Серводвигатели
Серводвигатель — это вращающийся электродвигатель, который позволяет точно контролировать угловое положение, скорость и ускорение. Он состоит из подходящего двигателя, подключенного к датчику обратной связи по положению. Это также требует относительно сложного контроллера, часто специального модуля, разработанного специально для использования с серводвигателями.
Щеточные двигатели постоянного тока
Щеточные двигатели постоянного тока являются самой простой формой серводвигателя. Конструкция двигателя имеет медные обмотки на роторе и постоянные магниты на статоре. На обмотки на роторе подается напряжение, чтобы создать вращающееся поле, которое, в свою очередь, вызывает вращение обмоток на роторе. Для того, чтобы на двигателе возникло вращающееся поле, ток ротора должен быть подключен к соседним катушкам или обмоткам. Это осуществляется с помощью щетки, освобождающей коммутационные сегменты, расположенные на роторе двигателя. При вращении ротора различные катушки получают питание через щетки и коммутационные сегменты.
KCD Absolute Kit Encoders
Бесщеточный серводвигатель постоянного тока
Поскольку название подразумевает бесщеточный DC, BLDC, серводвигатель не имеет щеток или коммутационных сегментов для переключения тока через обмотки для создания вращающегося поля. Конструкция бесщеточного электродвигателя постоянного тока, по существу, отличается от конструкции серводвигателя постоянного тока в том, что обмотки двигателя расположены в статоре, а постоянные магниты расположены на роторе двигателя. Этот тип конструкции выгоден, так как он перемещает тяжелый медный провод от ротора и заменяет его более легкими постоянными магнитами. Это уменьшает вращательную инерцию ротора двигателя, что позволяет ротору двигателя ускоряться и замедляться значительно быстрее, чем щеточный двигатель постоянного тока.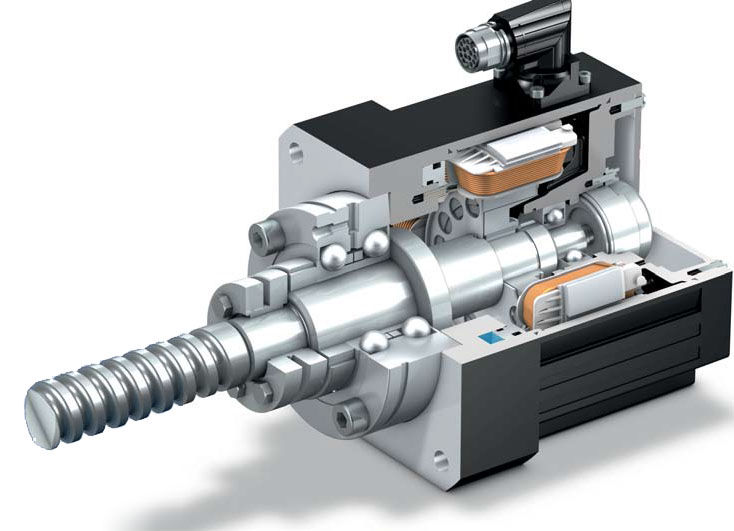
Недостатком бесщеточных двигателей постоянного тока является то, что они требуют некоторой формы электрических коммутационных сигналов, генерируемых либо датчиками эффекта Холла, либо датчиком с «дорожками Холла». Эти сигналы передают данные о положении ротора на привод двигателя, так что привод может переключать ток через обмотки статора, вызывая вращающееся магнитное поле. С появлением высокопроизводительного недорогого энкодера Magnetic Absolute Multiturn, такого как серия KCD фирмы POSITAL, приводы отходят от традиционных «коммутационных дорожек» и используют абсолютную информацию о положении энкодера для переключения фазных токов бесщеточного двигателя. Используя абсолютную обратную связь с энкодером, информация о положении энкодера может использоваться как для коммутации двигателя, так и для управления положением серво контура.
POSITAL Kit Encoder на сервомоторе постоянного тока
Что такое сервопривод (сервомотор) и как им управлять
Сервопривод – это привод, вал которого может встать в заданное положение или поддерживать заданную скорость вращения. Другими словами, валом сервопривода можно управлять, например, задавая ему положение в градусах или определенную частоту вращения.
Сервоприводы используются в самых разных областях, например, в робототехнике они помогают моделировать различные движения роботов. Сервоприводы – эффективное решение для перемещения механизмов в пространстве.
