Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
- Принцип преобразования энергии
- Виды двигателей и их устройство
- Асинхронные
- Синхронные
- История изобретения
- Подключение к однофазным и трехфазным источникам питания
- Преимущества и недостатки электрических двигателей переменного тока
- Применение
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока.
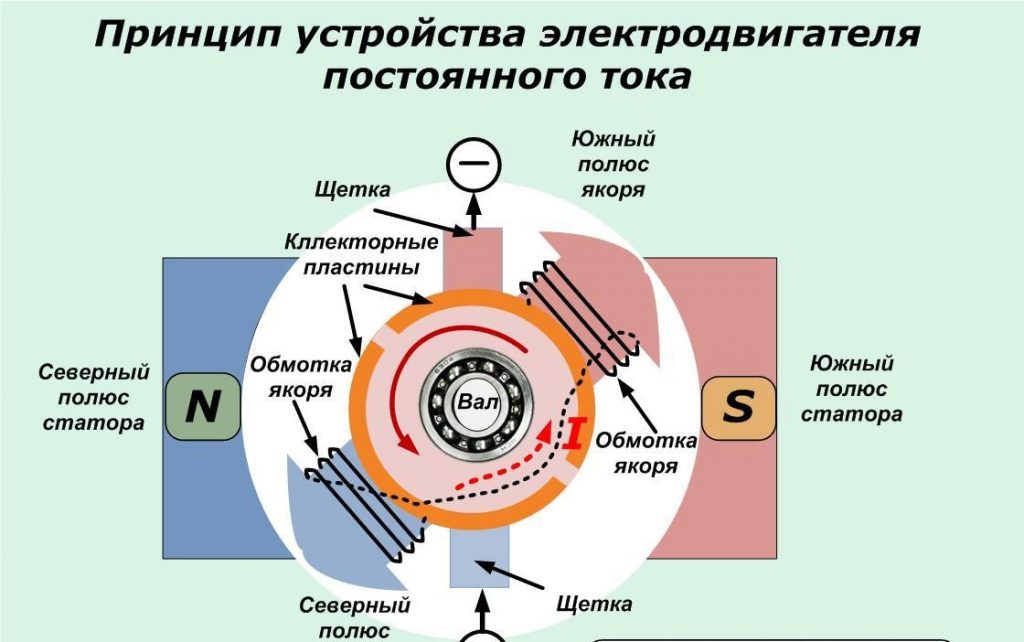
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
 Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой». - Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.

Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
- Принцип преобразования энергии
- Виды двигателей и их устройство
- Асинхронные
- Синхронные
- История изобретения
- Подключение к однофазным и трехфазным источникам питания
- Преимущества и недостатки электрических двигателей переменного тока
- Применение
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.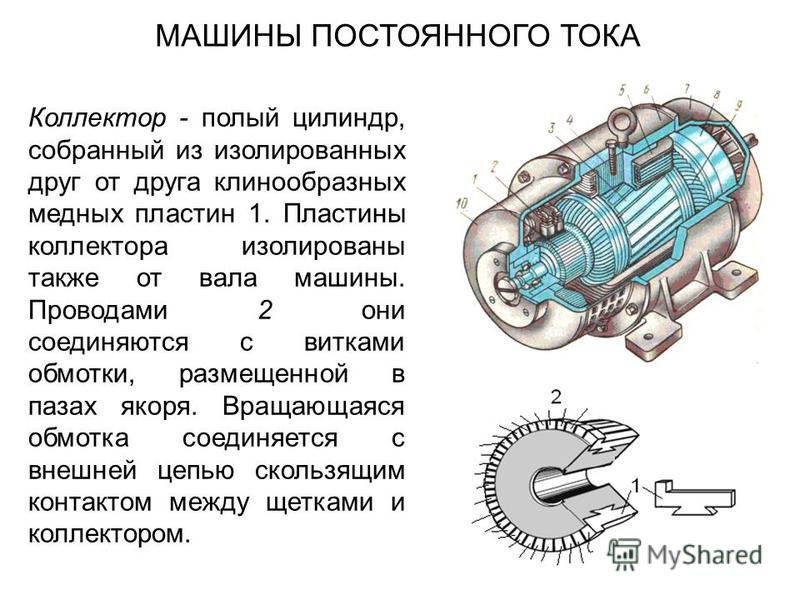
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
 Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой». - Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.

Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
- Принцип преобразования энергии
- Виды двигателей и их устройство
- Асинхронные
- Синхронные
- История изобретения
- Подключение к однофазным и трехфазным источникам питания
- Преимущества и недостатки электрических двигателей переменного тока
- Применение
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
 Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой». - Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.

Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Основы двигателя переменного тока
Информация о продукте Решения Техническая информация Размер двигателя Загрузки Виртуальный выставочный зал Свяжитесь с нами
αSTEP Шаговые двигатели Бесщеточные двигатели постоянного тока Серводвигатели Редукторные двигатели переменного тока Линейные приводы Поворотные приводы Сетевые продукты Вентиляторы охлаждения
Бесплатная доставка для онлайн-заказов. Принять условия.
Двигатели переменного тока и мотор-редукторы > Технология > Основы двигателей переменного тока
Загрузить PDF
Двигатели переменного тока — это электродвигатели, которые вращаются за счет энергии от коммерческого источника переменного тока. Они просты в обращении и имеют функции, которые можно настроить по низкой цене. Они широко используются для питания различных устройств.
Они просты в обращении и имеют функции, которые можно настроить по низкой цене. Они широко используются для питания различных устройств.
1.1 Простота в использовании, низкая стоимость
Простое управление двигателями переменного тока путем подключения двигателя к источнику питания переменного тока. Возможен старт с низкими затратами. Для однофазного двигателя подключите конденсатор между источником питания и двигателем.
1.2 Конструкция двигателя переменного тока
На следующем рисунке показана конструкция стандартного двигателя переменного тока.
1. Фланцевый кронштейн Литой алюминиевый кронштейн с механической обработкой, запрессованный в корпус двигателя и изоляционная пленка
3. Корпус двигателя из литого под давлением алюминия с механической обработкой внутри
4. Ротор Пластины из электромагнитной стали с литым под давлением алюминием
5. Выходной вал доступен с круглым валом и валом-шестерней. Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке.
Металл, используемый в валу, — S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке.
