Как работает электродвигатель [для чайников]
Сегодня электродвигатели всё чаще приходят на замену безнадежно устаревшим бензиновым агрегатам и используются как в современном транспорте, так и в многочисленных электронных устройствах. Примеры использования этих силовых агрегатов можно встретить повсюду. Вибровызов в телефоне осуществляется благодаря работе электродвигателя, современный электровелосипед тоже едет благодаря электродвигателю и даже «любимое» метро — всё это электродвигатели.
Разновидностей электродвигателей сегодня существует огромное количество, но есть один важный фактор, который будет практически для всех них схожим. Речь идёт о физике работы этого типа устройств. Отметим, что далеко не все они будут использовать в своей работе описываемый далее принцип, но большая часть электродвигателей работают именно так. Как минимум, физический эффект, на котором всё это держится, сохраняется. Прежде, чем обсуждать подробно физику процесса, благодаря которому происходит вращение электродвигателя, рассмотрим сначала конструкцию простейшего двигателя.
Как минимум, физический эффект, на котором всё это держится, сохраняется. Прежде, чем обсуждать подробно физику процесса, благодаря которому происходит вращение электродвигателя, рассмотрим сначала конструкцию простейшего двигателя.
Конструкция простейшего электродвигателя
Простейший электродвигательОпять-таки, отметим, что рассматриваемая конструкция — это далеко не единственный вариант реализации подобных устройств. Однако, большая часть приборов работает именно так и среди бытовых приборов или в транспорте вы вряд ли обнаружите что-то другое. Поэтому, рассмотрим простейшую схему и элементарный вариант реализации прибора.
Конструкция самого простого электродвигателя является довольно примитивной. Он состоит из статора и ротора. Всё это убрано в корпус и подсоединяется проводами к источнику электрической энергии. Ещё есть подшипники, но это вещь сугубо механическая и нас сейчас не особенно интересует.
Части двигателя
Статор — это неподвижная часть. Преимущественно неподвижная часть представлена постоянными магнитами. Но бывает и обратный вариант, когда на статоре выполнена обмотка. Различие обусловлено тем, в сети какого типа работает двигатель — постоянного или переменного тока.
Преимущественно неподвижная часть представлена постоянными магнитами. Но бывает и обратный вариант, когда на статоре выполнена обмотка. Различие обусловлено тем, в сети какого типа работает двигатель — постоянного или переменного тока.
Ротор — это подвижная часть, которая, как правило является якорем, а на нем выполнена обмотка. К ротору подходят щётки, на которые подается электрический ток.
Щетки подключаются проводами к источнику питания. Именно они «передают электричество». Но щетки есть не во всех конструкциях двигателей.
Вся конструкция смонтирована в корпус и в закрытом виде представляет собой готовый к работе силовой агрегат. Иногда на ротор двигателя ещё добавляется крыльчатка вентилятора, которая обеспечивает циркуляцию воздуха через агрегат и его дополнительное охлаждение. Так обычно монтируются двигатели постоянного тока.
На валу двигателя мы получаем крутящий момент, который прекрасно можно использовать для своих нужд. Например, передать его посредством зубчатой передачи на редуктор или использовать непосредственно для получения полезной работы (как в вентиляторе дома).
Например, передать его посредством зубчатой передачи на редуктор или использовать непосредственно для получения полезной работы (как в вентиляторе дома).
Женщина доила корову, а воде отражалось всё наоборот. Такое может быть и с конструкцией электродвигателя. Тогда намотка там будет на статоре, вместо ротора. Это уже будут двигатели переменного тока. Сам же ротор будет выполнен или из постоянных магнитов, или выглядеть как короткозамкнутая клетка (её ещё именуют беличье колесо).
Бывает также, что и статор, и ротор электродвигателя представляют собой обмотки. Тогда картина незначительно меняется. Правда смысл всё равно сохраняется прежним. Про принципы конструирования таких машин мы поговорим чуть позже.
Принцип работы любого электродвигателя
Физический принцип работы электродвигателя держится на свойствах рамки с током в магнитном поле. Самое простое объяснение эффекта будет поверхностным, но ясным. Вспомните, как ведут себя два магнита, которые мы сводим одноименными полюсами. Они отталкиваются! При некотором приближении, можно сказать, что это и есть физический принцип работы любого электродвигателя. Для начала советую изучить мою статью про электромагнитную индукцию на сайте.
Они отталкиваются! При некотором приближении, можно сказать, что это и есть физический принцип работы любого электродвигателя. Для начала советую изучить мою статью про электромагнитную индукцию на сайте.
Тем или иным способом нам нужно создать два магнитных поля, которые оттолкнут друг друга. Если одно поле создать на крутящемся якоре, а второе на корпусе или статоре, то одно поле будет толкать другое, а движение будет превращаться в крутящий момент и получится двигатель. Дальше остается только поиграться с конструкцией. И таких конструкций известно много, но мы обсудим самые распространенные. Это двигатель постоянного тока и двигатель переменного тока. Последний вариант разделяют на синхронные и асинхронные.
Физический принцип работы электродвигателя постоянного тока
Если мы вспомним закон Ампера, то будет понятно, что на проводник с током в магнитном поле действует некоторая сила. Именно это обстоятельство позволяет получить вращающийся якорь.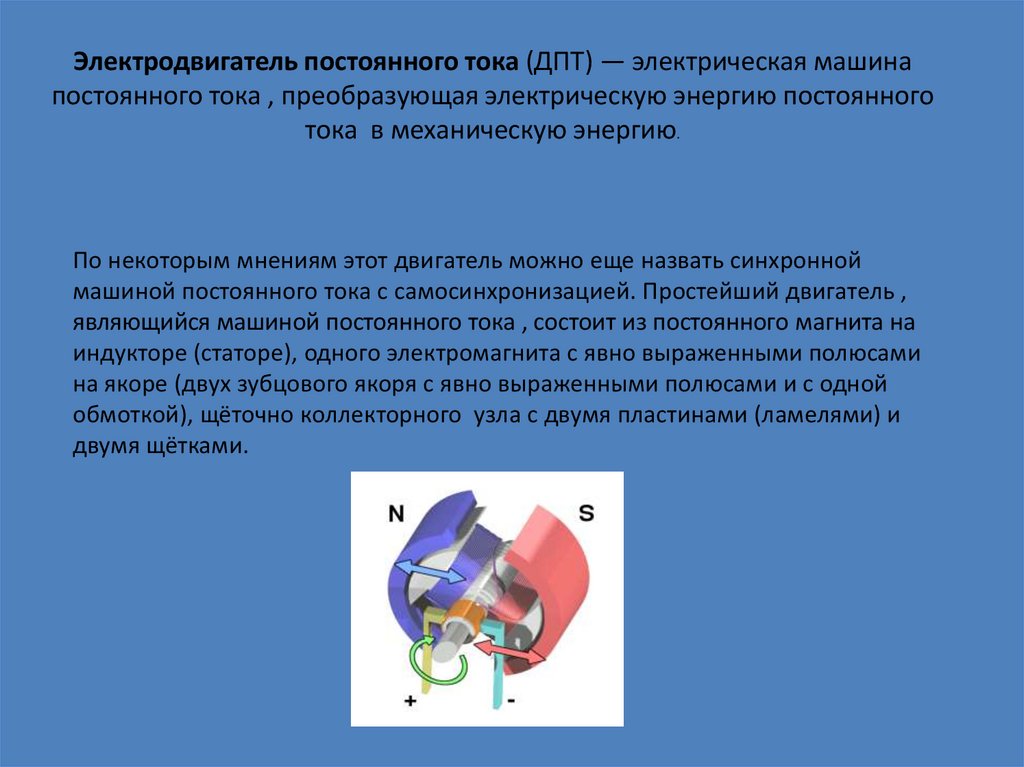
Вспомним самый простой опыт, который показывают школьникам. Рамку с током помещают в магнитное поле и она начинает двигаться. Правда двигается она недолго, а скорее дергается. Всему виной несовпадение векторов. Размести мы магниты слегка иначе и получили бы постоянное движение.
Силы Ампера, действующие на боковые стороны рамки, будут создавать вращающий момент, величина которого пропорциональна магнитной индукции, силе тока в рамке, ее площади S и зависит от угла a между вектором магнитной индукции и нормалью к рамке.
Рамка с током в магнитном полеВ представленной ситуации рамка будет вращаться только тогда, когда вектора Fа будут не деформировать её, а придавать вращательное движение.
Вот так крутится рамкаДля этого в данном примере рамку нужно повернуть на 90 градусов. Теперь представим, что якорь нашего двигателя весь состоит из таких рамок, их очень много. Это улучшит процесс движения.
Вот и получился самый простой электрический двигатель постоянного тока.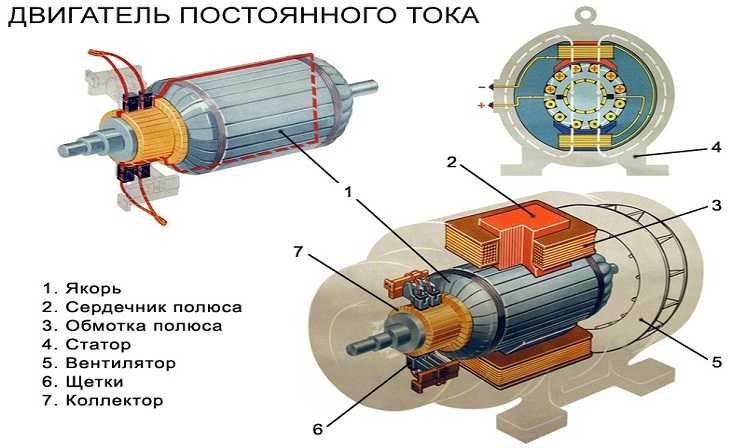
Теперь представим, как будет выглядеть поведение такого двигателя при включении в цепь с переменным током. Он начнет танцевать в разные стороны. Ведь переменный электрический ток отличается тем, что регулярно меняет своё направление. Рамка с током, через которую он проходит, будет также менять направление своего движения. Крутиться равномерно такая штука не сможет. Поэтому, в переменных сетях используется двигатели переменного тока. Двигатель постоянного тока конечно же сможет работать в переменной сети, но для этого нужно использовать выпрямитель перед ним.
Правда бывают и универсальные электродвигатели, которые одинаково комфортно юзаются и там, и там. Но про это чуть позже.
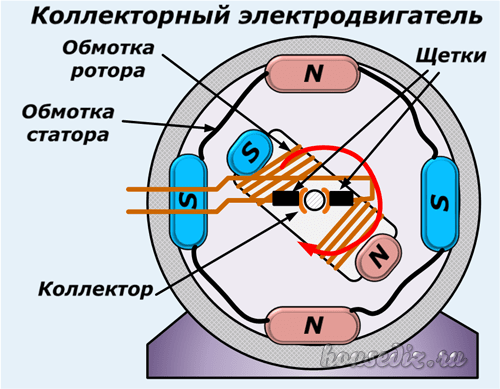
Физический принцип работы электродвигателя переменного тока
Тут логика работы строится немного иначе. Обмотка у нас находится на статоре. А вот ротор представляет собой сердечник со специальной замкнутой рамкой или постоянными магнитами. Так проще обыграть постоянную смену направления тока.
