Инерционный грохот — ГИЛ 13 от производителя
Назначение
Грохот инерционный легкого типа ГЛИ-13 предназначен для разделения по крупности сыпучих материалов с максимальной крупностью кусков питания 300 мм и с объемной массой насыпного груза не более 1,4 т/м3 на операциях обезвоживания, обесшламливания, сухого грохочения (с поверхностной влагой материала не более 5%). Оборудование применяется для работы в закрытых помещениях на дробильно-сортировочных и обогатительных предприятиях в странах с умеренным климатом. Изготавливается в опорном исполнении для условий эксплуатации по УХЛ4 по ГОСТ 15150-69.
Принцип работы грохота
Материал из загрузочной течки поступает на сита грохота и при колебаниях короба транспортируется к разгрузке, одновременно просеиваясь сквозь отверстия сита. Материал, прошедший сквозь отверстия верхнего сита поступает на среднее сито, где совершается аналогичная операция. Материал, прошедший сквозь отверстия нижнего сита, поступает на нижнее сито. Материал, прошедший сквозь отверстия нижнего сита, попадает в воронку для подрешетного продукта. Надрешетный продукт с сит попадает в разгрузочные течки.
Материал, прошедший сквозь отверстия верхнего сита поступает на среднее сито, где совершается аналогичная операция. Материал, прошедший сквозь отверстия нижнего сита, поступает на нижнее сито. Материал, прошедший сквозь отверстия нижнего сита, попадает в воронку для подрешетного продукта. Надрешетный продукт с сит попадает в разгрузочные течки.
Короб грохота, установленный наклонно под углом (10-25 градусов) на опорах, под действием центробежной силы инерции совершает колебательные движения.
Технические характеристики
Наименование параметра | Величина |
Производительность, м3/ч | зависит от вида материала и условий грохочения |
Размер просеивающей поверхности | |
ширина, мм длина, мм | 750 1750 |
Площадь просеивающей поверхности одного яруса, м2 | 1,2 |
Число ярусов сит | 3 |
Тип просеивающих поверхностей | |
|
размеры отверстий определяются заказчиком |
Кинематические параметры | |
Амплитуда колебаний короба, мм | 3 — 4 |
Частота колебаний ,Гц | 16 |
Габаритные размеры колеблющейся части грохота | |
длина, мм | 1920 |
ширина, мм | 1050 |
высота, мм | 1295 |
Масса колеблющейся части грохота, кг | 400 |
Угол наклона короба, ° | 10-25 |
Мощность двигателя, кВт | 1,5 |
Вернуться к списку
Грохоты инерционные самобалансные ГИСТ, ГИСЛ
Грохоты предназначены для грохочения сыпучих материалов с объемной массой насыпного груза 1,2…2,8 т/м3 (1,2 т/м3. – легкие самобалансные, 2,8 т/м3 – тяжелые самобалансные) при угле наклона 0…25 градусов, применяются на операциях обезвоживания, обесшламливания мокрого и сухого, грохочения каменных углей, антрацитов, руды и горючих сланцев, а также отмыва суспензии от продуктов обогащения.
– легкие самобалансные, 2,8 т/м3 – тяжелые самобалансные) при угле наклона 0…25 градусов, применяются на операциях обезвоживания, обесшламливания мокрого и сухого, грохочения каменных углей, антрацитов, руды и горючих сланцев, а также отмыва суспензии от продуктов обогащения.
Грохоты изготавливаются как в опорном, так и в подвесном исполнении.
По желанию заказчика поставляется с вибратором на жидкой или густой смазке.
Имеем возможность изготовления грохотов по техническому заданию заказчика.
Грохоты самобалансные с одним ярусом сит
Наименование параметра и размера | ГИСТ-41 | ГИСТ-61 | ГИСТ-61М |
Производительность по исходному материалу, т/ч | 125 | 100…400 | 125 |
Размеры просеивающей поверхности, мм, не более | |||
ширина | 1500 | 2000 | 1920 |
длина | 4400 | 5250 | 4400 |
Угол наклона просеивающей поверхности, градус | 0…10 | 0…10 | 0…10 |
Площадь просеивающей поверхности, м2 | 6,6 | 10,5 | 8,4 |
Номинальная мощность электродвигателя, кВт | 2х7,5 | 2х15 | 2х7,5 |
Габаритные размеры колеблющейся части грохота, мм, не более | |||
длина | 4400 | 5765 | 4400 |
ширина | 2270 | 2530 | 2604 |
высота | 1735 | 2060 | 1733 |
Масса грохота, кг, не более | 4430 | 9000 | 4950 |
Грохоты самобалансные с двумя ярусами сит
| ГИСТ-52 | ГИСТ-52М | ГИСТ-72 | ГПКТ-72 | ГИСТ-82 |
Размеры просеивающей поверхности, мм, не более | |||||
ширина | 1750 | 1750 | 2500 | 2500 | 3040 |
длина | 5400 | 6450 | 6675 | 7200 | 7990 |
Пощадь просеивающей поверхности, м2 | 9,45 | 10,2 | 16,6 | 18 | 22,5 |
Номинальная мощность электродвигателя, кВт | 2х15 | 2х15 | 2х22 | 2х22 | 2х37 |
Габаритные размеры колеблющейся части грохота, мм, не более | |||||
длина | 5700 | 6400 | 6810 | 7875 | 8200 |
ширина | 2450 | 2170 | 3487 | 4550 | 4250 |
высота | 2570 | 2180 | 2420 | 3150 | 2700 |
Масса грохота, кг, не более | 9300 | 7500 | 14900 | 17800 | 20150 |
| ГИСЛ-32 | ГИСЛ-42 | ГИСЛ-62У | ГИСЛ-72 | ГИСЛ-82А | |||
Размеры просеивающей поверхности, мм, не более | ||||||||
ширина | 1200 | 1500 | 2000 | 2500 | 3040 | |||
длина | 4900 | 5605 | 5600 | 6890 | 7990 | |||
Пощадь просеивающей поверхности, м2 | 5,8 | 8,4 | 10,9 | 16,6 | 22,5 | |||
Номинальная мощность электродвигателя, кВт | 2х15 | 2х15 | 2х15 | 2х22 | 2х37 | |||
Габаритные размеры колеблющейся части грохота, мм, не более | ||||||||
длина | 5700 | 5700 | 5700 | 6970 | 8200 | |||
ширина | 2330 | 2530 | 2700 | 3760 | 4250 | |||
высота | 2460 | 2461 | 2650 | 2500 | 2700 | |||
Масса грохота, кг, не более | 6920 | 7680 | 9445 | 17800 | 17500 | |||
Грохоты инерционные среднего типа (ГИС)
Главная » Продукция » Грохоты » Грохоты инерционные среднего типа (ГИС)
Благодаря своим превосходным характеристикам, высокой производительности при минимальных затратах электроэнергии, а также простоте эксплуатации и прочности конструкции, грохоты инерционные средние сегодня пользуются большой популярностью. От аналогичного оборудования других категорий их отличает несколько особенностей, которые непременно следует учитывать при работе с ГИС. Такая техника предназначена для промежуточного и товарного разделения на разноразмерные фракции насыпного сырья. При этом для подачи обычно используются: песок, щебень, гравий и иные материалы неметаллорудного происходнения. Для грохочения не рекомендуется использовать сырье, размер каждого куска которого в диаметре превышает 200 мм. А допустимая влажность при работе с грохотом инерционным среднего типа должна быть не более 5% при общих объемах перерабатываемого сырья — до 1,8 тонн на кубометр рабочей площади. Если же возникает необходимость «мокрого» грохочения, то крупность каждого куска может доходить и до 250 мм.
От аналогичного оборудования других категорий их отличает несколько особенностей, которые непременно следует учитывать при работе с ГИС. Такая техника предназначена для промежуточного и товарного разделения на разноразмерные фракции насыпного сырья. При этом для подачи обычно используются: песок, щебень, гравий и иные материалы неметаллорудного происходнения. Для грохочения не рекомендуется использовать сырье, размер каждого куска которого в диаметре превышает 200 мм. А допустимая влажность при работе с грохотом инерционным среднего типа должна быть не более 5% при общих объемах перерабатываемого сырья — до 1,8 тонн на кубометр рабочей площади. Если же возникает необходимость «мокрого» грохочения, то крупность каждого куска может доходить и до 250 мм.
| Модель | Размер просеивающей поверхности, мм | Число ярусов сит | Производительность, м³/ч |
| ГИС-21 | 900х1600 | 1 | 20 |
| ГИС-22 | 900х1600 | 2 | 30 |
| ГИС-31 | 1250х3000 | 1 | 60 |
| ГИС-32 | 1250х3000 | 2 | 70 |
| ГИС-33 | 1250х3000 | 3 | 80 |
| ГИС-41 | 1500х4000 | 1 | 95 |
| ГИС-42 | 1500х4000 | 2 | 100 |
| ГИС-43 | 1500х4000 | 3 | 110 |
| ГИС-51 | 1750х4000 | 1 | 165 |
| ГИС-52 | 1750х4500 | 2 | 175 |
| СМД-121 | 1750х5000 | 2 | 200 |
| ГИС-53 | 1750х4500 | 3 | 190 |
| ГИС-61 | 2000х6000 | 1 | 250 |
| ГИС-62 | 2000х6000 | 2 | 265 |
| ГИС-63 | 2000х6000 | 3 | 280 |
Следующий раздел Грохоты инерционные тяжелого типа .
Грохот инерционный ГИЛ, ГИТ, ГИС от производителя
Технические характеристики установок типа ГИЛ
| МОДЕЛЬ СУ | ПАРАМЕТРЫ | |||||||
|
ПРОИЗВОДИ-ТЕЛЬНОСТЬ*, ТН/ЧАС |
КРУПНОСТЬ ПРОДУКТА, ММ | КОЛ-ВО СЕТОК, ШТ. | УСТАНОВЛЕННАЯ МОЩНОСТЬ, КВТ | МАССА ДО, ТН | ДЛИННА, ММ | ШИРИНА, ММ | ВЫСОТА, ММ | |
| С-600 | 10 | 60 | 1-3 | 0,75-0,9 | 0,45 | 2000 | 1200 | 1450 |
| С-1000 | 25 | 60 | 1-3 | 1,5-2,0 | 1,35 | 2750 | 1800 | 1800 |
| С-1250 | 35 | 60 | 1-3 | 2,2-2,5 | 1,75 | 3460 | 2100 | 2150 |
| С-1500 | 50 | 60 | 1-3 | 2,2-2,7 | 2,85 | 3750 | 2400 | 2250 |
| С-2000 | 100 | 60 | 1-3 | 4,0-5,0 | 3,45 | 4300 | 2900 | 2300 |
Грохот инерционный типа ГИЛ — устройство для сортировки мелкого сыпучего материала на первой стадии машинной обработки или после дробления. Машина оборудована электрическим двигателем, который приводит в действие механизм линейно-кругового движения рабочей части. Получившие импульс частицы песчано-гравийной смеси или несортированного щебня, угля, других материалов, распределяются по массе и размерам и классифицируются по фракциям. Эффективность использования машины может быть повышена за счет использования нескольких ярусов просеивания.
Машина оборудована электрическим двигателем, который приводит в действие механизм линейно-кругового движения рабочей части. Получившие импульс частицы песчано-гравийной смеси или несортированного щебня, угля, других материалов, распределяются по массе и размерам и классифицируются по фракциям. Эффективность использования машины может быть повышена за счет использования нескольких ярусов просеивания.
