Типы электродвигателей — Однофазные электродвигатели , электродвигатели постоянного тока, асинхронные двигатели
Заказать оборудование
Команда Electrodvigatel.com приглашает к сотрудничеству производителей двигателей
Электродвигатель – это электрическая машина, служащая для преобразования электрической энергии в механическую энергию. Электродвигатель работает на основе принципа электромагнитной индукции.
Существует множество видов электродвигателей, различающихся по конструкции, принципу действия, исполнению и другим характеристикам. Различают основные виды электродвигателей:
По типу протекающего тока двигатели различают:
- Электродвигатели постоянного тока. Широко используют в качестве промышленного оборудования, привода электротранспорта и микропривода исполнительных механизмов.
- Электродвигатели переменного тока. Нашли широкое применение для приводов всех типов технологического оборудования, автоматических регуляторов, электроинструментов.


По конструкции электрические машины различают с вертикально и горизонтально расположенным валом. Электродвигатели также классифицируют по мощности, климатическому исполнению, степени защиты, назначению и другим характеристикам.
Со всеми типами электродвигателей вы можете познакомиться на информационном портале по электродвигателям electrodvigatel.com. Здесь вы найдете преимущества и недостатки, того или иного электродвигателя, полный список производителей электродвигателей, а также сможете узнать стоимость на электродвигатели.
Виды электродвигателей
Однофазные электродвигатели
Трехфазные электродвигатели
Крановые электродвигатели
Лифтовые электродвигатели
Электродвигатели для частотного регулирования
Общепромышленные электродвигатели
Синхронные электродвигатели
Взрывозащищенные электродвигатели
Электродвигатели постоянного тока
Стоимость электродвигателя в основном зависит от следующих параметров:
- Габарит (высота оси вращения)
- Мощность
- Климатическое исполнение
Стоит отметить, что с увеличением габарита электродвигателя усложняется технология изготовления электрических машин, уменьшается серийность выпуска и, соответственно, меняется экономика и ценообразование двигателей.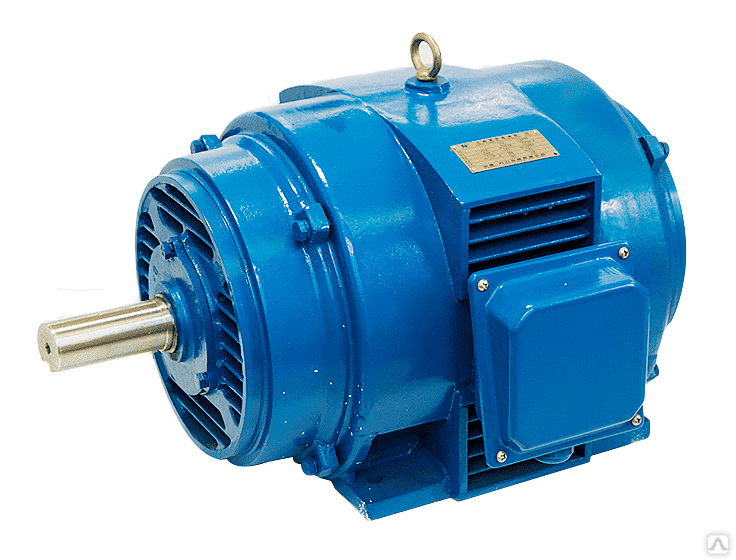 Чем больше габарит двигателя – тем меньше производителей на рынке.
Чем больше габарит двигателя – тем меньше производителей на рынке.
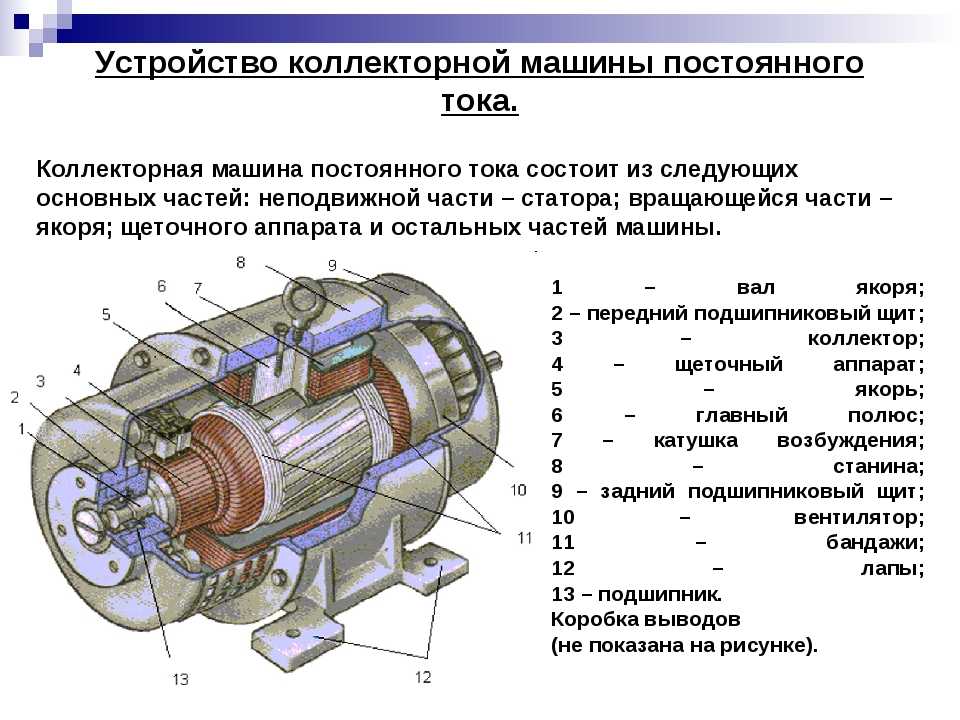
Конструкция электродвигателя
Вращающийся электродвигатель состоит из двух главных деталей:
- статора — неподвижная часть
- ротора — вращающаяся часть
У большинства двигателей внутри статора располагается ротор. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Электродвигатель в разрезе — 1 статор, 2 ротор, 3 подшипник
Условное обозначение электродвигателей
1 – тип электродвигателя:
общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
2 — электрические модификации:
|
Электрические модификации |
Определение |
|
М |
модернизированный электродвигатель: 5АМ |
|
Н |
электродвигатель защищенного исполнения с самовентиляцией: 5АН |
|
Ф |
электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ |
|
К |
электродвигатель с фазным ротором: 5АНК |
|
С |
электродвигатель с повышенным скольжением: АС, 4АС и др. |
|
Е |
однофазный электродвигатель 220V: АДМЕ, 5АЕУ |
|
В |
встраиваемый электродвигатель: АИРВ 100S2 |
|
П |
электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. |

3 — габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
4 — длина сердечника и/или длина станины:
|
Длина сердечника |
Определение |
|
А, В, С |
длина сердечника (первая длина, вторая длина, третья длина) |
|
XK, X, YK, Y |
длина сердечника статора высоковольтных двигателей |
|
S, L, М |
установочные размеры по длине станины |
5 — количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
6 — конструктивные модификации электродвигателя:
|
Модификации электродвигателя |
Определение |
|
Л |
электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4 |
|
Е |
электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3 |