6. Подшипник шариковый
7. Токопроводы с термостойким полиэтиленовым покрытием
8. Краска обожженная отделка из акриловой смолы или меламиновой смолы
1.3 Принцип действия двигателей переменного тока 1 (диск Араго)
Двигатели переменного тока генерируют «магнитный поток» и «индуктивный ток» внутри двигателя за счет действия статора и ротора, и получить вращательную силу.
Принцип работы двигателей переменного тока можно объяснить с помощью диска Араго.
Диск Араго — явление, когда магнит перемещается по поверхности металлического диска, диск вращается вслед за магнитом. Сначала подготовьте круглую медную пластину, которая может свободно вращаться, и магнит. Поместите их так, чтобы медная пластина находилась между магнитными полюсами, но магнит не касался медной пластины.
Сначала подготовьте круглую медную пластину, которая может свободно вращаться, и магнит. Поместите их так, чтобы медная пластина находилась между магнитными полюсами, но магнит не касался медной пластины.
Затем переместите U-образный магнит вдоль края медной пластины. Медная пластина начнет вращаться и преследовать магнит.
Принцип работы диска Араго
Принцип работы диска Араго можно объяснить с помощью «Правила правой руки Флеминга» и «Правила левой руки Флеминга».
Правило правой руки Флеминга указывает направление индукционного тока (для генераторов), когда проводник проходит через линии магнитного потока.
Правило левой руки Флеминга указывает направление электродвижущей силы (для двигателей), когда проводник проходит через линии магнитного потока.
Применим эти два закона к отношениям между медной пластиной и магнитом в порядке правила правой руки, затем правила левой руки.
Скорость вращения медного диска будет немного меньше скорости вращения магнита. Это позволяет генерировать силу вращения проводником, проходящим через магнитное поле.
1.4 Принцип работы двигателей переменного тока 2 (вращающееся магнитное поле)
Замена дисков Араго на статоры и роторы
Принцип работы двигателя переменного тока можно объяснить, заменив диск Араго на внутреннюю структуру двигателя переменного тока. Электромагниты с полюсом N и полюсом S представляют собой упрощенную модель статора. Замкнутая катушка в центре представляет собой упрощенную модель проводящего ротора.
Поместите замкнутую катушку в магнитное поле и поверните внешний магнит по часовой стрелке. Затем в катушке протекает индукционный ток. Когда течет ток, он взаимодействует с магнитным полем и создает электродвижущую силу в катушке. Катушка начинает вращаться в том же направлении, что и магнит.
В реальном двигателе ротор подобен ряду перекрывающихся катушек, соединенных вместе, чтобы вращательная сила могла создаваться эффективно.
Ротор с короткозамкнутым ротором представляет собой ротор с несколькими перекошенными алюминиевыми и железными стержнями. В короткозамкнутом роторе ток течет по алюминиевой части.
Вращающееся магнитное поле (однофазный источник питания, трехфазный источник питания)
Поскольку статор создает вращающееся магнитное поле вокруг ротора, ротор вращается.
В следующем разделе объясняется, как двигатель переменного тока создает вращающееся магнитное поле.
Однофазный источник питания — фазовый сдвиг с использованием конденсатора
Внутри однофазного двигателя имеются две обмотки: основная и вспомогательная.
Подсоедините основную обмотку к источнику питания, а вспомогательную обмотку к источнику питания через конденсатор.
Ток от источника питания поступает непосредственно на основную обмотку. С другой стороны, ток через конденсатор протекает через вспомогательную обмотку.
При работе с однофазным источником питания мы используем фазокомпенсирующий конденсатор, чтобы генерировать форму волны, близкую к двухфазному источнику питания, и генерировать вращающееся магнитное поле.
При подключении однофазного источника питания повторите действия с ① по ④.
①На основную обмотку подается напряжение, на вспомогательную обмотку напряжение не подается. Полюс N и полюс S генерируются в магнитном полюсе основной обмотки.
②На вспомогательную обмотку подается напряжение, а на основную обмотку напряжение не подается. Полюс N и полюс S генерируются в магнитном полюсе вспомогательной обмотки.
③На основную обмотку подается напряжение, на вспомогательную обмотку напряжение не подается. Магнитный полюс, противоположный тому, что в ①, создается в магнитном полюсе основной обмотки.
④На вспомогательную обмотку подается напряжение, на основную обмотку напряжение не подается. Магнитный полюс, противоположный тому, что в ②, создается в магнитных полюсах вспомогательной обмотки.
Таким образом, магнитное поле, создаваемое в статоре, изменяется, вызывая вращение по часовой стрелке.
Для трехфазного источника питания – сдвиг фаз источника питания
В однофазных двигателях две обмотки, основная и вспомогательная, а трехфазные двигатели состоят из трех обмоток.
Предполагая наличие фаз U, V, W на стороне источника питания, существует три пути, по которым может протекать ток: UV, VW, WU. Подключите эти обмотки непосредственно к источнику питания.
В линии U, V, W трехфазного питания каждая фаза смещена на 120°. Поскольку этот фазовый сдвиг создает вращающееся магнитное поле в статоре, нет необходимости подключать конденсатор, например, в однофазном двигателе.
1.5 Типы двигателей переменного тока
Асинхронный двигатель
Асинхронные двигатели идеально подходят для приложений, которые работают непрерывно в одном направлении.
Реверсивный двигатель
Реверсивные двигатели идеально подходят для приложений, где часто повторяются двунаправленные операции.
Включив простой тормоз и увеличив пусковой момент, можно мгновенно изменить направление вращения двигателя.
• Структура простого тормоза
Реверсивные двигатели имеют простой тормозной механизм (фрикционный тормоз) в задней части двигателя.
Тормозной механизм постоянно давит на тормозную колодку, которая трется о тормозной диск. После остановки двигателя перебег может быть значительно уменьшен по сравнению с асинхронным двигателем.
Электродвигатель с электромагнитным тормозом
Электродвигатели с электромагнитным тормозом идеально подходят для приложений, требующих удержания груза, таких как вертикальный привод.
Включение электромагнитного тормоза без возбуждения позволяет удерживать нагрузку при отключении питания.
Электромагнитные тормоза поставляются с асинхронными и реверсивными двигателями.