Преимущества и возможности инерционного грохота легкого типа
- устройство может использоваться самостоятельно или в составе дробильно-сортировочной установки;
- при работе машины происходит промежуточное разделение сырья в виде отдельных зерен, кусков, сыпучей среды;
- установка может использоваться в составе технологической цепочки на предприятиях для просеивания песка, изготовления ингредиентов строительных смесей, сортировки измельченного мусора и строительных отходов;
- при работе машины создается минимальная вибрационная и шумовая нагрузка, отсутствует выброс пыли.

Простота конструкции и возможность непрерывной работы с постоянной или ритмичной подачей сырья позволяют организовать процесс с минимальными затратами энергии. При необходимости грохот ГИЛ и ГИС устанавливаются на фундаменты и массивные опоры с болтовым или анкерным креплением. Цена грохота зависит от выбранной модели и производительности.
Предлагаем купить грохот типа ГИЛ для сортировки сыпучего и комбинированного сырья. Организуем доставку и предоставим полный пакет документов от производителя.
Вибрационные грохоты. Виды грохотов
Вибрационные грохоты. История
Первые указания на использование технологии грохочения содержатся на египетских настенных рисунках, датирующихся 1500 г. до н.э. С приходом бронзового века грохочению начинают подвергаться пигмены, соль, металлические руды и уголь, а спустя какой-то промежуток времени под сортировку попадают неметаллические руды и разнообразные химические компоненты. Во время европейской научно-технической революции (в конце 17 в.) растет популярность грохотов для сухой сепарации. А с конца 19 в. предпочтение при грохочении минеральных материалов отдается ситовым моделям, предшественникам существующих плоских вибрационных аналогов.
Во время европейской научно-технической революции (в конце 17 в.) растет популярность грохотов для сухой сепарации. А с конца 19 в. предпочтение при грохочении минеральных материалов отдается ситовым моделям, предшественникам существующих плоских вибрационных аналогов.
Источник фото: voscem.ruВибрационный колосниковый грохот
Дальнейшее техническое развитие шло по пути появления грохотов с более сильным вибрационным оборудованием для получения большего числа мелких фракций сортируемого материала. Новое мощное виброоборудование позволяло достигать рабочих скоростей приводов в 700-3 000 оборотов в минуту и амплитуды вибрации поверхности просеивания менее 10 мм.
Виды современных вибрационных грохотов
Современные вибрационные грохоты бывают эксцентриковые (или гирационные с приводом от эксцентрикового механизма) и инерционные, имеющие привод от вибратора. К последним относят такие вибрационные модели, как резонансные.
Источник фото: avanta-yug.ruВибрационные грохоты бывают эксцентриковые и инерционные
Рабочее снаряжение вибрационных инерционных грохотов состоит из сита или из решет, жестко зафиксированных в коробе, куда подаются циклические колебания, благодаря чему и перемещается, встряхивается и распределяется материал на фракции. Сита, как правило, размещают в 2-3 ячейки, каждое нижнее имеет ячейки поменьше. Что касается рабочей плоскости, то сита изготавливаются из стальной проволочной сетки, а решета — из штампованного стального листа с отверстиями либо из комплекта колосников из стали, резины или пластмассы.
Сита, как правило, размещают в 2-3 ячейки, каждое нижнее имеет ячейки поменьше. Что касается рабочей плоскости, то сита изготавливаются из стальной проволочной сетки, а решета — из штампованного стального листа с отверстиями либо из комплекта колосников из стали, резины или пластмассы.
Рабочий орган эксцентрикового вибрационного грохота также имеет подвижный короб с 1, 2 или 3 ситами и 4 подшипника, 2 из них закрепляются на неподвижной раме.
Источник фото: stmpo.ruРабочее снаряжение вибрационного грохота состоит из сита или из решет
Габариты просеивающей поверхности, а также форма и размеры отверстий воздействуют на показатели грохочения. Просеивающую поверхность установок для строительной отрасли характеризует коэффициент ширины и длины (1:2,5). У колосниковых грохотов тяжелого класса это соотношение равняется 1:2. Производительность работы оборудования напрямую зависит от площади сита при соотношении 1:2,5.
Вибрационные грохоты бывают наклонными и горизонтальными (отличаются расположением просеивающей поверхности).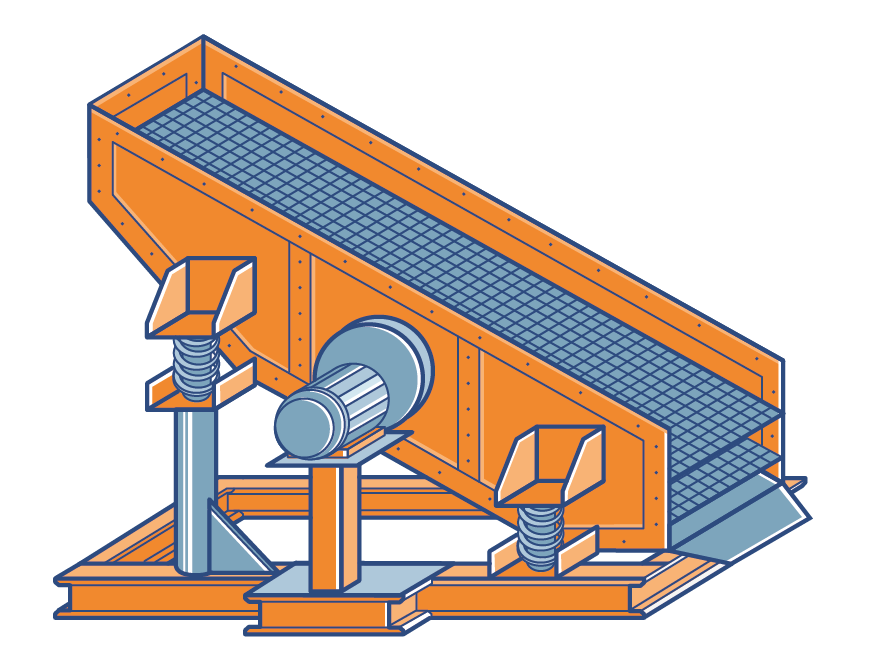 Горизонтальные сортируют сырье без помощи гравитации. Движение происходит под наклоном около 45 градусов к горизонтали.
Горизонтальные сортируют сырье без помощи гравитации. Движение происходит под наклоном около 45 градусов к горизонтали.
Источник фото: stmpo.ruПроизводительность грохотов напрямую зависит от площади сита
Работа наклонных грохотов обеспечивается вибрационным круговым движением в вертикальном положении.
Источник фото: conn-weld.comВибрационные наклонные грохоты выполняют грохочение товарных фракций щебня и гравия
С помощью вибрационных наклонных эксцентриковых и инерционных грохотов выполняют грохочение товарных фракций щебня и гравия. При этом эксцентриковые машины оказываются продуктивнее прочих в тяжелых условиях работы на промежуточных процессах. Независимо от величины нагрузки, эксцентриковые обеспечивают стабильность амплитуды колебаний короба. К тому же их легче виброизолировать.
Что же касается инерционных горизонтальных грохотов, то они в основном применяются в мобильных дробильно-сортировочных установках, которые, несмотря на компактность сит, показывают высокие показатели грохочения. В составе установок инерционные горизонтальные грохоты с колосниковыми решетами используются для предварительной сортировки материалов. Если в рабочем оборудовании машины установлены стальные проволочные сита или решета из штампованного стального листа с отверстиями, то оборудование применяется для товарной и промежуточной сортировки.
В составе установок инерционные горизонтальные грохоты с колосниковыми решетами используются для предварительной сортировки материалов. Если в рабочем оборудовании машины установлены стальные проволочные сита или решета из штампованного стального листа с отверстиями, то оборудование применяется для товарной и промежуточной сортировки.
Источник фото: dic.academic.ruИнерционный горизонтальный грохот
Многообещающей техникой считают резонансные вибрационные грохоты. Эти машины требуют меньшей мощности привода, к тому же уравновешенность их масс дает возможность производить модели с большими просеивающими поверхностями. Однако на данный момент самой известным типом техники являются инерционные разработки. По мнению специалистов, инерционные наклонные грохоты намного надежнее и неприхотливее в эксплуатации, чем другие типы. Инерционные аналоги очень эффективны при рассортировке сыпучих материалов.
В соответствии с ГОСТом 5526-67 инерционные грохоты делятся по массе сортируемого груза на легкие (ГИЛ), средние (ГИС) и тяжелые (ГИТ). При маркировке техники употребляются буквы и цифры. Например, ГИС-52. ГИС — модель инерционный средний. Первое число (5) означает длину машины. Кстати, наибольшее применение получили вибрационные грохоты длиной 4,5 м. Цифра 2 обозначает количество сит, которое зависит от работы и от величины материала, получаемого после грохочения. От производительности и площади просеиваемой поверхности зависит длина сит.
При маркировке техники употребляются буквы и цифры. Например, ГИС-52. ГИС — модель инерционный средний. Первое число (5) означает длину машины. Кстати, наибольшее применение получили вибрационные грохоты длиной 4,5 м. Цифра 2 обозначает количество сит, которое зависит от работы и от величины материала, получаемого после грохочения. От производительности и площади просеиваемой поверхности зависит длина сит.
Источник фото: detalima6in.ruГрохот инерционный средний 52
ЗАО «Дробмаш» Выкса официальный сайт
Инерционные грохоты «ДРОБМАШ» широко применяются для промежуточного, контрольного и товарного грохочения.
Инерционные грохоты обладают свойством «самозащиты» от перегрузок, так как при увеличении нагрузки амплитуда колебаний короба автоматически уменьшается и нагрузка на подшипники практически остается постоянной. Это свойство позволяет использовать их для грохочения крупнокускового материала.
«ДРОБМАШ» изготавливает инерционные грохоты нескольких типов. Количество рядов сит может варьироваться от 2 до 5 в зависимости от модели грохота. Новая разработка — трехситный грохот с промывочным устройством для мойки щебня непосредственно на грохоте. Мойка щебня осуществляется специальными форсунками, устанавливаемыми над ситами и обеспечивающими подачу воды на материал узким веером, что обеспечивает эффективность промывки. Грохот поставляется только в виде агрегата ДРО-701 (в составе агрегата входит грохот ДРО-662-10 — на опорной металлоконструкции, с площадками обслуживания).
Количество рядов сит может варьироваться от 2 до 5 в зависимости от модели грохота. Новая разработка — трехситный грохот с промывочным устройством для мойки щебня непосредственно на грохоте. Мойка щебня осуществляется специальными форсунками, устанавливаемыми над ситами и обеспечивающими подачу воды на материал узким веером, что обеспечивает эффективность промывки. Грохот поставляется только в виде агрегата ДРО-701 (в составе агрегата входит грохот ДРО-662-10 — на опорной металлоконструкции, с площадками обслуживания).
|
Модель |
Тип |
Размер |
Число |
Угол накло- |
Размер |
Размер |
Мощ- |
Масса, |
Габарит- ные размер L x b x h, мм |
|
ДРО-607М |
ГИС- 43 |
1500х4000 |
3 |
12-18 |
100 |
5х20, 10х10, 20х20 |
11 |
4,3 |
4900х3000 |
|
СМД-148А-М |
ГИС- 42 |
1500х4250 |
2 |
12-18 |
250 |
40х40, 70х70 |
11 |
4,07 |
5260х3000 |
|
СМД-148А |
ГИС- 42 |
1500х4250 |
2 |
12-18 |
100 |
5х20, 20х20 |
11 |
4,1 |
5260х3000 |
|
ДРО-662-20 |
ГИС- 54 |
1750х5000 |
4 |
12-18 |
100 |
5х20, 10х10, 15х15, 20х20 |
15 |
6,6 |
5600х3300 |
|
ДРО-662-30 |
ГИС- 53 |
1750х5000 |
3 |
12-18 |
100 |
5х20, 10х10, 20х20 |
15 |
6,1 |
5600х3300 |
|
ДРО-662-40 |
ГИС-53 |
1750х5000 |
3 |
12-18 |
200 |
20х20, 40х40, 70х70 |
15 |
6,32 |
5650х3300 |
|
ДРО-688-40 |
ГИС- 52 |
1750х5000 |
2 |
12-18 |
100 |
5х20, 20х20 |
15 |
4,9 |
5630х3300 |
|
ДРО-688-50 |
ГИС- 52 |
1750х5000 |
2 |
12-18 |
200 |
40х40, 70х70 |
15 |
4,9 |
5630х3300 |
|
Масса без ЗИП |
|||||||||
ИНЕРЦИОННЫЕ ГРОХОТА С ПОВЫШЕННОЙ ЧАСТОТОЙ ВИБРАЦИИ
C 2020года ЗАО «Дробмаш» освоил выпуск модельного ряда инерционных грохотов с повышенной частотой вибрации ДРО-Д, предназначенных для качественной и точной сортировки по фракциям песочно-сортировочной смеси.