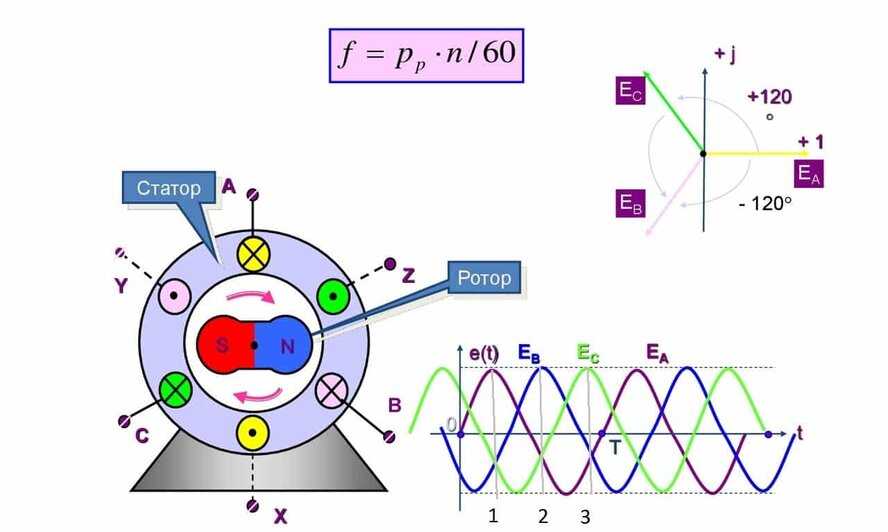
Если двигатель переменного тока однофазный (или, правильнее сказать, может работать в нашей электрической цепи на 220 В) , то в обмотке статора при прохождении тока создается пульсирующее магнитное поле. Это поле раскладывается на два поля, имеющих равные амплитуды и вращающиеся в противоположные стороны с одинаковой частотой. Для разложения мы просто делаем замкнутый контур и получаем, что по одной части контура ток идёт в одну сторону, а по другой — в противоположную. Вот вам и момент, который крутанет рамку с током. А точнее — ротор определенной конструкции. Дальше обмотку статора «разносят» на 180 градусов и получают рабочую схему.
Поскольку полярность тока на статоре постоянно меняется, получается что генерируемое магнитное поле тоже меняет направление и регулярно, в соответствии с фазой колебания, «даёт пинок» нашему якорю. Этот процесс и порождает непрерывное равномерное движение ротора. Но есть тут один прикол!
Если двигатель однофазный, то прежде, чем он начнет работать, его ротор нужно крутануть.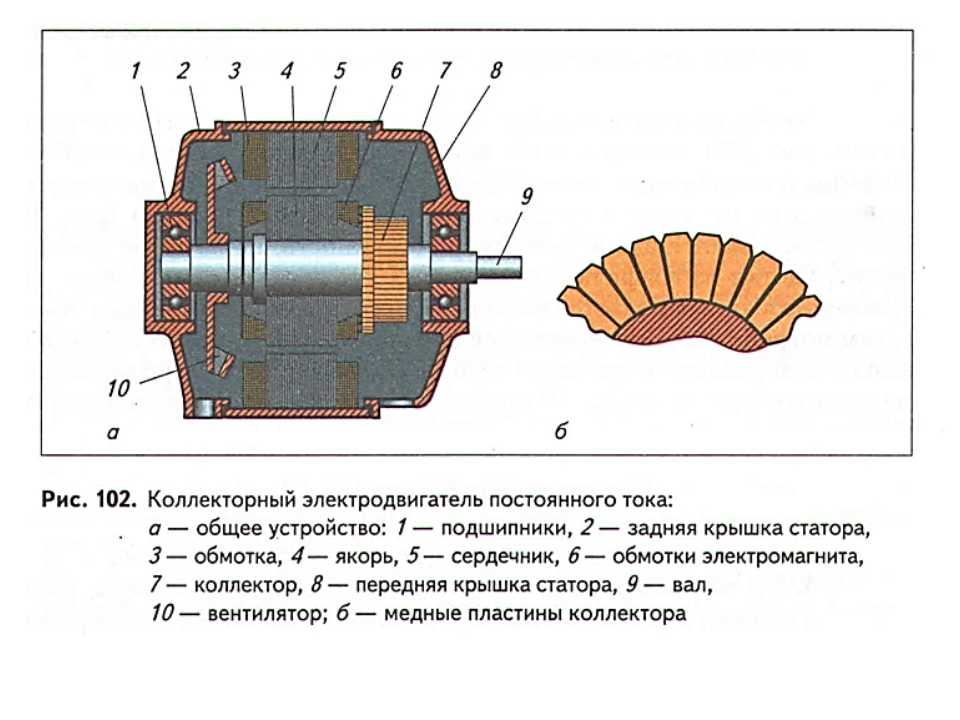 Или же магнитное поле так и будет пульсировать, а ротор так и будет стоять. Для этого обычно используется дополнительная обмотка или прочие ухищрения. Для создания вращающегося магнитного поля необходимо, чтобы магнитный поток через пусковую обмотку был сдвинут по фазе относительно рабочей. Но про это как-нибудь в другой раз.
Или же магнитное поле так и будет пульсировать, а ротор так и будет стоять. Для этого обычно используется дополнительная обмотка или прочие ухищрения. Для создания вращающегося магнитного поля необходимо, чтобы магнитный поток через пусковую обмотку был сдвинут по фазе относительно рабочей. Но про это как-нибудь в другой раз.
Отметим, что этого недуга лишены трехфазные двигатели переменного тока. Там всё тоже самое, но поскольку у нас есть три разных фазы с разными точками максимальных значений относительно времени, в статоре создается вращающееся магнитное поле.
Оно начинает бегать по кругу, а заодно пинает ротор. Этот процесс и порождает непрерывное равномерное движение ротора. Тут уже не нужно никакое возбуждение, потому что ротор будет регулярно пинаться по кругу, как карусель, раскручиваемый детьми.
Синхронный и асинхронный двигатели переменного тока
Двигатели переменного тока подразделяют на синхронные и асинхронные. Для постоянного тока это разделение не имеет особого смысла. Ведь там нет как такового понятия фаза и изменения направления тока.
Для постоянного тока это разделение не имеет особого смысла. Ведь там нет как такового понятия фаза и изменения направления тока.
Логика работы в обоих двигателях одинаковая. Но, судя по названию, в асинхронном что-то должно происходить ни в такт с основным процессом.
Синхронный и асинхронный двигатели отличаются преимущественно конструкцией ротора.
В роторе синхронного двигателя предусмотрена обмотка с независимой подачей напряжения или постоянные магнитики. Они толкают ротор относительно пульсирующего магнитного поля.
Ротор синхронного двигателяУ асинхронного ротора ток формируется с помощью магнитного статорного поля. В соответствии с законом электромагнитной индукции под действием прямого и обратного магнитных потоков в обмотке ротора станет действовать электродвижущая сила. Ротор похож по своей конструкции на колесо для грызуна. Но бывают и варианты с обмоткой, расположенной определенным образом.
Ротор асинхронного двигателяВ синхронном двигателе поля статора и ротора взаимодействуют друг с другом и имеют равную скорость. Ротор вращается в соответствии и точно в такт с полем статора. Частота вращения ротора синхронна частоте тока обмотки статора.
Ротор вращается в соответствии и точно в такт с полем статора. Частота вращения ротора синхронна частоте тока обмотки статора.
У асинхронных агрегатов имеет место разность магнитного поля роторного и статорного механизма на величину скольжения. Это то самое проскальзывание. Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора.
Не забываем, что обмотка ротора асинхронного двигателя, будь-то клетка или катушки под 120 градусов, является замкнутым контуром. В ней наводится ЭДС, а возникающий магнитный поток придает вращение ротору, отталкиваясь от пульсирующего магнитного поля статора. Движется эта кухня в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора, но это не всегда получается (а лучше сказать — никогда). Ведь уровнять эти моменты можно лишь в случае, если создавать поля одновременно, как в синхронном двигателе.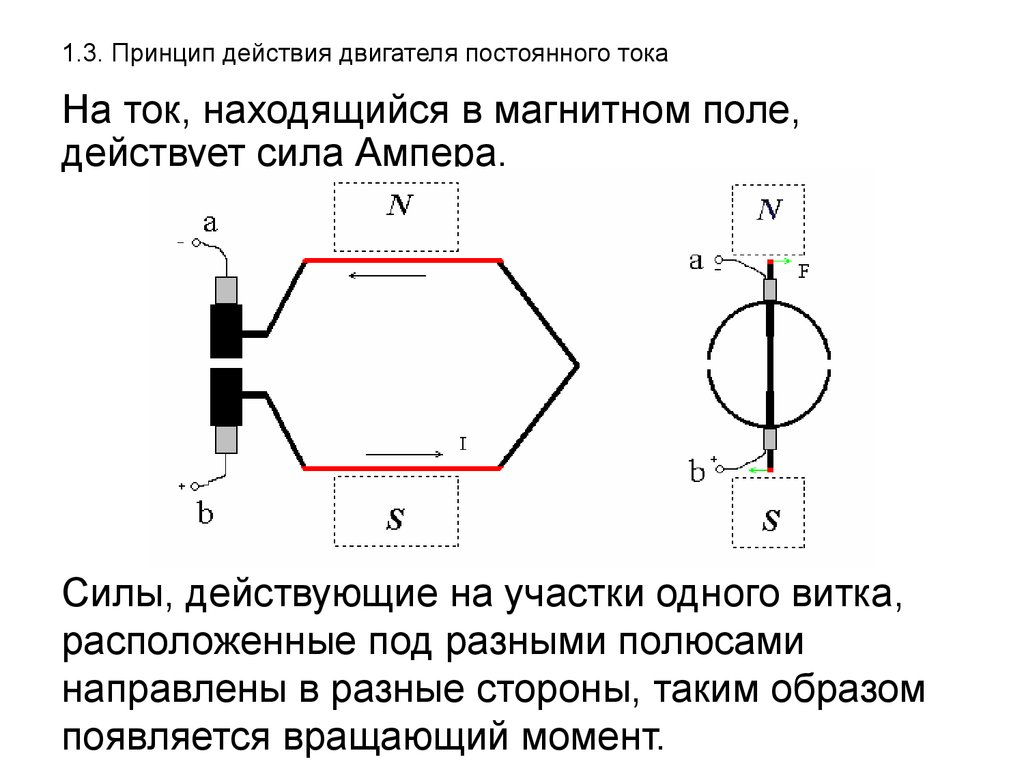 Также влияет механическая нагрузка, которая подключена к валу ротора и мешает догнать поле. Но и в свободном состоянии эти цифры будут различаться. Ведь у любого механизма имеется некоторая инертность, а на время появления поля в замкнутой клетке (т.е. роторе асинхронного двигателя) тоже требуется время.
