревания преобразователя частоты. Параметр также можно изменить с помощью редуктора или ременной передачи, однако число оборотов при этом уменьшится.
Параметр также можно изменить с помощью редуктора или ременной передачи, однако число оборотов при этом уменьшится.
Если вышеперечисленные рекомендации не позволяют справиться с поставленной задачей, остается единственный выход из ситуации – заменить маломощный движок на более производительный.
Потеря мощности при подключении 3-фазного двигателя к 1-фазной сети
Такой формат подключения предполагает использование пускового и рабочего конденсатора для сдвига фазы. Номинальная мощность на валу в этом случает останется неизвестной, а потеря составит около тридцати процентов от номинала. Это обусловлено отсутствием возможности сформировывать перекос по фазам при колебании нагрузок.
Исполнения двигателей
Электрические двигатели отличаются методом установки, степенью защиты, по климатическому предназначению. Асинхронные модели устанавливаются одним из двух методов:
- на лапах;
- посредством фланца.
Двигатели, отличающиеся по климатическому исполнению, применяются в разных условиях. Это может быть умеренный климат, преимущественно низкая температура или средняя, жаркое время года. Также двигатели предназначаются для размещения в разных условиях, например, в стенах помещения, на свежем воздухе, под определенной защитой, например, под навесом, который будет защищать оборудование от осадков.
Это может быть умеренный климат, преимущественно низкая температура или средняя, жаркое время года. Также двигатели предназначаются для размещения в разных условиях, например, в стенах помещения, на свежем воздухе, под определенной защитой, например, под навесом, который будет защищать оборудование от осадков.
Производители присваивают продукции определенный класс защиты, который чаще всего характеризует степень защищенности от пыли, воды. Зачастую в продаже представлены приводы с сертификацией IP 55.
Для чего двигателю нужен тормоз
В некоторых видах оборудования, например, в лифтах, грузоподъемных устройствах, при торможении мотора нужна фиксация вала в статичном положении. Для этого используется электромагнитный тормоз, включённый в состав агрегата – он прикреплен к тыльной части. Управление этим компонентом выполняется посредством частотного преобразователях или микросхемы.
Как двигатель обозначается на электрических схемах
Электрический двигатель отображается на схемах посредством буквы «M», которая очерчена кругом. Также схемы могут включать порядковый номер продукта, число фаз, разновидность тока, метод подключения обмоток, показатель мощности.
Также схемы могут включать порядковый номер продукта, число фаз, разновидность тока, метод подключения обмоток, показатель мощности.
Причины перегрева двигателя
Двигатель – активное оборудование, которое может перегреваться, а причинами этому являются:
- естественный износ подшипников, что создает более активное трение между деталями и провоцирует перегрев;
- высокая нагрузка в области вала;
- некорректное напряжение;
- пропадание фазы;
- короткое замыкание, произошедшее в обмотке;
- отсутствие нормального охлаждения.
Нагрев электродвигателя в негативном ключе отражается на его долговечности и коэффициенте полезного действия. Также высокая температура может со временем спровоцировать износ привода. В этом случае может потребоваться сложный и дорогостоящий ремонт или полная замена агрегата.
Частые неисправности электродвигателей
Отмечают два типа поломок, к которым склонны большинство моделей электрических двигателей. Они могут носить механический и электрический характер.
Они могут носить механический и электрический характер.
Электрические неисправности
Предполагают проблемы в обмотке:
- замыкание между витками;
- замыкание обмотки на корпус;
- механическое повреждение обмотки.
Механические неисправности
Предполагают:
- естественный износ в подшипниках, повешенное трение;
- прокручивание ротора на валу;
- износ корпуса мотора;
- поломка, связанная с повреждением крыльчатки обдува
Чтобы не допускать проблемных ситуаций, пользователю следует позаботиться о своевременной замене подшипников. Важно учитывать их износ, срок эксплуатации мотора. Это же относится к другим деталям. Электрические неисправности требуют только профессионального ремонта, ведь неаккуратное действие со стороны пользователя может потребовать замены всего агрегата.
Как применяются электрические двигатели
На сегодня электродвигатели – основные потребители энергии. Около 50% этого ресурса приходится на различные варианты оборудования. Двигатели широко востребованы во многих сферах промышленности и жизни в целом. Они применяются для работы бытовой техники, производственного оборудования, для транспорта, спецтехники.
Около 50% этого ресурса приходится на различные варианты оборудования. Двигатели широко востребованы во многих сферах промышленности и жизни в целом. Они применяются для работы бытовой техники, производственного оборудования, для транспорта, спецтехники.