Технические параметры представлены в таблице
Другие типы сортировочного оборудования:
Строммашина — Грохоты инерционные
Грохоты наклонные инерционные предназначаются для грохочения щебня, песка, гравия и других сыпучих материалов. Грохот представляет собой набор сит, которые обеспечивают сортировку сыпучих материалов по размерам (фракциям).
Принцип работы грохота инерционного
Принцип работы грохота основан на использовании вибрационных процессов, возникающих в результате вращения неуравновешенных масс – дебалансов. Рабочий материал подбрасывается на ситах, мелкие фракции проходят сквозь сито, а крупные скатываются по наклонной поверхности.
Типы грохотов
- инерционные и наклонные, с круговым движением короба.
- самобаластные горизонтальные
- полувибрационные (гирационные)
- инерционные грохоты с направленными колебаниями.
Наиболее простыми и надежными в эксплуатации являются инерционные наклонные грохоты.
Группа компаний «Строммашина» для обеспечения более высокой эффективности грохочения в зависимости от размера фракций готового продукта предлагает наклонные инерционные грохоты трех типов: «МЩ», «СЩ», «КЩ». Для каждого типа подобран свой динамический режим (размер амплитуды и число оборотов вала вибратора, масса дебалансов).
Формы и материалы, используемые для решет и сит
В ситах и решетах для инерционных грохотов отверстия могут быть прямоугольной круглой или квадратной формы. При использовании засоренных глиной или влажных материалов применяют сита с прямоугольными отверстиями. При наличии круглых отверстий в сите получаемый продукт более равномерен и однороден. В целях повышения сроков эксплуатации сит для их изготовления используют канилированую стальную проволоку высокой прочности, резину, полиуретан и т.д.
Область применения инерционных грохотов.
Грохоты применяются как отдельный вид оборудования, так и в различных дробильных линиях и агрегатах. Чаще всего грохоты инерционные используются для среднего и мелкого грохочения. Грохоты обеспечивают высокую эффективность сортировки сыпучих материалов.
Чаще всего грохоты инерционные используются для среднего и мелкого грохочения. Грохоты обеспечивают высокую эффективность сортировки сыпучих материалов.
Основные преимущества инерционных грохотов
- низкая энергоемкость и затраты на обслуживание
- простота конструкции
- длительный срок службы узлов грохота
- возможность осуществления ремонта.
| Типы грохотов | Разделительная область (размер ячеек сит), мм | Крупность кусков питания, мм, не более | Угол наклона сита, градус | Амплитуда (полуразмах колебаний короба), мм | Частота колебаний короба, мин |
|---|---|---|---|---|---|
| МЩ-для рассева мелких зёрен | 3 — 20 | 80 — 100 | 12 — 18 | 3,2 — 3,8 | 970 — 1200 |
| СЩ-для рассева средних зёрен | 20 — 50 | 150 | 12 — 21 | 3,5 — 4,5 | 970 |
| КЩ-для рассева крупных зёрен | 40 — 100 | 350 | 15 — 24 | 4,5 — 6,0 | 730 — 850 |
Технические характеристики грохотов для мелких зёрен
| Обозначение по ТУ | Обозначене по КД | Плащадь рассеивающей поверхности, м2 | Производительность расчётная | Число ярусов | Макс. крупность кусков питания, мм крупность кусков питания, мм | Номинальная мощность эл. Двиг., кВт не более | Масса,т | ||
|---|---|---|---|---|---|---|---|---|---|
| Размер ячеек сит, мм | м3/час | Колебающиеся части грохота | Общая (без зап. частей) | ||||||
| ГИС-0,8×1,9×2-МЩ | СБ-168.05.00.000-03 | 1,5 | 5-20 | 6-20 | 2 | 80 | 2,2 | 0,4 | 0,7 |
| ГИС-1,0×3,0x2-МЩ | 847.00.000 | 3,0 | 3-20 | 6,5-40 | 2 | 80 | 5,5 | 2.1 | 2,4 |
| ГИС-1,25×3,0x2-МЩ | 847.00.000-01 | 3,7 | 3-20 | 8,5-50 | 2 | 80 | 5,5 | 2,2 | 2,8 |
| ГИС-1,5×3,0x2-МЩ | 847. 00.000-02 00.000-02 |
4,5 | 3-20 | 10-60 | 2 | 80 | 5,5 | 2,4 | 2,9 |
| ГИС-1,0×4,0x2-МЩ | 847.00.000-03 | 4,0 | 3-20 | 9-55 | 2 | 80 | 5,5 | 2,5 | 3,0 |
| ГИС-1,25×4,0x2-МЩ | 847.00.000-04 | 5,0 | 3-20 | 11-70 | 2 | 80 | 7,5 | 2,8 | 3,4 |
| ГИС-1,5×4,0x2-МЩ | 847.00.000-05 | 6,0 | 3-20 | 13-80 | 2 | 80 | 7,5 | 3,0 | 3,6 |
| ГИС-1,75×4,0x2-МЩ | СМД-121В | 7,0 | 5-20 | 11-30 | 2 | 80 | 15 | 4,4 | 4,8 |
| ГИС-1,75×5,0x2-МЩ | СМД-121АЭ | 8,7 | 5-20 | 33-120 | 2 | 80 | 15 | 4,2 | 4,5 |
| ГИС-1,25×3,5×3-МЩ | ГИС-33 | 4,3 | 5-20 | 17-60 | 3 | 100 | 11 | 3,3 | 3,7 |
| ГИС-1,5×4,0x3-МЩ | ГИС-43 | 6,0 | 5-20 | 23-80 | 3 | 100 | 11 | 4,0 | 4,5 |
| ГИС-1,5×3,2×4-МЩ | ГИС-44 | 1,9 | 5-20 | 30 | 4 | 100 | 11 | 3,3 | 3,6 |
| ГИС-1,75×5,0x4-МЩ | ГИС-53 | 8,7 | 5-20 | 33-120 | 3 | 100 | 15 | 5,1 | 5,5 |
| ГИС-2,0×6,0x3-МЩ | ГИС-63 | 12,0 | 5-20 | 46-165 | 3 | 100 | 22 | 7,8 | 8,3 |
Технические характеристики грохотов для средних зёрен
| Обозначение по ТУ | Обозначене по КД | Плащадь рассеивающей поверхности, м2 | Производительность расчётная | Число ярусов | Макс. крупность кусков питания, мм крупность кусков питания, мм | Номинальная мощность эл. Двиг., кВт не более | Масса,т | ||
|---|---|---|---|---|---|---|---|---|---|
| Размер ячеек сит, мм | м3/час | Колебающиеся части грохота | Общая (без зап. частей) | ||||||
| ГИС-0,8×1,9×2-СЩ | СБ-168.05.00.000 | 1,5 | 20-40 | 20-30 | 2 | 150 | 3 | 0,4 | 0,7 |
| ГИС-1,25×3,5×2-СЩ | СМД-225 | 4,3 | 20-40 | 60-85 | 2 | 150 | 7,5 | 2,3 | 2,4 |
| ГИС-1,5×3,75×2-СЩ | СМД-148 | 5,6 | 20-40 | 75-110 | 2 | 150 | 11 | 3,4 | 3,8 |
| ГИС-1,5×3,75×2-СЩ | СМД-148А | 6,3 | 20-40 | 85-12 | 2 | 150 | 11 | 3,6 | 4,2 |
| ГИС-1,75×4,5×2-СЩ | СМД-121 | 7,8 | 20-40 | 105-155 | 2 | 150 | 15 | 4,0 | 4,4 |
| ГИС-1,75×5,0x2-СЩ | СМД-121А | 8,7 | 20-40 | 120-175 | 2 | 150 | 15 | 4,2 | 4,5 |
| ГИС-2,0×5,0x2-СЩ | СМД-125 | 10,0 | 20-40 | 135-200 | 2 | 150 | 15 | 5,7 | 6,0 |
| ГИС-2,0×6,0x2-СЩ | СМД-125А | 12,0 | 20-40 | 145-220 | 2 | 150 | 22 | 6,6 | 7,2 |
Технические характеристики грохотов для крупных зёрен
| Обозначение по ТУ | Обозначене по КД | Плащадь рассеивающей поверхности, м2 | Производительность расчётная | Число ярусов | Макс. крупность кусков питания, мм крупность кусков питания, мм | Номинальная мощность эл. Двиг., кВт не более | Масса,т | ||
|---|---|---|---|---|---|---|---|---|---|
| Размер ячеек сит, мм | м3/час | Колебающиеся части грохота | Общая (без зап. частей) | ||||||
| ГИС-1,5×3,0x1-КЩ | СМД-113 | 4,5 | Щель 85 | 250 | 1 | 700 | 15 | 5,0 | 5,6 |
| ГИС-1,5×3,0x2-КЩ | 865.00.000 | 3,7 | 40-70 | 90-125 | 2 | 350 | 11 | 2,7 | 3,1 |
| ГИС-1,25×3,0x2-КЩ | 865.00.000-01 | 4,5 | 40-70 | 110-150 | 2 | 350 | 11 | 3,0 | 3,4 |
| ГИС-1,75×4,0x2-КЩ | 865.00.000-02 | 7,0 | 40-70 | 175-230 | 2 | 350 | 15 | 4,0 | 4,5 |
| ГИС-1,5×4,0x2-КЩ | 865. 00.000-03 00.000-03 |
6,0 | 40-70 | 150-200 | 2 | 350 | 11 | 3,8 | 4,2 |
| ГИС-1,25×4,0x2-КЩ | 865.00.000-04 | 5,0 | 40-70 | 125-160 | 2 | 350 | 11 | 3,6 | 4,0 |
| ГИС-1,0×3,0x2-КЩ | 865.00.000-05 | 3,0 | 40-70 | 75-100 | 2 | 350 | 11 | 2,4 | 2,8 |
Инерционные датчики SmartWatch непрерывно отслеживают реальные двигательные колебания при болезни Паркинсона
Наблюдение за болезнью Паркинсона
Смарт-часы могут фиксировать непрерывную двигательную активность и физиологические показатели и могут быть полезны для удаленного наблюдения за пациентом. Полномочия и др. . разработала систему амбулаторного мониторинга на основе умных часов для отслеживания дискинезии и тремора в состоянии покоя у пациентов с болезнью Паркинсона. Тремор и дискинезия, обнаруженные умными часами, соответствовали оценкам клиницистов во время посещений клиники.Система на основе умных часов может выявлять изменения в симптомах, возникающие в результате лучшего соблюдения режима лечения или лечения с глубокой стимуляцией мозга, а также субклинические симптомы, предполагающие необходимость альтернативного лечения или титрования лекарств. Это исследование демонстрирует потенциальную полезность удаленного мониторинга болезни Паркинсона с помощью умных часов.