Также влияет механическая нагрузка, которая подключена к валу ротора и мешает догнать поле. Но и в свободном состоянии эти цифры будут различаться. Ведь у любого механизма имеется некоторая инертность, а на время появления поля в замкнутой клетке (т.е. роторе асинхронного двигателя) тоже требуется время.
Вообщем-то, это основные вещи, которые вам следует уяснить. Всё остальное — это погружение в особенности конструкций конкретных агрегатов.
Поделиться:
✔ Особенности электродвигателя ✔ Статьи компании «Мир Привода»
Электрический двигатель – сложная система, компоненты которой способны перерабатывать электрическую энергию, преобразовывая ее в механическую. Она требуется для активации всевозможных механизмов. Электрический двигатель – ведущий компонент электропривода. В зависимости от режима функционирования электродвигатель может выполнять преобразование энергии в обратном направлении, то есть преобразовывать механическую энергию в электрическую – в этом случае он работает как электрогенератор.
Устройства отличаются по разным параметрами, включая тип механического движения, которое формируют. По этим характеристикам они могут быть вращающимися, линейными и другими. Под понятием электрического двигателя зачастую подразумевается вращающаяся система, которая пользуется сегодня повышенным спросом.
Как работает электродвигатель
В принцип функционирования заложена электромагнитная индукция. Это механизм образования электрополя или тока, что происходит ввиду воздействия колеблющегося магнитного поля. Любое электрическое поле, склонно к изменениям, формирует магнитное – взаимодействие этих двух факторов способствует отталкиванию или притягиванию компонентов статора и ротора.
Из чего состоит агрегат
Электродвигатель вращающегося типа состоит из двух основных частей:
статора и ротора. Первый относится к статичным компонентам, второй – к вращающимся. Также в конструкции предусмотрен якорь. Это обмотка, которая является проводником тока при функционировании мотора. Якорь бывает статичным или активным. Зачастую таким наименованием характеризуются подвижный элемент в различных приборах, вырабатывающих электромагнитное поле.
Якорь бывает статичным или активным. Зачастую таким наименованием характеризуются подвижный элемент в различных приборах, вырабатывающих электромагнитное поле.
Какие электродвигатели сегодня наиболее актуальны
Существуют разные вариации электрических двигателей, но наиболее востребованными считаются асинхронные и модели постоянного тока
Асинхронные
Отличаются относительно низкой ценой по сравнению с конкурентами. Обладают простой конструкцией. И эти два фактора делают изделие широко востребованным в разных сферах. Особенность конструкций заключается в таком параметре, как скольжение. Он предполагает разницу между частотой вращения магнитного поля статичного элемента и скорости движения ротора. Напряжение на динамичном компоненте машины индуцируется благодаря переменному магнитному полю обмоток статора. Вращение продуцирует взаимодействие электромагнитов неподвижного элемента и магнитного поля ротора, которое образуется ввиду сформированных в нем вихревых токов. По типам обмоток статора бывают двигатели:
По типам обмоток статора бывают двигатели:
- Однофазные – агрегаты могут работать только при наличии внешнего фазосдвигающего компонента, например, конденсатора или индуктивного прибора. Эти двигатели отличаются незначительной мощностью.
- С двумя фазами – машины, которые оснащаются двумя обмотками со смещенными по отношению друг к другу фазами. Модели часто встречаются в бытовой технике, а также в оборудовании, которое не требует мощного электродвигателя.
- С тремя и более фазами – многофазные электрические машины, оснащенные тремя+ обмотками статора, смещенными на определенный угол.
Обмотка ротора электродвигателей первого вида – это стержни, которые лишены изоляции, и изготовлены из сочетания меди и алюминия. Они замкнуты с двух сторон кольцами. Такие электродвигатели обладают внушительным набором сильных сторон:
- Упрощенная система пуска. Также оборудование допускает подключение к электросети посредством устройств коммутации.

- Допустимы короткие нагрузки среднего уровня.
- Могут входить в конструкцию оборудования, эксплуатация которого требует высокой мощности. Моторы этого вида не включают в состав скользящих контактов, которые могут минимизировать мощность.
- Несложное техническое обслуживание и ремонтные работы. Это обусловлено тем, что специалисту не потребуется много времени на разборку простой конструкции.
- Невысокая стоимость – модели стоят значительно дешевле синхронных аналогов.
Среди недостатков асинхронных машин можно отметить:
- Невысокая предельная мощность.
- Сложно реализовать возможность корректировки количества вращений за определённую единицу времени.
- Требует высоких стартовых токов при прямом запуске.
Электродвигатели постоянного тока
Еще один вариант часто используемых электрических машин, которые активно применяются в электрическом транспорте, промышленных аппаратах, в исполнительных механизмах.
Моторы постоянного тока имеют много преимуществ:
- Доступна корректировка частоты вращения посредством изменения уровня напряжения в обмотке. Крутящий момент двигателя постоянного тока остается на едином уровне.
- Большой коэффициент полезного действия – этот параметр в ДПТ несколько выше, чем у самых продвинутых асинхронных моделей. При средней нагрузке на валу коэффициент полезного действия возрастает примерно на десять или пятнадцать процентов.
- Относительно компактные размеры, что позволяет использовать ДПТ в качестве микроприводов для различных механизмов.
- Простое управление. Для старта, реверса, корректировки скорости нет необходимости в покупке сложного и дорогостоящего оборудования, в наличии множества устройств коммутации.
- Способен преобразовывать механическую энергию в электрическую – работать в качестве генератора. Двигатели такого плана подходят в качестве стабильных источников постоянного электричества.
- Пусковой момент, позволяющий использовать машину в сочетании с кранами, тяговыми механизмами, конструкциями, предназначенными для подъема грузов.
Двигатели постоянного тока оборудуются:
- Постоянными магнитами – модели одеты в компактные корпуса, и зачастую применяются как микроприводы;
- Электромагнитным возбуждением – наиболее популярное решение, которое используется в бытовой технике, всевозможном оборудовании.
Электрические моторы с электромагнитным возбуждением различаются по типу обмотки статора:
- С параллельным возбуждением – якорь и статор в этом случае подключены параллельно по отношению друг к другу. Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.
- С последовательно подключаемой обмоткой статора.
 Двигатели этой разновидности обладают высоким пусковым моментом. Они актуальны для транспорта, двигающегося от электричества, в промышленных машинах, где есть нужда в пуске под значительной нагрузкой.
Двигатели этой разновидности обладают высоким пусковым моментом. Они актуальны для транспорта, двигающегося от электричества, в промышленных машинах, где есть нужда в пуске под значительной нагрузкой. - Смешанное возбуждение. Элемент возбуждения в таких машинах состоит из двух частей. Первая подключена параллельно, вторая – последовательно якорю. Двигатели этой разновидности нужны для функционирования оборудования, требующего высокого пускового момента.
Методы управления электрическими двигателями на практике
Управление электрическими машинами предполагает возможность коррекции таких характеристик, как скорость и мощность. К примеру, если на асинхронную машину подать напряжение определенного параметра, она будет продуцировать вращения с номинальной мощность – выйти за эти пределы оборудование не способно. При необходимости снизить или увеличить скорость вращения применяются преобразователи частот. Они призваны сформировать требуемый ритм разгона и остановки, что позволяет быстро и беспроблемно корректировать частоту функционирования агрегата.
Чтобы создать нужный разгон и торможение без вмешательства в частоту к работе привлекают устройства плавного пуска. При необходимости в управлении исключительно сценарием старта агрегата внедряют систему «звезда-треугольник». Для активации мотора без устройства плавного пуска актуальны специальные контакторы – с их помощью пуском, тормозом и другими параметры управляют на расстоянии, то есть дистанционно.
Прозвон и сопротивление
Асинхронное оборудование зачастую оснащено 3 обмотками. Каждая из них имеет 2 вывода – их помечают в клеммной коробке. Если выводы доступны, их можно прозвонить с целью получения параметра сопротивления и его сравнения с величинами, снятыми с остальных обмоток. Если величины сопротивления отличаются на один процент и менее, то с высокой вероятностью проблем в работе не имеется.
Для вычисления сопротивления обмоток применяется такой прибор, как омметр. Также следует знать, чем выше мощность агрегата, тем меньше показатель сопротивления обмоток.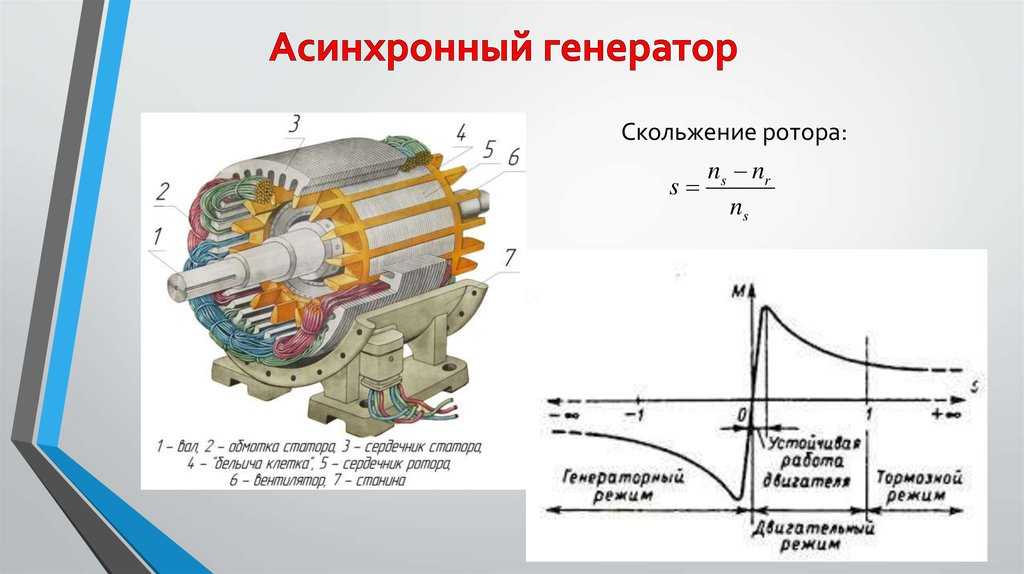
Вычисление мощности электрического двигателя
Самый простой метод, который может помочь в определении номинальной мощности двигателя – шильдик. На детали прописана механическая мощность – ее значение зачастую ниже той, которая потребляется, что обусловлено потерями на нагреве и трении. Но если шильдик на системе отсутствует, можно использовать визуальный инструмент – оценка по размерам оборудования. Если мотор оснащен валом большого диаметра, его мощность будет достаточно высокой и наоборот.