- Поиск по артикулу
- Слайд с содержанием
- Слайд с содержанием
Теория двигателей переменного тока | Наука
Обновлено 8 декабря 2018 г.
Дж. Дайанн Дотсон
Никола Тесла изобрел двигатели переменного тока или двигатели переменного тока в конце 19 века. Двигатели переменного тока отличаются от двигателей постоянного или постоянного тока тем, что в них используется переменный ток, который меняет направление. Двигатели переменного тока преобразуют электрическую энергию в механическую. Двигатели переменного тока по-прежнему широко используются в современной жизни, и вы можете найти их в бытовой технике и гаджетах в своем собственном доме.
Двигатели переменного тока преобразуют электрическую энергию в механическую. Двигатели переменного тока по-прежнему широко используются в современной жизни, и вы можете найти их в бытовой технике и гаджетах в своем собственном доме.
TL;DR (Too Long; не читал)
Двигатели переменного тока или двигатели переменного тока были изобретены Николой Теслой в 19век. Теория двигателей переменного тока предполагает использование электромагнитов с током для создания силы и, следовательно, движения.
Каков принцип работы двигателя?
Простейший принцип работы двигателя заключается в использовании электромагнитов с током для создания силы для перемещения чего-либо, другими словами, для преобразования электрической энергии в механическую энергию вращения. Двигатели установлены с электромагнитами во вложенных кольцах с полярностью магнитов, чередующейся с севера на юг в кольцах. Магниты ротора движутся, а магниты статора — нет. Северо-южная полярность этих электромагнитов должна постоянно меняться.
Северо-южная полярность этих электромагнитов должна постоянно меняться.
Как работает двигатель переменного тока?
До изобретения Теслы двигатели постоянного тока были преобладающим типом двигателей. Двигатель переменного тока работает, подавая переменный ток на обмотки статора, которые создают вращающееся магнитное поле. Поскольку магнитное поле вращается таким образом, двигателю переменного тока не требуется мощность или механическая помощь для приложения к ротору. Ротор будет вращаться за счет магнитного поля и создавать крутящий момент на приводном валу двигателя. Скорость вращения зависит от количества магнитных полюсов в статоре. Эта скорость называется синхронной скоростью. Однако асинхронные двигатели переменного тока работают с запаздыванием или скольжением, чтобы обеспечить протекание тока ротора.
Различные двигатели переменного тока будут иметь разное количество полюсов и, следовательно, разные скорости по сравнению друг с другом. Однако скорость двигателя переменного тока сама по себе не переменная, а скорее постоянная. Это в отличие от многих двигателей постоянного тока. Двигатели переменного тока не требуют щеток (силовых контактов) или коммутаторов, которые нужны двигателям постоянного тока.
Однако скорость двигателя переменного тока сама по себе не переменная, а скорее постоянная. Это в отличие от многих двигателей постоянного тока. Двигатели переменного тока не требуют щеток (силовых контактов) или коммутаторов, которые нужны двигателям постоянного тока.
Изобретения Теслы сильно изменили ландшафт двигателей, сделав их более эффективными и надежными. Эти двигатели переменного тока произвели революцию в промышленности и проложили путь к использованию во многих устройствах, используемых в 21 веке, таких как кофемолки, душевые вентиляторы, кондиционеры и холодильники.
Сколько существует типов двигателей?
Существует несколько типов двигателей переменного тока, работающих по одному и тому же основному принципу. Многие из этих двигателей представляют собой разновидность асинхронных двигателей переменного тока, хотя более поздний двигатель переменного тока с постоянными магнитами, или PMAC, работает немного по-другому.
Наиболее распространенным двигателем переменного тока является универсальный трехфазный асинхронный двигатель. Этот многофазный двигатель работает с запаздыванием, а не с синхронной скоростью. Эта разница в скорости называется скольжением двигателя. Наведенные токи, протекающие в роторе, вызывают это скольжение, которое при его запуске потребляет большой ток. Из-за скольжения эти двигатели считаются асинхронными. Трехфазные асинхронные двигатели отличаются высокой мощностью и КПД, а также высоким пусковым моментом. Таким двигателям часто требуется механическое пусковое усилие для приведения ротора в движение. Трехфазные асинхронные двигатели представляют собой мощные двигатели, обычно используемые в промышленных устройствах.
Электродвигатели с короткозамкнутым ротором представляют собой двигатель переменного тока, в котором алюминиевые или медные токопроводящие стержни на роторе расположены параллельно валу. Размер и форма токопроводящих стержней влияют на крутящий момент и скорость. Название происходит от сходства устройства с клеткой.
Название происходит от сходства устройства с клеткой.
Асинхронный двигатель с фазным ротором представляет собой тип двигателя переменного тока, который состоит из ротора с обмотками, а не стержней. Асинхронные двигатели с фазным ротором требуют высокого пускового момента. Сопротивление вне ротора влияет на крутящий момент скорости.
Однофазный асинхронный двигатель представляет собой тип двигателя переменного тока, в котором пусковая обмотка добавлена под прямым углом к основной обмотке статора. Универсальные двигатели представляют собой однофазные двигатели и могут работать как от сети переменного, так и постоянного тока. Домашний пылесос, скорее всего, оснащен универсальным мотором.
Конденсаторные двигатели представляют собой тип двигателя переменного тока, который требует добавления емкости для создания фазового сдвига между обмотками. Они удобны для машин, требующих высокого пускового момента, таких как компрессоры.
Конденсаторные двигатели представляют собой тип однофазных двигателей переменного тока, в которых хороший пусковой момент сочетается с работой. В этих двигателях используются конденсаторы, соединенные с вспомогательной пусковой обмоткой. Вы найдете двигатели с конденсаторным двигателем в некоторых вентиляторах печей. В двигателях с конденсаторным пуском используется конденсатор с пусковой обмоткой, которая может создать наибольший пусковой момент. Оба этих типа двигателей требуют двух конденсаторов в дополнение к переключателю, поэтому их детали повышают цену таких двигателей. Если переключатель убрать, получающийся в результате двигатель с постоянными конденсаторами с раздельными конденсаторами будет работать с меньшими затратами, но также будет потреблять меньший пусковой момент. Эти типы двигателей переменного тока, хотя и более дороги в эксплуатации, хорошо работают для нужд с высоким крутящим моментом, таких как воздушные компрессоры и вакуумные насосы.