Тремор и дискинезия, обнаруженные умными часами, соответствовали оценкам клиницистов во время посещений клиники.Система на основе умных часов может выявлять изменения в симптомах, возникающие в результате лучшего соблюдения режима лечения или лечения с глубокой стимуляцией мозга, а также субклинические симптомы, предполагающие необходимость альтернативного лечения или титрования лекарств. Это исследование демонстрирует потенциальную полезность удаленного мониторинга болезни Паркинсона с помощью умных часов.
Abstract
Продольный дистанционный мониторинг двигательных симптомов при болезни Паркинсона (БП) может помочь в принятии более точных решений о лечении.Мы разработали Монитор моторных колебаний при болезни Паркинсона (MM4PD), систему амбулаторного мониторинга, в которой используются инерционные датчики умных часов для непрерывного отслеживания колебаний тремора в покое и дискинезии. Мы разработали и проверили MM4PD на 343 участниках с PD, включая продольное исследование продолжительностью до 6 месяцев в когорте из 225 участников. Измерения MM4PD коррелировали с клиническими оценками тяжести тремора (ρ = 0,80) и сопоставлялись с экспертными оценками наличия дискинезии ( P <0.001) во время работы в клинике. MM4PD фиксировал изменения симптомов в ответ на лечение, которые соответствовали ожиданиям врача у 94% обследованных субъектов. В оставшихся 6% случаев данные о симптомах MM4PD выявили возможности для улучшения фармакологической стратегии. Эти результаты демонстрируют перспективность MM4PD в качестве инструмента для поддержки коммуникации между пациентом и клиницистом, титрования лекарств и дизайна клинических испытаний.
- Copyright © 2021 Авторы, некоторые права защищены; эксклюзивный лицензиат Американской ассоциации содействия развитию науки.Нет претензий к оригинальному правительственному предприятию США
Инерционный линейный вибрационный грохот типа 2PWb
Конструкция грохотов линейных вибрационных с инерционным приводом — закрытого, коробчатого типа.
Вопрос о продукте
Грохот вибрационный инерционный линейный типа 2PWb
* поля обязательные для заполнения
Преимущества:
- возможность получения до 4 различных фракций
- Процесс пыленепроницаемого грохочения
- Трубки пылеудаления
- дополнительно используются самоочищающиеся деки для мелких фракций №
Грохот вибрационный линейный с инерционным приводом типа 2ПВб предназначен для просеивания различных сыпучих материалов на любые фракции в зависимости от количества используемых сит и размеров ячеек.
Описание оборудования: Конструкция грохотов линейных с инерционным приводом закрытого, коробчатого типа. Заряд и разряд экранов связаны с установкой через эластичные соединители, что обеспечивает полную пыленепроницаемость процесса просеивания. Структура экрана позволяет использовать его при установке на амортизаторах AG или на амортизаторах AGW. Метод настройки не влияет на процесс проверки. Зоны экранирования, сделанные из перфорированного листового металла, проволочной сетки или других материалов, растягиваются в поперечном или продольном направлении с помощью винтов.Требуемая точность грохочения может быть достигнута регулировкой количества корма, наклона грохота и изменения амплитуды вибрации. Электроподключение электровибратора должно производиться так же, как и в случае электродвигателя с идентичными электрическими параметрами.
По желанию Заказчика все элементы, контактирующие с подаваемым материалом, могут быть выполнены из нержавеющей стали или других материалов.
Для оптимального подбора оборудования обращайтесь в технический офис по тел.: +48 77/470 04 97.
Галерея
Действительность и надежность нового инерционного устройства для мониторинга диапазона движения таза во время полового акта
Int J Environ Res Public Health. 2020 Apr; 17 (8): 2884.
Хосе М. Олива-Лозано
1 Центр медицинских исследований, Университет Альмерии, 04120 Альмерия, Испания; se.lau@809loj
Изабель Мартин-Фуэнтес
2 Лаборатория кинезиологии, биомеханики и эргономики (KIBIOMER Lab.), Центры исследований, Университет Альмерии, 04120 Альмерия, Испания; se.lau@209fmi
José M. Muyor
1 Центр медицинских исследований, Университет Альмерии, 04120 Альмерия, Испания; se.lau@809loj
2 Лаборатория кинезиологии, биомеханики и эргономики (KIBIOMER Lab.), Исследовательская центральная служба, Университет Альмерии, 04120 Альмерия, Испания; se.lau@209fmi
1 Центр медицинских исследований, Университет Альмерии, 04120 Альмерия, Испания; se.lau @ 809loj 2 Лаборатория кинезиологии, биомеханики и эргономики (KIBIOMER Lab.), Исследовательская центральная служба, Университет Альмерии, 04120 Альмерия, Испания; se.lau@209fmiПоступило 10.02.2020 г .; Принято 21 апреля 2020 г.
Лицензиат MDPI, Базель, Швейцария. Эта статья — статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution (CC BY) (http://creativecommons.org/licenses/by/4.0/). Эта статья цитировалась другими статьями в PMC. .Abstract
Чтобы понять физические требования полового акта, необходимо контролировать кинематические параметры этой активности с использованием относительно неинвазивных технологий. Цели этого исследования — проанализировать достоверность и надежность инерционного устройства для мониторинга диапазона движений таза во время имитации полового акта и сравнить диапазон движений (ROM). За 26 взрослыми наблюдали во время полового акта с помощью инерциального устройства (WIMU) и системы захвата движения (золотой стандарт) в тесте, который состоял из 4 наборов по 20 имитированных циклов входа-выхода (IOC) в миссионерской позе и позе наездницы.Мужчины и женщины тестировались отдельно в лабораторных условиях для моделирования целей полового акта. Не было различий между WIMU и системой золотого стандарта в быстром темпе ( p > 0,05), тогда как различия были в медленном темпе (~ 2,04 °; p ≤ 0,05; d = 0,17). Коэффициенты внутриклассовой корреляции (ICC) для взаимосвязи между системами были очень близки к 1 при обоих темпах (медленный: 0,981; быстрый: 0,998). Анализ надежности повторного тестирования не выявил разницы между наборами измерений.В заключение, WIMU можно рассматривать как действующее и надежное устройство для мониторинга диапазона движений IOC во время полового акта в миссионерской позе и позе наездницы.
Ключевые слова: сексуальная активность, поза, IOC, кинематика, WIMU
1. Введение
Сексуальная активность признана важным, неотъемлемым аспектом человеческой жизни [1]. При правильном и безопасном применении он приносит пользу для здоровья и тесно связан с ожидаемой продолжительностью жизни [2]. Различные исследования показали, что сексуальная активность может иметь пользу для психического здоровья и улучшать когнитивные функции [3].Он может работать как антистрессовая терапия за счет повышения уровня окситоцина [4], который подавляет действие кортизола [5]. Сексуальная активность также снижает риск сердечно-сосудистых заболеваний [1]. Частая сексуальная активность может увеличить сосудорасширяющую способность, улучшить функционирование сосудистой стенки артерий и вен и повысить эффективность снабжения мышц кислородом, тем самым способствуя здоровью сердечно-сосудистой системы [6].
Половой акт можно рассматривать как физическую активность, поскольку он включает в себя движения опорно-двигательного аппарата, что приводит к расходу энергии [7].В компендиуме физической активности Эйнсворт и др. [8] указана сексуальная активность со средней интенсивностью от 1,5 до 1,8 метаболического эквивалента заданий (МЕТ), а недавнее исследование показало, что здоровые взрослые люди совершают половой акт с интенсивностью 5,8 МЕТ. [9]. Однако необходимы дополнительные исследования различных кинематических и физиологических параметров во время полового акта, чтобы лучше понять потребности этой деятельности [10].
Возможно, отчасти причина отсутствия исследований полового акта заключается в том, что это деятельность, предполагающая физическую близость с другим человеком.В некоторых слоях общества решения о половом акте могут иметь коннотацию принятия или неприятия. Методологические трудности, связанные с этим типом исследования, также могут быть фактором. Несмотря на это, разнообразие результатов, полученных об интенсивности и потребностях полового акта в исследованиях [7,8,9], проведенных на сегодняшний день, заставляет пересмотреть физические требования полового акта. Использование менее инвазивных технологий, которые учитывают биоэтические проблемы, связанные с этим типом исследований, может позволить контролировать подлинный (не смоделированный в лаборатории) половой акт.
В нескольких исследованиях пытались контролировать диапазон движений поясничного отдела позвоночника во время полового акта в разных положениях мужчин и женщин [11,12], поскольку некоторые из факторов, связанных с уменьшением частоты полового акта, являются не только физиологическими, но и механическими. [12]. Например, в предыдущем исследовании сообщалось, что вторым и третьим наиболее часто цитируемыми утверждениями о снижении частоты половых сношений у женщин и мужчин, соответственно, были «трудности с движениями таза» [11,13].В связи с этим предыдущие исследования кинематических требований полового акта пришли к выводу, что такие положения, как миссионерская, вызывают сильное сгибание поясничного отдела позвоночника как у мужчин, так и у женщин, и, следовательно, это не рекомендуется пациентам с непереносимостью сгибания [11,12]. Кроме того, другое исследование показало, что поза наездницы требовала диапазона движений при интенсивном сгибании бедра, что приводило к импинджментам при протезировании [14]. В результате такая поза во время полового акта может быть потенциально опасной для пациентов с патологией тазобедренного сустава [14].Следовательно, биомеханический анализ движений и поз во время полового акта считается необходимым, особенно для упомянутых выше положений [11,12,14]. Кроме того, способность системы рассчитывать диапазон движения поясничного отдела позвоночника подразумевает ее способность обнаруживать циклы проникновения внутрь-наружу (IOCs), описываемые как угловое смещение от максимального сгибания до максимального разгибания движения таза [12 ]. В этом типе исследований используются системы захвата движения золотого стандарта (MOCAP), но использование этих систем ограничено лабораторными условиями по техническим причинам: сложность установки, процедуры калибровки или анализа данных [15].
Таким образом, на данный момент кажется, что инерциальные измерительные блоки (IMU) могут быть хорошей альтернативой системам MOCAP. IMU собирают трехмерные данные (x, y и z) с помощью комбинации акселерометров, гироскопов и магнитометров [15]. Кроме того, некоторые IMU могут синхронизироваться с физиологическими данными, полученными с дополнительных датчиков (например, датчиков частоты сердечных сокращений, мышечной активации или мышечного кислорода) [16]. Это позволяет практикующим лучше понять физиологические и кинематические потребности полового акта.Таким образом, использование переносных датчиков имеет важное значение при проведении исследований в контексте сексуальной активности. Эти устройства беспроводные, легкие, маленькие и простые в использовании [15]. Следовательно, участники имеют близость и автономию для выполнения деятельности дома без вмешательства какого-либо исследователя или специалиста. Более того, сочетание нескольких датчиков акселерометров, гироскопов или магнитометров может быть полезным для успешного понимания поведения участников во время полового акта [17]. В настоящее время на рынке доступны различные системы для исследовательских целей и клинических приложений [15], но необходимо внести несколько улучшений в регистрацию данных, обработку данных и присоединение устройств, прежде чем эти системы можно будет использовать более широко [18].