Также параметр мощности вычисляется по нагрузке и настройкам, выставленным на защитных приборах, которые подают питание на агрегат. Еще один вариант – старт двигателя на номинальной мощности, что даст валу нагрузку. После этого следует измерить ток специальными клещами. Показатель должен быть идентичен по всем обмоткам. Для определения примерной мощности асинхронной машины, которая подключена по алгоритму «звезда», номинальный ток делят на двое.
Увеличение и уменьшение оборотов
Такая функция, как корректировка скорости вращения требуется в следующих режимах функционирования:
- старт;
- остановка;
- работа.

Для этого лучше всего прибегнуть к специальному прибору – частотному преобразователю. Корректировка настроек позволяет достичь различной частоты вращения – она зависит от технических параметров электродвигателя. При этом доступно управление другими настройками оборудования, анализ его состояния во время активности. Можно изменять показатель частоты в плавном и ступенчатом режиме.
Управление оборотами на старте и при установке выполняется посредством устройства плавного пуска. Этот прибор уменьшает пусковой ток благодаря медленному разгону и постепенному повышению оборотов.
Особенности вычисления тока и мощности прибора
Если ток асинхронного устройства известен (узнать можно по шильдику или с помощью изменений в номинальном режиме), но при этом мощность остается неизвестной. В этом случае следует прибегнуть к формуле: Р = I (1,73·U·cosφ·η):
- P – полезная мощность в номинальном состоянии в Ваттах (этот параметр производители зачастую указывают на шильдике).

- I – показатель тока агрегата.
- U – напряжение питания обмоток.
- Cosφ – коэффициент мощности.
- η – КПД.
Если мощность известна, и требуется узнать ток, используют формулу: I = P/(1,73·U·cosφ·η).
Для оборудования с мощность более 1.5 кВт, с подключением типа «звезда» используют правило – для примерного расчёта показателя тока его мощность умножают на два.
Настройка мощности: увеличение
Мощность, которую производитель дублирует на шильдике мотора, зачастую ограничена допустимым током, то есть – нагревом корпуса. При повышении показателя требуется предпринять ряд действий, которые направлены на нормализацию температуры корпуса привода двигателя. Например, выполнив установку самостоятельного вентилятора.
При применении преобразователя частоты для увеличения мощности частоту можно изменить посредством ШИМ, но при этом не стоит допускать чрезмерного нагревания преобразователя частоты. Параметр также можно изменить с помощью редуктора или ременной передачи, однако число оборотов при этом уменьшится.
Если вышеперечисленные рекомендации не позволяют справиться с поставленной задачей, остается единственный выход из ситуации – заменить маломощный движок на более производительный.
Потеря мощности при подключении 3-фазного двигателя к 1-фазной сети
Такой формат подключения предполагает использование пускового и рабочего конденсатора для сдвига фазы. Номинальная мощность на валу в этом случает останется неизвестной, а потеря составит около тридцати процентов от номинала. Это обусловлено отсутствием возможности сформировывать перекос по фазам при колебании нагрузок.
Исполнения двигателей
Электрические двигатели отличаются методом установки, степенью защиты, по климатическому предназначению. Асинхронные модели устанавливаются одним из двух методов:
- на лапах;
- посредством фланца.
Двигатели, отличающиеся по климатическому исполнению, применяются в разных условиях. Это может быть умеренный климат, преимущественно низкая температура или средняя, жаркое время года.
Производители присваивают продукции определенный класс защиты, который чаще всего характеризует степень защищенности от пыли, воды. Зачастую в продаже представлены приводы с сертификацией IP 55.
Для чего двигателю нужен тормоз
В некоторых видах оборудования, например, в лифтах, грузоподъемных устройствах, при торможении мотора нужна фиксация вала в статичном положении. Для этого используется электромагнитный тормоз, включённый в состав агрегата – он прикреплен к тыльной части. Управление этим компонентом выполняется посредством частотного преобразователях или микросхемы.
Как двигатель обозначается на электрических схемах
Электрический двигатель отображается на схемах посредством буквы «M», которая очерчена кругом. Также схемы могут включать порядковый номер продукта, число фаз, разновидность тока, метод подключения обмоток, показатель мощности.
Причины перегрева двигателя
Двигатель – активное оборудование, которое может перегреваться, а причинами этому являются:
- естественный износ подшипников, что создает более активное трение между деталями и провоцирует перегрев;
- высокая нагрузка в области вала;
- некорректное напряжение;
- пропадание фазы;
- короткое замыкание, произошедшее в обмотке;
- отсутствие нормального охлаждения.
Нагрев электродвигателя в негативном ключе отражается на его долговечности и коэффициенте полезного действия. Также высокая температура может со временем спровоцировать износ привода. В этом случае может потребоваться сложный и дорогостоящий ремонт или полная замена агрегата.
Частые неисправности электродвигателей
Отмечают два типа поломок, к которым склонны большинство моделей электрических двигателей. Они могут носить механический и электрический характер.
Электрические неисправности
Предполагают проблемы в обмотке:
- замыкание между витками;
- замыкание обмотки на корпус;
- механическое повреждение обмотки.

Механические неисправности
Предполагают:
- естественный износ в подшипниках, повешенное трение;
- прокручивание ротора на валу;
- износ корпуса мотора;
- поломка, связанная с повреждением крыльчатки обдува
Чтобы не допускать проблемных ситуаций, пользователю следует позаботиться о своевременной замене подшипников. Важно учитывать их износ, срок эксплуатации мотора. Это же относится к другим деталям. Электрические неисправности требуют только профессионального ремонта, ведь неаккуратное действие со стороны пользователя может потребовать замены всего агрегата.
Как применяются электрические двигатели
На сегодня электродвигатели – основные потребители энергии. Около 50% этого ресурса приходится на различные варианты оборудования. Двигатели широко востребованы во многих сферах промышленности и жизни в целом. Они применяются для работы бытовой техники, производственного оборудования, для транспорта, спецтехники.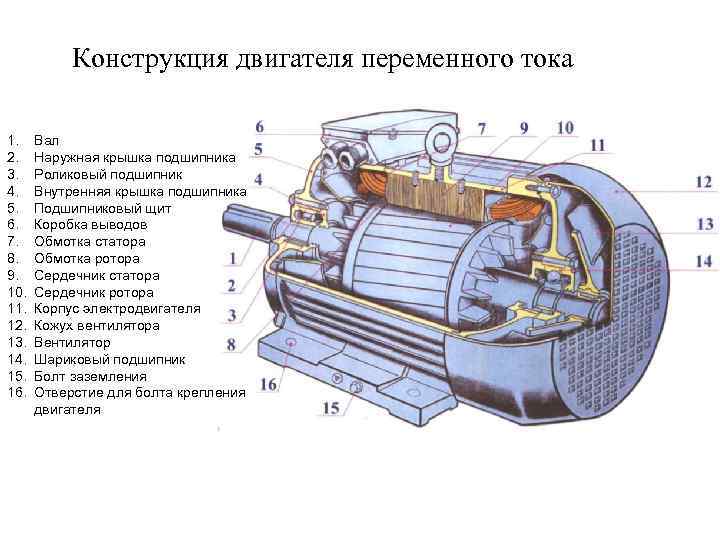
Основные направления, в которых используется это оборудование:
- металлообрабатывающие и шлифовальные предприятия;
- деревообрабатывающие заводы, конвейерное производство;
- для изготовления компрессионного, климатического оборудования;
- в строительной сфере – моторы включены в конструкции спецтехники и оборудования для подъёма, опускания строительного оборудования;
- в системах лифтов, в отопительном оборудовании, в системах вентиляции;
- в бытовых устройствах, начиная холодильником, заканчивая уборочной техникой;
- для персональных компьютеров, ноутбуков.
Преимущества электрических двигателей
Это оборудование имеет множество сильных сторон, которые обеспечивают его востребованность:
- относительно простые конструкции;
- простая установка и эксплуатация;
- пригодность к ремонту – благодаря высококачественным компонентам, которые используют производители, современные двигатели способны стабильно работать годами;
- в продаже доступен солидный выбор устройств, отличающихся мощностью и другими техническими характеристиками.
 Благодаря этому найти вариант под определенное оборудование не составит труда;
Благодаря этому найти вариант под определенное оборудование не составит труда; - доступность опции регулировки скорости вращения вала мотора;
- высокая скорость функционирования, готовность к запуску и остановке;
- автоматическое управление оборудованием, доступное в большинстве случаев;
- функция реверса;
- для установки и технического обслуживания со стороны пользователя не потребуется крупных финансовых вложений;
- длительный эксплуатационный период;
- высокий коэффициент полезного действия;
- оборудование изготавливается из экологически безопасных материалов и компонентов. Работа двигателя не предполагает негативное влияние на здоровье пользователей и состояние природы.
Но к главному достоинству электрического привода можно отнести возможность его контроля и регулировки, при этом местоположение оборудования не имеет принципиального значения – можно включать и отключать устройство на расстоянии.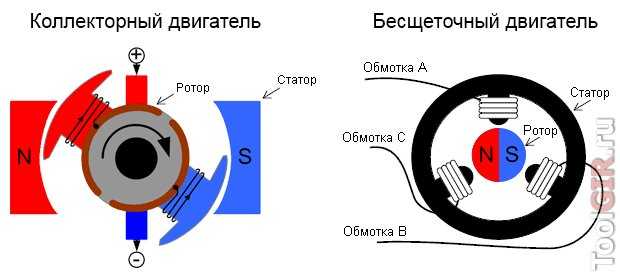 Эклектический мотор не продуцирует неприятного шума, не способен нанести вреда здоровью человека в отличие от механических аналогов.
Эклектический мотор не продуцирует неприятного шума, не способен нанести вреда здоровью человека в отличие от механических аналогов.
Что такое электродвигатели и как они работают?
Электромеханический механизм, преобразующий электрическую энергию в механическую, известен как электродвигатель. Двигатель, другими словами, представляет собой устройство, создающее вращающую силу. Взаимодействие магнитных и электрических полей имеет решающее значение для работы электродвигателя, особенно в беспроводных устройствах, таких как аккумуляторные дрели.