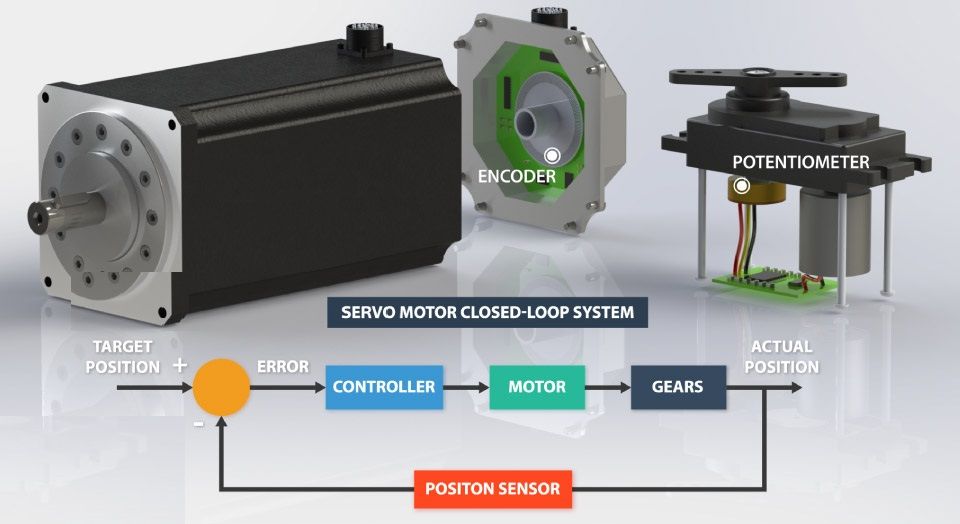
Если говорить об основных элементах сервопривода, то он состоит из блока управления, мотора и датчика.
Управление происходит через печатную плату, к которой подключен мотор постоянного тока и потенциометр (датчик). Внутри блока управления также находятся шестерни редуктора.
Фактически сам привод представляет собой электрический мотор с редуктором, именно электромотор преобразует электричество в механическое действие. Но скорость вращения мотора не всегда подходит для достижения поставленных целей. Чтобы было возможно управлять вращением мотора, используется редуктор. В итоге он понижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует получаемый на выходе результат.
Но скорость вращения мотора не всегда подходит для достижения поставленных целей. Чтобы было возможно управлять вращением мотора, используется редуктор. В итоге он понижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует получаемый на выходе результат.
Также из сервопривода выходят три провода. Два из них питают мотор, третий провод используется для подачи сигнала, который несет в себе заданное значение.
При включении электромотора запускается вращение выходного вала. К нему можно подключить или присоединить то, чем в дальнейшем планируется управлять.
Сервопривод получает заданное значение, после этого сравнивает данное значение со значением на своем датчике. В случае расхождения блок управления стремится достичь и поддержать заданное значение, чтобы оно по возможности совпадало со значением, которое поступает с датчика.
Крутящий момент (Усилие на валу). Измеряется в кг/см. Представляет собой произведение силы на длину рычага. На практике крутящий момент отвечает за ускорение выходного вала и его способность преодолевать сопротивление вращению. Чем выше крутящий момент, тем больше возможностей у мотора реализовать свой потенциал.
Представляет собой произведение силы на длину рычага. На практике крутящий момент отвечает за ускорение выходного вала и его способность преодолевать сопротивление вращению. Чем выше крутящий момент, тем больше возможностей у мотора реализовать свой потенциал.
Скорость поворота. Означает скорость, с которой выходной вал сервопривода меняет свое положение. Угол изменения положения указывается в градусах.
Угол поворота. Это максимальный угол, на который может повернуться выходной вал. Наиболее распространенные значения для этой характеристики: 180° и 360°.
Габариты сервопривода. Сервоприводы бывают маленькие, стандартные и большие. Стандартные сервоприводы самые недорогие. При отклонении габаритов от стандартных значений цена, как правило, меняется пропорционально такому отклонению.
Материал шестерней. Шестерни редуктора производятся из пластика, карбона, металла. Пластиковые шестерни легкие, но не предназначены для серьезных нагрузок. Карбоновые шестерни более прочные, но и более дорогие. Металлические шестерни – самые тяжелые, идеально подходят для максимальных нагрузок.