С учетом вышеупомянутых причин, касающихся методологических трудностей, связанных с этим типом исследования, важности измерения диапазона движений во время определенных положений полового акта (например, миссионерской позиции и позиции наездницы), а также преимуществ использования носимых датчиков (т. е. практически полезны для наблюдения за реальными ситуациями, не вызывая вторжения участников), необходима достоверность и надежность инерционных устройств для их использования во время полового акта.Только в одном исследовании изучалось применение акселерометров при половом акте для мониторинга инерционных параметров, которые могут помочь точно классифицировать сексуальные расстройства (например, преждевременная или отсроченная эякуляция) [19]. Однако нам не известны какие-либо исследования, в которых анализировалась бы достоверность и надежность инерционных устройств при использовании для оценки диапазона движений во время полового акта. Следовательно, цели данного исследования: (1) проанализировать одновременную применимость инерционного устройства для мониторинга диапазона движений таза во время имитации полового акта в миссионерской позе и позе наездницы; и (2) проанализировать надежность повторного тестирования инерционного устройства для контроля диапазона движений таза во время имитации полового акта в миссионерской позе и позе наездницы.
2. Материалы и методы
2.1. Участники
В исследовании приняли участие 26 участников (возраст: 23,65 ± 3,01 года; рост: 1,75 ± 0,07 м; вес: 70,75 ± 12,43 кг), 15 мужчин (возраст: 24,2 ± 3,02 года; рост: 1,79). ± 0,06 м; вес: 77,86 ± 10,47 кг) и 11 женщин (возраст: 22,91 ± 2,94 года; рост: 1,69 ± 0,04 м; вес: 61,04 ± 7,3 кг). Размер выборки был рассчитан с использованием программного обеспечения G * Power (Heinrich-Heine-Universität Düsseldorf, Дюссельдорф, Германия) [20], указав статистическую мощность> 0.85, p <0,05 и средний размер эффекта (Cohen's d = 0,5) для достаточной мощности в исследовании [21]. Всем участникам были объяснены цели и методы, и были даны ответы на любые их вопросы о процедурах или других аспектах исследования. Им сказали, что они могут в любой момент остановить тест или выйти из исследования. Затем они предоставили полностью информированное согласие на участие в исследовании. Перед оценкой всех участников устно и письменно проинформировали о целях и процедурах исследования.Процедуры были ранее разработаны в соответствии с Хельсинкской декларацией и одобрены Университетским комитетом по биоэтике.
Критерии включения: мужчина или женщина; взрослые в возрасте от 18 до 55 лет; предыдущий опыт гетеросексуальных контактов в позициях, указанных в разделе «Методы». Основанием для исключения считалась любая диагностированная патология или дисфункция опорно-двигательного аппарата.
2.2. Процедура
Потенциальные участники получили досье с информацией о целях и протоколе исследования, чтобы они знали, что было вовлечено, до посещения лаборатории.Мужчины и женщины тестировались отдельно в отдельных сессиях. Потенциальные участники, которые были доступны и заинтересованы в участии, были назначены на соответствующую тестовую сессию. Протокол был снова объяснен с демонстрацией одного из мужчин-исследователей (для мужского сеанса) и сотрудницы-женщины (для женского сеанса).
Чтобы участники чувствовали себя комфортно при выполнении требуемых движений, между исследователями и участниками были помещены складные экраны, чтобы исследователи не могли видеть движения, совершаемые во время тестов, и, таким образом, давали участникам некоторую конфиденциальность.Сотрудница-женщина присутствовала в лаборатории на протяжении всех женских тестов, хотя исследователи не могли видеть движения участников. Участники выполнили 4 подхода по 20 циклов «вход-выход» (IOC; 2 подхода в медленном темпе и 2 подхода в быстром темпе) после 1 ознакомительного подхода к тесту в каждом темпе. Сидоркевич и МакГилл [12] описывают IOC как диапазон движения (в градусах) между максимальным сгибанием и максимальным разгибанием движения (). Затем был собран диапазон движения для каждого IOC.
Описание диапазона движения из двадцати циклов входа-выхода (IOC), которые были выполнены одним участником, записанных обеими системами (камеры Flex 3 и WIMU Pro) и разделенных фазами входа-выхода. (I: синфазный; O: синфазный).
Участники выполняли подходы один за другим с пятисекундным перерывом, оставаясь в фазе «аута» цикла. Абсолютная частота движений в обоих темпах контролировалась участниками в соответствии с их предыдущим опытом. Таким образом, ознакомительные наборы были использованы, чтобы позволить участникам адаптироваться к процедуре.Данные, собранные во время ознакомительных наборов, были исключены из статистического анализа. Включенные наборы (наборы 1 и 2 для медленных и быстрых темпов) использовались для анализа одновременной валидности, тогда как надежность теста-повторного тестирования анализировалась, следуя тому же протоколу на другом сеансе. Мужчины выполняли тест в «миссионерской» позе (а), а женщины — в позе «скотнице» (б). После завершения теста записанные данные были зашифрованы в базе данных.
( a ) Миссионерская поза.( b ) Поза наездницы.
2.3. Инструменты
Одно устройство WIMU Pro (RealTrack Systems, Альмерия, Испания) использовалось для записи движений таза. Это устройство включает в себя множество инерциальных датчиков, включая четыре трехмерных акселерометра и три трехмерных гироскопа, которые собирают данные с частотой дискретизации 1000 Гц, в дополнение к трехмерному магнитометру и барометру, которые собирают данные с частотой 100 Гц. Это устройство предоставляет данные трехмерной акселерометрии (x, y, z) и трехмерную угловую скорость (x, y, z), и комбинирование этих параметров позволяет датчику ориентации вычислять ориентацию объекта относительно контрольной точки.Поскольку движение твердого тела относительно неподвижной точки описывается углами Эйлера, появляется набор из трех угловых координат, обеспечивающих ориентацию системы отсчета подвижных ортогональных осей относительно неподвижной [22]. Таким образом, угловое смещение могло быть проанализировано с помощью Z-канала Эйлера. Аппарат помещали вертикально в эластичный карман (Aptonia, Лилль, Франция), прикрепленный к крестцовой области.
Система MOCAP из 16 инфракрасных камер (Flex 3, Optitrack, Natural Point, OR, USA) также использовалась (эта система считается золотым стандартом) для первой и второй цели исследования.Эта система регистрировала угловое смещение твердого тела, создаваемое 4 сферическими маркерами (B&L Engineering, Тастин, Калифорния, США), которые были помещены одним и тем же тестером на основание маркера жесткого тела, которое имело 4 маркера с резьбой разных типов. длины (Optitrack, Natural Point, Орегон, США) на верхней части устройства WIMU Pro в области крестца (позвонки S3 считались анатомическим ориентиром для размещения основания маркера твердого тела; a) в пределах зоны тестирования (b) . Эти 4 маркера сформировали твердое тело, из которого было извлечено угловое смещение по оси x с частотой 100 Гц с использованием программного обеспечения Motive (Optitrack, Natural Point, OR, США).Эта система показала хорошую точность и надежность в клинических и исследовательских приложениях [23], а также при тестировании морфологии позвоночника [24].
( a ) Размещение инерционного устройства и сферических маркеров на крестце у мужчин и женщин. ( б ). Вид спереди и сзади на экспериментальную установку, которая включала складные экраны (A), испытательную площадку (B) и 16 оптоэлектронных камер (белые кружки).
В текущем исследовании каждый IOC был рассчитан с помощью «Cycles Monitor», доступного в программном обеспечении SPro (RealTrack Systems, Альмерия, Испания).«Монитор циклов» анализирует сигнал по данным углового смещения. Он основан на алгоритме, который выбирает окна выборок ( N = 400) и вычисляет среднюю точку этого окна, которая является источником сигнала. Как только источник сигнала позволяет идентифицировать как положительную, так и отрицательную фазы, «Cycles Monitor» обнаруживает пики и вычисляет разницу между одним пиком и другим (диапазон движения в градусах). Затем для каждого инструмента был получен диапазон движения между минимальным и максимальным значениями (градусы фаз входа-выхода соответственно) каждого IOC
2.4. Синхронизация данных от обоих инструментов
Синхронизация данных от двух систем стала возможной благодаря уменьшению частоты дискретизации инерциального устройства с 1000 до 100 Гц с помощью программного обеспечения для анализа SPro (RealTrack Systems, Альмерия, Испания). Во-первых, после процедуры понижающей дискретизации использовался фильтр нижних частот, который пропускает только низкочастотные данные. Программное обеспечение использует быстрое преобразование Фурье для анализа сигнала в частотной области и исключения данных на высоких частотах (более 100 Гц).Затем программа берет 100 отсчетов из 1000 отсчетов в секунду и удаляет шум из сигнала. Таким образом, синхронизация данных была облегчена, так как сигналы от обоих инструментов теперь были на 100 Гц. Путем наблюдения были обнаружены максимальные и минимальные пиковые значения каждого IOC для обоих сигналов. Затем был вычислен временной сдвиг в миллисекундах между одним сигналом и другим. Поскольку оба источника данных имеют постоянную частоту, в программном обеспечении SPro есть опция «Применить временное смещение», которая корректирует эту разницу во времени между обоими сигналами.Затем были проанализированы минимальное значение (степени) фазы «выхода» первого IOC каждого теста и максимальное значение (степени) фазы «входа» последнего IOC в тесте, чтобы гарантировать, что синхронизация процедура прошла успешно.
2,5. Статистический анализ
Предварительные тесты нормальности Шапиро-Уилка показали, что все переменные (диапазон движения во время IOC в наборе 1, 2, 3 и 4, собранные камерами WIMU Pro и Flex3) были нормально распределены, поэтому параметрические тесты использовались во всех последующих анализы.
-тест Стьюдента t для парных выборок использовался для выявления систематических различий между системами (валидность) и между наборами, выполненными данным участником (надежность). Величины эффекта для межгрупповых эффектов (Cohen’s d ) рассчитывались с использованием комбинированного стандартного отклонения и оценивались с использованием следующих тривиальных критериев: 0–0,19; маленький: 0,20–0,49; средний: 0,50–0,79; большой: ≥0,8 [25].
Параллельная достоверность устройства WIMU Pro была проанализирована путем вычисления следующих статистических данных: разница между системами (систематическая ошибка), парные отношения между системами (рассчитанные с использованием линейной регрессии наименьших квадратов [26], стандартные ошибки измерения (SEMs). ), коэффициенты внутриклассовой корреляции (ICC) (2,1) с 95% доверительными интервалами [27] и величины эффекта (для количественной оценки величины различий).
ICC с 95% доверительным интервалом также использовались для оценки относительной надежности каждой системы при вычислении среднего углового перемещения при медленном и быстром темпе. Абсолютная надежность, определяемая как степень, в которой повторные измерения различаются у разных людей, была определена с использованием стандартной ошибки измерения (SEM) и коэффициента вариации (выраженного как% CV) [28].
Статистическая мощность и величина эффекта рассчитывались с помощью программного обеспечения G * Power (v.3.1) (Heinrich-Heine-Universität Düsseldorf, Дюссельдорф, Германия) для OSX [20].Статистическая мощность была выше 0,9 по всем анализируемым переменным с размером выборки, выбранной в настоящем исследовании. Статистический анализ проводился с помощью программного обеспечения IBM SPSS Statistics версии 25 (SPSS, Inc., Армонк, Нью-Йорк, США), и уровень значимости был установлен на p ≤ 0,05.
3. Результаты
показывает одновременную действительность устройства WIMU Pro как метода мониторинга диапазона движения в IOC в медленном и быстром темпе по сравнению с системой камер Flex3 золотого стандарта.Между системами при медленном темпе были различия (~ 2,04 °, p <0,001), но размер эффекта был очень мал ( d = 0,17), а разница между системами была меньше стандартной ошибки измерения ( SEM = 2,34 °). При быстром темпе не было значительных различий между системами (~ 0,24 °, p > 0,05), и различия были ниже, чем SEM (2,96 °). При обоих темпах ICC был очень близок к 1, с p <0,001 ().