|
Е2 |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Б |
со встроенным датчиком температурной защиты: АИР 180М4 БУ3 |
|
Ж |
электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2 |
|
П |
электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3 |
|
Р3 |
электродвигатель для мотор-редукторов: АИР 100L6 Р3 |
|
С |
электродвигатель для станков-качалок: АИР 180М8 СНБУ1 |
|
Н |
электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4 |
7 — климатическое исполнение электродвигателя:
|
Категория размещения |
Определение |
| У |
умеренного климатического исполнения |
|
Т |
тропического исполнения |
|
УХЛ |
умеренно холодного климата |
|
ХЛ |
холодного климата |
|
ОМ |
для судов морского и речного флота |
8 — категория размещения:
|
Категория размещения |
Определение |
|
1 |
на открытом воздухе |
2 |
на улице под навесом |
|
3 |
в помещении |
|
4 |
в помещении с искусственно регулируемыми климатическими условиями |
|
5 |
в помещении с повышенной влажностью |
9 — степень защиты электродвигателя:
первая цифра: защита от твердых объектов
вторая цифра: защита от жидкостей
|
Степень защиты IP |
Определение первой цифры — защита от твердых объектов |
Определение второй цифры — защита от жидкостей |
|
0 |
без защиты |
без защиты |
|
1 |
защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
защита от вертикально падающей воды (конденсация) |
|
2 |
защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
защита от воды, пдпющей под углом 15º к вертикали |
|
3 |
защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
защита от воды, падающей под углом 60º к вертикали |
|
|
защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
защита от водяных брызг со всех сторон |
|
5 |
защита от пыли (без осаждения опасных материалов) |
защита от водяных струй со всех сторон |
10 – мощность электродвигателя
11 – обороты электродвигателя
12 — Монтажное исполнение электродвигателя
Двигатели переменного тока
Двигатели переменного тока подразделяются на две группы: асинхронные и синхронные. Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
Синхронные двигатели в свою очередь делятся на основные исполнения групп двигателей:
- общепромышленное
- специальное (крановые, для дробилок, лифтовые и другие)
- взрывозащищенное. Дальнейшее подразделение — для химической отрасли и рудничные, рудничные специальные.
Асинхронными двигателями (АД) называют машины переменного тока, в которых основное магнитное поле создается переменным током и частота вращения ротора, не связанная жестко с частотой тока в обмотке статора, меняется с нагрузкой. Наибольшее применение получили бесколлекторные асинхронные машины, используемые главным образом в качестве электродвигателей. Значительно реже применяются коллекторные асинхронные электродвигатели — более дорогие и менее надежные в эксплуатации, чем бесколлекторные.
По количеству фаз двигатели переменного тока подразделяются:
Асинхронные двигатели наиболее распространены в настоящее время, чем другие виды электродвигателей.
Синхронные и асинхронные машины переменного тока обладают свойством обратимости — они могут работать как в режиме генератора, так и в режиме двигателя.
Электрический двигатель | это… Что такое Электрический двигатель?
Основная статья: Электрическая машина
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Содержание
|
Принцип действия
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. Сейчас эти двигатели редкость, так как на рынке появились преобразователи частоты, ранее же они очень часто использовались в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трехфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует эдс), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов. Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трехфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надежнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно с вращающимся полем статора. Там, где нет трехфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.
Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f: nc=f/p
При частоте 50 Гц получаем для р = 1, 2, 3 (двух-, четырех- и шести полюсных машин) синхронные частоты вращения поля nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с беличьей клеткой) или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Источник
Устройство асинхронного двигателя http://techno.x51.ru/index.php?mod=text&uitxt=905
Классификация электродвигателей
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.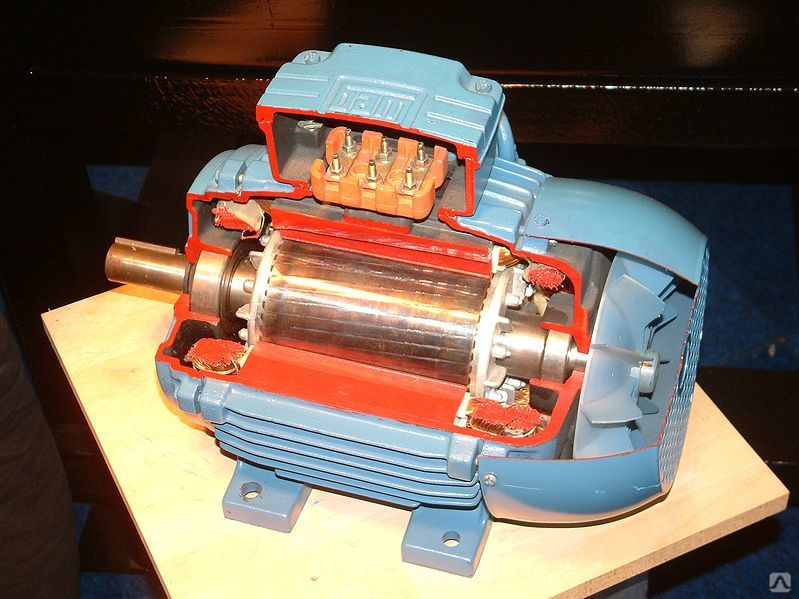 [1]
[1]
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
- Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.[2]
Двигатели переменного тока
Трехфазные асинхронные двигатели
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).[2]
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
- однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь;
- двухфазные — в том числе конденсаторные;
- трёхфазные;
- многофазные;
Универсальный коллекторный электродвигатель
Основная статья: Коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт.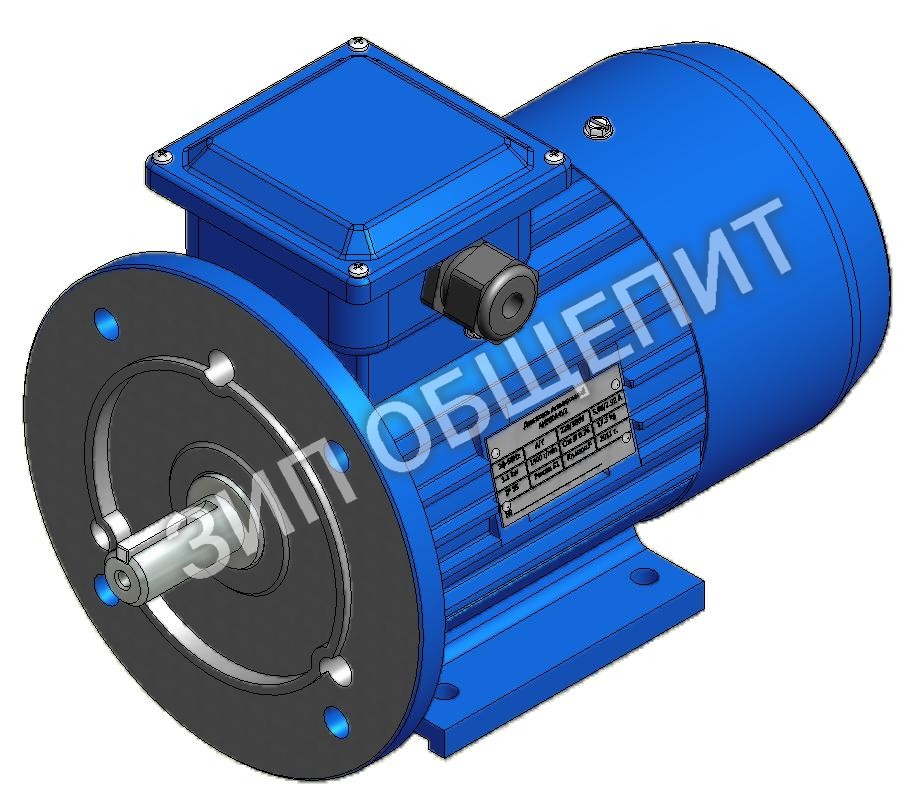 Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины.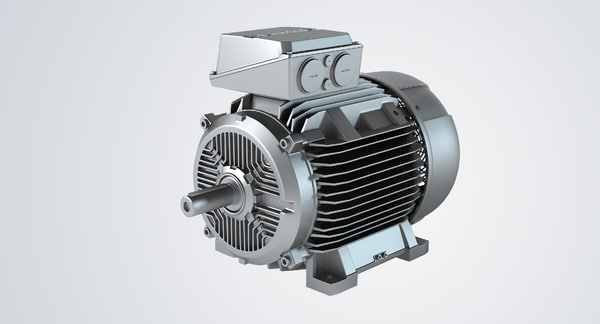 Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Примечания
- ↑ Белов и др., 2007, с. 27
- ↑ 1 2 Белов и др., 2007, с. 28
Литература
- Белов М. П., Новиков В. А., Рассудов Л. Н. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. — 3-е изд., испр. — М.: Издательский центр «Академия», 2007. — 575 с. — (Высшие профессиональное образование). — 1000 экз. — ISBN 978-5-7695-4497-2
Ссылки
- Защита асинхронных двигателей
- Схема подключения электродвигателя
- Потери энергии и КПД асинхронных двигателей
- Рабочие характеристики асинхронного двигателя
- Пуск электродвигателя с фазным ротором
- Строение асинхронного электродвигателя — видео, 3D
- Конструкции электрических машин
- Подключение электродвигателя
Типы электродвигателей — Thomson Lamination Company, Inc.