Эволюция электродвигателей
Майкл Фарадей, британский физик, считается одним из самых значительных из многочисленных 19ученые 19-го века, внесшие свой вклад в открытие и разработку электродвигателей. Фарадей добился успешного вращения провода с помощью магнита и магнитного поля, создаваемого электрическим током в 1821 году. В 1831 году он разработал закон магнитной индукции, проложивший путь к значительным достижениям в области электродвигателей и генераторов.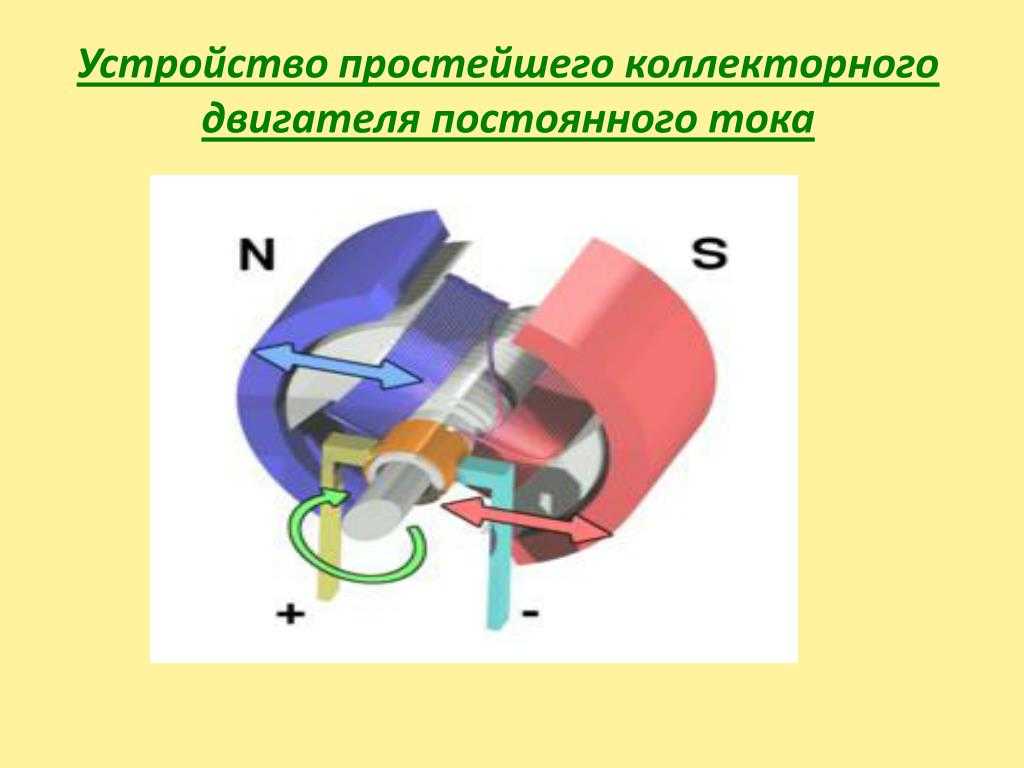
📌 Со временем было разработано множество дополнительных форм электродвигателей, а также архитектур, которые можно назвать классическими двигателями постоянного тока.
После этого практичный электродвигатель был найден, а не изобретен в 1872 году, когда один из генераторов, выставленных на Всемирной выставке в Вене, начал вращаться сам по себе после того, как был непреднамеренно соединен с другим генератором. Это привело к осознанию того, что те же принципы, что и для генераторов, можно применить и к двигателям. Генераторы стали основой многих секторов в двадцатом веке в результате быстрого роста их практического применения.
Схема электродвигателяГенераторы и двигатели
Генераторы преобразуют механическую энергию обратно в электрическую, тогда как электродвигатели преобразуют электрическую энергию во вращение и различные виды механической энергии.
Несмотря на противоположные задачи, двигатели и генераторы имеют много общего с точки зрения конструкции и функционирования. По правде говоря, все, что требуется, — это простой эксперимент с двумя моделями двигателей, соединенными вместе, чтобы показать, что электрический двигатель может также работать как генератор.
По правде говоря, все, что требуется, — это простой эксперимент с двумя моделями двигателей, соединенными вместе, чтобы показать, что электрический двигатель может также работать как генератор.
Эти два типа машин традиционно разрабатывались независимо друг от друга из-за различных способов их использования.
Как работают электродвигатели
Электродвигатели генерируют механическую силу вращения в якоре, расположенном на роторе или статоре, вокруг вала, используя электрический ток для создания вращающихся магнитных полей. Чтобы превратить электрическую энергию в интенсивные всплески силы и создать динамические степени скорости или мощности, многочисленные конструкции двигателей используют одну и ту же основную предпосылку.
Компоненты двигателя
Хотя электродвигатели различаются по форме и типу, многие из них состоят из следующих частей и узлов (начиная с центра и идя наружу):
✅ Обмотки
✅ Центральный вал двигателя
✅ Шариковые и роликовые подшипники (для уменьшения трения и износа)
✅ Щетки (в двигателях постоянного тока)
✅ Клеммы (размещаются на роторе, вращающейся части или статоре, неподвижном компоненте) )
✅ Промышленное применение электродвигателей
✅ Рама и торцевые щиты
Электродвигатели широко используются в промышленности. Ниже приведены примеры общего промышленного применения:
Ниже приведены примеры общего промышленного применения:
✅ Машины для тяжелых условий эксплуатации
✅ Системы ОВКВ
✅ Дробилки
✅ Насосы
✅ Токарные станки
✅ Компрессоры
✅ Вентиляторы и воздуходувки
Электродвигатели различных типов
Электродвигатели имеют различные характеристики и безопасность, но они имеют различные рабочие характеристики. можно разделить на два типа: переменный ток (AC) и постоянный ток (DC).
Несмотря на то, что источник питания является наиболее заметным различием между двумя типами двигателей, каждый из них имеет свой собственный набор функций и областей применения. Двигатели переменного тока способны управлять более сложным и хрупким оборудованием, тогда как двигатели постоянного тока обычно используются для питания более крупного оборудования, требующего меньшего обслуживания и контроля. Поскольку двигатели переменного тока могут создавать больший крутящий момент, многие представители отрасли считают их более мощными, чем двигатели постоянного тока.
Двигатель переменного тока
Двигатель переменного тока преобразует переменный ток в механическую энергию. Асинхронные двигатели, синхронные двигатели и линейные двигатели представляют собой три типа двигателей. Двигатели переменного тока чаще всего используются в бизнесе, поскольку они обладают различными преимуществами:
- Они просты в конструкции
- Они более экономичны из-за меньшего пускового энергопотребления
- Они также более прочные и, как правило, имеют более длительный срок службы
- Требуют минимального обслуживания
- Они просты в изготовлении
Однофазные и трехфазные двигатели переменного тока представляют собой два типа двигателей переменного тока:
Однофазные двигатели имеют следующие характеристики:
- определяется электрической мощностью (в кВт).
- Количество полюсов определяет скорость вращения
- Способ крепления: фланец (B14, B5) или кронштейны (B3)
- Компетентность
- Поскольку они менее прочные, они менее промышленны
- Могут быть подключены к бытовой электросети
Трехфазные двигатели имеют следующие характеристики:
- Конструкция, способная передавать значительно больше электроэнергии, чем однофазный двигатель
- Их применение в промышленных условиях (около 80 процентов)
- Их применение в инфраструктуре и оборудовании, требующем большого количества электроэнергии
Двигатель постоянного тока
Двигатель постоянного тока представляет собой механизм, преобразующий электрическую энергию постоянного тока в механическую.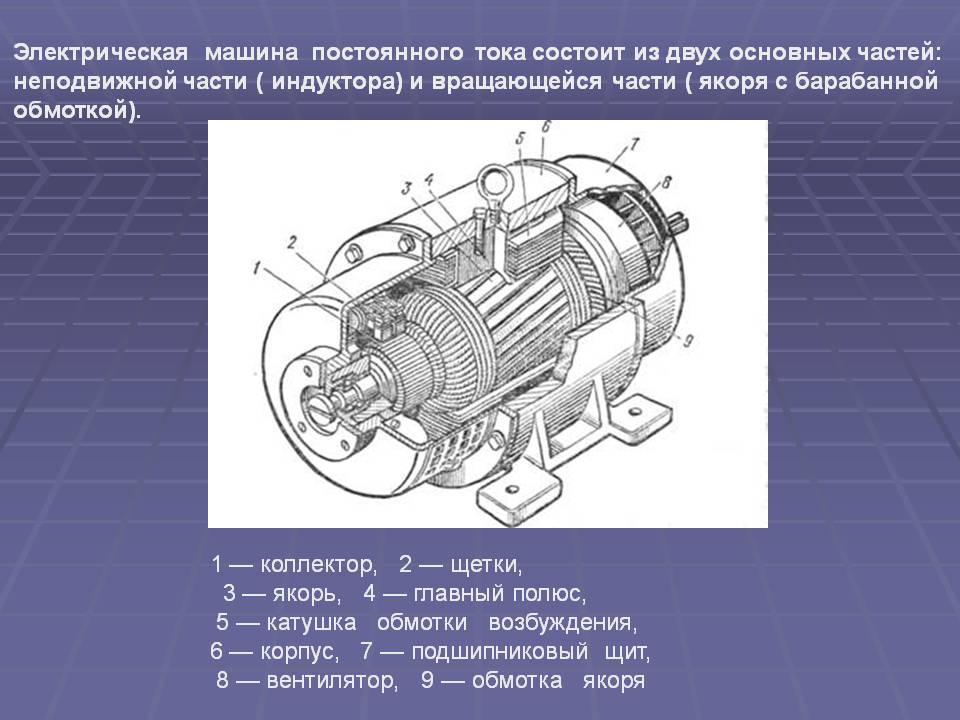 Его действие основано на основной идее, что когда проводник с током помещается в магнитное поле, к нему прикладывается сила и создается крутящий момент. Двигатели постоянного тока также широко распространены в промышленных условиях, поскольку, в зависимости от формата (см. вопрос о бесщеточных двигателях), они предлагают значительные преимущества:
Его действие основано на основной идее, что когда проводник с током помещается в магнитное поле, к нему прикладывается сила и создается крутящий момент. Двигатели постоянного тока также широко распространены в промышленных условиях, поскольку, в зависимости от формата (см. вопрос о бесщеточных двигателях), они предлагают значительные преимущества:
🔸 Они точные и быстрые
🔸 Их скорость регулируется изменением напряжения питания
🔸 Они просты в установке, даже в мобильных (аккумуляторных) системах
🔸 Большой пусковой момент
🔸 Они быстро запускаются, останавливаются, ускоряются и реверсируют
Преимущества двигателей переменного тока по сравнению с двигателями постоянного тока
Каждый тип двигателя имеет свой собственный набор преимуществ, которые делают его идеальным для различных коммерческих и промышленных приложений. Например, двигатели переменного тока универсальны и просты в использовании. Ниже приведены некоторые из их дополнительных преимуществ:
- Низкие начальные требования к мощности, которые защищают приемные конечные компоненты
- Контролируемые начальные уровни тока и ускорения
- Дополнения VFD или VSD, которые могут регулировать скорость и крутящий момент на различных этапах использования
- Увеличенная надежность и срок службы возможности настройки фазы
Двигатели постоянного тока имеют ряд преимуществ, в том числе:
• Упрощение установки и обслуживания.
• Высокая начальная мощность и крутящий момент
• Быстрый пуск, остановка и время реакции на ускорение
• Доступны различные стандартные напряжения
Что мощнее, двигатель переменного или постоянного тока?
Двигатели переменного тока обычно считаются более мощными, чем двигатели постоянного тока, поскольку они могут создавать больший крутящий момент при более высоком токе. С другой стороны, двигатели постоянного тока более эффективны и лучше используют входную энергию. Двигатели переменного и постоянного тока доступны в различных размерах и мощностях, чтобы удовлетворить требования к мощности любого бизнеса.