Таблица 1
Одновременное действие устройства WIMU Pro относительно системы MOCAP при использовании для отслеживания диапазона движения во время быстрых и медленных операций ввода-вывода.
| Slow Pace | Fast Pace | |||
|---|---|---|---|---|
| WIMU Pro (95% CI; °) | 24,91 ± 10,92 * (19,91–29,27) | 31,01 ± 11,96 (24,64–37,83) камеры (95% ДИ; °) | 26,96 ± 12,13 (20,62–29,65) | 31,26 ± 11,72 (24,56–37,01) |
| Систематическое смещение (°) | −2,04 ± 2,45 | −0,25 ± 0,24 | ||
| Коэна д | 0.17 | 0,02 | ||
| SEM (°) | 2,34 | 2,96 | ||
| R 2 корреляция | 0,96 * | 0,98 * | ||
| ICC ( –0,994) * | 0,998 (0,993–0,999) * |
показывает надежность тест-повторных тестов при использовании для контроля диапазона движений во время IOC в медленном и быстром темпе. Систематической разницы между тестом и повторным тестом не было, а абсолютные различия были меньше единицы.5 ° для обеих систем. Полученный SEM составил 2,6 °. % CV был выше при медленном темпе, чем при быстром темпе в обеих системах (среднее значение: 7,72% против 5,28%). ICC был очень высоким в обеих системах (среднее значение: 0,987, p <0,001).
Таблица 2
Тестирование – повторное тестирование надежности системы WIMU Pro и MOCAP при использовании для отслеживания диапазона движения во время быстрых и медленных IOC.
| Переменный | WIMU Pro | Камеры Flex3 | ||||
|---|---|---|---|---|---|---|
| Медленный темп | Быстрый темп | Медленный темп | Быстрый темп | 24%31,24 ± 12,37 (24,64–37,83) | 26,38 ± 12,57 (21,07–31,69) | 31,39 ± 12,13 (24,92–37,85) |
| Set ° 2 (95% ДИ; ) | 25,14 ± 10,69 (20,62–29,65) | 30,78 ± 11,67 (24,56–37,01) | 27,54 ± 11,83 (22,54–32,54) | 31,13 ± 11,42 (25,05–37,22) | ||
| (систематическое смещение) | -0,44 ± 2,73 | 0,45 ± 2,50 | -1,16 ± 2,72 | 0,25 ± 2.35 | ||
| d Коэна | 0,04 | 0,03 | 0,09 | 0,02 | ||
| SEM (°) | 2,24 | 3,00 | 902 902 902 902 902 902 16 3,00 902 902 902 902 902 16 3,00 902 902 902 9027,15 | 5,47 | 8,29 | 5,09 |
| ICC (95% ДИ) | 0,985 (0,965–0,993) * | 0,986 (0,964–0,994) * | * | 0.990 (0,973–0,997) * | ||
и представляют результаты анализа линейной регрессии при медленном и быстром темпе, соответственно. Оба рисунка показывают высокую положительную корреляцию между угловыми значениями, зарегистрированными двумя системами, R 2 > 0,9 ( p <0,001;).
Корреляция между системами для контроля диапазона движения во время медленных IOC.
Корреляция между системами для контроля диапазона движения во время быстрых IOC.
4. Обсуждение
Целью данного исследования является анализ одновременной валидности и надежности повторного тестирования инерционного устройства для мониторинга диапазона движений таза во время имитации полового акта в миссионерской позе и позе наездницы.
Главный вывод заключался в том, что система WIMU Pro давала достоверные измерения по сравнению с системой MOCAP золотого стандарта (16 инфракрасных камер Flex3). Кроме того, WIMU Pro показал высокую надежность при повторном тестировании при использовании для отслеживания диапазона движений IOC у мужчин и женщин.
Можно считать, что устройство WIMU Pro имеет высокую одновременную достоверность, поскольку разница между системами составила всего 2,04 °, что ниже, чем SEM (2,65 °). Кроме того, ICC и R 2 для обоих темпов были больше 0,96 ( p <0,001). Предыдущий анализ одновременной применимости WIMU Pro для анализа диапазона движений во время сгибания и разгибания бедра в тесте с подъемом прямой ноги [29] показал аналогичные результаты (разница = 0,5 °, ICC = 0.99 и R 2 = 0,99), хотя SEM был ниже (0,05).
В других исследованиях, в которых инерционные датчики были проверены путем сравнения их с оптическими системами для регистрации диапазона движения по той же оси движения (сгибание-разгибание), были обнаружены следующие систематические различия в оценке движения бедра: 1,55 ° (во время движения бедра). тест на сгибание) [30], 1,8 ° (во время теста вертикальной осанки) [31] и 2,42 ° (во время теста ровной ходьбы) [32]; при оценке диапазона движений туловища во время теста «сидячее положение»: 0.45 ° [30]; в диапазоне движения поясничного отдела позвоночника при тесте на сгибание вперед стоя: 1,82 ° [33], в диапазоне движения пояснично-тазового отдела во время теста на сгибание вперед стоя: 3,06 ° [21]. Были получены следующие дополнительные статистические данные: R 2 = 0,78 [21] и R 2 = 0,82 [34]; SEM = 2,47 ° [32] и SEM = 3 ° [31,33], а ICC 0,99 [35].
Необходимо было оценить надежность повторного тестирования устройства WIMU Pro для мониторинга ВГК у мужчин и женщин, чтобы подтвердить, что наблюдаемые различия в диапазоне движений не были вызваны систематическими ошибками измерения и не были случайными ошибками, вызванными механическими причинами. вариация [28].Систематическая погрешность составляла менее 0,5 ° для обоих шагов, а максимальная CV составляла 7,15% (CV ≤ 10% считаются приемлемыми для аналитических целей [28]. ICC показали, что WIMU Pro имеет превосходную надежность при использовании для мониторинга IOC. Другие исследователи, проанализировавшие надежность технологии золотого стандарта для анализа диапазона движений бедра [36], обнаружили ICC 0,92, CV 3,6 ° и SEM 1,9 °. Предыдущее исследование надежности WIMU Pro при использовании устройства для измерения диапазона движений при сгибании-разгибании бедра [29] получено значение ICC, равное 0.984, CV 0,01% и SEM 0,31 °.
Основным ограничением этого исследования является то, что, поскольку анализ достоверности и надежности устройства требует контроля над процессом сбора данных, его необходимо проводить в лабораторных условиях. Например, участники моделировали движение индивидуально (не попарно). Более того, оба темпа МОК зависели от опыта участников в половом акте. Достоверность теста-ретеста анализировалась с пятисекундным перерывом. Поскольку это первое исследование, посвященное анализу валидности и надежности инерционного устройства для мониторинга диапазона движений таза во время сексуальной активности у мужчин и женщин, результаты можно сравнить только с предыдущими исследованиями валидности или надежности тестирования аналогичных устройств. разные переменные и одинаковый диапазон движения (одна и та же ось движения) [21,29,31,32,33,34,35,36].Чтобы упростить сравнение систем, необходимы дальнейшие исследования пригодности и надежности других устройств для мониторинга диапазона движений таза во время сексуальной активности. Кроме того, было бы очень интересно провести будущие исследования по валидации программных алгоритмов SPro, которые являются основой любой переменной результата. Поскольку в этом исследовании собирались данные от молодых людей (~ 24 года), предполагается, что в будущих исследованиях будет рассматриваться больший размер выборки, которая может включать широкий диапазон возрастов.
5. Выводы
Это исследование показало, что WIMU Pro является действующим и надежным инерционным устройством для мониторинга диапазона движений МОК во время сексуальной активности в миссионерской позе и позе наездницы. WIMU Pro можно использовать для анализа кинематических параметров конкретных форм сексуальной активности в естественных контекстах. Однако следует соблюдать осторожность при анализе диапазона движений таза в различных положениях полового акта.
Благодарности
Хосе М.Олива-Лозано получила стипендию от Министерства науки, инноваций и университетов Испании (FPU18 / 04434). Изабель Мартин-Фуэнтес получила стипендию от Министерства науки, инноваций и университетов Испании (FPU17 / 03787).
Вклад авторов
Концептуализация, J.M.O.-L., I.M.-F. и J.M.M .; методология, J.M.O.-L. и J.M.M .; проверка, J.M.O.-L., I.M.-F. и J.M.M .; формальный анализ, J.M.O.-L. и J.M.M .; расследование, Дж.M.O.-L., I.M.-F. и J.M.M .; ресурсы, J.M.O.-L., I.M.-F. и J.M.M .; курирование данных, J.M.O.-L. и J.M.M .; письмо — подготовка оригинального черновика, J.M.O.-L .; написание — просмотр и редактирование, визуализация и администрирование проекта, J.M.O.-L., I.M.-F. и J.M.M .; визуализация, J.M.O.-L., I.M.-F. и J.M.M .; надзор, J.M.M. Все авторы прочитали и согласились с опубликованной версией рукописи.