Электродвигатели можно найти во многих различных областях, от обычных предметов домашнего обихода до различных видов транспорта и даже передовых аэрокосмических приложений. Здесь мы делимся руководством, чтобы дать вам лучшее представление о доступных вариантах.
Электродвигатели и генераторы
Электродвигатели и генераторы представляют собой электромагнитные устройства с якорной обмоткой или ротором, который вращается внутри обмотки возбуждения или статора; однако они имеют противоположные функции. Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую.
Два типа электродвигателей
Обмотка возбуждения в электродвигателях обеспечивает электрический ток для создания постоянного магнитного поля, которое якорная обмотка использует для создания крутящего момента на валу двигателя. Различия между различными типами электродвигателей связаны с их уникальными характеристиками, напряжением и требованиями к применению. Существует не менее дюжины различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC). То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом, создавая механическую силу, создает дополнительные различия в каждой из этих классификаций.
Различия между различными типами электродвигателей связаны с их уникальными характеристиками, напряжением и требованиями к применению. Существует не менее дюжины различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC). То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом, создавая механическую силу, создает дополнительные различия в каждой из этих классификаций.
Двигатели постоянного тока
Коллекторные двигателиКоллекторные двигатели состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Щетки
- Коллектор
Существует четыре основных типа щеточных двигателей, в том числе:
- Двигатели серии. Статор включен последовательно или идентичен ротору, поэтому их токи возбуждения идентичны. Характеристики: используется в кранах и лебедках, большой крутящий момент на низких скоростях, ограниченный крутящий момент на высоких скоростях.
- Шунтирующие двигатели. Катушка возбуждения параллельна (шунтирует) ротору, поэтому ток двигателя равен сумме двух токов. Характеристики: используется в промышленности и автомобилестроении, отличный контроль скорости, высокий/постоянный крутящий момент на низких скоростях.
- Накопительные составные двигатели. Этот тип сочетает в себе аспекты как последовательного, так и закрытого типов, что делает ток двигателя равным сумме токов последовательного и шунтирующего возбуждения. Характеристики: используется в промышленности и автомобилестроении, сочетает в себе преимущества серийных и параллельных двигателей.
- Двигатели постоянного тока с постоянными магнитами. Наиболее распространенный тип щеточных электродвигателей, двигатели постоянного тока с постоянными магнитами используют постоянные магниты для создания поля статора. Характеристики: используется в коммерческом производстве игрушек и бытовой техники, дешевле в производстве, хороший крутящий момент на низких оборотах, ограниченный крутящий момент на высоких оборотах.


Бесщеточные двигатели не имеют коллектора и щеток. Вместо этого ротор представляет собой постоянный магнит, а катушки находятся на статоре. Вместо управления магнитными полями на роторе бесщеточные двигатели управляют магнитными полями от статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и создавать крутящий момент в более компактной сборке.
Двигатели переменного тока
Двигатели, входящие в классификацию двигателей переменного тока, бывают синхронными или асинхронными, в первую очередь отличающимися скоростью вращения ротора относительно скорости статора. Скорость ротора относительно статора равна в синхронном двигателе, но скорость ротора меньше его синхронной скорости в асинхронном двигателе. Кроме того, синхронные двигатели имеют нулевое скольжение и требуют дополнительного источника питания, а асинхронные или асинхронные двигатели имеют скольжение и не требуют вторичного источника питания.
Синхронный двигатель представляет собой машину с двойным возбуждением, то есть он имеет два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора для создания трехфазного вращающегося магнитного потока. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора блокируется полем статора, двигатель становится синхронным.
Асинхронный (индукционный)В отличие от синхронных двигателей, асинхронные двигатели позволяют запускать асинхронные путем подачи питания на статор без подачи питания на ротор. Асинхронные двигатели имеют конструкцию с обмоткой или с короткозамкнутым ротором. Некоторые примеры асинхронных асинхронных двигателей включают:
- Асинхронные рабочие двигатели с конденсаторным пуском. Это однофазный двигатель с короткозамкнутым ротором и двумя обмотками статора, запускаемый конденсатором. Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частыми пусками и остановками.
- Асинхронные двигатели с короткозамкнутым ротором. Трехфазное питание создает магнитное поле в обмотке статора в этом двигателе, который включает в себя короткозамкнутый ротор из высокопроводящих стальных пластин. Это недорогие, малообслуживаемые и высокоэффективные двигатели, используемые в центробежных насосах, промышленных приводах, больших воздуходувках и вентиляторах, станках, токарных станках и другом токарном оборудовании.
- Двигатели с короткозамкнутым ротором. Эти двигатели устраняют проблемы с низким пусковым моментом в двигателях с короткозамкнутым ротором. Их конструкция уравновешивает отношение реактивного сопротивления к сопротивлению между внешней и внутренней клеткой, увеличивая пусковой крутящий момент при сохранении общей эффективности.
 Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частыми пусками и остановками.
Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частыми пусками и остановками.Нажмите, чтобы развернуть
Идентификация электродвигателя
Выбор двигателя, наиболее подходящего для конкретного применения, зависит от соответствия четырем характеристикам:
- Мощность и скорость
- Рама двигателя
- Требования к напряжению
- Корпуса и монтажные позиции
Металлическая табличка, прикрепленная к двигателю, содержит важную информацию, относящуюся к этим характеристикам, за исключением информации о корпусе.
Мощность и скорость электродвигателя
Номинальная мощность и скорость вращения (об/мин) должны соответствовать требованиям нагрузки для установленного приложения. Двигатели бывают разных категорий мощности, в том числе: дробные двигатели (от 1/20 л.с. до 1 л.с.), интегральные двигатели (от 1 л.с. до 400 л.с.) и большие двигатели (от 100 л.с. до 50 000 л.с.). Номинальные значения оборотов включают 3600 об/мин (2 полюса), 1800 об/мин (4 полюса) и 1200 об/мин (6 полюсов).
Корпус электродвигателя
Размер корпуса двигателя не указывает на его рабочие характеристики, особенно на номинальную мощность в лошадиных силах. Национальная ассоциация производителей электрооборудования (NEMA) разработала номера корпусов, соответствующие монтажным размерам, а их цифры относятся к их размеру «D» или расстоянию от центра вала до центральной нижней части крепления. Как правило, двузначные метки предназначены для дробных двигателей, но в них могут быть встроены двигатели большей мощности.
Требования к напряжению
Напряжение, частота и фаза являются частью требований к напряжению. В большинстве случаев в Северной Америке и Европе трехфазные двигатели имеют двойные индикаторы напряжения, такие как 230/460. Стандартная рабочая частота для большинства электродвигателей составляет 60 Гц, хотя в Европе распространены двигатели с частотой 50 Гц. Это изменение в герцах указывает на то, что двигатель будет работать со скоростью 5/6 своей нормальной скорости вращения. Фаза — это последний бит информации, включенный в требования к напряжению двигателя, указывающий тип требуемого питания, например, трехфазный, однофазный и постоянный ток.
Корпуса и монтажные позиции
Информация о корпусе зависит от условий установки двигателя. Существует две основные категории корпусов — открытые двигатели и закрытые двигатели.
Открытые двигатели Открытые двигатели применяются в относительно чистых и сухих помещениях, что важно, поскольку открытые корпуса двигателей обеспечивают циркуляцию воздуха через обмотки.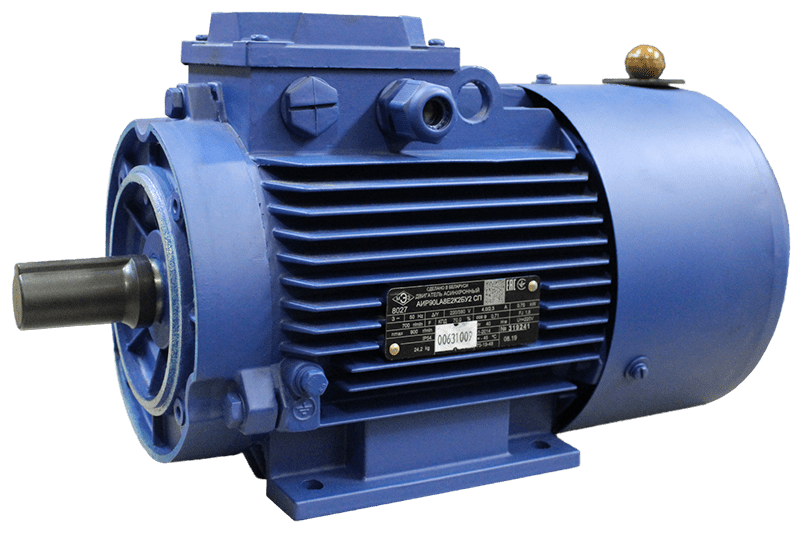
Эти типы не допускают свободного воздухообмена между внешней и внутренней частями двигателя. Различия в герметичности корпуса и функциях охлаждения также различают типы двигателей в закрытом корпусе, в том числе:
- Полностью закрытый вентилятор с охлаждением (TEFC)
- Полностью закрытый невентилируемый (TENV)
- Полностью закрытый воздуховод (TEAO)
- Полностью закрытая мойка (TEWD)
- Взрывозащищенные корпуса (EXPL)
- Опасная зона (HAZ)
Найдите электродвигатель, который лучше всего подходит для вашего применения
Thomson Lamination Company является ведущим производителем штампованных пластинчатых компонентов двигателя, способных производить большие партии пластинчатых пластин ротора и статора из металлов с высокой проводимостью.
Ознакомьтесь с нашими производственными возможностями для ламинирования или свяжитесь с нами, чтобы узнать больше о наших решениях для ламинирования с помощью электродвигателей.
Электродвигатель | Encyclopedia.com
Двигатель постоянного тока
Типы двигателей постоянного тока
Электродвигатели переменного тока
Принципы работы трехфазного двигателя
Ресурсы
Электродвигатель — это машина, используемая для преобразования электрической энергии в механическую. Электродвигатели важны для современной жизни, они используются в пылесосах, посудомоечных машинах, компьютерных принтерах, факсимильных аппаратах, водяных насосах, производстве, автомобилях (как обычных, так и гибридных), станках, печатных станках, системах метро и многом другом.
Основные физические принципы работы электродвигателя известны как закон Ампера и закон Фарадея. Первый утверждает, что электрический проводник, находящийся в магнитном поле, будет испытывать силу, если любой ток, протекающий через проводник, имеет составляющую, перпендикулярную этому полю. Изменение направления тока или магнитного поля создаст силу, действующую в противоположном направлении.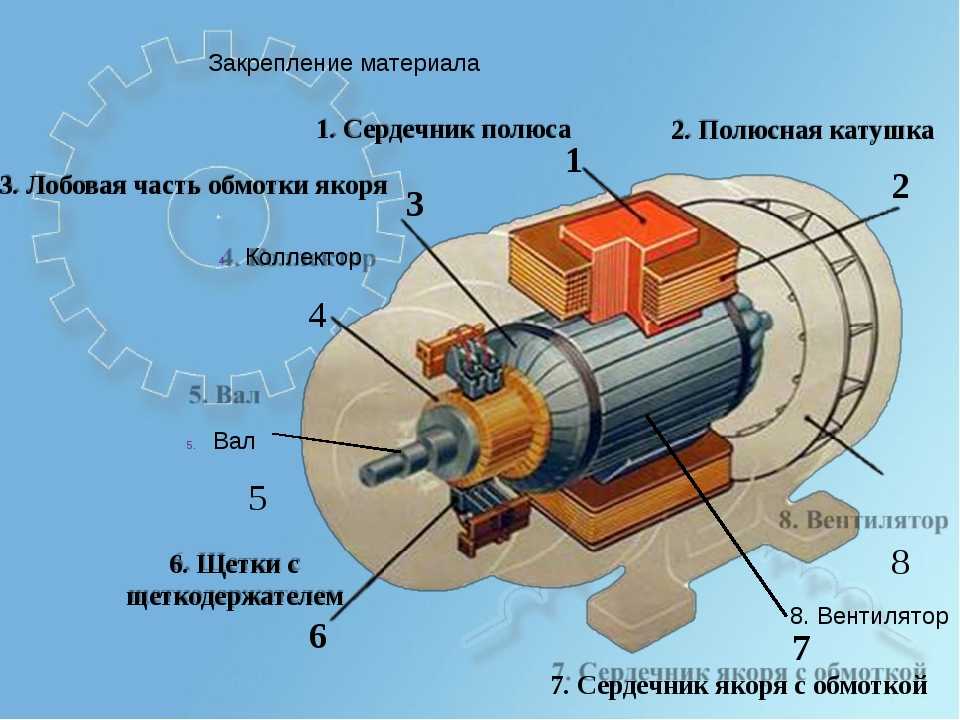 Второй принцип гласит, что если проводник движется через магнитное поле, то любая составляющая движения, перпендикулярная этому полю, создаст разность потенциалов между концами проводника.
Второй принцип гласит, что если проводник движется через магнитное поле, то любая составляющая движения, перпендикулярная этому полю, создаст разность потенциалов между концами проводника.
Электродвигатель состоит из двух основных элементов. Первый, статический компонент, который состоит из магнитных материалов и электрических проводников для создания магнитных полей желаемой формы, известен как статор . Второй, который также состоит из магнитных и электрических проводников для создания определенных магнитных полей, которые взаимодействуют с полями, создаваемыми статором, известен как ротор . Ротор содержит подвижный компонент двигателя, имеющий вращающийся вал для соединения с приводимой машиной и некоторые средства поддержания электрического контакта между ротором и корпусом двигателя (обычно угольные щетки, прижатые к токосъемным кольцам). При работе электрический ток, подаваемый на двигатель, используется для создания магнитных полей как в роторе, так и в статоре. Эти поля толкают друг друга, в результате чего ротор испытывает крутящий момент и, следовательно, вращается.
Эти поля толкают друг друга, в результате чего ротор испытывает крутящий момент и, следовательно, вращается.
Электрические двигатели делятся на две большие категории, в зависимости от типа подаваемой электроэнергии: двигатели постоянного тока (DC) и двигатели переменного тока (AC).
Первый электрический двигатель постоянного тока был продемонстрирован Майклом Фарадеем в Англии в 1821 году. Поскольку единственными доступными источниками электроэнергии был постоянный ток, первые коммерчески доступные двигатели были типа постоянного тока, которые стали популярными в 1880-х годах. Эти двигатели использовались как для маломощных, так и для высокомощных приложений, таких как электрические уличные железные дороги. Только в 189 г.0s, с наличием электроэнергии переменного тока, двигатель переменного тока был разработан, в первую очередь, корпорациями Westinghouse и General Electric. В течение этого десятилетия было решено большинство проблем, связанных с однофазными и многофазными двигателями переменного тока. Следовательно, все основные характеристики электродвигателей были разработаны к 1900 году.
Следовательно, все основные характеристики электродвигателей были разработаны к 1900 году.
Работа двигателя постоянного тока зависит от взаимодействия полюсов статора с частью ротора или якоря. Статор содержит четное число полюсов с переменной магнитной полярностью, каждый полюс состоит из электромагнита, образованного полюсной обмоткой, намотанной на полюсный сердечник. При протекании постоянного тока через обмотку образуется магнитное поле. Якорь также содержит обмотку, в которой ток течет в указанном направлении. Этот ток якоря взаимодействует с магнитным полем в соответствии с законом Ампера, создавая крутящий момент, который вращает якорь.
Если бы обмотки якоря вращались вокруг следующего полюсного наконечника противоположной полярности, крутящий момент действовал бы в противоположном направлении, тем самым останавливая якорь. Чтобы предотвратить это, ротор содержит коммутатор, который изменяет направление тока якоря для каждого полюсного наконечника, мимо которого вращается якорь, таким образом гарантируя, что все обмотки, проходящие, например, через полюс северной полярности, будут иметь ток. в том же направлении, в то время как обмотки, проходящие через южные полюса, будут иметь противоположный ток, создавая крутящий момент в том же направлении, что и крутящий момент, создаваемый северными полюсами. Коллектор обычно состоит из разъемного контактного кольца, по которому перемещаются щетки, подающие постоянный ток.
в том же направлении, в то время как обмотки, проходящие через южные полюса, будут иметь противоположный ток, создавая крутящий момент в том же направлении, что и крутящий момент, создаваемый северными полюсами. Коллектор обычно состоит из разъемного контактного кольца, по которому перемещаются щетки, подающие постоянный ток.
Вращение обмоток якоря через поле статора создает напряжение на якоре, известное как противоЭДС (электродвижущая сила), поскольку оно противодействует приложенному напряжению: это следствие закона Фарадея. Величина встречной ЭДС зависит от напряженности магнитного поля и скорости вращения якоря. При первоначальном включении двигателя постоянного тока противоЭДС отсутствует и якорь начинает вращаться. Счетчик ЭДС увеличивается с вращением. Действующее напряжение на обмотках якоря равно приложенному напряжению за вычетом противоЭДС.
Электродвигатели постоянного тока встречаются чаще, чем мы думаем. Автомобиль может иметь до 20 двигателей постоянного тока для привода вентиляторов, сидений и окон. Они бывают трех разных типов, классифицируемых в соответствии с используемой электрической схемой. В шунтовом двигателе обмотки якоря и обмотки возбуждения соединены параллельно, поэтому токи в каждой из них относительно независимы. Ток через обмотку возбуждения можно регулировать с помощью реостата возбуждения (переменного резистора), что позволяет широко варьировать скорость двигателя в широком диапазоне условий нагрузки. Этот тип двигателя используется для привода станков или вентиляторов, которые требуют широкого диапазона скоростей.
Они бывают трех разных типов, классифицируемых в соответствии с используемой электрической схемой. В шунтовом двигателе обмотки якоря и обмотки возбуждения соединены параллельно, поэтому токи в каждой из них относительно независимы. Ток через обмотку возбуждения можно регулировать с помощью реостата возбуждения (переменного резистора), что позволяет широко варьировать скорость двигателя в широком диапазоне условий нагрузки. Этот тип двигателя используется для привода станков или вентиляторов, которые требуют широкого диапазона скоростей.
В последовательном двигателе обмотка возбуждения соединена последовательно с обмоткой якоря, что приводит к очень высокому пусковому моменту, поскольку и ток якоря, и напряженность поля достигают своего максимума. Однако, как только якорь начинает вращаться, противоЭДС уменьшает ток в цепи, тем самым уменьшая напряженность поля. Серийный двигатель используется там, где требуется большой пусковой момент, например, в автомобильных стартерах, кранах и подъемниках.
Составной двигатель представляет собой комбинацию последовательного и параллельного двигателей, имеющих параллельные и последовательные обмотки возбуждения. Этот тип двигателя имеет высокий пусковой момент и возможность изменять скорость и используется в ситуациях, требующих обоих этих свойств, таких как штамповочные прессы, конвейеры и элеваторы.
Двигатели переменного тока гораздо более распространены, чем двигатели постоянного тока, потому что почти все системы электроснабжения работают на переменном токе. Существует три основных типа двигателей, а именно многофазные асинхронные, многофазные синхронные и однофазные двигатели. Поскольку трехфазные источники питания являются наиболее распространенными многофазными источниками, большинство многофазных двигателей работают от трехфазного тока. Трехфазные источники питания широко используются в коммерческих и промышленных условиях, тогда как однофазные источники почти всегда используются в домашних условиях.
Основное различие между двигателями переменного и постоянного тока заключается в том, что магнитное поле, создаваемое статором, вращается в корпусе переменного тока. Через клеммы вводятся три электрические фазы, каждая фаза питает отдельный полюс поля. Когда каждая фаза достигает своего максимального тока, магнитное поле на этом полюсе достигает максимального значения. По мере уменьшения тока уменьшается и магнитное поле. Поскольку каждая фаза достигает своего максимума в разное время в течение цикла тока, тот полюс поля, магнитное поле которого наибольшее, постоянно меняется между тремя полюсами, в результате чего магнитное поле, наблюдаемое ротором, вращается. Скорость вращения магнитного поля, известная как синхронная скорость, зависит от частоты источника питания и числа полюсов, создаваемых обмоткой статора. Для стандартного источника питания 60 Гц, используемого в США, максимальная синхронная скорость составляет 3600 об/мин.
Через клеммы вводятся три электрические фазы, каждая фаза питает отдельный полюс поля. Когда каждая фаза достигает своего максимального тока, магнитное поле на этом полюсе достигает максимального значения. По мере уменьшения тока уменьшается и магнитное поле. Поскольку каждая фаза достигает своего максимума в разное время в течение цикла тока, тот полюс поля, магнитное поле которого наибольшее, постоянно меняется между тремя полюсами, в результате чего магнитное поле, наблюдаемое ротором, вращается. Скорость вращения магнитного поля, известная как синхронная скорость, зависит от частоты источника питания и числа полюсов, создаваемых обмоткой статора. Для стандартного источника питания 60 Гц, используемого в США, максимальная синхронная скорость составляет 3600 об/мин.
В трехфазном асинхронном двигателе обмотки ротора подключены не к источнику питания, а к источнику питания.
Постоянный ток — Постоянный ток, при котором ток в цепи примерно постоянен во времени.
Ротор — Та часть электродвигателя, которая может свободно вращаться, включая вал, якорь и соединение с машиной.
Статор — Та часть электродвигателя, которая не может свободно вращаться, включая катушки возбуждения.
Крутящий момент — Способность или сила, необходимая для поворота или вращения вала или другого объекта.
по сути являются короткими замыканиями. Наиболее распространенный тип обмотки ротора, обмотка с беличьей клеткой, очень похож на беговое колесо, используемое в клетках для домашних песчанок. Когда двигатель первоначально включен и ротор неподвижен, проводники ротора подвергаются воздействию изменяющегося магнитного поля, проходящего с синхронной скоростью. Согласно закону Фарадея, эта ситуация приводит к индукции токов вокруг обмоток ротора; величина этого тока зависит от импеданса обмоток ротора. Поскольку теперь выполнены условия для двигательного действия, то есть проводники с током находятся в магнитном поле, ротор испытывает крутящий момент и начинает вращаться.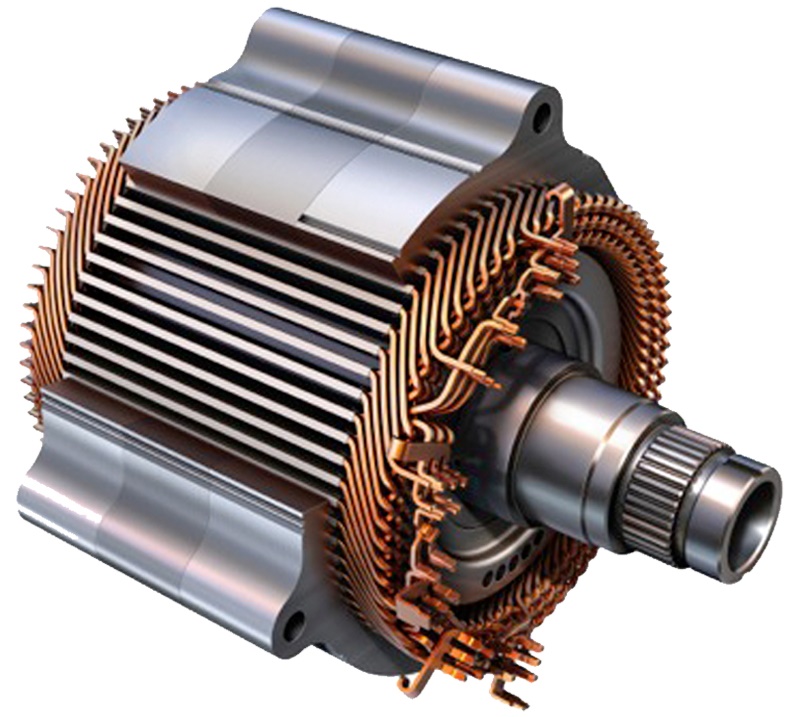 Ротор никогда не может вращаться с синхронной скоростью, потому что не было бы относительного движения между магнитным полем и обмотками ротора и не мог бы индуцироваться ток. Асинхронный двигатель имеет высокий пусковой момент.
Ротор никогда не может вращаться с синхронной скоростью, потому что не было бы относительного движения между магнитным полем и обмотками ротора и не мог бы индуцироваться ток. Асинхронный двигатель имеет высокий пусковой момент.
В двигателях с короткозамкнутым ротором скорость двигателя определяется нагрузкой, которую он приводит в действие, и количеством полюсов, создающих магнитное поле в статоре. Если некоторые полюса включены или выключены, скорость двигателя можно регулировать постепенно. В двигателях с фазным ротором полное сопротивление обмоток ротора можно изменять извне, что изменяет ток в обмотках и, таким образом, обеспечивает непрерывное регулирование скорости.
Трехфазные синхронные двигатели сильно отличаются от асинхронных двигателей. В синхронном двигателе ротор использует катушку с постоянным током для создания постоянного магнитного поля. После приближения ротора к синхронной скорости двигателя северный (южный) полюс магнита ротора замыкается на южный (северный) полюс вращающегося поля статора, и ротор вращается с синхронной скоростью.