Карбоновые шестерни более прочные, но и более дорогие. Металлические шестерни – самые тяжелые, идеально подходят для максимальных нагрузок.
Виды сервоприводов
Сервоприводы бывают цифровые и аналоговые.
По внешнему виду они почти не отличаются друг от друга. Основное отличие заключается в принципе управления мотором. У аналоговых сервоприводов управление происходит с помощью специальной микросхемы, цифровые сервоприводы обладают микропроцессором. Микросхема и микропроцессор способны принимать и анализировать управляющие импульсы. Только на микросхему они обычно поступают с частотой 50 Гц, а на микропроцессор – с частотой 200 Гц и более. В результате этого цифровой сервопривод мобильнее и четче реагирует на управляющий сигнал.
Цифровые сервоприводы – это новый шаг в развитии техники, и они характеризуются рядом преимуществ. К таким преимуществам относятся: высокая точность позиционирования, возможность более быстрого управления приводом, возможность поддержания постоянного крутящего момента.
Подключение к Arduino
Для достижения самых разных целей робототехники к программируемому контроллеру Arduino может быть подключен сервопривод. Подключение осуществляется через кабели, которые выходят из сервопривода. Обычно это три кабеля: красный; коричневый или черный; желтый, оранжевый или белый.
Красный кабель отвечает за питание сервопривода. Коричневый — за заземление. Желтый – подключается непосредственно к плате Arduino и предназначен для передачи управляющего сигнала.
Подключение сервопривода к плате Arduino производится через ШИМ-выводы.
Итак, черный провод подключается к любому GND-пину.
Красный кабель питания (VTG) — к соответствующему выводу для подключения питания.
Белый сигнальный кабель – к ШИМ-выводу.
Питание сервоприводов
Большинство плат Arduino рассчитано на 500 мА. Исходя из этого, сервопривод является достаточно энергоемким компонентом, так как потребляет более 100 мА.
• Обеспечить питание сервопривода от дополнительно приобретенного блока питания, например, 5 или 6 В;
• При отсутствии блока питания с нужным напряжением, можно использовать стабилизатор.
Напрямую к Arduino можно подключать только маломощный сервопривод. В противном случае пользователя ожидают разные побочные эффекты: от перезагрузки платы до перегорания отдельных компонентов.
Количество сервоприводов
Количество подключаемых к плате Arduino сервоприводов ограничено. Большинство моделей Arduino предусматривает подключение 12 сервоприводов, Arduino Mega позволяет подключить до 48 сервоприводов.
Управление сервоприводом
Библиотека Servo
Библиотека для сервопривода содержит в себе набор дополнительных команд, которые позволяют вводить программу в упрощенном виде.
На сегодняшний день уже написаны программы для самых разных целей. Библиотеки можно подобрать по ссылке https://www.arduino.cc/reference/en/libraries/.
На платах Arduino за исключением модели Arduino Mega обращение к библиотеке отключает функцию analogWrite(PWM) на пинах 9 и 10. Наличие подключения сервопривода или отсутствие такового при этом роли не играет. На платах Arduino Mega можно подключить до 12 сервомоторов без отключения функции PWM.
Для управления сервоприводом предусмотрена библиотека Servo.h.
Вызывается она через #include <Servo.h>. После подключения библиотеки становится возможным пользоваться списком, содержащихся в ней функций. С функциями библиотеки можно ознакомиться через меню «Файл/примеры». Для каждого сервопривода создается свой «объект» (servo), который прикрепляется к соответствующему цифровому пину. После этого программируемый контроллер Arduino готов отправлять управляющие сигналы на конкретный сервопривод. Передача сигналов производится постоянно, даже при «простое» сервопривода. Для приостановки передачи сигналов нужно отправить команду вручную.
Передача сигналов производится постоянно, даже при «простое» сервопривода. Для приостановки передачи сигналов нужно отправить команду вручную.
Управляющий сигнал
Для управления сервоприводом управляющий сигнал приобретает решающее значение. Он представляет собой импульс, который имеет нужную ширину и посылается с соответствующей частотой. Ширину импульса можно вбивать в программном коде вручную, методом подбора достигнув точного угла, или использовать команды библиотеки, указывая нужный угол в градусах. У разных марок сервоприводов ширина импульса для поворота выходного вала на определенный угол может быть различна.