Щёточный двигатель против бесщёточного двигателяБесщёточный двигатель против щёточного двигателя постоянного тока:
Коллекторный двигатель и бесщёточный двигатель — это два наиболее распространенных типа двигателей постоянного тока (или двигателей BLDC). Коллекторные двигатели постоянного тока, как следует из их названий, имеют щетки, которые используются для коммутации двигателя и его вращения. Электронное управление заменяет функцию механической коммутации в бесколлекторных двигателях. Коллекторный или бесщеточный двигатель постоянного тока может использоваться во многих приложениях. Они работают по тем же принципам, что и катушки и постоянные магниты с точки зрения притяжения и отталкивания. Оба имеют преимущества и недостатки, которые могут привести к тому, что вы предпочтете один из них другому, в зависимости от потребностей вашего приложения.
Электронное управление заменяет функцию механической коммутации в бесколлекторных двигателях. Коллекторный или бесщеточный двигатель постоянного тока может использоваться во многих приложениях. Они работают по тем же принципам, что и катушки и постоянные магниты с точки зрения притяжения и отталкивания. Оба имеют преимущества и недостатки, которые могут привести к тому, что вы предпочтете один из них другому, в зависимости от потребностей вашего приложения.
Коллекторный электродвигатель
Угольная щетка может быть любой из следующих: Она состоит из одного или нескольких атомов углерода. Включены один или несколько шунтов и клемм.
📌 Кисти изготовлены из пяти различных семейств кистей. Каждый из них адаптирован к конкретным потребностям и имеет свой собственный метод производства.
Любой специалист по управлению движением должен уметь различать коллекторные и бесщеточные двигатели постоянного тока. Раньше щеточные двигатели были довольно распространены.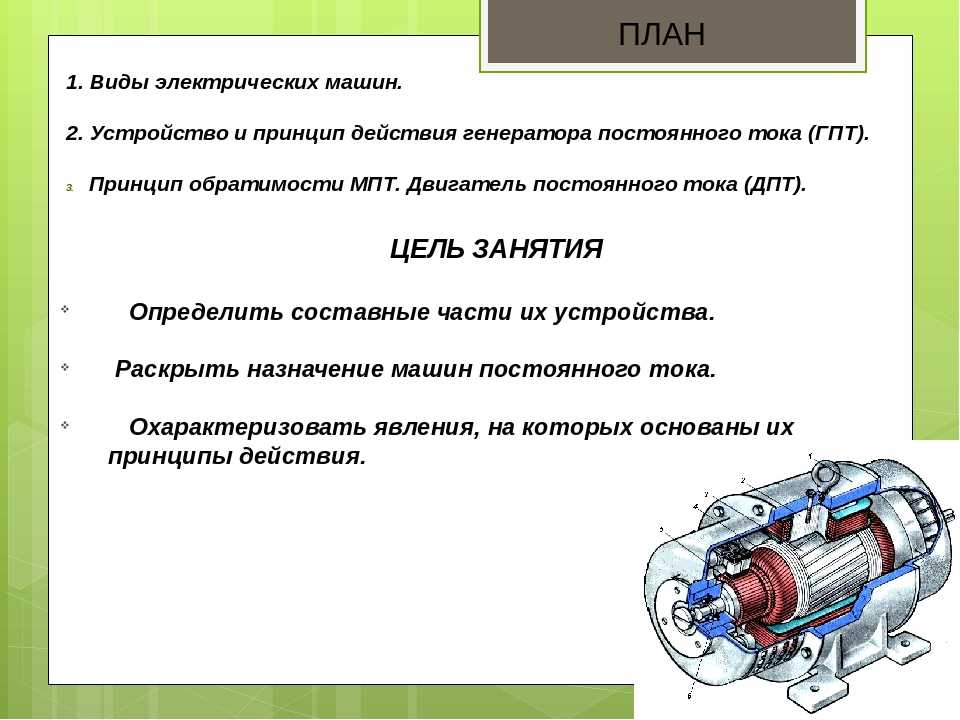 Хотя бесщеточные двигатели постоянного тока полностью заменили их, правильный двигатель постоянного тока любого типа может значительно повысить эффективность проекта.
Хотя бесщеточные двигатели постоянного тока полностью заменили их, правильный двигатель постоянного тока любого типа может значительно повысить эффективность проекта.
✅ Ниже перечислены основные компоненты коллекторного двигателя постоянного тока:
- Статор — корпус с постоянными магнитами.
- Якорь представляет собой ротор с установленным на нем рядом электромагнитов. Внутри статора он вращается свободно.
- Коллектор — металлическое кольцо, прикрепленное к валу якоря, называется коллектором.
- Щетки — для обеспечения подачи электричества к обмоткам якоря угольные пластины остаются в контакте с коллектором.
✅ Преимущества коллекторного двигателя постоянного тока
- Общие расходы на строительство низкие.
- Восстановление — распространенный способ продлить срок службы изделия.
- Простой и недорогой контроллер
- Для фиксированной скорости контроллер не требуется.
- Идеален для использования в суровых условиях эксплуатации
✅ Недостатки щеточного двигателя постоянного тока
- Менее эффективен
- Электрические шумы: коммутационные движения коммутаторов вызывают сильный электрический и электромагнитный шум из-за постоянного создания и разрыва индуктивных соединений.
 .
. - Срок службы: Щетки и коллекторы изнашиваются из-за постоянного прямого контакта с валом.
Использование коллекторных двигателей постоянного тока
В бытовых товарах и автомобилях по-прежнему широко используются коллекторные двигатели постоянного тока. Они также имеют большое промышленное значение из-за возможности изменять отношение крутящего момента к скорости, что возможно только с щеточными двигателями.
Бесщеточный электродвигатель
Современные бесщеточные двигатели преодолевают многие недостатки щеточных двигателей за счет сочетания более высокой выходной мощности, меньшего размера и веса, улучшенного рассеивания тепла и эффективности, более широкого диапазона рабочих скоростей и чрезвычайно низкого электрического шума. Бесщеточные двигатели не имеют электрических соединений, которые могут изнашиваться, что обеспечивает большую надежность и более короткие интервалы технического обслуживания в коммерческих и промышленных приложениях.
Бесщеточные двигатели постоянного тока Преимущества:
По сравнению с щеточными двигателями бесщеточные двигатели имеют ряд преимуществ:
- Бесщеточные двигатели постоянного тока обладают хорошими линейными диапазон скоростей;
- Отличные характеристики крутящего момента, хорошие характеристики крутящего момента на средних и низких скоростях, большой начальный крутящий момент и низкий пусковой ток; высокая перегрузочная способность
- Плавный пуск и остановка, хорошие характеристики торможения; оригинальный механический или электромагнитный тормозной механизм может быть сохранен
- Бесщеточные двигатели постоянного тока не имеют потерь возбуждения по сравнению с двигателями переменного тока, а также потерь на трение щеток и искрообразования по сравнению с двигателями постоянного тока с щетками.
- Высокая надежность, стабильность, гибкость и простота обслуживания
- Компактные размеры, малый вес и высокая производительность
- Ударопрочность и виброустойчивость, низкий уровень шума, низкий уровень вибрации, плавная работа, долгий срок службы
Бесщеточный двигатель Недостатки
При многих достоинствах бесколлекторных двигателей у них есть и ряд недостатков:
- Стоимость: Бесщеточные двигатели имеют ряд недостатков, все из которых связаны с их повышенной сложностью конструкции.
 Для правильной последовательности заряда катушек статора BLDC требуется контроллер переключения. Это увеличивает стоимость производства, что отражается на более высокой стартовой стоимости.
Для правильной последовательности заряда катушек статора BLDC требуется контроллер переключения. Это увеличивает стоимость производства, что отражается на более высокой стартовой стоимости. - Усложнение: Добавление сложности увеличивает риск сбоя. Нам не удалось найти ни одного исследования, в котором бы сравнивалась частота отказов щеточных и бесщеточных электроинструментов, хотя часто предполагается, что более сложное оборудование выходит из строя с большей вероятностью.
Электродвигатель с постоянной скоростью
Существует несколько различных типов двигателей с постоянной скоростью. Выбирая из большого ассортимента продуктов, помните о применении, требуемых функциях, производительности и т. д. Процесс выбора двигателя и редуктора должен начинаться с тщательного изучения технических характеристик двигателя, чтобы убедиться, что выбранный вами двигатель соответствует требованиям применения. Что вам нужно, чтобы начать свой выбор, так это некоторая фактическая и полезная информация о двигателях. Электродвигатель с постоянной скоростью сочетает в себе асинхронный двигатель с включенной муфтой и тормозом. Он идеально подходит для частых операций запуска и остановки. Подходит для ситуаций, когда двигатель работает на синхронной скорости независимо от момента нагрузки, и двигатель часто запускается, останавливается и реверсируется.
Электродвигатель с постоянной скоростью сочетает в себе асинхронный двигатель с включенной муфтой и тормозом. Он идеально подходит для частых операций запуска и остановки. Подходит для ситуаций, когда двигатель работает на синхронной скорости независимо от момента нагрузки, и двигатель часто запускается, останавливается и реверсируется.
Двухскоростные двигатели
Двухскоростные двигатели являются экономичным выбором для приложений, требующих только двух скоростей, а также снижают вероятность отказа. Эти двигатели часто имеют рабочую скорость и более низкую скорость для облегчения запуска. Без преобразователя частоты двухскоростные двигатели могут вращать вентиляторы, насосы, подъемники и другое оборудование с двумя разными скоростями.
В чем разница между инструментами с постоянной и двойной скоростью?
- Одним из основных отличий является конструкция редуктора. Инструменты с постоянной скоростью обеспечивают максимальную скорость и мощность, но инструменты с двойной скоростью можно настроить для двух режимов: быстрого и медленного.

- Работа с двухскоростным инструментом более эффективна. Наоборот, инструмент с постоянной скоростью обеспечивает большую мощность и очень удобен для проектов, требующих больших усилий.
- Инструмент с двумя скоростями можно использовать для различных видов работ, но устройство с постоянной скоростью предназначено для особых целей. Например, двухскоростная дрель используется для сверления, сверления с ударом и накрутки. А вот обычная дрель годится только для сверлильных работ.
- Универсальность односкоростных инструментов намного меньше, чем у двухскоростных, даже при одинаковой мощности.
Что такое скорость вращения (об/мин)?
Скорость вращения двигателей (об/мин) , в терминах электродвигателя, представляет собой число оборотов инструмента в единицу времени и измеряется в оборотах в минуту (об/мин). Фактически, об/мин — это единица измерения, используемая для отображения скорости или частоты электроинструмента без нагрузки.
📌 Скорость поворота считается важным фактором в зависимости от вида работ, которые мы собираемся выполнять. Поэтому, когда мы используем электрическую машину для работы на твердых поверхностях, таких как бетон, мы заинтересованы в выборе большего количества оборотов в минуту.