Основные направления, в которых используется это оборудование:
- металлообрабатывающие и шлифовальные предприятия;
- деревообрабатывающие заводы, конвейерное производство;
- для изготовления компрессионного, климатического оборудования;
- в строительной сфере – моторы включены в конструкции спецтехники и оборудования для подъёма, опускания строительного оборудования;
- в системах лифтов, в отопительном оборудовании, в системах вентиляции;
- в бытовых устройствах, начиная холодильником, заканчивая уборочной техникой;
- для персональных компьютеров, ноутбуков.
Преимущества электрических двигателей
Это оборудование имеет множество сильных сторон, которые обеспечивают его востребованность:
- относительно простые конструкции;
- простая установка и эксплуатация;
- пригодность к ремонту – благодаря высококачественным компонентам, которые используют производители, современные двигатели способны стабильно работать годами;
- в продаже доступен солидный выбор устройств, отличающихся мощностью и другими техническими характеристиками. Благодаря этому найти вариант под определенное оборудование не составит труда;
- доступность опции регулировки скорости вращения вала мотора;
- высокая скорость функционирования, готовность к запуску и остановке;
- автоматическое управление оборудованием, доступное в большинстве случаев;
- функция реверса;
- для установки и технического обслуживания со стороны пользователя не потребуется крупных финансовых вложений;
- длительный эксплуатационный период;
- высокий коэффициент полезного действия;
- оборудование изготавливается из экологически безопасных материалов и компонентов. Работа двигателя не предполагает негативное влияние на здоровье пользователей и состояние природы.
 Благодаря этому найти вариант под определенное оборудование не составит труда;
Благодаря этому найти вариант под определенное оборудование не составит труда;Но к главному достоинству электрического привода можно отнести возможность его контроля и регулировки, при этом местоположение оборудования не имеет принципиального значения – можно включать и отключать устройство на расстоянии. Эклектический мотор не продуцирует неприятного шума, не способен нанести вреда здоровью человека в отличие от механических аналогов.
Эклектический мотор не продуцирует неприятного шума, не способен нанести вреда здоровью человека в отличие от механических аналогов.
Что такое электродвигатель?
Электродвигатели представляют собой устройства, преобразующие электрическую энергию в механическую, обычно в форме вращательного движения. Проще говоря, это устройства, которые используют электроэнергию для выработки движущей силы.
Электродвигатели не только обеспечивают простое и эффективное средство создания высокой выходной мощности привода, но и их легко уменьшить, что позволяет встраивать их в другие машины и оборудование. В результате они находят широкое применение как в промышленности, так и в повседневной жизни.
Принцип работы
Помнишь, тебя в школе учили правилу левой руки Флеминга? Электродвигатели являются применением этого правила, при этом сила, создаваемая электрическим током, протекающим через катушку в присутствии магнитного поля, заставляет вал двигателя вращаться.
На приведенной ниже диаграмме правило левой руки Флеминга говорит нам, что направленная вверх сила генерируется, когда ток течет перпендикулярно магнитному полю от магнита * .
*
Магнитное поле: Область, в которой присутствует магнитная сила (направленная от северного (N) к южному (S) полюсу магнита).
Как достигается вращение в электродвигателе
В случае щеточного электродвигателя постоянного тока *1 , например, эту силу можно использовать для поддержания непрерывного вращения путем изменения направления тока на каждом полуобороте катушки (что достигается с помощью щеток и коммутатора *2 )
*1
Двигатель постоянного тока: Двигатель, работающий от постоянного тока (DC)
*2
Щетки и коллектор: При совместном использовании они меняют направление тока каждый раз, когда вал двигателя делает пол-оборота.
История электродвигателей
Британский ученый Майкл Фарадей пользуется особым влиянием среди многих ученых 19 века, сыгравших определенную роль в изобретении и разработке электродвигателей. В 1821 году Фарадей провел успешный эксперимент, в котором вращение проволоки осуществлялось с помощью магнита вместе с магнитным полем, создаваемым электрическим током. В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
В 1821 году Фарадей провел успешный эксперимент, в котором вращение проволоки осуществлялось с помощью магнита вместе с магнитным полем, создаваемым электрическим током. В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
Со временем было изобретено множество других типов электродвигателей, а также конструкции, которые можно считать архетипическими двигателями постоянного тока.
Впоследствии, в 1872 году, практический электродвигатель был не столько изобретен, сколько открыт, когда один из генераторов, выставленных на Всемирной выставке в Вене, начал вращаться сам по себе после того, как был случайно подключен к другому генератору. Это привело людей к пониманию того, что то, как работают генераторы, можно использовать и в двигателях. Последовавший за этим быстрый рост практического использования генераторов был таким, что они стали основой многих отраслей промышленности в 20 веке.