Финансирование
Это исследование не получало внешнего финансирования.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Список литературы
1. Levin R.J. Сексуальная активность, здоровье и благополучие — полезная роль коитуса и мастурбации. Секс. Relatsh. Ther. 2007. 22: 135–148. DOI: 10.1080 / 146819149197. [CrossRef] [Google Scholar] 2. Линдау С.Т., Гаврилова Н. Секс, здоровье и годы сексуально активной жизни, приобретенные благодаря хорошему здоровью: данные двух перекрестных обследований старения населения США. BMJ. 2010; 340: 580–590. DOI: 10.1136 / bmj.c810. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 3.Райт Х., Дженкс Р.А. Секс по мозгам! Связь между сексуальной активностью и когнитивной функцией в старшем возрасте. Возраст Старение. 2016; 45: 313–317. DOI: 10,1093 / старение / afv197. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 5. Легрос Дж. Дж. Ингибирующее действие окситоцина на кортикотропную функцию у людей: являются ли вазопрессин и окситоцин инь-янь нейрогормонами? Психонейроэндокринология. 2001; 26: 649–655. DOI: 10.1016 / S0306-4530 (01) 00018-X. [PubMed] [CrossRef] [Google Scholar] 6. Майерс Дж. Физические упражнения и здоровье сердечно-сосудистой системы.Тираж. 2003; 107: 2–5. DOI: 10.1161 / 01.CIR.0000048890.59383.8D. [PubMed] [CrossRef] [Google Scholar] 7. Касперсен К.Дж., Пауэлл К.Э., Кристенсон Г.М. Физическая активность, упражнения и физическая подготовка: определения и различия для исследований, связанных со здоровьем. Public Health Rep. 1985; 100: 126–131. [Бесплатная статья PMC] [PubMed] [Google Scholar] 8. Эйнсворт Б.Е., Хаскелл В.Л., Леон А.С., Джейкобс Д.Р., Монтойе Х.Дж., Саллис Дж.Ф., Паффенбаргер Р.С. Компендиум физической активности: Классификация энергетических затрат при физической активности человека.Med. Sci. Спортивные упражнения. 1993; 25: 71–80. DOI: 10.1249 / 00005768-199301000-00011. [PubMed] [CrossRef] [Google Scholar] 9. Frappier J., Toupin I., Levy J.J., Aubertin-Leheudre M., Karelis A.D. Расход энергии во время сексуальной активности у молодых здоровых пар. PLoS ONE. 2013; 8: e79342. DOI: 10.1371 / journal.pone.0079342. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 10. Лю Х., Уэйт Л.Дж., Шен С., Ван Д.Х. Полезен ли секс для вашего здоровья? Национальное исследование партнерской сексуальности и риска сердечно-сосудистых заболеваний среди пожилых мужчин и женщин.J. Health Soc. Behav. 2016; 57: 276–296. DOI: 10.1177 / 0022146516661597. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 11. Сидоркевич Н., МакГилл С.М. Документирование движения позвоночника у женщин во время полового акта с комментариями о последствиях для пациента с болью в пояснице. Евро. Spine J. 2014; 24: 513–520. DOI: 10.1007 / s00586-014-3626-у. [PubMed] [CrossRef] [Google Scholar] 13. Maigne J.-Y., Chatellier G. Оценка сексуальной активности у пациентов с болью в спине по сравнению с пациентами с болью в шее. Clin.Ортоп. Relat. Res. 2001; 385: 82–87. DOI: 10.1097 / 00003086-200104000-00014. [PubMed] [CrossRef] [Google Scholar] 14. Charbonnier C., Chagué S., Ponzoni M., Bernardoni M., Hoffmeyer P., Christofilopoulos P. Сексуальная активность после тотального эндопротезирования тазобедренного сустава: исследование захвата движения. J. Артропластика. 2014. 29: 640–647. DOI: 10.1016 / j.arth.2013.07.043. [PubMed] [CrossRef] [Google Scholar] 15. Poitras I., Dupuis F., Bielmann M., Campeau-Lecours A., Mercier C., Bouyer L., Roy J.-S. Достоверность и надежность носимых датчиков для оценки угла сустава: систематический обзор.Датчики. 2019; 19: 1555. DOI: 10,3390 / s155. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 16. Гомес-Кармона C.D., Бастида-Кастильо А., Гарсия-Рубио Дж., Ибаньес С.Дж., Пино-Ортега Дж. Статическая и динамическая надежность акселерометров WIMU PRO TM в зависимости от анатомического расположения. Proc. Inst. Мех. Англ. Часть P J. Sport. Англ. Technol. 2019; 233: 238–248. [Google Scholar] 17. Гайри Дж. Дж., Ван де Вен П., Нельсон Дж. Слияние нескольких датчиков для повышения контекстной осведомленности о повседневных действиях с помощью повсеместных устройств.Датчики. 2014; 14: 5687–5701. DOI: 10,3390 / s140305687. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 18. Фонг Д., Чан Ю.-Й. Использование носимых инерционных датчиков движения в исследованиях биомеханики нижних конечностей человека: систематический обзор. Датчики. 2010. 10: 11556–11565. DOI: 10,3390 / s101211556. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 19. Чиути Г., Нарди М., Валдастри П., Менсиасси А., Базиль Фасоло К., Дарио П. ХУМОВ: малоинвазивная носимая платформа для мониторинга в сексуальной медицине. Урология.2014; 84: 976–981. DOI: 10.1016 / j.urology.2014.06.040. [PubMed] [CrossRef] [Google Scholar] 20. Фаул Ф., Эрдфельдер Э., Ланг А.Г., Бюхнер А. G * Power 3: гибкая программа статистического анализа мощности для социальных, поведенческих и биомедицинских наук. Behav. Res. Методы. 2007; 39: 175–191. DOI: 10,3758 / BF03193146. [PubMed] [CrossRef] [Google Scholar] 21. О’Салливан К., О’Салливан Л., Кэмпбелл А., О’Салливан П., Данкаертс В. К мониторингу пояснично-тазовой осанки в реальных жизненных ситуациях: одновременная достоверность нового монитора осанки и традиционного лабораторного система анализа движения.Мужчина. Ther. 2012; 17: 77–83. DOI: 10.1016 / j.math.2011.09.006. [PubMed] [CrossRef] [Google Scholar] 22. Дай Дж. Вариации формулы Эйлера-Родригеса, кватернионное сопряжение и внутренние связи. Мех. Мах. Теория. 2015; 92: 144–152. DOI: 10.1016 / j.mechmachtheory.2015.03.004. [CrossRef] [Google Scholar] 23. Карс Б., Медоуз Б., Бауэрс Р., Роу П. Доступный клинический анализ походки: оценка точности отслеживания маркера новой недорогой оптической системы трехмерного анализа движения. Физиотерапия. 2013; 99: 347–351.DOI: 10.1016 / j.physio.2013.03.001. [PubMed] [CrossRef] [Google Scholar] 24. Muyor JM, Arrabal-Campos FM, Martínez-Aparicio C., Sánchez-Crespo A., Villa-Pérez M. Проверка надежности и валидности системы захвата движения (MOCAP) для измерения искривлений грудного и поясничного отделов позвоночника и наклона крестца в сагиттальная плоскость. J. Back Musculoskelet. Rehabil. 2017; 30: 1319–1325. DOI: 10.3233 / BMR-169750. [PubMed] [CrossRef] [Google Scholar] 25. Коэн Дж. Статистический анализ мощности для поведенческих наук.2-е изд. Л. Эрлбаум Ассошиэйтс; Хиллсдейл, Нью-Джерси, США: 1988. [Google Scholar] 26. Ладбрук Дж. Статистические методы для сравнения измерителей и методов измерения: критический обзор. Clin. Exp. Pharmacol. Physiol. 2002. 29: 527–536. DOI: 10.1046 / j.1440-1681.2002.03686.x. [PubMed] [CrossRef] [Google Scholar] 27. Shrout P.E., Fleiss J.L. Внутриклассовые корреляции: использование при оценке надежности оценщика. Psychol. Бык. 1979; 86: 420–428. DOI: 10.1037 / 0033-2909.86.2.420. [PubMed] [CrossRef] [Google Scholar] 28.Аткинсон Г., Невилл А. Статистические методы оценки погрешности (надежности) измерения переменных, относящихся к спортивной медицине. Sports Med. 1998. 26: 217–238. DOI: 10.2165 / 00007256-199826040-00002. [PubMed] [CrossRef] [Google Scholar] 29. Муйор Дж. М. Действительность и надежность нового устройства (WIMU ® ) для измерения растяжимости подколенного сухожилия. Int. J. Sports Med. 2017; 38: 691–695. DOI: 10,1055 / с-0043-108998. [PubMed] [CrossRef] [Google Scholar] 30. Гудвин К., Пак Э.Дж., Хуанг К., Сакаки К.Разработка системы трехмерного измерения движения позвоночника в реальном времени для клинической практики. Med. Биол. Англ. Comput. 2006; 44: 1061–1075. DOI: 10.1007 / s11517-006-0132-3. [PubMed] [CrossRef] [Google Scholar] 31. Пичерно П., Череатти А., Каппоццо А. Совместная оценка кинематики с использованием носимых инерциальных и магнитных сенсорных модулей. Поза походки. 2008. 28: 588–595. DOI: 10.1016 / j.gaitpost.2008.04.003. [PubMed] [CrossRef] [Google Scholar] 32. Чжан Ж.-Т., Новак А.С., Брауэр Б., Ли К. Параллельная валидация измерения угловой кинематики суставов нижних конечностей с помощью Xsens MVN.Physiol. Измер. 2013; 34: 63–69. DOI: 10.1088 / 0967-3334 / 34/8 / N63. [PubMed] [CrossRef] [Google Scholar] 33. Чикара А., МакГрегор А.Х., Хаджилукас Л., Белло Ф., Райс А.С. Количественная оценка движения поясничного отдела позвоночника и таза с помощью носимых инерционных датчиков; Материалы Международной конференции IEEE 2010 по сетям датчиков тела; Сингапур. 7–9 июня 2010 г .; С. 9–15. [Google Scholar] 35. Вальгаард С., Фабер Г.С., ван Ламмель Р.С., ван Дин Дж.Х., Кингма И. Достоверность оценки временных событий, подфаз и кинематики туловища движения сидя-ходьба у пожилых людей с использованием одного инерционного датчика.J. Biomech. 2016; 49: 1933–1937. DOI: 10.1016 / j.jbiomech.2016.03.010. [PubMed] [CrossRef] [Google Scholar] 36. Чарльтон П.С., Mentiplay B.F., Пуа Ю.-Х., Кларк Р.А. Надежность и одновременная применимость смартфона, инклинометра пузырьков и системы анализа движения для измерения диапазона движений тазобедренного сустава. J. Sci. Med. Спорт. 2015; 18: 262–267. DOI: 10.1016 / j.jsams.2014.04.008. [PubMed] [CrossRef] [Google Scholar]Inertial Labs Цифровые 3D-датчики ориентации и наклона | OS3D
Inertial Labs начала производство семейства цифровых трехмерных датчиков ориентации и наклона в 2009 году в ответ на потребности приложений, требующих недорогих надежных решений для измерения тангажа и крена, а также, возможно, магнитного направления.Семейство продуктов DTS (формально OS3D) отличается легкостью, сверхнизким энергопотреблением и легко интегрируется с системами разработки и прочными платформами.
Семейство DTS включает комплект для разработки программного обеспечения, обычно используемый в университетских исследованиях, программах исследований и разработок, а также в промышленных (строительных) областях. Кроме того, семейство OS3D не содержит ITAR и экспортируется в доступные страны. Теперь конечные пользователи могут заменить излишне дорогие инклинометры и датчики наклона продуктом, который одновременно является надежным и поддерживается группой поддержки Inertial Labs.
Команда опытных инженеров Inertial Labs предоставляет опыт, чтобы помочь пользователям выбрать и настроить из доступных моделей: Kernel-100 и OS3DM. Обратитесь в нашу службу поддержки за помощью в интеграции вашего устройства или посетите нашу базу знаний, чтобы просмотреть ответы на часто задаваемые вопросы.
Доступны модели DTS и OS3D
Области применения датчиков 3D-ориентации и наклона
Цифровые 3D-датчики ориентации и наклона Inertial Labs обычно используются для следующих приложений:
Датчик наклона строительного оборудования
Большая часть оборудования для строительных площадок спроектирована так, чтобы быть максимально прочной и долговечной.Однако, когда дело доходит до безопасности, похоже, не хватает надлежащих датчиков для мониторинга, когда оборудование, такое как мобильные подъемные рабочие платформы (MEWP) или бульдозеры и экскаваторы, ориентировано или наклонено до опасного уровня, смещая центр тяжести и приводя к опрокидыванию оборудования. или прокатка. Недорогие датчики DTS используются для обнаружения и предупреждения рабочих, когда платформа, такая как MEWP или экскаватор, превышает пороговое значение эксплуатационной безопасности, подвергая оператора риску.
Подробнее
Системы виртуальной реальности и захвата движения
OS3DM — идеальное недорогое решение для систем виртуальной реальности и захвата движения.Расчет курса необходим во многих мужских костюмах, чтобы иметь возможность отслеживать положение и движения тела. Линия датчиков DTS может использоваться как автономное устройство или связывать их вместе, чтобы создать бесшовную платформу для захвата движения на любой платформе, статической или динамической.
Микро беспилотные летательные аппараты (MUAV)
Индустрия гонок на дронах — идеальный конечный пользователь для семейства датчиков DTS. Легкий и прочный OS3DM рассчитывает направление с точностью до 2 градусов в динамических приложениях.Поскольку пользователи дронов полагаются на решения, которые потребляют как можно меньше энергии, но при этом являются надежным решением, OS3DM удовлетворяет спрос. При максимальной потребляемой мощности всего 0,13 Вт энтузиасты дронов теперь могут лучше оптимизировать скорость дрона, время автономной работы и маневренность.
