Асинхронный серводвигатель (сервомотор). Частотное управление
Данный вид двигателей широко известен своей технологичностью и непритязательностью к условиям работы, что важно для условий промышленного производства со всеми его особенностями. Небольшая масса, скромные габариты и привлекательная себестоимость, лёгкость обслуживания выгодно выделяют его среди другого электрооборудования. Хотя в 90-е годы началась активная замена синхронными серводвигателями, но асинхронный тип по-прежнему занимает свою долю на предприятиях и массово используется в промышленности.
На рисунке схематичное изображение асинхронного двигателя.
Асинхронный двигатель с точки зрения математики
Полное описание нелинейной системы с элементами, которые взаимно перемещаются выходит довольно объемным. Физические явления кажутся простыми, напряжения, токи и потокосцепления являются изменяемыми векторными характеристиками. Это частота, фаза и амплитуда. Изучает работу такого оборудования теория электрических машин.
Асинхронные машины обладают заметной нелинейностью. Магнитный поток связан с намагничивающим током. Из-за переменного насыщения магнитной цепи сопротивления роторной цепи определяются частотой и температурой.
Для определения нагрузки асинхронного электродвигателя, в частном случае серводвигателя, нужно кроме сопротивлений схемы замещения знать и другие переменные, а именно частоты, напряжения и скольжения.
Для расчета и дальнейшего изучения и прогнозирования режима работы такого оборудования и электроприводов на этой базе требуется знать математическое выражения зависимостей скольжения от внутренних параметров и режимов его работы.
Тормозные режимы работы
При частотно-управляемом торможении – этот режим работы не уступает по важности двигательному. Возможно использование механики, тем не менее, частотное управление даёт возможность производить торможение привода за счёт электричества. Что в значительной степени выгоднее.
Асинхронный серводвигатель можно использовать в режиме двигателя и в 3-х режимах торможения, которые различаются направлением потоков энергии.
В режиме двигателя мощность передаётся от источника электроэнергии на вал двигателя. Магнитное поле вращается, дублируя направление, что и вал машины. Скорость вращения вала меньше скорости вращения поля.
Как регулировать напряжение.
Для управления асинхронными электродвигателями, регулировку напряжения статора в чистом виде не производят. Напряжение статора меняют вместе с частотой напряжения подаваемого на статор. Основные виды характеристик U/F и U/F2. Вид характеристики, по которой будет управляться двигатель, выбираются в преобразователе частоты или сервоприводе.
Для формирования синусоидального тока статора обычно используются векторный и скалярный способы формирования напряжения. Наиболее выгодным оказывается векторный режим, который позволяет создать б`ольшую амплитуду выходного напряжения, чем скалярный.
Когда мы управляем напряжением статора, то управляем скорее не крутящим моментом, а больше статическим запасом крутящего момента.
www.remontservo.ru
Серводвигатели – синхронные и асинхронные
Для динамичных и точных сервоприводных систем у нас тоже есть модульная система двигателей. Выберите из трех синхронных и одной асинхронной серий свой оптимальный серводвигатель: компактный, малоинерционный и мощный. Множество типоразмеров и вариантов конструктивной длины обеспечивают широкую сферу применения и надежный пусковой момент.
Что такое серводвигатели?
 Серводвигатель – это двигатель, который позволяет контролировать точное положение вала двигателя, а также частоту вращения и/или ускорение. Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель, синхронный двигатель или двигатель постоянного тока. То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Серводвигатель – это двигатель, который позволяет контролировать точное положение вала двигателя, а также частоту вращения и/или ускорение. Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель, синхронный двигатель или двигатель постоянного тока. То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие серводвигатели существуют?
Серводвигатели можно разделить на синхронные и асинхронные. Но это всегда привод, работающий в условиях электронного регулирования положения, скорости или момента – либо комбинации этих параметров. При этом предъявляются очень высокие требования к динамике, диапазонам регулирования и/или к точности движения.
Наше предложение: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигатели подходят для применения в таких системах, где большие внешние моменты инерции нужно перемещать в установках и машинах, обеспечивая высокую надежность регулирования. Для этого SEW-EURODRIVE предлагает в серии двигателей DRL.. соответствующие решения для привода.
Синхронные серводвигатели
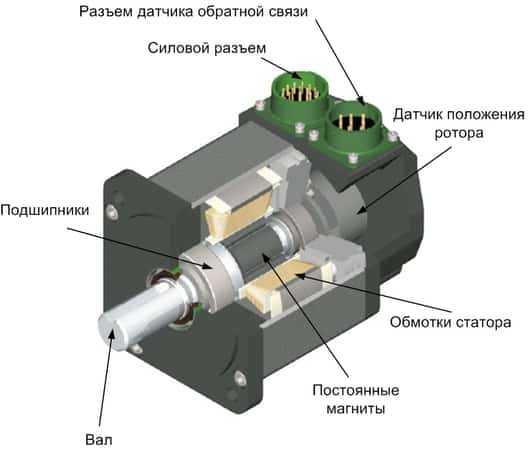
Синхронные серводвигатели – это приводы, в которых ротор с помощью закрепленных на нем постоянных магнитов синхронно приводится в движение вращающимся полем в статоре. Синхронный двигатель вращается синхронно подаваемой частоте вращающегося поля.
Этот вариант привода работает от преобразователя частоты, который обеспечивает подходящий, управляемый трехфазный ток. Для этого в ассортименте SEW-EURODRIVE есть различные исполнения. Оптимизированные серводвигатели серии CMP.. можно в зависимости от применения адаптировать к высокой динамике или высоким нагрузкам. Классические сферы применения – пищевая промышленность, строительство, автомобилестроение, упаковочная техника и деревообработка.
Основной особенностью синхронных серводвигателей серии CM..являются оптимальные характеристики регулирования, высокий вращающий момент и динамика. Эти двигатели идеально подходят для применения в логистике, например в качестве приводов портальных подъемников или стеллажных кранов-штабелеров.
www.sew-eurodrive.ru
Принцип работы сервопривода, что такое сервопривод
Сервопривод – это привод, предназначенный для осуществления контроля (угол поворота вала, скорость вращения/движения и так далее) над различными объектами, находящимися в постоянном движении. Контроль производится в зависимости от заданных ему параметров извне.
 Рисунок 1. Сервопривод
Рисунок 1. Сервопривод
Данный механизм получил достаточно широкое применение в различных промышленных сферах. Например, чаще всего его можно увидеть в конструкциях станков/машин для создания таких материалов/предметов и их обработки как:
- Упаковки и бумага;
- Листовой металл;
- Обработка материалов;
- Транспортное оборудование;
- Стройматериалы.
Также они могут использоваться в управляющих элементах механических систем (заслонка/задвижка, багажник автомобиля и тому подобные механизмы). Сервопривод очень полезен, так как позволяет поддерживать необходимый вам параметр.
Устройство
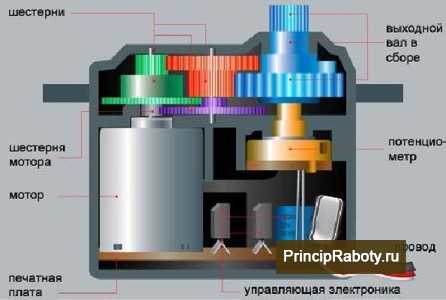 Рисунок 2. Устройство сервопривода
Рисунок 2. Устройство сервоприводаСервопривод включает в свой состав такие элементы как:
- Приводной механизм – к примеру, это может быть электромотор. Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент;
- Датчики – осуществляют контроль над необходимыми параметрами. Могут быть предназначены для отслеживания положения, усилия, поворота угла или скорости вращения объекта;
- Блок управления – немало важный элемент, так как именно благодаря ему происходит поддержание требуемых параметров в автоматическом режиме;
- Блок питания – питает данный механизм.
Интересно, что самый простой управляющий блок чаще всего создаётся с использованием схемы сравнений значений на датчике и необходимых значений при подаче напряжения определённой полярности на привод.
Виды
Сервоприводы могут быть произведены в самых различных комплектациях. Эти устройства разделяют по принципу движения:
Вращательное
Представлено двумя вариациями: синхронной и асинхронной. Синхронный вариант помогает задать высокоточные параметры скорости вращения, углов поворота и ускорения. По сравнению с асинхронным скорость набирают быстрее, поэтому и стоят больше;
Асинхронный привод отличается способностью поддержания с большой точностью необходимой скорости даже в условиях низких оборотов.
Линейное
Также делится на два варианта: плоские и круглые. Двигатели данного типа развивают достаточно высокое ускорение (70 метров в секунду).
Ещё их выделяют по способу действия:
- Электромеханические механизмы – формирование движений происходит за счёт электродвигателя с редуктором;
- Электрогидромеханические – у них любое движение создаётся с участием системы поршня-цилиндра. В сравнении с электромеханическим приводом они обладают отличительно высоким быстродействием.
Параметры
Абсолютно любой сервопривод классифицируется по следующим параметрам:
Поворотная скорость представляет собой конкретный временной промежуток, необходимый для изменения позиции вала и зависима от определённого напряжения.
Поворотный угол выходного вала. Обычно этот параметр равен 180, 360.
Крутящий момент является самым важным параметром работы механизма и регулируется в зависимости от напряжения.
Управление сервопривода зависит от его типа – цифровой он или аналоговый.
Питание. Чаще всего в моделях используют напряжение, варьирующееся от 4.8 до 7.2 вольт.
Размер. По этому параметру приводы делят на микро-, стандартные и большие (существуют и другие размеры, но эти самые распространенные).
Принцип работы сервопривода
Рисунок 3. Принцип работы сервопривода
Движение редукторного выходного вала, который связан сервоприводом с шестернями, происходит за счёт работы электродвигателя. Для регулирования оборотов предназначен редуктор. Для управления необходимыми механизмами вал соединяется непосредственно с ними.
Его положение контролирует специальный датчик (на них основано всё устройство), который преобразует угол поворота в электро-сигналы. Такой датчик носит название энкодера. Во время поворота бегунка сопротивление энкодера изменяется. Это изменение пропорционально зависимо от угла поворота датчика. Благодаря этому принципу работы механизм можно зафиксировать в нужной позиции.
Для поддержания отрицательной обратной связи используется электронная плата, которая обрабатывает сигналы, приходящие от энкодера. Она сравнивает параметры и определяет запускать или остановить электродвигатель.
Управление
Для того чтобы серводвигатель мог функционировать в нём используют специальную систему, основанную на G-кодах. Упомянутые коды представлены набором управляющих команд, которые заложены в программе.
Например, в системе ЧПУ сервопривод контактирует с инверторами, способными изменять напряжение, которое соответствует входному, в обмотке электромотора.
Вся система серводвигателя управляется/контролируется блоком управления, из которого поступают различные команды, например, передвижения по оси Х или У. После подачи команды в инверторе создаётся определённое напряжение, питающее привод. Затем серводвигатель начинает своё круговое движение, связанное с главным исполнительным элементом механизма и энкодером.
Энкодер создаёт множество импульсов, которые подсчитываются блоком, осуществляемыми управление устройством. Для каждой позиции исполнительного элемента в программе установлено определённое количество импульсов. Так под их влиянием либо подаётся напряжение на моторчик, либо прекращается.
Преимущества и недостатки
Приятной особенностью сервоприводов является их достаточно малый размер и вес, что позволяет устанавливать их в различные конструкции с лёгкостью. Также они отличаются своей почти полностью бесшумной работой, что очень важно при использовании данных устройств на определённых участках. Любой сервопривод можно настроить персонально под свои конкретные задачи.
Благодаря сервоприводу можно осуществлять управление с отличительной большой точностью и стабильностью.
Из недостатков выделяется только сложность в их настройке и стоимости.
Подключение
 Рисунок 4. Подключение сервопривода к системе Arduino
Рисунок 4. Подключение сервопривода к системе Arduino
Подключение сервопривода осуществляется за счёт проводников в количестве трёх штук. Два проводника используются для подачи питания на электромотор, а оставшийся необходим для передачи сигналов от блока управления, которые приводят вал в нужную позицию.
Стоит отметить, что для того чтобы снизить вероятность огромных динамических нагрузок, которым может подвергаться электромотор, необходимо осуществлять как плавный разгон мотора, так и его торможение. Для этой цели создаются и используются более высокие по сложности микроконтроллеры, которые обеспечивают высокую точность в контроле и управлении положением рабочей детали.
Шаговый сервопривод
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:
Проголосовавших: 3 чел.
Средний рейтинг: 5 из 5.
principraboty.ru
Асинхронный серводвигатель. Как это работает? Цикл ремонт
Асинхронные серводвигатели получили широкую известность за свою непритязательность к условиям работы и технологичность. Обладают небольшой массой, скромными габаритами и привлекательной себестоимостью, легки в обслуживании. Такое электрооборудование выгодно выделяется. В 90-е годы начинается активное применение синхронных сервомоторов, но и сейчас асинхронный серводвигатель сохраняет свою долю в массовом использовании, особенно в промышленности.Более углубленное изучение нелинейных систем элементы которых перемещаются друг относительно друга было бы очень долгим. Токи, потокосцепления, напряжения представляют собой изменяемые векторные величины. Они называются частота, амплитуда и фаза. Всё это изучается в теории электрических машин.
Асинхронным двигателям свойственна значительная нелинейность. Магнитный поток и намагничивающий ток связаны между собой. Сопротивления роторной цепи определяются температурой и частотой.
Чтобы определить нагрузку асинхронного серводвигателя, требуется помимо сопротивлений схемы замещения ещё знать и другие переменные. Потребуются напряжения, частоты, скольжения.
Чтобы выполнять дальнейшие расчёты с изучением и прогнозированием режимов работы следует знать математические выражения зависимости скольжения и внутренних параметров, а также режимов его работы.
Для частотно-управляемого торможения тормозной режим работы так же важен как двигательный. Допускается применять механику, при этом частотное управление позволяет осуществлять торможение привода с помощью электричества, а это во многом выгоднее.
Асинхронный серводвигатель возможно применять в качестве двигателя, либо в трёх режимах торможения. Эти три режима различаются между собой тем как движутся потоки энергии. У них разное направление.
Режим двигателя предполагает передачу мощности от источника электроэнергии к валу двигателя. Магнитное поле при этом вращается и дублирует направление вала машины. Скорость вращения поля больше скорости вращения вала.
Чтобы управлять асинхронным серводвигателем, не производят регулировку напряжения статора, вместо этого, его(напряжение) меняют вместе с частотой напряжения, которое подаётся на статор. При этом основными параметрами являются U/F и U/(F в квадрате). В преобразователе частоты или сервоприводе выбирается вид характеристики по которой управляется серводвигатель.
Чтобы создать синусоидальный ток статор применяют скалярный и векторный способ формирования напряжения. Самым выгодным является векторный режим. Он даёт возможность получить увеличенную амплитуду входного напряжения, по сравнению со скалярным.
Управление напряжением статора ведёт больше не к регулированию крутящего момента, а скорее к изменению статического запаса крутящего момента.
Дополнительно планирую рассмотреть ремонт серводвигателей в домашних условиях и процесс работы в специализированных организациях.
fishki.net
Серводвигатель — характеристики, конструкция
Сервопривод – это электронная система “следящего” привода, которая гарантирует динамичные, высокоточные процессы перемещения и имеет отличную повторяемость при широком диапазоне регулировки скорости.
Сервоприводы относятся к наиболее высокотехнологичной области электрического привода. В машиностроении они играют, в большинстве случаев, второстепенную роль. Пневматический и гидравлический приводы либо асинхронные двигатели с постоянной скоростью применяются лишь при больших моментах в качестве основного привода.
 Конструкция серводвигателя
Конструкция серводвигателяСегодня, когда автоматизация проникла абсолютно во все области машиностроения, преобладают электроприводы, и механика автомашин стала на порядок легче в силу внедрения передовых приводов взамен существующих.
Прогресс в электронике и возникновение новейших электротехнических материалов скорректировали обстановку в области сервопривода. Последние достижения разрешают компенсировать сложность управления приводом переменного тока посредствам применения передовых микроконтроллеров и высокоактивных силовых транзисторов. Мощные постоянные магниты, сделанные из сплавов неодим-ферро-бора и благодаря их высочайшей энергоемкости, значительно улучшили свойства синхронного мотора с магнитами на роторе при одновременном понижении массогабаритных характеристик. В результате улучшились динамические свойства привода при понижении его габаритов. постоянного тока.
В настоящее время сервоприводы используются в высокопроизводительном оборудовании в таковых отраслях как создание напитков, упаковки, строительных материалов; в подъемно-транспортной технике; полиграфии. Имеется тенденция к увеличению части сервоприводов в деревообрабатывающей и пищевой индустрии.
Главным причиной внедрения сервоприводов считается не только их высочайшая динамика, но и вероятность получения высокостабильного управления, широкий диапазон регулировки скорости, помехоустойчивость, небольшие габариты и вес. Благодаря передовым цифровым технологиям, сервоприводы сегодня применять гораздо проще, нежели несколько лет назад.
Цифровые технологии дают широкий выбор нацеленных на особое использование возможностей, большое обилие приборов связи с объектами и возможность применять индивидуальный компьютер для контролирования, оптимизации и авто настройки привода.
Характеристики сервоприводов
Для сервоприводов отличительны следующие технические характеристики:
- регулирование скорости и момента;
- диапазон регулировки скорости более 1:1000;
- высокая точность поддержания определенной скорости на валу мотора до 0,01%;
- точность укрепления позиции по валу мотора менее ± 10;
- малогабаритные размеры и небольшой масса;
В настоящее время сервопривод занимает значительную нишу на рынке электронных “следящих” приводов. Индустрии требуются все более динамичные, малогабаритные, надежные и модульные приводные составляющие для возведения автоматизированных систем. Направленностью развития сервотехники на ближайшие 10 лет станет внедрение управляющей техники в электромеханические узлы. Многообещающими по использованию привода считаются авто, пищевая, химическая и фармацевтическая отрасли.
www.asutpp.ru
Серводвигатели против шаговых двигателей — ООО «Артель» ЛТД
Серводвигатели против шаговых двигателей.
Что такое шаговый электродвигатель и принцип его работы:Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Шаговые двигатели можно отнести к группе бесколлекторных двигателей постоянного тока. Шаговые двигатели, имеют высокую надежность и большой срок службы, что позволяет использовать их в индустриальных применениях. При увеличении скорости двигателя, уменьшается вращающийся момент.
Шаговые двигатели делают больше вибрации, чем другие типы двигателей, поскольку дискретный шаг имеет тенденцию хватать ротор от одного положения к другому. За счет этого шаговый двигатель во время работы очень шумный. Вибрация может быть очень сильная, что может привести двигатель к потери момента. Это связано с тем, что вал находится в магнитном поле и ведет себя как пружина. Шаговые двигатели работают без обратной связи, то есть не используют Энкодеры или резольверы для определения положения.
Типы:
Существует четыре главных типа шаговых двигателей:
- Шаговые двигателя с постоянным магнитом
- Гибридный шаговые двигателя
- Двигатели с переменным магнитным сопротивлением
- Биполярные и униполярные шаговые двигатели
Преимущества Шагового двигателя:
- Устойчив в работе
- Работает в широком диапазоне фрикционных и инерционных нагрузок и скоростей, скорость пропорциональна частоте входных импульсов.
- Нет необходимости в обратной связи
- Намного дешевле других типов двигателей
- Подшипники — единственный механизм износа, за счет этого долгий срок эксплуатации.
- Превосходный крутящий момент при низких скоростях или нулевых скоростях
- Может работать с большой нагрузкой без использования редукторов
- Двигатель не может быть поврежден механической перегрузкой
- Возможность быстрого старта, остановки, реверсирования
Главным преимуществом шаговых приводов является точность. При подаче потенциалов на обмотки, шаговый двигатель повернется строго на определенный угол. Шаговый привод, можно приравнять к недорогой альтернативе сервоприводу, он наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Недостатки шагового двигателя:
- Постоянное потребление энергии, даже при уменьшении нагрузки и без нагрузки
- У шагового двигателя существует резонанс
- Из-за того что нет обратной связи, можно потерять положение движения.
- Падение крутящего момента на высокой скорости
- Низкая ремонтопригодность
Применение.
Шаговые двигателя имеет большую область применения в машиностроении, станках ЧПУ, компьютерной технике, банковских аппаратах, промышленном оборудовании, производственных линиях, медицинском оборудовании и т.д.
Что такое серво двигатель и принцип его работы:
Серводвигателя делятся на категории щеточные (коллекторные) и без щеточные (без коллекторные) . Щеточные (коллекторные) серводвигатели могут быть постоянного тока, без коллекторные серводвигатели могут быть постоянного и переменного тока. Серводвигатели с щетками (коллекторные), имеют один недостаток каждые 5000 часов необходима замена щеток. На серводвигателях всегда есть обратная связь, это может быть энкодер или резольвером. Обратная связь необходима, чтобы достичь необходимой скорости, либо получить нужный угол поворота. В случаях высоких нагрузок и если скорость окажется ниже требуемой величины, ток пойдет на увеличение , пока скорость не достигнет нужной величины, если сигнал скорости покажет, что скорость больше, чем нужно, ток, пойдет на уменьшение. При использовании обратной связи по положению, сигнал о положении можно использовать чтобы остановить двигатель, после того, как ротор двигателя приблизится к нужному угловому положению.
АС серводвигатель — двигатель переменного тока. В ценообразовании двигатель переменного тока дешевле двигателя постоянного тока. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели и коллекторные.
В синхронных двигателях переменного тока ротор и магнитное поле вращается синхронно с одинаковой скоростью и в одном направлении с статором, а в асинхронных двигателях переменного тока ротор вращается несинхронно по отношению с магнитным полем. В асинхронном двигателе из-за отсутствия коллектора (щетки) регулировка оборотов происходит за счет изменения частоты и напряжения.
DC серводвигатель — двигатель постоянного тока.
Серводвигатели постоянного тока из за своих динамических качеств могут быть использованы приводом непрерывного действия. Серводвигатели постоянного тока могут постоянно работать в режимах старт, остановка и работать в обоих направлениях вращения. Обороты и развиваемый крутящий момент можно изменять путем изменения величины напряжения тока питания или импульсами.
Преимущества серводвигателей:
- При малых размерах двигателя можно получить высокую мощность
- Большой диапазон мощностей
- Отслеживается положение, за счет использования обратной связи
- Высокий крутящий момент по отношении к инерции
- Возможность быстрого разгона и торможения
- При высокой скорости, высокий крутящий момент
- Допустимый предел шума при высоких скоростях
- Полное отсутствия резонанса и вибрации
- Точность позиционирования
- Широкий диапазон регулирования скорости.
- Точность поддержания скорости и стабильность вращающего момента.
- Высокий статический момент Мо при нулевой скорости вращения.
- Высокая перегрузочная способность: Mmax до 3.5Mo, Imax до 4Io
- Малое время разгона и торможения, высокое ускорение (обычно > 5 м/с2 ).
- Малый момент инерции двигателя, низкий вес, компактные размеры.
Пример работы двигателя:
На данном примере я перескажу вам принцип работы серводвигателя. После того, как вы сгенерировали управляющую программу, она создается в системе G-кодов, то есть ваша линия, окружность или любой созданный вами объект конвертируется в перемещение по координатам X,Y, Z на определённое расстояние. За расстояние отвечают импульсы, которые подаются через блок управления на двигатель. При перемещении любой из осей, например на 100 мм, драйвер (блок управления) подает определённое напряжение на двигатель, вал двигателя (ротор). Вал двигателя соединен с ходовым винтом (ШВП), вращение оборотов двигателя отслеживается энкодер. При вращении ходового винта по любой из осей, потому что при использовании серво, энкодеры (обратная связь) устанавливаются на тех осях, где вы хотите определить положение, на энкодер подаются импульсы, которые считываются системой управления ЧПУ. Системы ЧПУ программируются так, что ни понимают что, например, для перемещения на 100 мм необходимо получить определенное количество импульсов. Пока система ЧПУ не получит нужное количество импульсов на вход драйвера (блока управления) будет подаваться напряжение задания (рассогласование). Когда портал станка проедет заданные 100 мм, система ЧПУ получит нужное количество импульсов и напряжение на входе драйвера упадет до 0 и двигатель остановится. Прошу вас заметить, что преимущество обратной связи в том, что если по какое то либо причине произойдет смещение портала станка, энкодер отправит на систему управления нужное количество импульсов, для подачи нужного напряжения на согласования драйвера (блока управления), и двигатель поменяет угол. Для того что разногласие было равно 0, это помогает удерживать станок в заданной точке с высокой точностью. Не все типы двигателей способны, обеспечивать динамику разгона, нужный крутящий момент и т. п.
Сравнительная характеристика по основным параметрам | ||
|---|---|---|
| Шаговые двигатели | Серво двигателя | |
|
Срок эксплуатации и обслуживание |
Шаговые двигатели – нет щеток, это увеличивает срок эксплуатации до многих лет, единственным слабым местом являются подшипники, могут работать в большом диапазоне высоких температур. Срок эксплуатации в разы дольше любого типа двигателя. |
Из всех видов серво двигателей, самые дешевые это двигателя коллекторного типа (со щетками), они менее надежны, чем шаговые двигатели и требуют замены щеток примерно через 5000 часов непрерывной работы. |
|
Ремонт |
Очень тяжело повредить и износить подшипник. Как и в любом двигателе возможно повреждение обмотки двигателя. Из низкой цены проще купить новый шаговый двигатель. |
В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать. |
|
Точность перемещений |
При использование точных механизмов, может быть не ниже +/- 0.01 мм |
сервоприводы имеют высокую динамическую точность до 1-2мкм и выше (1 мкм = 0.001 мм) |
|
Скорость перемещения |
В лазерно гравировальных станках скорость 20 – 25 метров в минуту. Если мы говорим о фрезерных станках ЧПУ с тяжелыми порталами и балками. Максимальная скорость перемещения до 9 м/мин. |
С использованием сервоприводов в станках с ЧПУ возможно достижение скоростей до 60 м/мин при использование высокосортной механике. |
|
Скорость разгона |
до 120 об/мин за секунду |
до 1000 об/мин за 0,2 секунды |
|
Потеря шагов при повышении скорости и нагрузки |
При высоких скоростях и высоких нагрузках происходит потеря шагов. Эта не проблема возможна при воздействии внешних факторов: ударов, вибраций, резонансов и т.п. |
У серво двигателей присутствует обратная связь, что полностью исключает потерю шагов. |
|
Принудительная остановка (столкновение с препятствием) |
Принудительная остановка шагового двигателя не вызывает у него никаких повреждений |
В случае принудительной остановки серводвигателя, драйвер мотора должен правильно среагировать на данную остановку. В противном случае по обратной связи подается сигнал на доработку не пройденного расстояния, повышается ток на обмотках, двигатель может перегреться и сгореть! |
|
Разница в цене |
По цене шаговый двигатель намного дешевле своего товарища серво двигателя. |
Минимум в 1,5 раз дороже шагового двигателя. |
Каждый тип двигателя предназначен для своей задачи. В некоторых случаях нужно использовать шаговых двигатель, а для некоторых задач необходимо использовать только серво двигатель. В фрезерных станках ЧПУ широко используются оба типа двигателей, просто у каждого из них есть свои задачи, и иногда не целесообразно переплачивать за серво, при небольших объемах производства.
Подведем черту сравнения серводвигателей и шаговых двигателей:
Как и было сказано раньше, шаговый двигатель не может вам дать высокую скорость и мощность и поэтому одно из его применений — в станках ЧПУ недорого сегмента, например фрезерных деревообрабатывающих станках с ЧПУ «АртМастер» 2112, 2515, 3015базовой комплектации. Данный вид станков на средней скорости покроет большой ассортимент работ: обработки дерева, пластика, ДСП, МДФ, легких металлов и других материалов.Если же вас не устраивают скоростные характеристики, Вам необходимо рассмотреть фрезерные деревообрабатывающие станки с ЧПУ «АртМастер» 2112, 2515, 3015(авт.) и высокоскоростной фрезерный деревообрабатывающий станок «АртМастер 3015 Racer».
Вы всегда должны для себя понимать, что сервомоторы позволяют вам с экономить время на холостых переходах, при этом вы не должны забывать правильно оптимизировать количество проходов. Скорость фрезеровки всегда зависит от мощности режущего инструмента (электрошпинделя) и типа фрезы. Мы не сможете получить хорошую скорость фрезеровки при низком качестве инструмента. Вы получите либо брак в изделии, либо Вам потребуется постоянная замена режущего инструмента. То есть при использовании высоких скоростей, при обработке материала вы не должны забывать о качестве и типе инструмента для фрезеровки. Дорогой инструмент не только быстрее режет, но и служит дольше. И прошу не забывать другое преимущество серво: высокая скорость и производительность в разы выше, чем у шагового при фрезеровке объёмных изображений (фото), резьбы (фото). При наличии смены инструмента, вакуумного стола вы можете оптимизировать ваше производство и минимизировать отходы.Если вы хотите добиться увеличения объёмов выполненной работы на вашем производстве, решение только одно — сервомоторы, а для старта или изготовления фасадов, дверей, столешниц, и прямолинейного, криволинейного раскроя при объёмах производства от 500-1000 кв.м, вы можете остановить свой выбор на станках с шаговыми двигателями.
artelua.com
Принцип работы сервоприводов
Принцип работы
Вентильные электродвигатели
Вентильные двигатели – это синхронные бесколлекторные (бесщёточные) машины. На роторе находятся постоянные магниты из редкоземельных металлов, на статоре — якорная обмотка. Коммутация обмоток статора осуществляется полупроводниковыми силовыми ключами (транзисторами) так, чтобы вектор магнитного поля статора был всегда перпендикулярен вектору магнитного поля ротора — для этого используется датчик положения ротора (датчик Холла или энкодер). Фазный ток регулируется с помощью ШИМ-модуляции и может иметь трапецеидальную или синусоидальную форму.
Линейные серводвигатели
Плоский ротор линейного двигателя сделан из редкоземельных постоянных магнитов. По принципу действия он похож на вентильный двигатель.
Шаговые электродвигатели
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления – их коммутация выполняется внешним приводом.
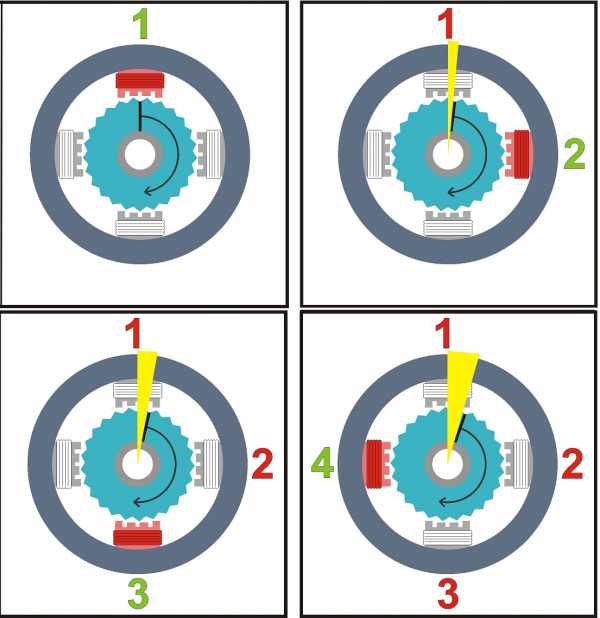
Рассмотрим принцип работы реактивного шагового двигателя, у которого на полюсах статора расположены зубцы, а ротор выполнен из магнитомягкой стали и тоже имеет зубцы. Зубцы на статоре расположены так, что на одном шаге магнитное сопротивление меньше по продольной оси двигателя, а на другом – по поперечной. Если дискретно возбуждать в определённой последовательности обмотки статора постоянным током, то ротор при каждой коммутации будет поворачиваться на один шаг, равный шагу зубцов на роторе.
Сервопривод
Некоторые модели преобразователей частоты могут работать как со стандартными асинхронными двигателями, так и с серводвигателями. То есть основное отличие сервоприводов не в силовой части, а в алгоритме управления и скорости вычислений. Поскольку в программе используется информация о положении ротора, то у сервопривода есть интерфейс для подключения энкодера, установленного на валу двигателя.
Сервоконтроллер
В сервосистемах используется принцип подчинённого управления: контур тока подчинён контуру скорости, который в свою очередь подчинён контуру положения (см. теорию автоматического управления). Сначала настраивается самый внутренний контур – контур тока, потом – контур скорости и самым последним настраивается контур положения.
Контур тока всегда реализован в сервоприводе.
Контур скорости (как и датчик скорости) также всегда присутствует в сервосистеме, он может быть реализован как на базе встроенного в привод сервоконтроллера, так и внешнего.
Контур положения используется для точного позиционирования (например, осей подач в станках с ЧПУ). Если в кинематических связях между исполнительным органом (координатным столом) и валом двигателя нет люфтов, то координата косвенно пересчитывается по значению кругового датчика. Если люфты есть, то на исполнительный орган устанавливается дополнительный датчик положения (который подключается к сервоконтроллеру) для прямого измерения координаты. Те есть, в зависимости от конфигурации контуров скорости и положения подбирается соответствующий сервоконтроллер и сервопривод (не в любом сервоконтроллере можно реализовать контур положения!).
Как выбрать сервопривод
Основные функции сервосистем
- Позиционирование (Positioning)
- Интерполяция (Interpolation)
- Синхронизация, электронный редуктор (Gear)
- Точное поддержание скорости вращения (шпиндель станка)
- Электронный кулачок (Cam)
- Программируемый логический контроллер.
Компоненты сервосистемы
В общем случае сервосистема (Motion Control System) может состоять из следующих устройств:
- Серводвигатель (Servo Motor) с круговым датчиком обратной связи по скорости (он же может выполнять функцию датчика положения ротора)
- Серворедуктор (Servo Gear)
- Датчик положения исполнительного механизма (например, линейный датчик координаты оси подач)
- Сервопривод (Servo Drive)
- Сервоконтроллер (Motion Controller)
- Операторский интерфейс (HMI).
Варианты аппаратно-программной реализации сервосистемы
- Сервосистема на базе ПЛК (PLC-based Motion Control)
- Функциональный модуль управления перемещением добавляется в корзину расширения ПЛК
- Автономный сервоконтроллер
- Сервосистема на базе ПК (PC-based Motion Control)
- Специальный софт Motion Control для планшетного ПК с пользовательским интерфейсом (HMI)
- Programmable Automation controller (PAC) с функцией управления перемещением
- Сервосистема на базе привода (Drive-based Motion Control)
- Преобразователь частоты со встроенным сервоконтроллером
- Опциональное программное обеспечение, которое загружается в привод и дополняет его функциями управления движением
- Опциональные платы с функциями управления движением, которые встраиваются в привод.
Типы серводвигателей
- Синхронные
Компактные бесщёточные серводвигатели с возбуждением от постоянных магнитов (вентильные), обеспечивающие высокую динамику и точность.
- Асинхронные
Приводы главного движения и шпинделей инструментальных станков.
- Прямой привод (Direct Drive)
- Линейные двигатели (Linear Motors) могут поставляться вместе с профильными рельсовыми направляющими
- Моментные двигатели (Torque Motors) — синхронные многополюсные машины с возбуждением от постоянных магнитов, с жидкостным охлаждением, ротор с полым валом. Обеспечивают высокую точность и мощность на низких оборотах.
Прямой привод не содержит промежуточных передаточных механизмов (шарико-винтовых пар, ремней, редукторов):
Преимущества серводвигателей
- Высокое быстродействие, динамика и точность позиционирования
- Высокомоментные
- Малоинерционные
- Большая перегрузочная способность по моменту
- Широкий диапазон регулирования
- Бесщёточные.
Преимущества линейных приводов
Отсутствие кинематических цепей для преобразования вращательного движения в линейное:
- Меньше инерционность
- Нет зазоров
- Меньше температурные и упругие деформации
- Меньше износ и снижение точности при эксплуатации
- Меньше потери на трение – выше КПД.
Точность
Микронная точность требуется в металлообрабатывающих станках с ЧПУ, а в штабелёрах достаточно и сантиметра. От точности зависит выбор серводвигателя и сервопривода.
- Точность позиционирования
- Точность поддержания скорости
- Точность поддержания момента.
Приводы и двигатели постоянного тока
Электродвигатели
www.maxplant.ru