Импульсы отвечают как за движение сервопривода, так и за его неподвижное положение. Работа сервопривода происходит в замкнутом цикличном кругу посылаемых импульсов.
Управляющие команды
Управление сервоприводом через библиотеку основано на следующих командах:
• attach() — позволяет подключить определенный сервопривод к соответствующему пину;
• write() — на пин поступают значения для управления им;
• writeMicroseconds() — позволяет управлять сервоприводом путем передачи на него значений в микросекундах;
• read() — считывает значение текущего положения сервопривода;
• attached() — контролирует подключение сервопривода к пину;
• detach() — отключает сервопривод от конкретного пина.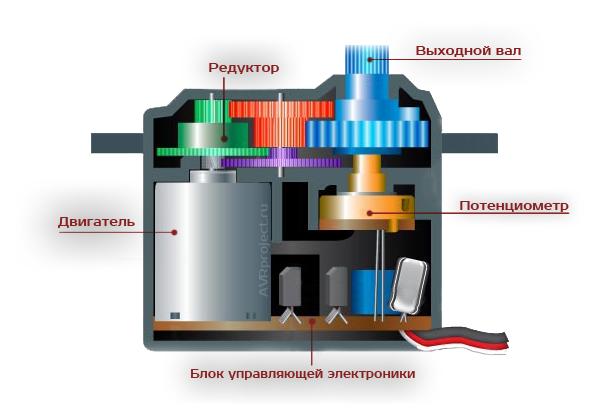
Возможные сложности
Если в работе сервопривода возникают нарушения, то, как правило, об этом говорят соответствующие шумы: жужжание, потрескивание и прочее. Ниже рассмотрим основные причины таких шумов.
Невозможность поворота на заданный угол
Бывают случаи, когда поворот сервопривода на заданный угол невозможен. Например, на его пути возникает какая-либо преграда. Этой преградой может стать закрепленное на сервоприводе устройство или его часть. Упираясь в преграду, сервопривод начинает характерно жужжать. Чтобы решить данную проблему, в программу вносятся команды, ограничивающие перемещение сервопривода путем изменения угла перемещения.
Настройки начальной и конечной позиции
Иногда необходимо подкорректировать координаты начальной или конечной позиции. Это нужно когда значения датчика и фактического положения выходного вала расходятся относительно конечной позиции последнего. Например, выходной вал находится в конечной позиции, но датчик считает, что он еще ее не достиг и пытается заставить выходной вал продолжить движение. Возникает характерный шум. В этом случае начальная позиция не обязательно должна начинаться с 0°С, а конечная не обязательно должна заканчиваться на 180°C. Эти предельные значения можно немного сдвинуть на 5-10°C, и проблема будет решена.
Например, выходной вал находится в конечной позиции, но датчик считает, что он еще ее не достиг и пытается заставить выходной вал продолжить движение. Возникает характерный шум. В этом случае начальная позиция не обязательно должна начинаться с 0°С, а конечная не обязательно должна заканчиваться на 180°C. Эти предельные значения можно немного сдвинуть на 5-10°C, и проблема будет решена.
Заключение
На сегодняшний день сервопривод – это необходимый элемент в робототехнике, с помощью которого воплощаются многие творческие проекты. Этот умный управляемый моторчик предназначен для моделирования движения. Пользоваться его функциями достаточно просто, уже написано множество программ, которые могут быть использованы в качестве трафарета для воплощения собственных идей. Сервопривод подключается к программируемому контроллеру Arduino. Все тонкости этого процесса подробно освещены как в этой статье, так и в других статьях, выложенных в сети.
Современные магазины предлагают большой выбор сервоприводов. Зная нужные характеристики, легко подобрать подходящую модель.
Зная нужные характеристики, легко подобрать подходящую модель.
Что такое серводвигатель? Как это работает и приложение
Пожалуйста, заполните следующую форму, чтобы ваше ответственное контактное лицо могло связаться с вами.