Эта скорость также напрямую связана с типом инструмента, который мы используем. Например, аккумуляторные дрели обычно обеспечивают максимальную скорость около 2000 об/мин, в то время как большинство сетевых дрелей обычно работают со скоростью 3000 об/мин.
Что такое крутящий момент электроинструмента?
Сила, заставляющая объект вращаться, измеряется в ньютон-метрах (Нм) и является лучшим показателем того, насколько мощна ваша дрель или ударный инструмент. Чем больше цифра в ньютон-метрах, тем большую силу кручения она даст.
Традиционный метод измерения крутящего момента: 1. Сверление на станке
2. Закрепление патрона на стационарном шпинделе
3. Дрель полностью готова к работе.
Дрель полностью готова к работе.
4. Крутящий момент сверла измеряется при 0 оборотах в минуту (скорость не измеряется)
, Дрель полностью в рабочем состоянии.
4. Крутящие нагрузки становятся все более распространенными.
5. Для расчета скорости сверления и крутящего момента используются несколько точек данных.
Настройки крутящего момента для электроинструмента
При заворачивании шурупов в более прочные материалы вам нужно двигаться медленнее и применять больший крутящий момент. Вы можете регулировать глубину сверления, не причиняя никакого вреда, если вы правильно соблюдаете эти параметры. Чтобы добиться наилучших результатов при сверлении отверстий, чем жестче материал, тем выше скорость.
В чем разница в скорости вращения и крутящем моменте?
Понятие момента затяжки выражает величину вращающего усилия, создаваемого двигателем электроинструмента.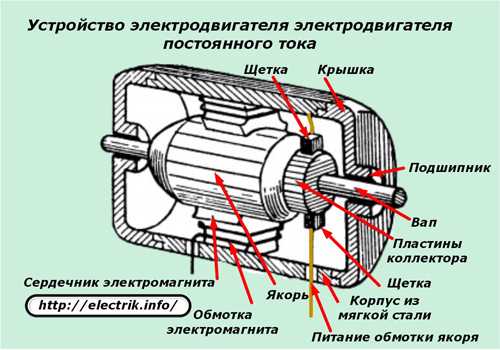 Например, сила вращения отвертки используется для затягивания винтов, гаек или чего-либо подобного. Другими словами, крутящий момент, который измеряется в ньютон-метрах (Нм), представляет собой силу, предназначенную для поворота объекта, и является лучшим показателем для определения практической мощности электроинструмента.
Например, сила вращения отвертки используется для затягивания винтов, гаек или чего-либо подобного. Другими словами, крутящий момент, который измеряется в ньютон-метрах (Нм), представляет собой силу, предназначенную для поворота объекта, и является лучшим показателем для определения практической мощности электроинструмента.
💠 Однако скорость вращения, как понятно из названия, показывает скорость вращения электродвигателя. Например, чем выше число оборотов дрели, тем выше скорость сверла.
Важное замечание: Крутящий момент и скорость вращения не только разные вещи, но и имеют совершенно обратную зависимость. Проще говоря, когда электроинструмент предлагает высокий крутящий момент, он будет иметь низкую скорость вращения, и наоборот.
Часто задаваемые вопросы ❓
Каковы преимущества бесщеточных двигателей постоянного тока (BLDC) по сравнению с коллекторными двигателями постоянного тока?
Бесщеточные двигатели постоянного тока (BLDC двигатели), в которых отсутствуют щетки и коммутаторы с механическими контактами, они малошумны, не требуют особого обслуживания и способны работать на высокой скорости.
Какой материал щеток в двигателе постоянного тока?
Металл, углерод и композиты металл-углерод являются распространенными материалами для щеток. Некоторые металлические щетки используют коллектор для нанесения драгоценных металлов, таких как золото, на контактную поверхность. Материал щетки тщательно выбирается на основе электрического напряжения/тока, а также экономических соображений.
Из каких компонентов состоит базовый двигатель?
Якорь или ротор, коммутатор, щетки, ось, магнит возбуждения и некоторый тип источника питания постоянного тока составляют базовый двигатель.
Каков максимальный срок службы электродвигателя?
При эксплуатации в типичных условиях эксплуатации электродвигатель может прослужить от 15 до 20 лет при испытательных настройках.
Что лучше использовать: электродвигатель постоянного или переменного тока?
Хотя двигатели переменного тока более мощные и требуют меньше обслуживания, двигатели постоянного тока более энергоэффективны. Использование электродвигателя влияет на выбор переменного или постоянного тока.
Использование электродвигателя влияет на выбор переменного или постоянного тока.
Заключение 🧾
Для классификации электродвигателей можно использовать такие факторы, как тип источника питания, внутренняя конструкция, область применения и вид выходного сигнала. Помимо переменного и постоянного тока, двигатели могут быть щеточными или бесщеточными, однофазными, двухфазными или трехфазными, а также с воздушным или жидкостным охлаждением.
Пылесосы, посудомоечные машины, компьютерные принтеры, факсимильные аппараты, видеомагнитофоны, станки, печатные станки, автомобили, системы метро, очистные сооружения и водонасосные станции — все это примеры важности электродвигателей в современной жизни. С другой стороны, новый период предвещает большее внимание к деталям в результате развития, закона и необходимости оставаться конкурентоспособными. В результате системы усложняются, а ресурсы увеличиваются в ответ. Создание экспертной системы, несомненно, является инженерной проблемой, и незначительное увеличение процентной эффективности может помочь проложить путь к оптимизированному/зеленому будущему, к которому мы стремимся. Цель состоит в том, чтобы отрегулировать и разработать конструкции двигателей и алгоритмы управления.
Цель состоит в том, чтобы отрегулировать и разработать конструкции двигателей и алгоритмы управления.
Как работают электродвигатели. Инженерное мышление
Узнайте, как работает электродвигатель, основные части, почему и где они используются, а также рабочие примеры.
Прокрутите вниз, чтобы посмотреть обучающее видео на YouTube
ЭлектродвигательЭто электрический двигатель. Это одно из самых важных устройств, когда-либо изобретенных. Эти двигатели используются повсюду: от перекачки воды, которую мы пьем, до питания лифтов и кранов и даже охлаждения атомных электростанций. Итак, мы собираемся заглянуть внутрь одного и подробно узнать, как именно они работают в этой статье.
Электрический асинхронный двигатель Асинхронный двигатель будет выглядеть примерно так. Они превращают электрическую энергию в механическую, которую мы можем использовать для привода насосов, вентиляторов, компрессоров, шестерен, шкивов и т. д. Почти все детали находятся внутри основного корпуса. Спереди мы находим вал, это та часть, которая вращается, и мы можем подключить к ней такие вещи, как насосы, шестерни и шкивы, чтобы они работали за нас. Сзади мы видим вентилятор и защитную крышку, вентилятор соединен с валом, поэтому он вращается всякий раз, когда работает двигатель. Асинхронный двигатель может выделять много тепла во время работы, поэтому вентилятор обдувает корпус окружающим воздухом, охлаждая его. Если асинхронный двигатель станет слишком горячим, изоляция внутренних электрических катушек расплавится, что вызовет короткое замыкание, и двигатель разрушится. Ребра на боковой стороне корпуса помогают увеличить площадь поверхности, что позволяет отводить больше нежелательного тепла.
Спереди мы находим вал, это та часть, которая вращается, и мы можем подключить к ней такие вещи, как насосы, шестерни и шкивы, чтобы они работали за нас. Сзади мы видим вентилятор и защитную крышку, вентилятор соединен с валом, поэтому он вращается всякий раз, когда работает двигатель. Асинхронный двигатель может выделять много тепла во время работы, поэтому вентилятор обдувает корпус окружающим воздухом, охлаждая его. Если асинхронный двигатель станет слишком горячим, изоляция внутренних электрических катушек расплавится, что вызовет короткое замыкание, и двигатель разрушится. Ребра на боковой стороне корпуса помогают увеличить площадь поверхности, что позволяет отводить больше нежелательного тепла.
Вал поддерживается несколькими подшипниками, установленными внутри переднего и заднего щитов. Подшипники помогают валу вращаться плавно и удерживают его в нужном положении.
Передний щит Внутри корпуса находим статор. Статор неподвижен и не вращается. Он состоит из нескольких медных проводов, намотанных в катушки между пазами, расположенными по внутреннему периметру. Медный провод покрыт специальной эмалью, которая электрически изолирует провода друг от друга, это означает, что электричество должно проходить через всю катушку, иначе оно пойдет по кратчайшему пути — и мы увидим, почему это важно, чуть позже. Эта статья. Это трехфазный асинхронный двигатель, поэтому у нас есть три отдельных набора катушек в статоре. Концы каждого комплекта подключаются к клеммам в электрической клеммной коробке. Мы увидим, как они связаны чуть позже в этой статье. При подключении к электросети статор создает вращающееся электромагнитное поле.
Медный провод покрыт специальной эмалью, которая электрически изолирует провода друг от друга, это означает, что электричество должно проходить через всю катушку, иначе оно пойдет по кратчайшему пути — и мы увидим, почему это важно, чуть позже. Эта статья. Это трехфазный асинхронный двигатель, поэтому у нас есть три отдельных набора катушек в статоре. Концы каждого комплекта подключаются к клеммам в электрической клеммной коробке. Мы увидим, как они связаны чуть позже в этой статье. При подключении к электросети статор создает вращающееся электромагнитное поле.
Ротор соединен с валом. В данном случае это ротор с короткозамкнутым ротором. Она называется беличьей клеткой, потому что у нее есть два концевых кольца, которые соединены стержнями, и они вращаются вместе. Эта конструкция похожа на маленькую клетку или колесо для упражнений, которое используют домашний хомяк или даже белка.
Беличья клетка Беличья клетка оснащена несколькими ламинированными стальными листами.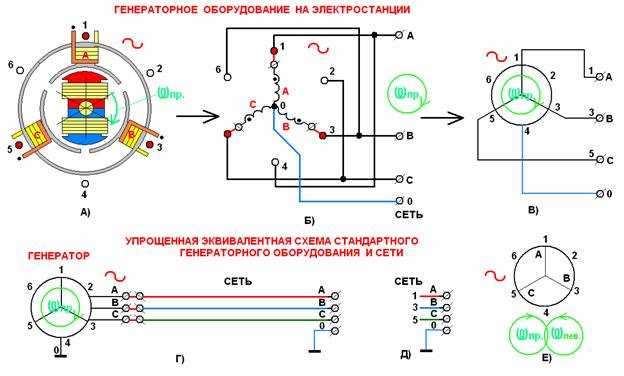 Эти листы помогут сконцентрировать магнитное поле на стержнях. Листы используются вместо сплошного куска металла, поскольку это повышает эффективность за счет уменьшения размера вихревых токов в роторе.
Эти листы помогут сконцентрировать магнитное поле на стержнях. Листы используются вместо сплошного куска металла, поскольку это повышает эффективность за счет уменьшения размера вихревых токов в роторе.