Двигатели и генераторы
В то время как электродвигатели преобразуют электрическую энергию во вращение и другие виды механической энергии, генераторы выполняют обратную функцию преобразования механической энергии в электрическую.
Несмотря на эти противоположные функции, двигатели и генераторы очень похожи по конструкции и принципу работы. Фактически, простой эксперимент, в котором два модельных двигателя соединяются вместе, — это все, что нужно, чтобы продемонстрировать, что электрический двигатель может также работать как генератор.
Естественно, учитывая различные способы их использования, два типа машин всегда разрабатывались отдельно.
Типы электродвигателей
Электродвигатели бывают самых разных форм в зависимости от типа используемого тока, конструкции их катушек (обмоток) и того, как они генерируют магнитное поле. Соответственно, их можно классифицировать по различным признакам.
Ниже описаны три типа электродвигателей, обычно используемых как в быту, так и в промышленности.
Двигатели постоянного тока
Это двигатели, приводимые в действие источником постоянного тока. Они подразделяются на щеточные и бесщеточные (BLDC) двигатели в зависимости от того, используют ли они щетки *1 .
В то время как коллекторным двигателям постоянного тока для работы требуется только подключение к источнику питания постоянного тока, бесщеточным двигателям постоянного тока требуется датчик для определения ориентации магнитных полюсов ротора *2 и схема привода для подачи соответствующего тока.
*1
Щетка: Деталь, используемая вместе с коллектором.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
Двигатели переменного тока
Это двигатели, приводимые в действие источником переменного тока. Они сгруппированы в зависимости от того, является ли источник питания однофазным *1 или трехфазным *2 .
Однофазные двигатели далее сгруппированы в конденсаторные двигатели, в которых используется конденсатор *3 для создания крутящего момента, и двигатели с расщепленными полюсами, которые имеют дополнительную катушку (обмотку), называемую экранирующей катушкой *4 .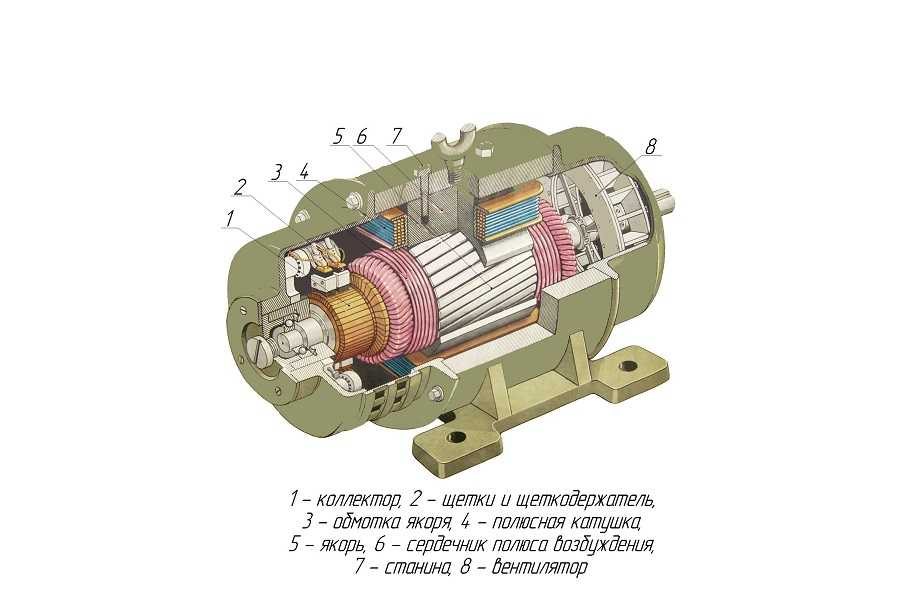
*1
Однофазный: Обычный источник питания переменного тока, обычно доступный в домах.
*2
Трехфазный: тип источника питания переменного тока, используемый в основном в промышленности.
*3
Конденсатор: электронный компонент, хранящий электрическую энергию.
*4
Затеняющая катушка: катушка с замкнутой цепью, намотанная вокруг части сердечника статора.
Шаговые двигатели
Это двигатели, которые вращаются на фиксированный шаг (угол) каждый раз, когда вводится импульс *1 .
Шаговые двигатели можно сгруппировать по структуре их ротора. Двигатели с постоянными магнитами (PM) *2 имеют магнит в роторе *3 , двигатели с переменным сопротивлением (VR) *4 имеют железный сердечник, а гибридные двигатели имеют и то, и другое.
*1
Импульс: Короткий всплеск электричества, производимый включением и выключением источника питания.