Медицинское образование и биомеханика
В частности, в области биомедицинской инженерии традиционно используемых акселерометров и гироскопов недостаточно для определения моделей движений человека или животных.Было доказано, что использование магнитометров имеет важное значение для решения неизвестных проблем, когда испытуемые реагируют поведением с низким ускорением. Пример этого можно увидеть при моделировании теплового парения у птиц. DTS зарекомендовал себя как надежное, фильтрованное решение, которое можно легко установить в любой ориентации и откалибровать для своей среды. Благодаря небольшому весу инженеры и защитники окружающей среды предпочитают DTS из-за его небольших размеров и ненавязчивых решений для ориентации.
Программное обеспечение, поддерживаемое DTS
Inertial Labs предоставляет драйверы и необходимые инструменты для легкой интеграции.Откалибруйте устройство на предмет магнитных помех с помощью прилагаемого инструмента MDC. Кроме того, воспользуйтесь комплектом разработки программного обеспечения, чтобы создать индивидуальные решения для вашего приложения.
Рабочие характеристики OS3DMШум гироскопа OS3DM, тест вариации Аллана
Комплекты разработчика DTS
п.
Официальное уведомление о товарных знаках: Все названия продуктов, логотипы и бренды являются собственностью их владельцев.Все названия компаний, продуктов и услуг, используемые в этом документе, используются только для идентификации. Использование этих названий, логотипов и торговых марок не означает одобрения. Kongsberg / Seatex, Ship Motion Control SMC, Teledyne TSS, R2Sonic, WAASP, EdgeTech, NORBIT, IMAGENEX, HYPACK, QINSY, Novatel Inertial Explorer являются товарными знаками Kongsberg / Seatex, Ship Motion Control SMC, Teledyne TSS, R2Sonic, WAASP, EdgeTech. NORBIT, IMAGENEX, HYPACK, QINSY, Novatel Inertial Explorer
Компания Inertial Labs, основанная в 2001 году, является лидером в области технологий позиционирования и ориентации для коммерческих, промышленных, аэрокосмических и оборонных приложений.Inertial Labs имеет всемирного дистрибьютора и представительскую сеть, охватывающую более 20 стран на 6 континентах, которые поставляют компактные, высокопроизводительные и доступные по цене миниатюрные датчики ориентации, эталонные блоки движения (MRU), системы ориентации и направления (AHRS) и инерциальные навигационные системы с поддержкой GPS ( INS). С применением дыхания на суше, в воздухе и на море; Inertial Labs охватывает гамбит инерционных технологий и решений. Свяжитесь с нами чтобы узнать больше.
Worthplaying | «Inertial Drift» (ALL) получает дату выпуска
Скорость по потрясающим трассам на розовом японском закате с набором из 16 уникальных автомобилей, водителей и техник, похожего на боевую игру.
Inertial Drift имеет интуитивно понятную схему управления двумя джойстиками, чтобы сделать дрифт легким и доступным для новых игроков, а также обеспечить глубину для более опытных игроков.
Игроки могут независимо управлять рулевым управлением и дрейфом с помощью правого и левого джойстиков, что позволяет точно контролировать положение и ориентацию своего автомобиля. На управляемость автомобилей влияет применение дроссельной заслонки и тормозов, причем каждый автомобиль реагирует по-своему.Это превращает каждую машину в новую головоломку, которую нужно исследовать и освоить.
Используйте эти навыки в различных гоночных режимах, стилях и локальном многопользовательском режиме.
Основные характеристики:
- Сдвиг с двумя ручками : вдвое больше контроля, вдвое больше контроля! Совершенно новый уровень точности позволяет дрейфовать на волосок от ударного барьера, делая каждый поворот напряженным!
- 16 различных стилей вождения : Каждый персонаж и его машина в Inertial Drift обладают уникальным стилем вождения! Выберите свою любимую технику или овладейте всеми ими, чтобы стать лучшим гонщиком!
- Сеттинг ретро-будущего 90-х: 20 треков, залитых огнями розового японского заката и яркими неоновыми городами, создают почву для захватывающих погонь!
- Интенсивные гонки один на один : превращение гонок в дуэли добавляет азарта каждому вбрасыванию, давая вам заряд адреналина каждый раз, когда вы видите фары в заднем зеркале и слышите музыку!
Inertial Drift появится на Nintendo Switch, PS4, Xbox One и ПК в 7 августа , 2020, как в цифровой версии для загрузки, так и в физической розничной версии.
Другие статьи о Inertial Drift
Inertial Drift вылетает из строя? Игра не запускается? Не запускается инерционный дрейф? Советы по решению проблем.
Если Inertial Drift вылетает, Inertial Drift не запускается, Inertial Drift не устанавливается, в Inertial Drift нет управления, в игре нет звука, выскакивают ошибки, в Inertial Drift вылетают — предлагаем вам самые распространенные способы решения данных проблем.
Обязательно обновите драйверы видеокарты и другое программное обеспечение
Прежде чем выразить все свое недовольство командой разработчиков, не забудьте зайти на официальный сайт производителя вашей видеокарты и загрузить последние версии драйверов.Часто существуют специально подготовленные оптимизированные драйверы для конкретной игры. Вы также можете попробовать установить предыдущие версии драйвера, если проблема не решается установкой текущей версии. Важно помнить, что должна быть загружена только финальная версия драйвера видеокарты — старайтесь не использовать бета-версию, так как в них могут быть ужасные ошибки.
Не забывайте также, что для хорошей работы игры вам может потребоваться установить последнюю версию DirectX, которую можно найти и загрузить с официального сайта Microsoft.
Инерционный дрейф не запускается
Многие проблемы с запуском игр возникают из-за неправильной установки. Проверьте, не возникла ли ошибка при установке, попробуйте удалить игру и снова запустить установщик, но перед установкой не забудьте отключить антивирус — он часто может по ошибке удалять файлы в процессе установки. Также важно помнить, что путь к папке с игрой должен содержать только латинские буквы и цифры.
Также необходимо проверить, достаточно ли места на жестком диске для установки. Вы также можете попробовать запустить игру от имени администратора в режиме совместимости с разными версиями Windows.
Inertial Drift тормозит. Низкий FPS. Фризы. Зависает
Ваше первое решение этой проблемы — установка новых драйверов для видеокарты. Это действие может резко повысить FPS в игре. Также проверьте использование ЦП и памяти в диспетчере задач (открывается нажатием CTRL + SHIFT + ESCAPE).Если перед запуском игры вы видите, что какой-то процесс потребляет слишком много ресурсов — выключите программу или просто удалите этот процесс из диспетчера задач.
Далее заходим в настройки графики в игре. Сначала — отключите сглаживание и попробуйте понизить настройку, отвечающую за постобработку. Многие из них потребляют много ресурсов, и их отключение значительно повысит производительность и не сильно повлияет на качество изображения.
Inertial Drift вылетает на рабочий стол
Если Inertial Drift часто вылетает на рабочий стол, попробуйте снизить качество графики.Вполне возможно, что вашему ПК просто не хватает производительности и игра может работать некорректно. Кроме того, стоит проверять наличие обновлений — в большинстве сегодняшних игр есть система автоматической установки исправлений при запуске, если доступно подключение к Интернету. Проверьте, отключена ли эта опция в настройках, и при необходимости включите ее.
Черный экран в инерционном дрейфе
Самая распространенная проблема с черным экраном — это проблема с графическим процессором.Проверьте, соответствует ли ваша видеокарта минимальным требованиям, и установите последние версии драйверов. Иногда черный экран является результатом недостаточной производительности процессора.
Если с вашим оборудованием все в порядке и оно удовлетворяет минимальным требованиям, попробуйте переключиться в другое окно (ALT + TAB), а затем вернуться к экрану игры.
Inertial Drift не устанавливается. Установка
зависаетПрежде всего, убедитесь, что на жестком диске достаточно места для установки.Помните, что для правильной работы установщику требуется заявленный объем пространства плюс 1-2 ГБ дополнительного свободного места на системном диске. В общем, помните это правило — у вас всегда должно быть не менее 2 гигабайт свободного места на системном диске (обычно это диск C) для временных файлов. В противном случае игры и другое программное обеспечение могут работать некорректно или даже отказываться запускаться.
Проблемы с установкой также могут быть связаны с отсутствием подключения к Интернету или его нестабильностью.Также не забывайте останавливать антивирус на время установки игры — иногда он мешает правильному копированию файлов или по ошибке удаляет файлы, ошибочно полагая, что это вирусы.
Сохранения не работают в инерционном дрейфе
По аналогии с предыдущим решением проверьте наличие свободного места на HDD — как на том, где установлена игра, так и на системном диске. Часто ваши сохранения хранятся в папке с документами, которая находится отдельно от самой игры.
Элементы управления не работают в инерционном дрейфе
Иногда элементы управления в игре не работают из-за одновременного подключения нескольких устройств ввода.Попробуйте отключить геймпад или, если по какой-то причине у вас подключены две клавиатуры или мыши, оставьте только одну пару устройств. Если ваш геймпад не работает, помните — игры обычно официально поддерживают только собственные контроллеры Xbox. Если ваш контроллер определен в системе по-другому — попробуйте использовать программное обеспечение, имитирующее геймпад Xbox (например, x360ce — пошаговое руководство можно найти здесь).
Нет звука в инерционном дрейфе
Проверьте, работает ли звук в других программах.Затем проверьте, не отключен ли звук в настройках игры, и правильно ли выбрано устройство воспроизведения звука, к которому подключены ваши динамики или гарнитура. После этого проверьте громкость в системном микшере, там его тоже можно выключить.
Если вы используете внешнюю звуковую карту — проверьте наличие новых драйверов на сайте производителя.
Изменение настроек мыши и трекпада для обеспечения доступности на Mac
На Mac используйте панель «Мышь и трекпад» в настройках управления указателем расширенного доступа, чтобы упростить использование мыши и трекпада.Доступные параметры зависят от используемого Mac.
Чтобы изменить эти настройки, выберите меню «Apple»> «Системные настройки», нажмите «Универсальный доступ», нажмите «Управление указателем», затем нажмите «Мышь и трекпад».
Откройте для меня панель «Мышь и трекпад»
Опция | Описание |
|---|---|
Скорость двойного щелчка | Отрегулируйте время реакции мыши или трекпада пункт. |
Задержка пружинной загрузки | Используйте ползунок, чтобы указать, как долго элемент должен находиться над папкой, прежде чем папка откроется. |
Игнорировать встроенный трекпад при наличии мыши или беспроводного трекпада | Отключите встроенный трекпад на Mac при использовании мыши или беспроводного трекпада. Если вы используете мышь стороннего производителя, программный драйвер, поставляемый с вашей мышью, может помешать этой опции работать должным образом.Для получения информации см. Документацию к вашей мыши. |
Параметры трекпада | Щелкните, чтобы настроить параметры трекпада: Скорость прокрутки: Отрегулируйте скорость, с которой вы прокручиваете документы и окна с помощью трекпада. Прокрутка: Установите флажок, чтобы включить или выключить прокрутку. Щелкните всплывающее меню, затем выберите параметр, чтобы управлять тем, что происходит, когда вы убираете палец с трекпада: Разрешить перетаскивание: Установите флажок, чтобы можно было перетаскивать элементы.Щелкните всплывающее меню, чтобы выбрать параметр.
|
Параметры мыши | Щелкните, чтобы настроить параметры мыши: Скорость прокрутки: Отрегулируйте скорость, с которой вы прокручиваете документы и окна с помощью мыши. Прокрутка: Установите флажок, чтобы включить или выключить прокрутку (для мыши, такой как Magic Mouse).Щелкните всплывающее меню, затем выберите параметр, чтобы управлять тем, что происходит, когда вы убираете палец с мыши: |