Тема (*)
Продажи
Сервис
НЕДВИЖИТЕЛЬНЫЙ ВКУ
Имя
Пожалуйста, укажите имя
Фамилия (*)
Пожалуйста, заполните фамилию
Lastname
Недопустимый вход
, номер
, пожалуйста, предоставьте улицу и номер
(*)
Пожалуйста, заполните. zip code
City (*)
Invalid Input
Country (*)
Please Select—United KingdomUnited StatesIrelandIndia—AfghanistanAland IslandsAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua and BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBonaire, Sint Eustatius and SabaBosnia and HerzegovinaBotswanaBouvet IslandBrazilBritish Indian Ocean ТерриторияБрунейБолгарияБуркина-ФасоБурундиКамбоджаКамерунКанадаКабо-ВердеКаймановы островаЦентральноафриканская РеспубликаЧадЧилиКитайОстров РождестваКокосовые острова (Килинг)КолумбияКоморские островаКонгоОстрова КукаКоста-РикаКот-д’Ивуар (I vory Coast)CroatiaCubaCuracaoCyprusCzech RepublicDemocratic Republic of the CongoDenmarkDjiboutiDominicaDominican RepublicEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEthiopiaFalkland Islands (Malvinas)Faroe IslandsFijiFinlandFranceFrench GuianaFrench PolynesiaFrench Southern TerritoriesGabonGambiaGeorgiaGermanyGhanaGibraltarGreeceGreenlandGrenadaGuadaloupeGuamGuatemalaGuernseyGuineaGuinea-BissauGuyanaHaitiHeard Island and McDonald IslandsHondurasHong KongHungaryIcelandIndiaIndonesiaIranIraqIrelandIsle of ManIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKosovoKuwaitKyrgyzstanLaosLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacaoMacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldavaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmar (Burma)NamibiaNauruNepalNetherlandsNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorth KoreaNorthern Mariana IslandsNorwayO manPakistanPalauPalestinePanamaPapua New GuineaParaguayPeruPhillipinesPitcairnPolandPortugalPuerto RicoQatarReunionRomaniaRussiaRwandaSaint BarthelemySaint HelenaSaint Kitts and NevisSaint LuciaSaint MartinSaint Pierre and MiquelonSaint Vincent and the GrenadinesSamoaSan MarinoSao Tome and PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSint MaartenSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth Georgia and the South Sandwich IslandsSouth KoreaSouth SudanSpainSri LankaSudanSurinameSvalbard and Jan MayenSwazilandSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandTimor-Leste (East Timor)TogoTokelauTongaTrinidad and TobagoTunisiaTurkeyTurkmenistanTurks and Caicos ОстроваТувалуУгандаУкраинаОбъединенные Арабские ЭмиратыВеликобританияСоединенные ШтатыУругвайУзбекистанВануатуВатиканВенесуэлаВьетнамВиргинские острова, Британские Виргинские острова, СШАУоллис и ФутунаЗападная СахараЙеменЗамбияЗимбабве
Пожалуйста, выберите страну
Код страны
Недопустимый вход
Телефон
Инвалидный вход
oppertephone
Инвалидный ввод
Электронная почта (*)
Private Private Domines Opply
Private Private Domines Opterned
Private Private Private Opviled
2
Private Private Private.
Spamschutz (*)
Сбой защиты от спама.
Поля, отмеченные звездочкой (*), обязательны для заполнения.
Серводвигатель: основы, работа, взаимодействие и применение
Необходимые компоненты
ВведениеУзнайте все о серводвигателях вместе с нами в этом руководстве по электронике для начинающих: что такое серводвигатель, как он работает, как связать его с evive и легко запрограммировать в PictoBlox – наша платформа графического программирования на основе блоков Scratch с расширенными возможностями взаимодействия с оборудованием. После того, как вы овладеете базовыми знаниями об ИК-датчике, мы покажем несколько проектов, которые вы можете сделать своими руками с помощью серводвигателя.
Чтобы работать в PictoBlox, сначала необходимо загрузить его ЗДЕСЬ.
Готов? Набор. Идти!
Что такое серводвигатель и как он работает? Серводвигатель или просто сервопривод — это устройство, которое используется для В отличие от двигателей постоянного тока, они обычно поворачиваются на определенный угол, а затем остановка .
Если разобрать серводвигатель, внутри него вы найдете следующее:
- Двигатель постоянного тока
- Потенциометр
- Зубчатая передача, т. е. ряд шестерен, соединенных таким образом, что их зубья зацеплены/соединены между собой.
- Цепь управления: эта цепь является фактическим мозгом, обеспечивающим точную работу сервопривода. Он контролирует, насколько сервопривод должен двигаться или вращаться в зависимости от получаемого им ввода.
Теперь, когда у нас есть небольшое представление о работе серводвигателя, давайте посмотрим, как связать его с evive и посмотрим на него в действии.
- Вы можете напрямую подключать и управлять двумя серводвигателями одновременно с помощью evive, так как для него предусмотрено два выделенных канала для двигателей: S1 и S 2 .
- Чтобы лучше визуализировать работу сервопривода, прикрепите рупор сервопривода к головке сервопривода.

- После того, как вы прикрепили сервопривод, давайте подключим сервопривод к каналу сервопривода 1, т.е. S1.
Убедитесь, что коричневый провод подходит к крайнему левому контакту.
Управление серводвигателем с помощью прошивки evive
Для управления сервоприводом напрямую с помощью серводвигателя следуйте приведенным ниже инструкциям:
- Переключите evive ON .
- Затем в его меню выберите Элементы управления .
- Далее выберите Сервоприводы .
- Наконец, перейдите к Servo 1.
Вы заметите, что значение текущего угла серводвигателя отображается на экране evive. Вы можете контролировать угол, используя соответствующую ручку потенциометра, к которой подключен сервопривод канала.
Работа серводвигателя в режиме реального времени Выполните следующие шаги, чтобы написать сценарий для управления серводвигателем в режиме реального времени. Серводвигатель устанавливает угол серводвигателя на значение, введенное пользователем.
Серводвигатель устанавливает угол серводвигателя на значение, введенное пользователем.
Чтобы написать сценарий, выполните следующие шаги:
- Подключите evive к компьютеру и откройте PictoBlox.
- Перейдите на панель инструментов и щелкните меню Board . Затем выберите evive в качестве доски.
- Затем выберите порт, к которому подключен evive, например. COMXX или ttyXX из появившегося диалогового окна. После выбора порта значок рядом с вкладкой Connect станет подключенным.
Перед написанием скрипта убедитесь, что прошивка залита. Если нет, загрузите его с помощью кнопки Загрузить прошивку. - Вы можете управлять серводвигателем в PictoBlox с помощью блока set servo on () to () angle . Вы можете найти эти блоки в палитре Actuators .
- Мы будем использовать блок запроса , чтобы попросить пользователя ввести желаемое значение, до которого он хочет повернуть
- После того, как пользователь введет значение, сервопривод должен быть установлен на этот угол.
 Таким образом, в пустое пространство блока set servo on () to () перетащите ответ пользователя.
Таким образом, в пустое пространство блока set servo on () to () перетащите ответ пользователя. - Теперь, когда угол установлен, Тоби должен сказать вслух, что угол сервопривода установлен на значение, введенное пользователем. Таким образом, перетащите блок say в указанное место, поместите блок join , напишите «Готово! Установите угол сервопривода в ” в первом блоке и перетащите ответ во второе пространство.
- Для непрерывного запуска скрипта мы будем использовать блок навсегда.
- Поместите блок шляпы при щелчке флага над блоком навсегда. Это гарантирует, что скрипт запустится при нажатии на зеленый флажок.
- Щелкните флажок и нажимайте клавиши со стрелками, чтобы проверить скрипт и убедиться, что он работает нормально.
Ниже приведен полный скрипт:
Вы можете скачать код для управления серводвигателем в режиме реального времени отсюда.
Работа серводвигателя в режиме загрузки Теперь давайте создадим скрипт для использования серводвигателя без подключения evive к компьютеру. Для этого нам придется работать в режиме загрузки. Мы напишем скрипт для запуска сервопривода туда и обратно, то есть от 0° до 180°, а затем обратно до 0°.
Для этого нам придется работать в режиме загрузки. Мы напишем скрипт для запуска сервопривода туда и обратно, то есть от 0° до 180°, а затем обратно до 0°.
- Для работы в режиме загрузки нажмите кнопку-переключатель.
- Давайте сначала создадим две переменные для хранения значений угла и фактора (значение, на которое будет изменяться угол сервопривода).
- Установите начальное значение угла как 0 и коэффициент как 5.
- Используйте блок навсегда для непрерывного выполнения кода.
- Теперь установим угол сервопривода. Угол должен изменяться каждый раз в 5 раз. Таким образом, перетащите набор сервоприводов на () в () блок угла и в пустое место поместите значение угла.
- Теперь, когда угол должен измениться на коэффициент, перетащите блок переменной на () и поместите коэффициент в указанное место.
- Минимальное и максимальное значения сервопривода равны 0 и 180 соответственно.