*2
Ротор: часть двигателя, которая вращается. Вал двигателя является частью ротора.
*3
Двигатель с постоянными магнитами: Двигатель с постоянным магнитом
.*4
ДвигательVR: двигатель с переменным магнитным сопротивлением, в котором сердечники расположены подобно зубьям шестерни, при этом такое расположение определяет угол шага.

Обзор типов электродвигателей
В таблице ниже перечислены основные характеристики трех различных типов двигателей.
В дополнение к перечисленным выше существует множество других типов электродвигателей.
| Тип | Характеристики |
|---|---|
| Линейный двигатель | Двигатель, скользящий в линейном направлении |
| Ультразвуковой двигатель | Двигатель, приводимый в движение ультразвуковыми колебаниями |
| Двигатель без сердечника | Коллекторный двигатель постоянного тока с ротором без железного сердечника или бесщеточный двигатель со статором без железного сердечника |
| Универсальный двигатель | Двигатель с фазным ротором и фазным статором, работающий как на переменном, так и на постоянном токе |
| Гистерезис двигателя | Двигатель переменного тока, в роторе которого используется материал, обладающий гистерезисом и вращающийся за счет гистерезисного крутящего момента |
| Двигатель SR | Шаговый двигатель VR, который также имеет функцию определения положения ротора, что позволяет избежать потери синхронизации |
Применение двигателей
Хотя электродвигатели используются по-разному, ниже перечислены общие области применения бесщеточных двигателей постоянного тока и шаговых двигателей, поставляемых ASPINA.
Области применения бесщеточных двигателей постоянного тока
Благодаря небольшим размерам, высокой мощности, низкому уровню шума и вибрации, а также длительному сроку службы бесщеточные двигатели постоянного тока находят широкое применение в таких приложениях, как системы вентиляции (очистители воздуха и другие виды кондиционер), бытовая техника, холодильники, водонагреватели, торговые автоматы, копировальные аппараты, принтеры, проекторы, оргтехника, контрольно-измерительные приборы, транспортные средства и медицинские приборы.
- Кондиционеры
- Финансовые терминалы (банкоматы), разменные автоматы, автоматы по обмену валюты, автоматы по продаже билетов
- Бытовая техника
- Чистые помещения
- Водонагреватели и горелки
- Оптические изделия
- Торговые автоматы
- Принтеры
- Морозильные и холодильные витрины
- Копировальные аппараты
- Медицинское оборудование
- Офисное оборудование
- Системы лабораторного анализа
Области применения шаговых двигателей
Превосходная точность остановки, высокий крутящий момент на средних и низких скоростях и превосходная чувствительность шаговых двигателей означают, что они могут использоваться в самых разных приводных устройствах, требующих точного управления.
- Производственное оборудование
- Приводы оптических дисков (приводы Blu-ray, DVD и т. д.)
- Медицинское оборудование
- Лазерные принтеры
- Лабораторные аналитические приборы
- Цифровые камеры
- Банкоматы
- Жалюзи кондиционера
- Торговые автоматы
- Развлекательные автоматы
- Автоматы по продаже билетов
- Копировальные аппараты
- Роботы
Решение проблем с электродвигателями
ASPINA поставляет не только автономные шаговые двигатели, но и системные продукты, включающие системы привода и управления, а также механические конструкции. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым в различных отраслях промышленности, областях применения и потребительских продуктах, а также для ваших конкретных производственных схем.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних стадиях разработки.
Вы боретесь со следующими проблемами?
Выбор двигателя
- У вас еще нет подробных спецификаций или проектных чертежей, но вам нужен совет по двигателям?
- У вас нет штатного специалиста по двигателям, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
Разработка двигателей и связанных с ними компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и заказать приводные системы и разработку двигателей на стороне?
- Хотите сэкономить время и силы на перепроектирование существующих механических компонентов при замене двигателя?
Уникальное требование
- Нужен специальный двигатель для вашего продукта, но ваш обычный поставщик отказался?
- Не можете найти двигатель, который дает вам требуемый контроль, и почти теряете надежду?
Ищете ответы на эти вопросы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Смотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Связанные темы:
- синхронный двигатель линейный двигатель серводвигатель реактивный двигатель серийный двигатель
См. всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что в обмотках статора протекает набор из трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 ток в фазе a максимальный положительный, а в фазах b и c половина отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора.
В данный момент t 1 ток в фазе a максимальный положительный, а в фазах b и c половина отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Энергия и ископаемое топливо
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко друг с другом на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке. Видно, что токи примерно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить требуемую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для мощных двигателей мощностью до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со скоростью изменения во времени магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера.