Правда о пяти мифах частотно регулируемого привода.
Знание принципов работы частотно регулируемого привода (ЧРП) может упростить процесс выбора преобразователя частоты.
Автор: Пол Эйвери, Yaskawa America Inc.
Независимо от того, насколько давно и каким образом, уже обыденные частотные преобразователи пришли в Вашу жизнь, где-то есть тот, кто впервые стукнулся с ЧРП или только рассматривает возможность их применения. Вспомните, когда вы впервые задумались о применении одного из современных частотных преобразователей с широтно-импульсной модуляцией для двигателя переменного тока. Скорее всего, у вас, на тот момент, было не совсем верное представление об их возможностях и назначении. В этой статье мы рассмотрим и постараемся развеять пять распространенных мифов о частотно регулируемом приводе.

Рис. 1. Частотный преобразователь
Миф № 1: Выходной сигнал частотного преобразователя является синусоидальным
Людям, так или иначе связанные с эксплуатацией электродвигателей в, как правило, знакома работа асинхронных двигателей переменного тока с использованием пускателей. При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя с фазами 3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения на клеммах электродвигателя). Пока вроде всё просто и понятно.
А вот что происходит на выходе преобразователя частоты, это совсем другая история. Частотный преобразователь обычно выпрямляет входное трехфазное переменное в постоянное напряжение, которое фильтруется и аккумулируется при помощи больших конденсаторов звена постоянного тока. Напряжение звена постоянного тока затем инвертируется, для получения переменного напряжения, переменной частоты на выходе. Процесс инверсии осуществляется посредством трех изолированных биполярных транзисторов (IGBT) с двумя изолированными затворами — по одной паре на выходную фазу (см. Рис 2). Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.
Рис. 2. Схема инвертора с IGBT транзисторами.
Результирующий сигнал напряжения, прикладываемый к обмотке двигателя, не является синусоидальным (см. Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.
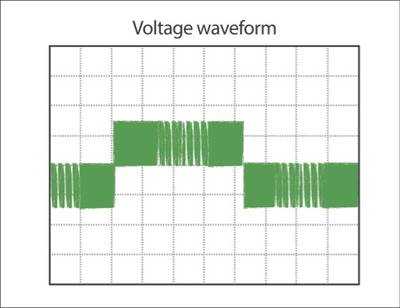
Рис. 3. Форма сигнала ШИМ напряжения на выходе частотного преобразователя
Как же отразится пилообразная форма питающего напряжения на работе электродвигателя. Асинхронный двигатель является по своей сути большой катушкой индуктивности. А характерной особенностью индукции является ее устойчивость к изменениям тока. Увеличивается или уменьшается сита ток, индукция будет выступать против этого изменения. Какое же это имеет отношение к форме сигнала напряжения ШИМ на рисунке 3? Вместо того, чтобы позволить импульсу тока увеличиваться в том же порядке, что и приложенный импульс напряжения, ток начнет медленно возрастать. Когда импульс напряжения закончился, ток плавно уменьшается, а не исчезает мгновенно. В общих чертах это происходит следующим образом: до момента, когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).
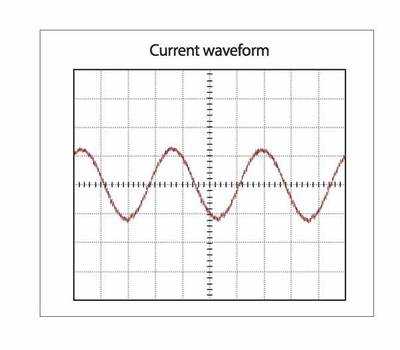
Рис. 4. Форма сигнала тока на выходе частотного преобразователя
Однако не думайте, что вы можете подключить свой соленоид к фазам выходного напряжения ЧРП. Это всё же не совсем переменное напряжение.
Миф № 2: все частотные преобразователи одинаковы
В общем виде частотно-регулируемый привод сегодня является довольно зрелым продуктом. Большинство коммерчески доступных приводов содержат одни и те же базовые компоненты: мостовой выпрямитель, блок питания, конденсаторный блок постоянного тока и плата выходного инвертора. Разумеется, существуют различия в алгоритмах управления переключением транзисторов IGBT инвертора, надежности компонентов и эффективности схемы теплового рассеивания. Но основные компоненты остаются прежними.
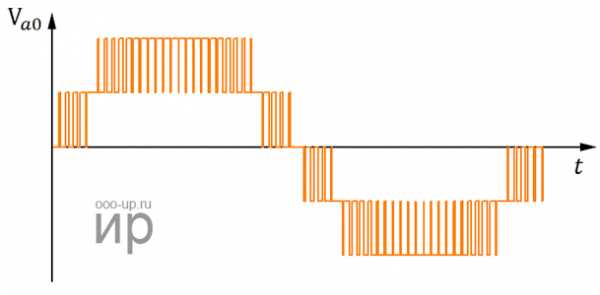
Есть также исключения. Например, в некоторых ЧРП инвертер имеет три вывода. Такая схема позволяет выходным импульсам варьироваться от половинного до полного импульса сигнала напряжения (см. Рис. 5).
Рис. 5. Трехуровневый выходной сигнал напряжения
Для достижения трехуровневого выходного сигнала звено инвертора должно иметь в два раза больше выходных переключателей, а также запирающих диодов (см. Рис. 6). Преимущества трехуровневой схемы заключается в уменьшении перенапряжения на двигателе из-за гармонических волн, снижении синфазных помех, а также снижении паразитных токов на валах и подшипниках.
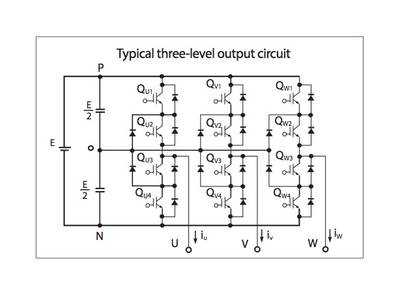
Рис. 6. Схема трехуровневого инвертора
Матричный инвертор является еще более нетипичным типом ЧРП. Частотные преобразователи с матричными инверторами не имеют шины постоянного тока или мостового выпрямителя. Вместо этого они используют двунаправленные переключатели, которые могут подключать любое из входящих фазных напряжений к любой из трех выходных фаз (см. Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую сеть.
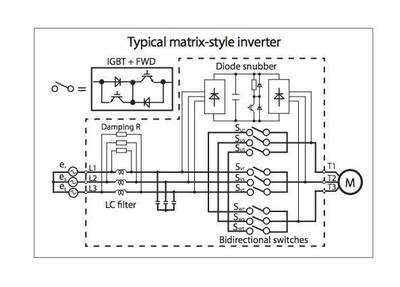
Рис. 7. Схема матричного ЧРП
Кроме частотных преобразователей с трехуровневыми выходами и инверторами матричного типа существуют также и другие типы частотно-регулируемых приводов. Таким образом миф о том, что все частотные преобразователи одинаковые развеян.
Миф № 3: Частотный преобразователь компенсирует коэффициентом мощности.
Нередко можно увидеть, что производители частотных преобразователей заявляют значение коэффициента мощности, например, равным 0,98 или почти 1. Действительно коэффициент мощности несколько улучшается после установки ЧРП перед асинхронным двигателем. ЧРП компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
Полный коэффициент мощности должен включать реактивную мощность, вызываемую гармониками, создаваемыми в звене постоянного тока. Причиной является работа диодного моста. Важно помнить, что диод работает только тогда, когда напряжение на стороне анода выше, чем напряжение на стороне катода (прямое смещение). Это означает, что диоды открыты только на пике каждой временной фазы как положительной, так и отрицательной частей синусоидальной волны. Это приводит к волнообразной форме волны. Это также приводит к искажению входного тока и прерыванию (см. Рис. 8).
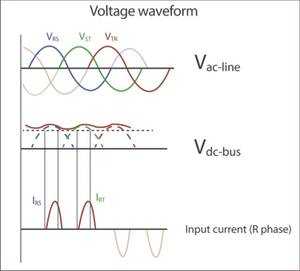
Рис. 7. Форма сигналов после выпрямителя
Чтобы вычислить истинный полный коэффициент мощности (PF), необходимо учесть эффекты гармоник. Следующее уравнение показывает, как гармоники влияют на полный коэффициент мощности:
где THD
Для прерывистого сигнала входного тока в уравнении THD будет находиться в районе 100% или более. Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который не учитывает гармоники.
Но не всё так плохо. В настоящее время существует множество способов гармонические искажения, создаваемые в звене постоянного тока. Они используют как пассивные, так и активные методы подавления искажений входного сигнала. Так, например, вышеупомянутый матричный преобразователь частоты является примером активного метода подавления гармонических искажений.
Миф № 4: С частотным преобразователем Вы можете эксплуатировать двигатель на любой скорости.
Особенность применения частотных преобразователей заключается, что они могут изменять как напряжение, так и частоту выходного сигнала. Благодаря возможности обеспечения требуемой скорости вращения электродвигателя ЧРП нашли широкое применение во всех сферах экономики и всех отраслях промышленности ЧРП может легко выдавать сигнал любой частоту в пределах предусмотренного изготовителем диапазона регулирования. Однако необходимо учитывать, что частотный преобразователь работает в составе электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Ограничение № 1. С точки зрения охлаждения электродвигателя, низкая скорость вращения — это не очень хорошая идея. В частности, полностью закрытые вентиляторные (TEFC) двигатели имеют охлаждаются только за счет внутреннего вентилятора, который вращается вместе с валом двигателя. Чем медленнее скорость вращения двигатель, тем меньше поток воздуха и тем хуже охлаждение. Закрытые двигатели обычно не рекомендуются эксплуатировать с частотой ниже 15 Гц (диапазон скоростей 4:1).
Ограничение № 2: Электродвигатели имеют определенные ограничения диапазона скоростей, связанные с механическими и динамическими ограничениями нагрузок вращающихся частей. Обычно эта скорость называется максимальной безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Ограничение № 3: При достижении максимальной частоты вращения крутящий момент двигателя может снижаться. Это ограничение скорости связано с ограничением мощности, которое включает в себя скорость вращения и крутящий момент. Если быть еще точнее, что будет снижаться напряжения ЧРП. Обратите внимание, что вращение двигателя также генерирует собственное напряжение, называемое обратной электродвижущей силой (ЭДС), которое увеличивается со скоростью. Обратная ЭДС создается двигателем, чтобы противостоять приложенному напряжению от ПЧ. На более высоких скоростях ПЧ должен подавать еще большее напряжения, чтобы преодолеть обратную ЭДС, и ток мог протекать по обмоткам двигателя, создавая крутящий момент. После определенного максимального значения преобразователь частоты не может преодолеть обратную ЭДС электродвигателя, и, следовательно, крутящий момент двигателя уменьшается, что, в свою очередь, снижает скорость. Снижение скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем моменте.
Как упоминалось выше ЧРП может создавать крутящий момент на двигателе, сохраняя постоянство отношения V/f (см. Рис. 9).
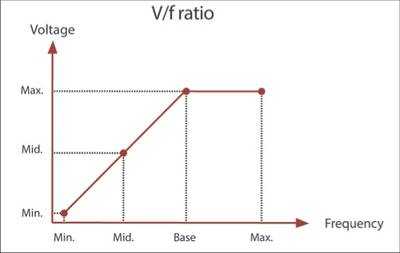
Рис. 9. График зависимости напряжения от частоты.
Когда частота выходного сигнала увеличивается, напряжение увеличивается линейно. Проблема возникает, когда частота превышает номинальную частоту двигателя. Помимо номинальной частоты, не может увеличиваться выходное напряжение, что соответственно приводит к уменьшению отношения V / f. Отношение V / f является мерой напряженности магнитного поля в двигателе и влияет на его крутящий момент. Следовательно, способность мотора создавать номинальный крутящий момент при частоте выше номинальной должна уменьшаться со скоростью 1 / частота, при этом произведение крутящего момента и частоты, равное мощности, является постоянным. Область работы над номинальной частотой называется постоянным диапазоном мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).
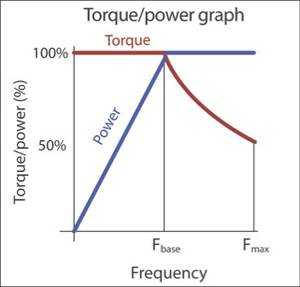
Рис. 10. Графики зависимости мощности и крутящего момента электродвигателя от частоты.
Миф № 5: Входной ток преобразователя частоты выше выходного тока
Возможно, это не миф, а недоразумение. Некоторые пользователи ПЧ измеряют значение выходного и входного тока с помощью измерительного инструмента или с помощью мониторов ПЧ и обнаруживают, что входной ток намного ниже выходного. Это похоже не согласуется с идеей о том, что частотный преобразователь должен иметь некоторые потери и поэтому вход всегда должен быть немного выше, чем выход. Концепция правильная, но она учитывает мощность, а не ток, который следует учитывать:
Входное напряжение всегда находится под напряжением переменного тока. Выходное напряжение изменяется со скоростью по образцу V / f. На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который, как следует из названия, отвечает за создание крутящего момента.
Привод потребляет входной ток, пропорциональный активному крутящему моменту двигателя. Ток, необходимый для создания магнитного поля, обычно не изменяется со скоростью и обеспечивается основными конденсаторами звена постоянного тока, которые заряжаются при включении питания ПЧ. При малых значения крутящего момента выходной ток может быть намного выше, чем входной, поскольку входной ток отражает только составляющую, создающую крутящий момент плюс некоторые гармоники, но не включает ток намагничивания. Ток намагничивания циркулирует между конденсаторами шины постоянного тока и двигателем. Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Помните, что в уравнении мы сравниваем входную и выходную мощности. Например, рассмотрим полностью нагруженный двигатель, вращающийся на низких оборотах. Входное напряжение номинальное, а выходное напряжение будет низким из-за низкой скорости вращения. Выходной ток в данном случае будет высокий из-за полной нагрузки на двигатель. А чтобы сбалансировать уравнение мощности, входной ток должен быть ниже выходного тока.
Узнать подробную информацию о частотных преобразователях, ознакомиться с производственной линейкой YASKAWA Вы можете у нашего партнера — ООО «КоСПа»
Или в соответствующем разделе преобразователя YASKAWA
Оригинал статьи: https://www.yaskawa.com/about-us/media-center/industry-articles-display?articleId=2167778
27.07.2017
www.chastotnik.pro
Проблемы компенсации реактивной мощности
Многие из нас знают преимущества компенсации реактивной мощности (разгружаем трансформатор, производственную сеть, коммутирующую аппаратуру и платим меньше за электроэнергию), и, в меру своих возможностей устанавливаем те или иные станции компенсации реактивной мощности (КРМ). Однако, может оказаться, что скомпенсировав реактивную мощность по низкой стороне Вам все равно приходится платить за РМ, хотя и значительно меньше.
В недоумении Вы обращаетесь к поставщику оборудования, к энергоснабжающим организациям, пытаясь разобраться в сложившейся ситуации. В результате Вы вспоминаете или Вам рассказывают, что не загруженный трансформатор имеет низкий косинус фи, и если коммерческий учет электроэнергии ведется по высокой стороне, то именно за низкий косинус не загруженного трансформатора Вам приходится переплачивать, несмотря на то, что на низкой стороне выполнены все мероприятия по КРМ. Что же делать в сложившейся ситуации?
Самый лучший, но, к большому сожалению, трудно выполнимый вариант – это перевести учет потребления электроэнергии на низкую сторону. Если такой вариант не проходит, то Вам придется компенсировать низкий косинус трансформатора по высокой стороне, а это дорого, но в большинстве случаев выбора не остается. Если оба варианта для Вас невыполнимы, а на предприятии имеется несколько трансформаторных вводов, то подключите все оборудование к одному вводу, максимально загрузив трансформатор, если это возможно.
Можно подключить компенсирующие конденсаторы непосредственно к выходным клеммам силового трансформатора перед станцией КРМ. Эти конденсаторы будут компенсировать только реактивную мощность трансформатора, однако такое техническое решение даст удовлетворительный результат только в случае постоянной (не изменяющейся) нагрузки трансформатора, что бывает очень редко. Если у Вас именно такой случай, то при выборе и подключении компенсирующих конденсаторов нужно быть очень внимательным, и вот почему.
На частном предприятии было остановлено производство, и силовой трансформатор, мощностью 400 кВА, использовался только для дежурного освещения и для работы котельной. Так как коммерческий учет потребления электроэнергии велся по высокой стороне, то к выходным зажимам трансформатора был подключен конденсатор 20 кВАр, который полностью компенсировал реактивную мощность трансформатора, однако получилась небольшая перекомпенсация (200 кВАр за месяц), за которую пришлось заплатить. Для исключения генерации реактивной энергии в сеть конденсатор 20 кВАр был заменен на 10 кВар, а через месяц пришел счет на 18000 кВАр перекомпенсации. Вот Вам и скомпенсировали, а все произошло из-за возникшего резонанса в контуре, состоящего из индуктивности трансформатора и емкости компенсирующего конденсатора.
Если компенсация РМ трансформатора «в лоб» не получилась, то можно исправить ситуацию, установив датчик тока по высокой стороне, а компенсатор по низкой. При таком техническом решении у Вас появляется возможность полной КРМ, в том числе и трансформатора.
Разобравшись со всеми нюансами, и скомпенсировав реактивную мощность, Вы продолжаете искать пути экономии электроэнергии. Одним из таких путей является внедрение энергосберегающих технологий на базе преобразователей частоты. Очень многие внедряют частотно-регулируемый электропривод на насосных станциях, вентиляционных, компрессорных, холодильных, вакуумных и т.д. установках и при этом экономят 25 – 40% электроэнергии.
К хорошему привыкают очень быстро и установленная мощность преобразовательной техники на Вашем предприятии с каждым годом увеличивается, и наступает такой момент, когда начинают греться конденсаторы компенсаторов реактивной мощности. Вы опять обращаетесь к поставщику станций КРМ, надеясь на то, что это просто некачественные конденсаторы. Однако конденсаторы окажутся хорошими, и Вы интуитивно почувствуете, что в Вашей сети завелись «черти», и Вы опять начинаете искать выход из создавшейся ситуации.
Одни посоветуют переделать станции КРМ, установив последовательно с конденсаторами подавляющие дроссели, другие предложат Вам отказаться от компенсации по низкой стороне и перейти на высокую, однако такие предложения не принесут ожидаемого результата, ведь они не устраняют причину возникновения этих неприятностей.
ПРОБЛЕМЫ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ ИЗ-ЗА ВЫСШИХ ГАРМОНИК
Информация к размышлению, любая выпрямительно-емкостная нагрузка (современные сварочные аппараты, преобразователи частоты, источники бесперебойного питания, промышленные и бытовые компьютеры и т.д.) генерируют в питающую сеть высшие гармоники. Механизм возникновения высших гармоник мы рассматривать не будем, а обращаем Ваше внимание на то, что их нужно подавлять в месте их возникновения. Способов подавления не так уж и много, это установка входных силовых дросселей, пассивных входных фильтров гармоник и активных фильтров.
Входные силовые дроссели, установленные в звене постоянного тока преобразователя частоты или на его входе улучшают форму входного тока и уменьшают уровень высших гармоник, генерирующим ПЧ в сеть. Однако входные силовые дроссели эффективны в том случае, когда установленная мощность преобразовательной техники составляет не более 20% от мощности трансформаторного ввода, если больше, то придется использовать входные фильтры гармоник или активные фильтры.
Входные пассивный фильтр гармоник, это полосовые LC-фильтры, параметры которых, как правило, рассчитаны на 5 и 7 гармоники. Это хорошее техническое решение, позволяющее получить коэффициент нелинейных искажений входного тока преобразователя частоты не более 10% или 5% в зависимости от модификации LC-фильтра.
Особого внимания заслуживают активные фильтры, которые в последнее время все чаще используются на предприятиях с большим количеством преобразовательной техники. Они могут программироваться на выборочное подавление любой гармоники до 25 включительно, или на какую-то полосу частот, при этом могут корректировать коэффициент мощности, а если проще, то компенсировать реактивную мощность.
Хочется обратить Ваше внимание на то, что практически никто не борется с высшими гармониками, которые приносят много неприятностей, пока «жаренный петух» не клюнет в одно место. Например, на одном из водоканалов все системы водоснабжения и водоотвода были автоматизированы с помощью частотно-регулируемого электропривода на базе статических преобразователей частоты. Потребители были довольны высоким качеством водоснабжения, а водоканал — приличной экономией электроэнергии, пока не внедрили автоматизированную систему коммерческого учета электроэнергии – АСКУЭ (АСКОЕ), которая на станции первого подъема начала показывать генерацию реактивной мощности в питающую сеть.
Начались «разборки» с привлечением технических специалистов облэнерго, ведь на насосной станции нет ни одного компенсирующего конденсатора, откуда же генерация РМ в сеть? В результате проверки облэнерго установило, что генерация РМ в сеть отсутствует, и рекомендовала заменить коммерческий счетчик электроэнергии. Гарантийная замена счетчика ничего не изменила, и водоканал попросил нас «разрулить» сложившуюся ситуацию.
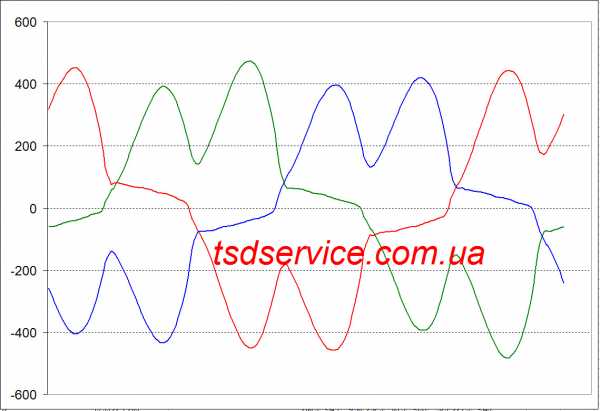 Наши измерения качества электрической энергии в точках подключения к сети электроснабжения с помощью сертифицированного в Украине и аттестованного «Укрметртестстандартом» прибором, так же не показали генерацию РМ в сеть. Однако хотим обратить Ваше внимание на осциллограмму тока, потребляемую насосной станцией с питающей сети. Так как форма тока не синусоидальна, то возникают высшие гармоники, которые изображены на второй осциллограмме, среди которых в «полный рост» видны пятая и седьмая гармоники.
Наши измерения качества электрической энергии в точках подключения к сети электроснабжения с помощью сертифицированного в Украине и аттестованного «Укрметртестстандартом» прибором, так же не показали генерацию РМ в сеть. Однако хотим обратить Ваше внимание на осциллограмму тока, потребляемую насосной станцией с питающей сети. Так как форма тока не синусоидальна, то возникают высшие гармоники, которые изображены на второй осциллограмме, среди которых в «полный рост» видны пятая и седьмая гармоники.
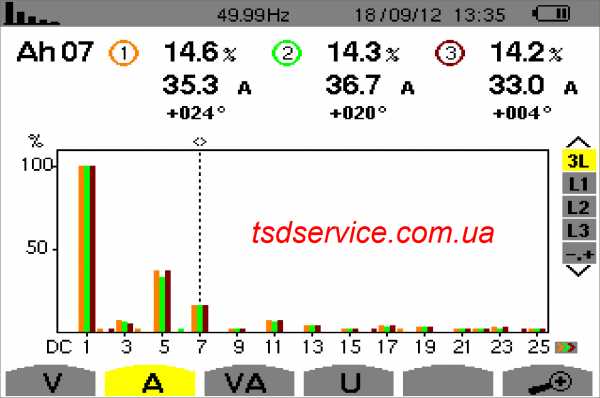
Ну и что? — спросите Вы. Да вообще-то и ничего, но теоретические и практические исследования говорят о том, что наличие высших гармонических составляющих напряжения и тока увеличивают погрешность измерения счетчиков электроэнергии до ± 13% — вот Вам и ответ, почему счетчик показывает генерацию реактивной мощности в сеть. А что же делать? — выполнять рекомендации, приведенные в первом абзаце этого раздела.
Коль речь зашла о погрешностях измерения, то для их нейтрализации на станциях компенсации реактивной мощности используются регуляторы, которые не измеряют ни напряжение, ни ток, ни косинус фи, а считывают и анализируют показатели коммерческого счетчика электроэнергии и подключают компенсирующие конденсаторы таким образом, что бы не было ни потребления, ни генерации РМ.
А теперь рекламная пауза: Ей, хлопці! Не візьмемо і не віддамо ні одного кВАрааа!!!
tsdservice.com.ua
Частотный преобразователь
Дмитрий Левкин
Частотный преобразователь, или преобразователь частоты — электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.
Частотный преобразователь небольшой мощности

Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
- Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.


Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
- Методы модуляции можно разделить на четыре основные группы:
- ШИМ — широтно-импульсная модуляция
- ПВМ — пространственно-векторная модуляция
- гармоническая модуляция
- методы переключения переменной частоты
Корни силовой электроники уходят к 1901 году, когда П.К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). Новые силовые полупроводниковые устройства всегда инициируют развитие новых топологий преобразователей [3].
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).
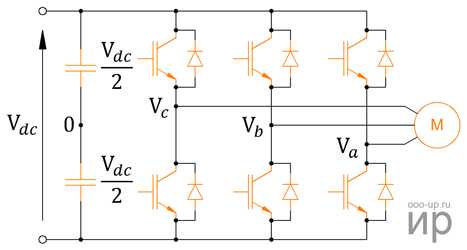
Схема двухуровневого инвертора напряжения
Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.
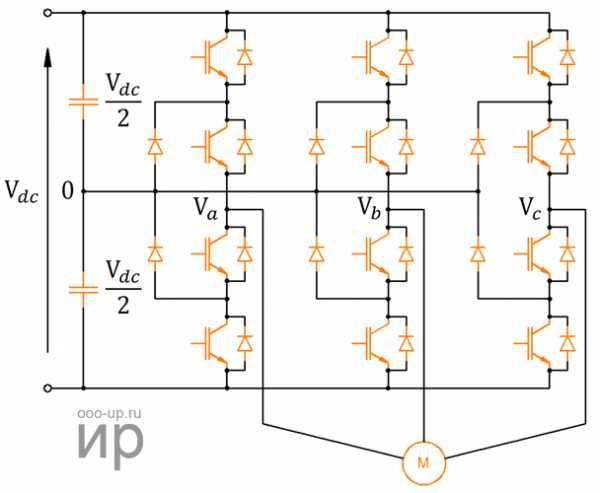
Схема трехуровневого преобразователя с фиксированной нейтральной точкой
- Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
- ГОСТ Р 50369-92 Электроприводы. Термины и определения.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.:International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, «High-Performance Motor Drives», IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.
Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge — CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь — высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.
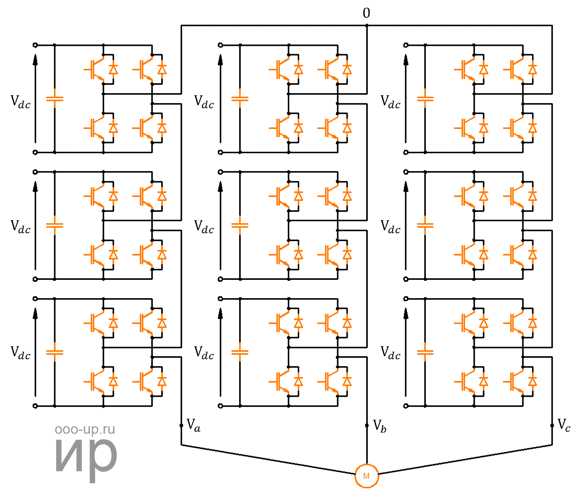
Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.

Фазное напряжение каскадного преобразователя
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.
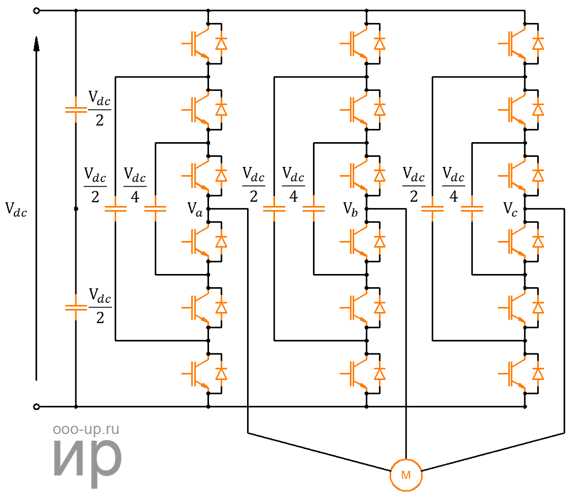
Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.
Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.
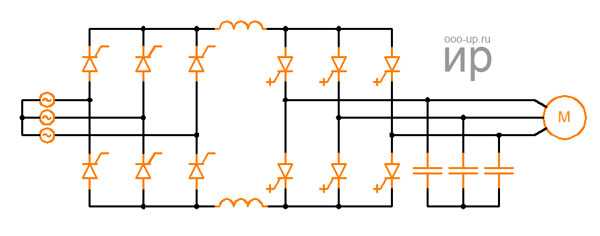
Схема инвертора тока с выпрямителем
Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка. Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.
Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) — возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.
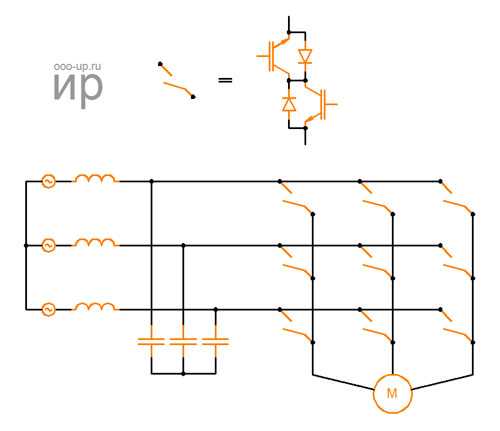
Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).
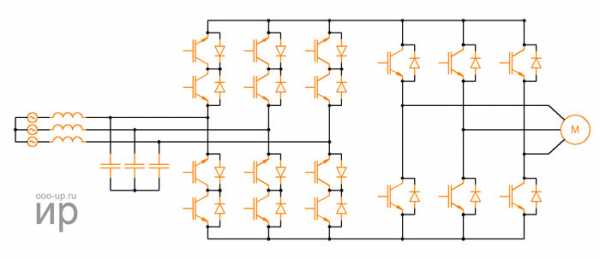
Схема непрямого матричного преобразователя
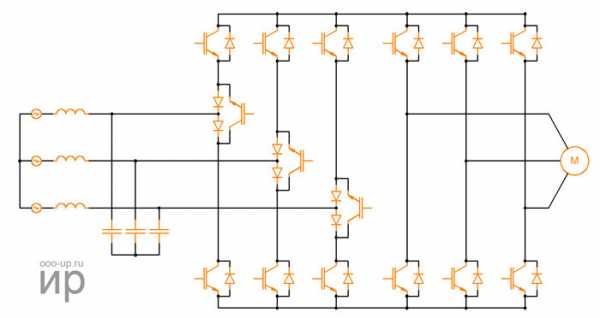
Схема разреженного матричного преобразователя
Библиографический список
engineering-solutions.ru
Компенсация реактивной мощности
 Компенсация реактивной мощности, или, если хотите, коррекция коэффициента мощности, в последнее время, становится все более востребованной. И это не удивительно, ведь цены на электроэнергию все время растут, и если раньше на некоторых предприятиях не очень-то обращали внимание на оплату за реактивную мощность, то сейчас возросшая оплата заставляет вспоминать о реактивной мощности и задумываться над тем, а стоит ли за нее платить. Независимо от того, знаем ли мы что-то о реактивной мощности или нет, но платить деньги за реактивную мощность — это просто расточительство. Даже при Советском Союзе, когда электроэнергия была практически бесплатной, и то, предприятия штрафовали за низкий cos ?, стимулирую тем самым компенсацию реактивной мощности.
Компенсация реактивной мощности, или, если хотите, коррекция коэффициента мощности, в последнее время, становится все более востребованной. И это не удивительно, ведь цены на электроэнергию все время растут, и если раньше на некоторых предприятиях не очень-то обращали внимание на оплату за реактивную мощность, то сейчас возросшая оплата заставляет вспоминать о реактивной мощности и задумываться над тем, а стоит ли за нее платить. Независимо от того, знаем ли мы что-то о реактивной мощности или нет, но платить деньги за реактивную мощность — это просто расточительство. Даже при Советском Союзе, когда электроэнергия была практически бесплатной, и то, предприятия штрафовали за низкий cos ?, стимулирую тем самым компенсацию реактивной мощности.
Не будем рассказывать почему компенсация реактивной мощности просто и эффективно экономит Ваши деньги, не будем рассказывать почему компенсация реактивной мощности разгружает Вашу промышленную сеть электроснабжения и увеличивает срок службы коммутирующей аппаратуры, а обращаем Ваше внимание на то, что очень многие торгующие организации предлагают устройства для компенсации реактивной мощности, и, в большинстве случаев, мы отдаем предпочтение более дешевым моделям, что в конечном итоге обходится для нас же дороже. Это совсем не значит, что необходимо покупать самые дорогие устройства компенсации реактивной мощности, просто нужно выбирать хорошие модели и за разумную цену. Как нужно выбирать? — читайте ниже.
Поставляя в Украину немецкие конденсаторы Electronicon нам просто грех не выпускать станции компенсации реактивной мощности, и, наш сервисный центр освоил выпуск таких станций. Используя проверенные и надежные комплектующие для наших автоматических устройств компенсации реактивной мощности мы добились того, что они дешевле аналогичных импортных, а иначе зачем и «огород городить»? — ведь мы их выпускаем в Украине. Если быть более точным, то к большому сожалению, в Украине мы только собираем станции компенсации реактивной мощности, ведь практически все комплектующие импортные. Жалко конечно, но кроме украинских проводов и металлоконструкций (шкафов) в надежных устройствах компенсации реактивной мощности больше украинского ничего не используем. Правда и китайские комплектующие, да простят наши китайские друзья, в своих разработках мы тоже не применяем.
КОМПЕНСАЦИЯ РЕАКТИВНОЙ МОЩНОСТИ — ВЫБОР КОМПЛЕКТУЮЩИХ
 Ну, а теперь немного конкретики, касающейся выбора комплектующих. Основным функциональным узлом любой станции компенсации реактивной мощности является блок конденсаторов. Конденсаторы должны быть хорошими (мы не говорим самыми лучшими — это от лукавого), потому, что они должны верой и правдой работать не год и не два, а десятки лет в наших украинских электросетях, а ведь все мы знаем, какие там «черти» водятся. Конденсаторы Electronicon — это хорошие немецкие конденсаторы, а так, как мы их поставляем в Украину, то в наших компенсаторах реактивной мощности они будут дешевле, нежели у тех, кто купит их у нас для производства аналогичных компенсаторов.
Ну, а теперь немного конкретики, касающейся выбора комплектующих. Основным функциональным узлом любой станции компенсации реактивной мощности является блок конденсаторов. Конденсаторы должны быть хорошими (мы не говорим самыми лучшими — это от лукавого), потому, что они должны верой и правдой работать не год и не два, а десятки лет в наших украинских электросетях, а ведь все мы знаем, какие там «черти» водятся. Конденсаторы Electronicon — это хорошие немецкие конденсаторы, а так, как мы их поставляем в Украину, то в наших компенсаторах реактивной мощности они будут дешевле, нежели у тех, кто купит их у нас для производства аналогичных компенсаторов.
Вторым важным функциональным узлом является блок контакторов, которые подключают конденсаторы непосредственно к электросети. Контакторы тоже должны быть специализированными и надежными, ведь они должны очень «четко» работать при частых коммутациях, которые неизбежны в компенсирующих станциях. Кое-кто пытается использовать обычные контакторы для удешевления устройства, и даже рассказывает о том, что такие устройства уже некоторое время успешно работают. Не покупайте таких станций компенсации
реактивной мощности, ведь при прямом подключении конденсатора к сети протекают большие токи заряда, а для конденсатора это все равно, что нам стучать молотком по голове — долго не выдержишь!
О тиристорных ключах, используемых для включения секций конденсаторов в устройствах компенсации реактивной мощности, здесь рассказывать не будем. Такие устройства дороже устройств с контакторами и их заказывают очень редко, когда требуется высокое быстродействие устройств компенсации реактивной мощности, например, в морских портах, где работает много подъемных кранов, на предприятиях, где работает много сварочных аппаратов и т. д. На таких объектах обычные устройства просто не успевают реагировать на быстрые изменения коэффициента мощности. Следует иметь в виду, что и КПД компенсаторов с тиристорами ниже нежели с контакторами, ведь на тиристоре, все-таки, «упадет» ни много, ни мало, а 1,5 В.
Что касается контроллеров для автоматических устройств компенсации реактивной мощности, то выбор есть, даже украинские контроллеры рекламируют и говорят, что они лучше импортных. Мы присматриваемся к ним, ведь комплектация-то импортная, а программисты в Украине одни из лучших в мире — этого не отнимешь.
КОМПЕНСАЦИЯ РЕАКТИВНОЙ МОЩНОСТИ И ВЫСШИЕ ГАРМОНИКИ
 Немного о выборе мощности компенсаторов. Многие поставщики устройств коррекции коэффициента мощности предлагают заполнить опросный лист, по результатах которого определяют требуемую мощность такого устройства не выезжая на объект. У нас совсем другой подход к решению этой задачи. Мы приезжаем к Вам и бесплатно производим комплексную проверку параметров производственного электроснабжения с помощью современнейшей аппаратуры. По результатам мониторинга электросети мы вместе с Вами выбираем оптимальное решение для компенсации реактивной мощности. Мы считаем, что такой подход к разработке и изготовлению станций компенсации реактивной мощности более правильный, и вот почему.
Немного о выборе мощности компенсаторов. Многие поставщики устройств коррекции коэффициента мощности предлагают заполнить опросный лист, по результатах которого определяют требуемую мощность такого устройства не выезжая на объект. У нас совсем другой подход к решению этой задачи. Мы приезжаем к Вам и бесплатно производим комплексную проверку параметров производственного электроснабжения с помощью современнейшей аппаратуры. По результатам мониторинга электросети мы вместе с Вами выбираем оптимальное решение для компенсации реактивной мощности. Мы считаем, что такой подход к разработке и изготовлению станций компенсации реактивной мощности более правильный, и вот почему.
Во-первых. Ни один опросный лист, ни один самый «крутой» расчет не скажет какой на Вашем предприятии реальный коэффициент мощности и как он изменяется в процессе производственного цикла. Это все равно, что лечить больного по телефону — ведь не обследовав конкретный объект реально не знаешь: какие, сколько, где и как правильно и эффективно установить устройства компенсации реактивной мощности.
 Во-вторых. Широко используемые преобразователи частоты, мощные выпрямители с емкостной нагрузкой, источники бесперебойного питания, современные сварочные аппараты, компьютерная нагрузка и т. д. потребляют с питающей сети несинусоидальный ток. Это приводит к тому, что такие устройства генерируют в сеть непарные и не кратные трем высшие гармоники — 5, 7, 11, 13, 17,19 и т. д. Особенно «достают» 5 и 7 гармоники, «благодаря» которым при подключении компенсатора реактивной мощности в сети возникает резонанс на частотах 250… 350 Гц и выше. На это обстоятельство необходимо обращать самое пристальное внимание при разработке и изготовлении устройства, что бы не попасть в неприятное положение. Это еще раз подтверждает необходимость мониторинга Вашей промышленной сети.
Во-вторых. Широко используемые преобразователи частоты, мощные выпрямители с емкостной нагрузкой, источники бесперебойного питания, современные сварочные аппараты, компьютерная нагрузка и т. д. потребляют с питающей сети несинусоидальный ток. Это приводит к тому, что такие устройства генерируют в сеть непарные и не кратные трем высшие гармоники — 5, 7, 11, 13, 17,19 и т. д. Особенно «достают» 5 и 7 гармоники, «благодаря» которым при подключении компенсатора реактивной мощности в сети возникает резонанс на частотах 250… 350 Гц и выше. На это обстоятельство необходимо обращать самое пристальное внимание при разработке и изготовлении устройства, что бы не попасть в неприятное положение. Это еще раз подтверждает необходимость мониторинга Вашей промышленной сети.
В-третьих. Если установленная мощность преобразователей частоты и вышеупомянутых устройств с выпрямительно-емкостной нагрузкой будет соизмерима с мощность трансформатора, то может оказаться, что вопрос компенсации реактивной мощности придется решать комплексно. Это значит, что сначала придется улучшить форму потребляемого тока с помощь входных фильтров гармоник, после чего «заняться» коррекцией коэффициента мощности, если она понадобится.
И в заключение несколько слов о влиянии высших гармоник на точность измерения счетчиков активной и реактивной мощности. Наукой и практикой установлено, что точность измерения электроэнергии определяют более 30 составляющих, 20 из них – это дополнительные погрешности. Установлено, что при использовании высокоточных способов измерения (трансформаторов тока и напряжения, класса точности 0,2) в нормальных условиях можно достичь наименьшей погрешности измерения электроэнергии ± 0,5%. При той самой аппаратуре, при самых неблагоприятных условиях измерения, за счет влияния дополнительных погрешностей, суммарная погрешность увеличится до ± 3,5%.
При использовании счетчиков, трансформаторов тока и напряжения класса точности 1,0 минимальная погрешность в нормальных условиях измерения будет составлять ± 2,2%, а в самых неблагоприятных уже ± 13,3%. Дополнительные погрешности измерения, возникают за счет высших гармонических составляющих напряжения и тока в сетях электроснабжения.
Наличие высших гармонических составляющих тока и напряжения приводит не только к увеличению погрешности измерения как активной, так и реактивной мощности, но и к увеличению потерь в стали трансформатора ввода, к разогреву конденсаторов компенсирующих устройств, к сбоям электронной аппаратуры и т.д. Поэтому вопросы улучшения формы входного тока, так и вопросы компенсации реактивной мощности очень актуальны на сегодняшний день.
Что-то большая статья получилась, но как-то без рекламы, и, что бы восполнить этот пробел, пользуясь рекламной терминологией, мы Вам говорим: «Обращайтесь к нам, и Вы будете приятно удивлены нашими ласковыми ценами на устройства компенсации реактивной мощности». А если без рекламы, то мы Вам предлагаем не кота в мешке, а надежные станции компенсации реактивной мощности за разумную цену.
tsdservice.com.ua
Частотный преобразователь и входная сеть питания
ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ И ВХОДНАЯ СЕТЬ ПИТАНИЯ
В развитых странах, при расчетах за электроэнергию, учитывают не только потребленную активную и реактивную энергию, а и уровень высокочастотных гармоник, которые генерирует оборудование в сеть питания. Что это за гармоники, откуда они берутся и почему за них нужно платить?
Частотный преобразователь, который сегодня выпускается для частотно-регулированного электропривода — это частотный преобразователь со звеном постоянного тока. В нем напряжение сети питания сначала выпрямляется, а потом фильтруется с помощью электролитических конденсаторов, которые собственное и является звеном постоянного тока. Из сети питания, при этом, потребляется ток, форма которого существенно отличается от синусоиды (на рисунке красная кривая), вследствие чего в сети питания начинают протекать токи 5, 7, 11, 13, 17, 23, 25 и т.д. гармоник.
Эти токи разогревают сердечник (магнитопровод) силового трансформатора ввода сети питания, разогревают конденсаторы на компенсирующих подстанциях и отрицательно влияют на работу потребителей электрической энергии, подключенных к этому вводу. На фотографии видно, как влияют на работу компенсаторов реактивной мощности гармоники сети питания, если их наличие не принимать во внимание.
Учитывая это, некоторые производители в конце инструкции по эксплуатации маленьким шрифтом пишут, что мощность такой преобразовательной техники должна быть не более 10% от мощности трансформаторного ввода, а электролитические конденсаторы звена постоянного тока необходимо менять через каждые 5 лет. Т.е., если мощность Вашего ввода, например, 100 кВА, то частотный преобразователь — 10 кВА. Это понятно, чем меньшая мощность, тем меньший уровень гармоник и меньшее их влияние на входную сеть. А при чем здесь электролитические конденсаторы звена постоянного тока, которые необходимо менять через каждые 5 лет? Оказывается, что ток, который потребляется из сети питания, есть не что иное, как ток заряда электролитических конденсаторов. При такой форме тока (на рисунке красная кривая) электролитические конденсаторы работают с перегрузкой, которая уменьшает их ресурс работы. Если, при этом, Ваш частотный преобразователь продолжительное время работает на номинальной мощности (самый тяжелый режим работы для конденсаторной батареи), то электролитические конденсаторы могут выйти из строя значительно раньше упомянутых 5 лет. На фотографии электролитический конденсатор проработал меньше года.

Чтобы уменьшить уровень гармоник в сети питания и во избежание подобных «взрывов» необходимо улучшить форму входного тока. Если частотный преобразователь снабдить входными силовыми дросселями, то форма тока (на рисунке голубая кривая) станет значительно лучше по сравнению с красной кривой. При этом электролитические конденсаторы будут работать без перегрузок, уровень гармоник в сети питания значительно уменьшится и суммарная установленная мощность преобразовательной техники может составлять 50-60% от мощности трансформаторного ввода. Если это так, а это именно так, то почему частотный преобразователь не комплектуют такими дросселями? Комплектуют, но не все производители, так как они составляют 20-30 % массогабаритных показателей преобразователя частоты, а соответственно и цены. Выбирая, частотный преобразователь обратите внимание на то, что „легкий” преобразователь — это не всегда преимущество, а скорее наоборот.
Компания Danfoss (Данфосс), которая первая в мире разработала и выпустила серийный частотный преобразователь, которая и на сегодняшний день является мировым лидером в области преобразовательной техники и частотно — регулированного электропривода, каждый свой частотный преобразователь снабжает входными силовыми дросселями, которые конструктивно вмонтировано в корпус. Такое техническое преимущество выгодно отличает частотный преобразователь Danfoss (Данфосс) от преобразователей, у которых отсутствуют входные дроссели и на это обстоятельство следует обращать внимание при их выборе.
tsdservice.com.ua
РЕАКТИВНАЯ МОЩНОСТЬ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ В УСТАНОВИВШИХСЯ РЕЖИМАХ
ЭНЕРГОСБЕРЕГАЮЩИЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД
3.2.1. Исходные положения
Как было сказано в гл. 2, одним из важных критериев, определяющих результативность использования разных типов электропривода, является оценка его эффективности как потребителя электроэнергии.
Особое значение этот показатель приобретает при работе потребителей (двигателей) на переменном токе, что и является предметом нашего рассмотрения.
Мерой эффективности, определяющей уровень реактивной энергии в цепях переменного тока, служит coscp потребителя, а при питании симметричным несинусоидальным периодическим напряжением, что характерно для асинхронных электроприводов с полупроводниковыми преобразователями, для оценки значения реактивной энергии пользуются, как было сказано в гл. 2, коэффициентом мощности км. Соотношения, приведенные в [32, 73] для цепи однофазного переменного типа, показывают, как влияет реактивная составляющая полной мощности на ток, а следовательно и на потери на активных сопротивлениях источника, питающих линий и приемника. Действительно, при отсутствии реактивной составляющей, что имеет место при питании постоянным током или наличии в цепях только активных сопротивлений, при одной и той же средней мощности за период Рср = UIcoscp при данном напряжении U в системе протекала бы только активная составляющая тока /а = /сos<p. Следовательно, потери в электрической системе (источник напряжения, линии электропередач, приемник), определяемые полным током / при заданной активной мощности Р = Рср, можно рассчитать по формуле
(3.66)
или
(3.67)
где ДРП. Т — потери при передаче активной мощности на постоянном токе.
Как следует из формулы (3.67), в цепях переменного тока потери возрастают в l/cos2cp, и, например, при coscp = 0,8 потери увеличатся в 1,56 раза. Таким образом, при анализе цепей, по которым протекает синусоидальный ток, coscp рассматривается как оценка экономичности потребления активной мощности и определяет долю реактивной мощности в полной потребляемой мощности.
Более сложная картина при оценке реактивной мощности наблюдается при питании потребителей несинусоидальным переменным током, что происходит при управлении асинхронными двигателями от полупроводниковых преобразователей. Поэтому, рассматривая проблемы снижения энергопотребления и уменьшения потерь в разных асинхронных электроприводах, целесообразно проанализировать потребление реактивной мощности регулируемыми электроприводами (в гл. 2 были изложены лишь общие соображения). Этот показатель определяет энергетическую
эффективность работы электроприводов, их влияние на питающую сеть и электромагнитную совместимость управляемых полупроводниковых асинхронных электроприводов с питающей сетью.
Дуговые электрические печи
Как было показано в подразд. 4.2.7, применение частотно-регулируемых электроприводов перемещения электродов в сочетании с системой управления, выполненной на современной элементной базе, может дать значительную экономию энергии на дуговых сталеплавильных печах. …
Подъемно-транспортные механизмы
В последнее время наметилась тенденция к использованию в подъемно-транспортных механизмах частотно-регулируемых асинхронных электроприводов. Рассмотрим основные преимущества перехода к частотному регулированию на примере электроприводов козлового контейнерного крана типа ККК20-25-8.5-5 грузоподъемностью 20 …
ЭФФЕКТИВНОСТЬ ИСПОЛЬЗОВАНИЯ ЧАСТОТНОРЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ В УСТРОЙСТВАХ НА ПРОМЫШЛЕННЫХ ОБЪЕКТАХ
5.3.1. Поршневые насосы и компрессоры Объектом модернизации является компрессорная станция сжатого воздуха, предназначенная для подачи сжатого очищенного воздуха давлением 7…8 атм на разные объекты. Компрессорная станция состоит из шести компрессоров …
msd.com.ua
Основные способы управления частотным электроприводом
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Содержание:
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. Транзисторы с изолированным затвором (IGBT) путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.
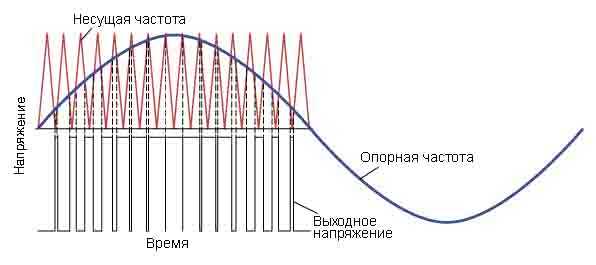
В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Способ управления U/F
Управление вольт-на-герц, наиболее часто называемое как U/F, пожалуй, самый простой способ регулирования. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода (но рекомендовано). Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/F довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
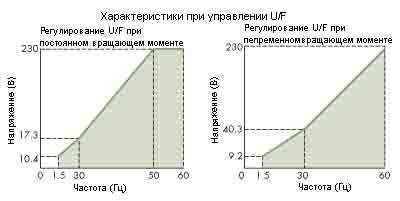
Модель с постоянным моментом вращения имеет постоянный вращающий момент во всем диапазоне скоростей при одинаковом соотношении U/F. Модель с переменным соотношением вращающего момента имеет более низкое напряжение питания на низких скоростях. Это необходимо для предотвращения насыщения электрической машины.
U/F — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/F без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/F.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/F составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/F определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/F одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/F предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.

Способ управления U/F с энкодером
Если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/F.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/F минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/F. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.

Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.
Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания (Id) и крутящего момента (Iq).
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания (Id) и крутящего момента (Iq). Для достижения максимальной производительности, преобразователь частоты должен держать Id и Iq разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
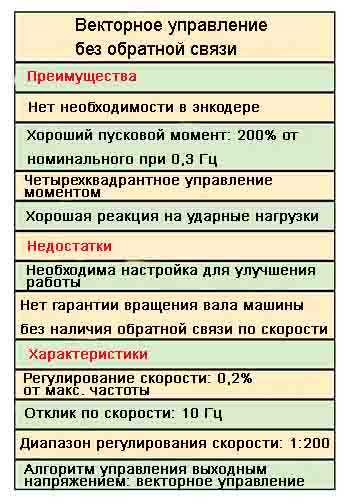
В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
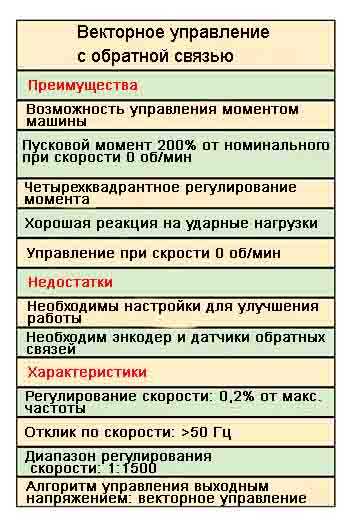
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
elenergi.ru