В этих двигателях используются конденсаторы, соединенные с вспомогательной пусковой обмоткой. Вы найдете двигатели с конденсаторным двигателем в некоторых вентиляторах печей. В двигателях с конденсаторным пуском используется конденсатор с пусковой обмоткой, которая может создать наибольший пусковой момент. Оба этих типа двигателей требуют двух конденсаторов в дополнение к переключателю, поэтому их детали повышают цену таких двигателей. Если переключатель убрать, получающийся в результате двигатель с постоянными конденсаторами с раздельными конденсаторами будет работать с меньшими затратами, но также будет потреблять меньший пусковой момент. Эти типы двигателей переменного тока, хотя и более дороги в эксплуатации, хорошо работают для нужд с высоким крутящим моментом, таких как воздушные компрессоры и вакуумные насосы.
Двигатели с расщепленной фазой — это тип двигателя переменного тока, в котором используется пусковая обмотка малого сечения и различные отношения сопротивления к реактивному сопротивлению. Это дает разность фаз через узкие проводники. Двигатели с расщепленной фазой обеспечивают меньший пусковой момент, чем другие конденсаторные двигатели, и высокий пусковой ток. Поэтому двигатели с расщепленной фазой обычно используются в небольших вентиляторах, небольших шлифовальных машинах или электроинструментах. Мощность двигателей с расщепленной фазой может достигать 1/3 л.с.
Это дает разность фаз через узкие проводники. Двигатели с расщепленной фазой обеспечивают меньший пусковой момент, чем другие конденсаторные двигатели, и высокий пусковой ток. Поэтому двигатели с расщепленной фазой обычно используются в небольших вентиляторах, небольших шлифовальных машинах или электроинструментах. Мощность двигателей с расщепленной фазой может достигать 1/3 л.с.
Двигатели с экранированными полюсами представляют собой тип недорогих однофазных асинхронных двигателей переменного тока с одной обмоткой. Двигатели с экранированными полюсами основаны на магнитном потоке между незатененными и экранированными частями экранирующей катушки из меди. Их лучше всего использовать в качестве небольших одноразовых двигателей, которые не требуют длительного времени работы или большого крутящего момента.
Синхронные двигатели названы так потому, что генерируемые ими магнитные полюса вращают ротор с синхронной скоростью. Количество пар полюсов определяет скорость синхронного двигателя. Подтипы синхронных двигателей включают трехфазные и одиночные синхронные двигатели.
Подтипы синхронных двигателей включают трехфазные и одиночные синхронные двигатели.
Гистерезисные двигатели представляют собой стальные цилиндры, не имеющие обмоток или зубьев. Эти двигатели имеют постоянный крутящий момент и работают плавно, поэтому их часто используют в часах.
В большинстве двигателей переменного тока используются электромагниты, потому что они не ослабевают, в отличие от постоянных магнитов. Однако новые технологии сделали двигатели переменного тока с постоянными магнитами жизнеспособными и даже предпочтительными в определенных обстоятельствах. Двигатели переменного тока с постоянными магнитами или PMAC используются в приложениях, требующих точного крутящего момента и скорости. Это надежные, популярные сегодня моторы. Магниты установлены на роторе либо на его поверхности, либо в пластинах. Магниты, используемые в PMAC, сделаны из редкоземельных элементов. Они производят больший поток, чем индукционные магниты. PMAC — это синхронные машины, которые работают с высокой эффективностью и функционируют независимо от того, является ли потребность в крутящем моменте переменной или постоянной. PMAC работают при более низких температурах, чем другие двигатели переменного тока. Это способствует уменьшению износа деталей двигателя. Из-за их высокой эффективности PMAC потребляют меньше энергии. Более высокие первоначальные затраты в конечном итоге компенсируются длительной работой этого эффективного двигателя.
PMAC работают при более низких температурах, чем другие двигатели переменного тока. Это способствует уменьшению износа деталей двигателя. Из-за их высокой эффективности PMAC потребляют меньше энергии. Более высокие первоначальные затраты в конечном итоге компенсируются длительной работой этого эффективного двигателя.
Может ли любой двигатель переменного тока иметь переменную скорость?
Одним из преимуществ двигателей постоянного тока является то, что их скорость можно изменять. Однако двигатели переменного тока не склонны работать с переменной скоростью. Они работают с постоянной скоростью независимо от нагрузки. Это полезно для поддержания точной скорости. Однако для некоторых приложений требуется переменная скорость. Попытки изменить скорость двигателей переменного тока могут привести к их повреждению или перегреву. Однако есть способы обойти эти проблемы и создать двигатель переменного тока с переменной скоростью. Существуют механические решения для изменения скорости двигателей переменного тока. Это можно сделать с помощью шкивов в некоторых устройствах, например, на токарном станке. Другим механическим решением является использование промежуточного вала.
Это можно сделать с помощью шкивов в некоторых устройствах, например, на токарном станке. Другим механическим решением является использование промежуточного вала.
Многие из современных машин до сих пор работают на основе оригинальных принципов асинхронного двигателя переменного тока Николы Теслы. Эти двигатели выдержали испытание временем благодаря своей адаптивности и долговечности. Инженеры стремятся сделать двигатели более эффективными, с меньшим износом и выделением тепла, что приводит к снижению затрат и меньшему воздействию на окружающую среду.
Принцип работы привода переменного тока
Резюме : В этой статье показан принцип работы привода переменного тока (преобразователь частоты или ЧРП). Также описывается производительность привода переменного тока. Имитационная модель моделируется с помощью MATLAB Simulink, и их результаты также анализируются. Также анализируется общее гармоническое искажение (THD) в сигналах. Использование частотно-регулируемого привода резко увеличилось в области применения HVAC. Обычно приводы переменного тока применяются в системах обработки воздуха, чиллерах, насосах и башенных вентиляторах. Лучшее понимание принципа работы привода переменного тока приводит к улучшению применения и выбора как оборудования, так и системы HVAC. Эта статья предназначена для того, чтобы дать базовое понимание терминов привода переменного тока, работы привода переменного тока и улучшения коэффициента мощности, смягчения гармоник приводом переменного тока и проекта моделирования, чтобы показать, как привод переменного тока полезен для энергосбережения. В дополнение к этому документу будет обсуждаться сравнение частотно-регулируемых приводов и других технологий по отношению к промышленным стандартам.
Использование частотно-регулируемого привода резко увеличилось в области применения HVAC. Обычно приводы переменного тока применяются в системах обработки воздуха, чиллерах, насосах и башенных вентиляторах. Лучшее понимание принципа работы привода переменного тока приводит к улучшению применения и выбора как оборудования, так и системы HVAC. Эта статья предназначена для того, чтобы дать базовое понимание терминов привода переменного тока, работы привода переменного тока и улучшения коэффициента мощности, смягчения гармоник приводом переменного тока и проекта моделирования, чтобы показать, как привод переменного тока полезен для энергосбережения. В дополнение к этому документу будет обсуждаться сравнение частотно-регулируемых приводов и других технологий по отношению к промышленным стандартам.
Введение
Индустрия приводов переменного тока быстро растет, и сейчас как никогда важно, чтобы технические специалисты и обслуживающий персонал обеспечивали бесперебойную работу приводов переменного тока. Приводы переменного тока изменяют скорость двигателя переменного тока путем изменения напряжения и частоты питания, подаваемого на двигатель переменного тока. Чтобы поддерживать надлежащий коэффициент мощности и уменьшить чрезмерный нагрев двигателя, необходимо поддерживать соотношение вольт/герц, указанное на паспортной табличке. Это основная задача ЧРП. Основной принцип работы приводов переменного тока:
Приводы переменного тока изменяют скорость двигателя переменного тока путем изменения напряжения и частоты питания, подаваемого на двигатель переменного тока. Чтобы поддерживать надлежащий коэффициент мощности и уменьшить чрезмерный нагрев двигателя, необходимо поддерживать соотношение вольт/герц, указанное на паспортной табличке. Это основная задача ЧРП. Основной принцип работы приводов переменного тока:
- Приводы переменного тока используются для бесступенчатого управления скоростью асинхронных двигателей с короткозамкнутым ротором, которые в основном используются на технологических установках из-за их прочности и длительного срока службы без обслуживания.
- Привод переменного тока управляет скоростью двигателя переменного тока путем изменения выходного напряжения и частоты с помощью сложного электронного устройства, управляемого микропроцессором.
- Привод переменного тока состоит из выпрямительного и инверторного блоков. Выпрямитель преобразует переменный ток в постоянное напряжение, а инвертор преобразует постоянное напряжение обратно в переменное.

Для понимания основных принципов работы привода переменного тока требуется понимание трех основных частей привода переменного тока: блока выпрямителя, шины постоянного тока и блока инвертора.
Напряжение питания сначала проходит через блок выпрямителя, где оно преобразуется в питание переменного тока в постоянное, трехфазное питание питается трехфазным двухполупериодным диодом, где оно преобразуется в питание постоянного тока. Шина постоянного тока содержит секцию фильтра, в которой отфильтровываются гармоники, возникающие при преобразовании переменного тока в постоянный. Последняя секция состоит из секции инвертора, состоящей из шести IGBT, где отфильтрованный источник постоянного тока преобразуется в квазисинусоидальную волну переменного тока, которая питает подключенный к нему двигатель переменного тока.
Из принципа работы двигателя переменного тока мы знаем, что синхронная скорость двигателя (об/мин) зависит от частоты. Следовательно, изменяя частоту источника питания через привод переменного тока, мы можем управлять скоростью синхронного двигателя:
Следовательно, изменяя частоту источника питания через привод переменного тока, мы можем управлять скоростью синхронного двигателя:
Скорость (об/мин) = частота (Гц) x 120 / количество полюсов
Где:
Частота = электрическая частота источника питания в Гц. Количество полюсов = количество электрических полюсов в статоре двигателя. Таким образом, мы можем удобно регулировать скорость двигателя переменного тока, изменяя частоту, подаваемую на двигатель. Есть еще один способ заставить двигатель переменного тока работать на другой скорости, изменив параметр No. полюсов, но это изменение было бы физическим изменением двигателя. Поскольку ЧРП обеспечивает частоту и выходное напряжение, необходимые для изменения скорости двигателя, это делается с помощью ЧРП с широтно-импульсной модуляцией. Преобразователь частоты с широтно-импульсной модуляцией (ШИМ) генерирует импульсы различной ширины, которые объединяются для создания необходимой формы волны.
Поскольку частота может легко изменяться по сравнению с полюсами двигателя, поэтому часто используются приводы переменного тока.
Работа с постоянным соотношением V/F
Все приводы переменного тока поддерживают постоянное отношение выходного напряжения к частоте (V/f) на всех скоростях по следующей причине. Фазное напряжение V, частота f и магнитный поток ϕ двигателя связаны уравнением:
V = 4,444 ф Н ϕ м
или
V/f = 4,444×Н ϕм
Где N = количество витков на фазу.
ϕm = магнитный поток
Если приложить то же напряжение на пониженной частоте, магнитный поток увеличится и насытит магнитопровод, что значительно исказит работу двигателя. Магнитного насыщения можно избежать, поддерживая постоянным значение ϕm. Кроме того, крутящий момент двигателя переменного тока является произведением магнитного потока статора и тока ротора.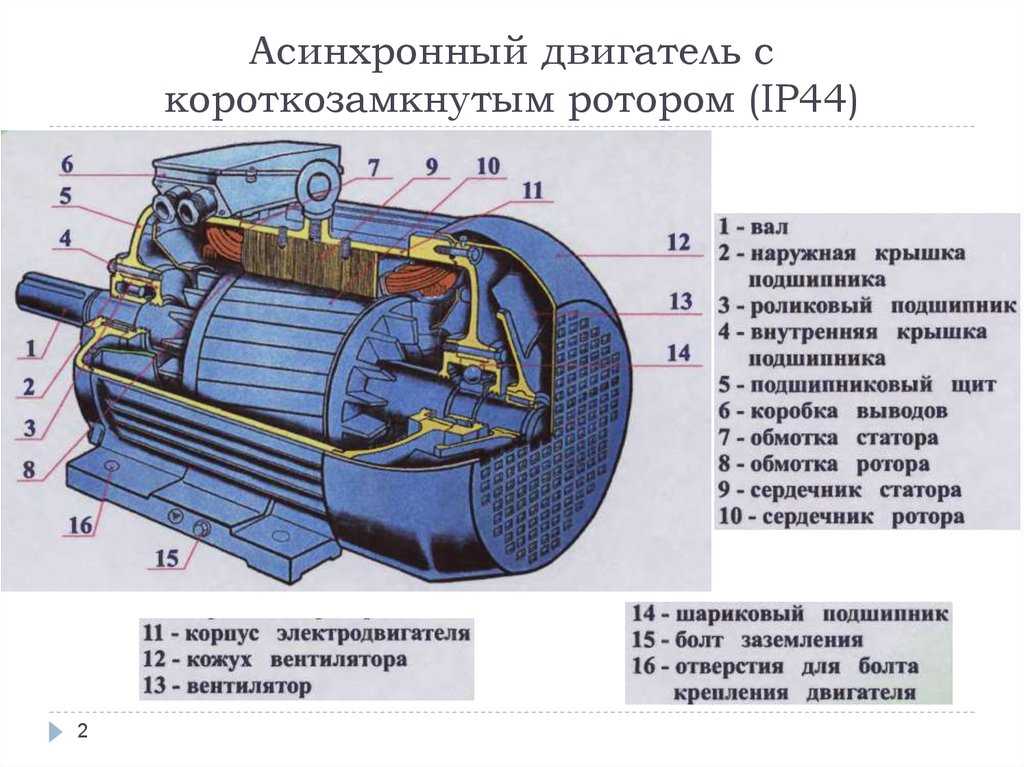 Для поддержания номинального крутящего момента на всех скоростях постоянный поток должен поддерживаться на его номинальном значении, что в основном достигается за счет поддержания постоянного отношения напряжения к частоте (V/f). Это требует снижения напряжения двигателя переменного тока в той же пропорции, что и частота, чтобы избежать магнитного насыщения из-за высокого потока или ниже номинального крутящего момента из-за низкого потока.
Для поддержания номинального крутящего момента на всех скоростях постоянный поток должен поддерживаться на его номинальном значении, что в основном достигается за счет поддержания постоянного отношения напряжения к частоте (V/f). Это требует снижения напряжения двигателя переменного тока в той же пропорции, что и частота, чтобы избежать магнитного насыщения из-за высокого потока или ниже номинального крутящего момента из-за низкого потока.
Как привод переменного тока управляет скоростью двигателя
Поскольку привод переменного тока обеспечивает частоту и выходное напряжение, необходимые для управления скоростью двигателя переменного тока, это осуществляется с помощью ЧРП с ШИМ. ШИМ-приводы производят импульсы различной ширины, которые объединяются для создания необходимой формы волны. В некоторых преобразователях используется диодный мост для уменьшения гармоник. Приводы с ШИМ создают форму волны тока, которая более точно соответствует линейному источнику, что снижает нежелательный нагрев. PWM VFD имеют почти постоянный коэффициент мощности на всех скоростях, который близок к единице. Приводы PWM также могут управлять несколькими двигателями на одном частотно-регулируемом приводе.
PWM VFD имеют почти постоянный коэффициент мощности на всех скоростях, который близок к единице. Приводы PWM также могут управлять несколькими двигателями на одном частотно-регулируемом приводе.
Таким образом, несущая частота получается из скорости переключателя силового устройства, который остается включенным и выключенным. Ее также называют частотой переключения. Следовательно, чем выше несущая частота, тем выше разрешение для ШИМ. Типичная несущая частота находится в диапазоне от 3 кГц до 4 кГц или от 3000 до 4000 раз в секунду по сравнению с более старой несущей частотой на основе SCR, которая колеблется от 250 до 500 раз в секунду. Таким образом, ясно, что чем выше несущая частота, тем выше будет разрешение формы выходного сигнала. Также отмечается, что несущая частота снижает эффективность частотно-регулируемого привода, поскольку приводит к увеличению нагрева цепи частотно-регулируемого привода.
Преимущества привода переменного тока
- Большая экономия энергии на более низкой скорости.

- Увеличенный срок службы вращающихся компонентов за счет более низкой рабочей скорости.
- Снижен уровень шума и вибрации.
- Снижение термических и механических нагрузок.
- Нижняя кВА
- Высокий коэффициент мощности
Схема моделирования
Для управления переменной скоростью электрических машин переменного тока несколько переключателей силовой электроники, таких как IGBT, MOSFET и GTO, используют метод принудительной коммутации. Более ранние методы, такие как двигатель постоянного тока и тиристорный мост, которые заменены новыми методами, такими как преобразователи напряжения (VSC), питаются ШИМ от асинхронной машины. Что касается гибкости управления скоростью и крутящим моментом с помощью машины постоянного тока, то же самое может быть достигнуто за счет сочетания метода ШИМ с современными методами управления, такими как метод ориентированного поля (FOT) или методы прямого управления крутящим моментом (DTC). В этом разделе описано моделирование частотно-регулируемого привода, работающего на асинхронной машине.
В этом разделе описано моделирование частотно-регулируемого привода, работающего на асинхронной машине.
Библиотека машин для моделирования состоит из четырех наиболее распространенных трехфазных асинхронных машин, синхронных машин с постоянными магнитами, упрощенных и полных синхронных машин. Следующая машина может использоваться как в генераторном, так и в моторном режиме. Эти машины можно использовать для моделирования электромеханических переходных процессов в электрической сети в сочетании с линейными и нелинейными элементами, такими как нагрузки трансформаторной линии, выключатели и т. д. Для моделирования частотно-регулируемых приводов они сочетаются с устройствами силовой электроники. Библиотека моделирования силовой электроники содержит диоды, тиристоры, GTO, MOSFET и IGBT. Эти несколько блоков соединяются друг с другом, образуя трехфазные мосты.
Моделирование 4-полюсного двигателя мощностью 3 л.с. выполнено с приводом переменного тока с использованием метода ШИМ.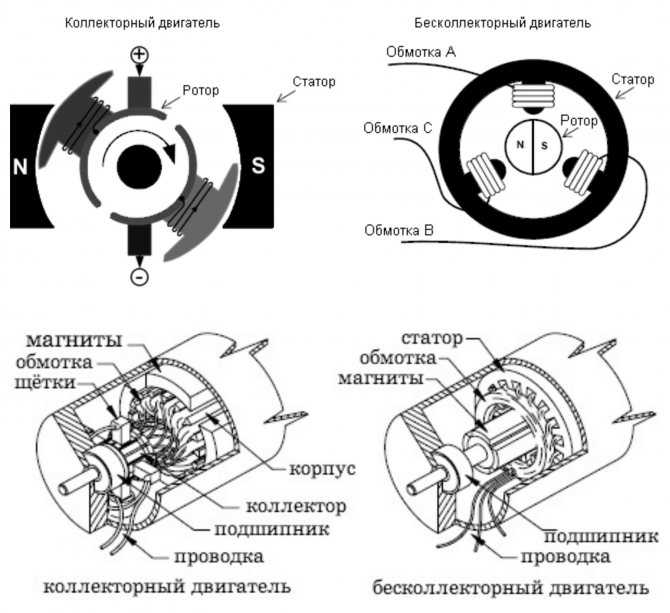 Частота и амплитуда выходного напряжения изменяются с помощью метода ШИМ, и эти контролируемые напряжение и частота используются для управления скоростью двигателя переменного тока.
Частота и амплитуда выходного напряжения изменяются с помощью метода ШИМ, и эти контролируемые напряжение и частота используются для управления скоростью двигателя переменного тока.
Анализ сигналов
Анализируются напряжение, ток, скорость и крутящий момент.
Выполнение анализа гармоник с помощью инструмента БПФ
Во время моделирования основная составляющая напряжения и тока разрешена двумя дискретными блоками Фурье. Таким образом, для наблюдения гармонического компонента нам потребуется дискретный блок Фурье для каждой гармоники. Такой подход не удобен.
Для отображения частотного спектра формы волны тока и напряжения нам требуется инструмент FFT Powergui. С временной переменной, генерируемой блоком осциллографа, сигналы сохраняются в структуре ASM, а сигналы сохраняются в структуре ASM и дискретизируются с фиксированным шагом, который удовлетворяет требованиям инструмента FFT.
Таким образом, Powergui открывается и выбирается анализ БПФ.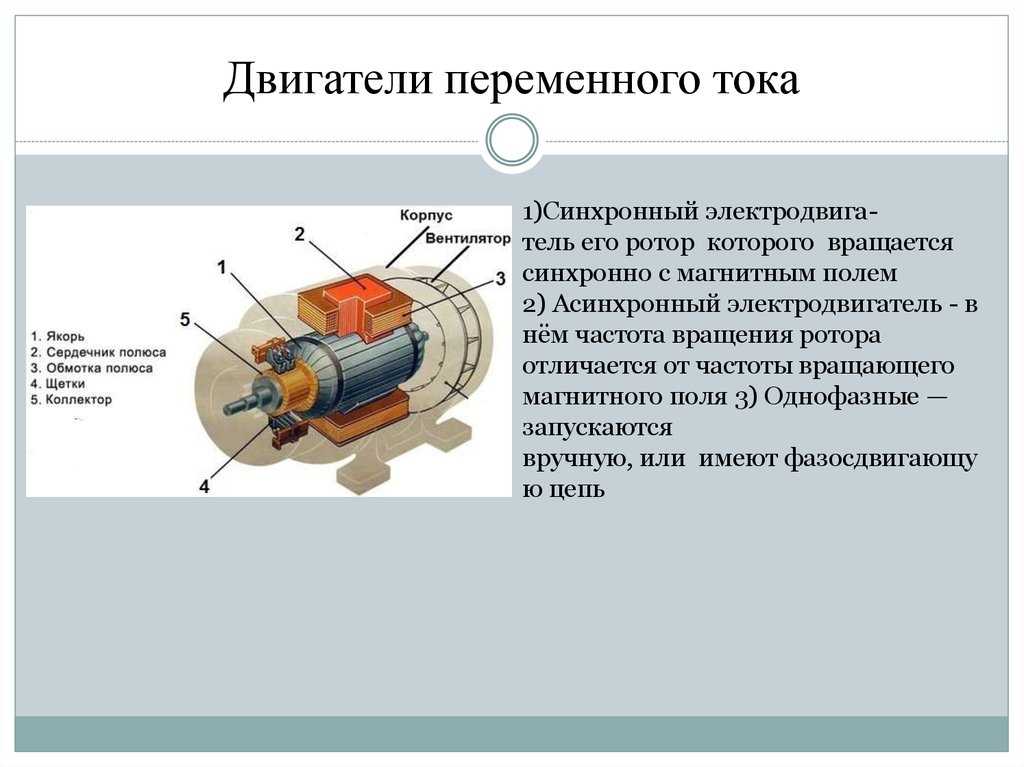 Открывается новое окно. Параметры анализируемого сигнала, временного окна и частотного диапазона устанавливаются следующим образом:
Открывается новое окно. Параметры анализируемого сигнала, временного окна и частотного диапазона устанавливаются следующим образом:
| Структура | КАК М |
| Вход | Ваб |
| Номер сигнала | 1 |
| Время начала | 0,7 с |
| Количество циклов | 2 |
| Основная частота | 60 Гц |
| Максимальная частота | 5000 Гц |
| Ось частоты | Гармонический порядок |
| Стиль отображения | Бар (относительно Fund или DC) |
Таблица 1: Параметры БПФ, представленные в блоке powergui
При выборе параметра «Отображение» отображается анализируемый сигнал. В нижнем окне отображается частотный спектр.
БПФ-анализ межфазного напряжения двигателя
Поскольку дополнение основной гармоники и полное гармоническое искажение (THD) Vab отображаются в окне спектра, величина основной гармоники напряжения привода переменного тока составляет (312 В), что по сравнению с теоретическим значением (311 В для m = 0,4).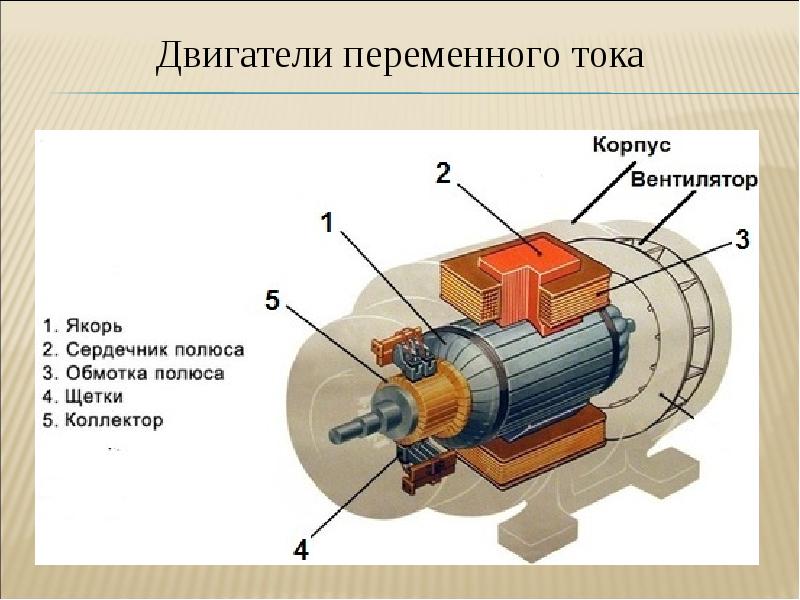
Результат
Результат моделирования рассчитывается для 4-полюсного двигателя переменного тока мощностью 3 л.с. и анализа гармоник с использованием инструмента БПФ для моделирования максимальной частоты 5000 Гц.
| Основная частота | Скорость (об/мин) | Порядок гармоник | THD напряжения | THD тока |
| 80 | 2400 | 62,5 (четное) | 106,25% | 30,49% |
| 75 | 2250 | 66,66 (четное) | 81,86% | 19,65% |
| 70 | 2100 | 71,42 (нечетное) | 67,89% | 14,91% |
| 65 | 1950 г. | 76,92 (четное) | 55,46% | 12,20% |
| 60 | 1800 | 83,33 (нечетное) | 78,59% | 11,46% |
| 55 | 1650 | 90,90 (четное) | 55,85% | 18,72% |
| 50 | 1500 | 100 (четное) | 76,85% | 32,86% |
| 45 | 1350 | 111,11 (нечетное) | 126,29% | 37,35% |
Таблица 2: Анализ данных частоты
Понятно, что уровень THD (V) увеличивается с увеличением значения основной частоты от 70 Гц, а также при уменьшении основной частоты до 45 Гц или ниже. Таким образом, диапазон изменений основной частоты должен находиться в пределах от 70 до 45 Гц. Также видно, что значения THD (V) в случае 70 Гц, 60 Гц и 45 Гц довольно высоки по сравнению с другими частотами, присутствующими между ними, это связано с наличием нечетных гармоник на этих частотах, поскольку мы знаем, что Нечетные гармоники более вредны для распространения искажений в цепи, чем ЧЕТНЫЕ гармоники. Поскольку максимальная частота установлена как 5000 Гц, можно легко рассчитать порядок гармоник. Таким образом, потребление электроэнергии зависит от требований нагрузки. Однако изменение частоты приводит к гармоническим искажениям, которые можно уменьшить с помощью нескольких методов подавления гармоник.
Таким образом, диапазон изменений основной частоты должен находиться в пределах от 70 до 45 Гц. Также видно, что значения THD (V) в случае 70 Гц, 60 Гц и 45 Гц довольно высоки по сравнению с другими частотами, присутствующими между ними, это связано с наличием нечетных гармоник на этих частотах, поскольку мы знаем, что Нечетные гармоники более вредны для распространения искажений в цепи, чем ЧЕТНЫЕ гармоники. Поскольку максимальная частота установлена как 5000 Гц, можно легко рассчитать порядок гармоник. Таким образом, потребление электроэнергии зависит от требований нагрузки. Однако изменение частоты приводит к гармоническим искажениям, которые можно уменьшить с помощью нескольких методов подавления гармоник.
Отклонение THD между основными частотами постоянно меняется, поэтому существует отклонение для искажения, что приводит к расчету экономии энергии, а также к управлению скоростью двигателя переменного тока. Дальнейшее внедрение методов фильтрации может привести к снижению уровня гармоник в цепи. В принципе применение Band Pass Active Filter вполне подходит для подавления гармоник на этом уровне. Его можно представить как будущую исследовательскую работу данной статьи.
В принципе применение Band Pass Active Filter вполне подходит для подавления гармоник на этом уровне. Его можно представить как будущую исследовательскую работу данной статьи.
Заключение
Таким образом, из анализа таблицы видно, что изменение частоты приводит к изменению гармоник в машине также по мере того, как скорость уменьшается, общее гармоническое искажение в напряжении, а также в токе увеличивается, а THD в напряжении ниже, чем THD в токе. Следует также отметить, что слишком большое изменение частоты также приводит к увеличению напряжения THD, а также уровней тока THD. Таким образом, частотно-регулируемый привод может заставить двигатель переменного тока работать с переменной скоростью, а также экономить энергию.
Для обеспечения высокой производительности частотно-регулируемого привода для максимальной производительности процесса всегда требовалось комплексное инженерное решение. Однако быстрое усовершенствование технологии управления переменным током в сочетании с доступностью стандартной фиксированной частоты двигателя переменного тока увеличило число возможных решений. С помощью процесса ШИМ частота, подаваемая на двигатель переменного тока, может быть установлена для управления скоростью двигателя переменного тока. Таким образом, потребление электроэнергии зависит от требований нагрузки. Однако изменение частоты приводит к гармоническим искажениям, которые можно уменьшить с помощью нескольких методов подавления гармоник.
С помощью процесса ШИМ частота, подаваемая на двигатель переменного тока, может быть установлена для управления скоростью двигателя переменного тока. Таким образом, потребление электроэнергии зависит от требований нагрузки. Однако изменение частоты приводит к гармоническим искажениям, которые можно уменьшить с помощью нескольких методов подавления гармоник.
Методы устранения гармоник в основном применяются к низшим гармоникам, потому что, поскольку фильтрация более практична для более высоких гармоник, фильтрующий компонент может быть меньше и дешевле. Также применение нескольких многоуровневых приводов переменного тока обеспечивает еще один подход к подавлению гармоник. Для подавления гармоник в цепи привода переменного тока требуется применение в цепи активных фильтров, таких как полосовой активный фильтр.
Таким образом, после изучения принципа работы привода переменного тока становится возможным управлять скоростью двигателя переменного тока, а также экономить электроэнергию, поскольку мы знаем, что энергосбережение стало важным вопросом во всем мире.