Когда ротор помещен внутрь статора и статор подключен к источнику электропитания, ротор начнет вращаться. Итак, как это возможно?
Как работают асинхронные двигатели
Когда электричество проходит по проводу, вокруг провода создается электромагнитное поле. Мы можем увидеть это, поместив несколько компасов вокруг провода, компасы будут вращаться, чтобы выровняться с этим магнитным полем. Если направление тока меняется на противоположное, меняется и магнитное поле, поэтому компас меняет направление.
Магнитное поле провода тянет и толкает циферблаты компаса. Точно так же, как если бы мы сдвинули два стержневых магнита навстречу друг другу. Они будут либо притягиваться, либо отталкиваться. Мы даже можем использовать один магнит для вращения другого магнита.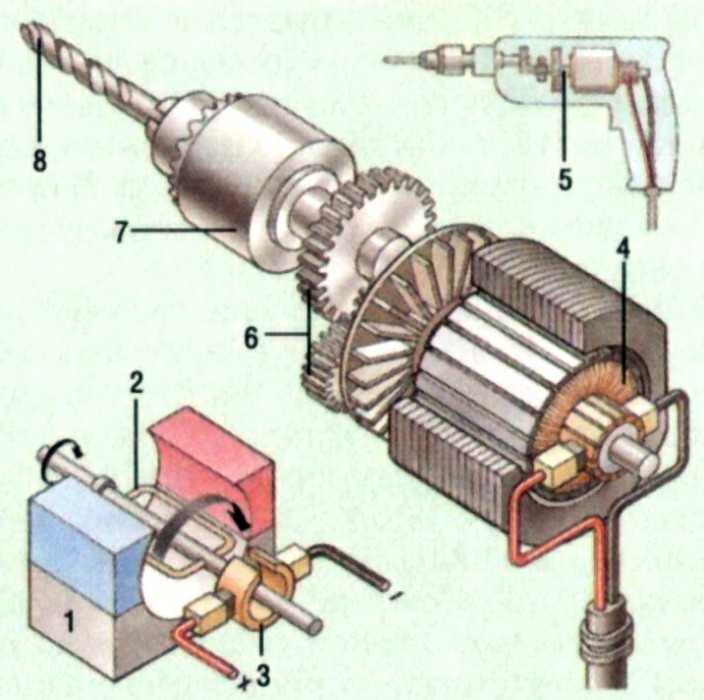 Или мы можем вращать магнит, изменяя интенсивность магнитного поля вокруг него.
Или мы можем вращать магнит, изменяя интенсивность магнитного поля вокруг него.
Если поместить провод в магнитное поле и пропустить через него ток, то магнитное поле провода будет взаимодействовать с постоянными магнитами, магнитное поле и на провод будет действовать сила. Эта сила будет перемещать провод либо вверх, либо вниз, в зависимости от направления тока и полярности магнитных полей.
Провод в магнитном полеЕсли мы смотаем провод в катушку, электромагнитное поле станет сильнее, катушка создаст северный и южный полюса, как постоянный магнит. Мы называем эти катушки проволоки индуктором. Когда мы пропускаем переменный ток через провод, электроны будут постоянно менять направление между движением вперед и назад. Таким образом, магнитное поле также будет расширяться и сжиматься, а полярность каждый раз будет меняться. Когда мы поместим другую отдельную катушку в непосредственной близости и замкнем цепь, электромагнитное поле индуцирует ток в этой второй катушке.
Мы можем соединить две катушки вместе и разместить их напротив друг друга, чтобы создать большее магнитное поле. Если мы поместим замкнутую проволочную петлю внутри этого большого магнитного поля, мы индуцируем ток в этой петле. Как мы знаем, когда мы пропускаем ток через провод, он генерирует магнитное поле, и мы также знаем, что магнитные поля будут толкать или притягивать друг друга. Таким образом, эта проволочная петля также будет генерировать магнитное поле, и оно будет взаимодействовать с большим магнитным полем. На каждую сторону катушки действуют противоположные силы, заставляющие ее вращаться. Таким образом, эта петля является нашим ротором, а катушки — статором.
Если мы поместим замкнутую проволочную петлю внутри этого большого магнитного поля, мы индуцируем ток в этой петле. Как мы знаем, когда мы пропускаем ток через провод, он генерирует магнитное поле, и мы также знаем, что магнитные поля будут толкать или притягивать друг друга. Таким образом, эта проволочная петля также будет генерировать магнитное поле, и оно будет взаимодействовать с большим магнитным полем. На каждую сторону катушки действуют противоположные силы, заставляющие ее вращаться. Таким образом, эта петля является нашим ротором, а катушки — статором.
Ротор будет вращаться только до тех пор, пока не выровняется с катушками статора, затем он застрянет, когда индуцированный ток изменит направление с катушкой. Чтобы преодолеть это, нам нужно ввести еще один набор катушек в статоре, и мы должны подключить их к другой фазе. Электроны в этой фазе текут в несколько другое время, поэтому электромагнитное поле также будет изменять силу и полярность в несколько другое время. Это заставит ротор вращаться.
Это заставит ротор вращаться.
Внутри асинхронного двигателя у нас есть 3 отдельные катушки, которые используются для создания вращательного электромагнитного поля. Когда мы пропускаем переменный ток через каждую катушку, катушки будут создавать электромагнитное поле, интенсивность и полярность которого меняются по мере того, как электроны меняют направление, но если бы мы соединили каждую катушку с другой фазой, то электроны в каждой катушка изменит направление в разное время. Это означает, что полярность и напряженность магнитного поля также будут иметь место в разное время.
Фаза 1, 2, 3Чтобы распределить это магнитное поле, нам нужно повернуть наборы катушек на 120 градусов по сравнению с предыдущей фазой, а затем объединить их в статор. Магнитное поле различается по силе и полярности между катушками, которые в совокупности создают эффект вращающегося магнитного поля.
Ранее в этой статье мы видели, что ток может индуцироваться во второй катушке, когда она находится в непосредственной близости. Стержни беличьей клетки закорочены на каждом конце, что создает несколько петель или катушек, поэтому каждый стержень индуцирует ток и создает магнитное поле.
Стержни беличьей клетки закорочены на каждом конце, что создает несколько петель или катушек, поэтому каждый стержень индуцирует ток и создает магнитное поле.
Магнитное поле стержней ротора взаимодействует с магнитным полем статора. Магнитное поле стержней ротора притягивается к магнитному полю статора. Поскольку магнитное поле вращается, ротор также будет вращаться в том же направлении, что и магнитное поле, чтобы попытаться выровняться с ним, но он никогда не сможет полностью догнать его.
Стержни ротора часто перекошены. Это помогает распределить магнитное поле по нескольким стержням и препятствует выравниванию и заклиниванию двигателя.
Электрические соединения
Статор содержит все катушки или обмотки, используемые для создания вращающегося электромагнитного поля при пропускании электричества по проводам. Для питания катушек мы находим электрическую клеммную коробку сверху, а иногда и сбоку.
Внутри этой коробки у нас есть 6 электрических клемм. Каждый терминал имеет соответствующую букву и номер, у нас есть U1, V1 и W1, затем W2, U2 и V2. У нас есть катушка первой фазы, подключенная к двум клеммам U, затем катушки фазы 2, подключенные к двум клеммам V, и, наконец, катушка фазы 3, подключенная к двум клеммам W. Обратите внимание, что электрические клеммы расположены по-разному на одной стороне и на другой. Мы увидим, почему это так, через мгновение.
Каждый терминал имеет соответствующую букву и номер, у нас есть U1, V1 и W1, затем W2, U2 и V2. У нас есть катушка первой фазы, подключенная к двум клеммам U, затем катушки фазы 2, подключенные к двум клеммам V, и, наконец, катушка фазы 3, подключенная к двум клеммам W. Обратите внимание, что электрические клеммы расположены по-разному на одной стороне и на другой. Мы увидим, почему это так, через мгновение.
Теперь мы подключаем наш трехфазный источник питания и подключаем его к соответствующим клеммам. Чтобы двигатель заработал, нам нужно замкнуть цепь, и есть два способа сделать это. Первый способ — дельта-конфигурация. Для этого мы подключаем клеммы от U1 к W2, от V1 к U2 и от W1 к V2. Это даст нам нашу дельта-конфигурацию.
Конфигурация треугольником Теперь, когда мы подаем переменный ток по фазам, мы видим, что электричество течет от одной фазы к другой, поскольку направление переменного тока меняется на противоположное в каждой фазе в разное время. Вот почему у нас есть терминалы в разном расположении в клеммной коробке, потому что мы можем легко соединиться и позволить электричеству течь между фазами, когда электроны меняются местами в разное время.
Вот почему у нас есть терминалы в разном расположении в клеммной коробке, потому что мы можем легко соединиться и позволить электричеству течь между фазами, когда электроны меняются местами в разное время.
Другой способ подключения терминалов — использование конфигурации «звезда» или «звезда». В этом методе мы соединяем W2, U2 и V2 только с одной стороны. Это даст нам наше эквивалентное звездообразное или звездообразное соединение. Теперь, когда мы пропускаем электричество через фазы, мы видим, что электроны распределяются между выводами фаз.
Конфигурация «звезда»Из-за различий в конструкции величина тока, протекающего в конфигурации «звезда» и «треугольник», отличается, и мы увидим некоторые расчеты для них ближе к концу статьи.
Расчеты звезда (звезда) треугольник
Давайте посмотрим на разницу между конфигурациями звезды и треугольника.
Допустим, у нас есть двигатель, соединенный треугольником, с напряжением питания 400 Вольт. Это означает, что когда мы используем мультиметр для измерения напряжения между любыми двумя фазами, мы получим показание 400 вольт, мы называем это межфазным напряжением.
Теперь, если мы измерим два конца катушки, мы снова увидим межфазное напряжение 400 Вольт. Допустим, каждая катушка имеет сопротивление или импеданс, поскольку это переменный ток, 20 Ом. Это означает, что мы получим показание тока на катушке 20 ампер. Мы можем рассчитать это из 400 вольт, разделенных на 20 Ом, что составляет 20 ампер. Но ток в линии будет другой, он будет 34,6А. Мы получаем это из 20 ампер, умноженных на квадратный корень из 3, что составляет 34,6 ампер, потому что каждая фаза подключена к двум катушкам.
Соединение треугольником Теперь, если мы посмотрим на конфигурацию звезды или звезды, мы снова получим линейное напряжение 400 В. Мы видим это, если измеряем между любыми двумя фазами. Но в конфигурации звезды все наши катушки соединены вместе и встречаются в точке звезды или в нейтральной точке. Именно отсюда мы можем провести нейтральный провод, если это необходимо. Итак, на этот раз, когда мы измеряем напряжение на концах любой катушки, мы получаем более низкое значение 230 вольт, потому что фаза не подключена напрямую к двум катушкам, как в конфигурации треугольника, один конец катушки подключен к фаза, а другая подключена к общей точке, поэтому напряжение является общим.